全文HTML
--> --> -->然而, 以往SMBI的研究工作主要是通过等离子体对注入束流响应特性逆向开展, 即通过测量分子束注入前后的等离子体参数变化而开展, 另外在装置上开展分子束特性研究受装置窗口等原因限制, 没有开展系统的定量研究工作, 分子束束流基本参数的测量直接关系到喷嘴阀门的优化设计. 没有束流的直接测量数据一方面对未来聚变堆级装置上发展和优化SMBI注入技术带来诸多困难; 另一方面, 加料效率研究以及束流与等离子体相互作用的深入物理分析, 都需要以束流信息为基础支撑. 因此, 超声分子束束流参数的测量, 不仅有利于进一步探索高效加料效率, 控制再循环, 还有利于物理实验和数值模拟的深入开展. 另外, 束流参数的测量对于超声分子束的束流特性优化, 以及等离子体物理深入认知有着重要的科学意义, 对于聚变加料领域发展也有着重要的指导意义.
纹影法是常用的流体显示技术之一, 是利用纹影成像系统进行流场显示和测量的一种经典的光学测量方法. 把具有高时间分辨率的高速相机与纹影方法结合起来, 即为高速纹影方法. 纹影法的基本原理是根据Gladstone-Dale定律利用光在被测流场中的折射率梯度正比于流场的气流密度的基本原理进行测量的[20]. 纹影系统最常用的是平行光纹影系统, 主要分为透射式和反射式两种, 其中透射式纹影系统部件呈直线布置, 光路调节简单, 但要加工大口径的双球面透镜, 价格昂贵且难度较大. 反射式纹影系统的反射镜通常会产生慧差和像散两类像差, 其中慧差主要是由纹影镜与光轴发生倾斜产生的, 表现为纹影图像照度不均匀. 在光路中调整两面反射镜与中心线的倾斜角, 将倾斜方向调整为相反且倾斜角度相等, 即形成一个“Z”字型的光路, 就能抵消慧差. 像散表现为点光源像未能聚焦成一个点, 它是由光学中心线和反射镜边缘不同的路径长度引起的. 在光路调整中通过设置刀口的方向和位置, 将刀口面调整至整个系统的子午焦平面和径向焦平面上即可减少像散, 最终得到高成像质量的纹影结果[21].
SMBI束流测试主要是测量在不同工况和不同气源下的分子束束流特性与物理参数分布, 通过定量研究分子束的特性与喷嘴的形状、结构尺寸、工作气体的温度、压强等的关系, 用以研发适用于未来聚变堆的新型SMBI注入器, 并基于观测结果更好地开展聚变装置上超声分子束束流与等离子相互作用的研究工作. 本文搭建了一套“Z”字型反射式纹影诊断光路系统, 并基于该系统, 在超声分子束测试平台上分别在背景压强为大气和真空条件下开展了一系列的实验, 测量到了相应条件下分子束束流轮廓纹影图, 验证了该套纹影系统具备在真空背景条件下进行测量的能力. 本文内容如下: 第2部分主要介绍了纹影系统的设计, 以及各关键部件系统描述; 第3部分主要介绍超声分子束束流轮廓测量结果; 最后对全文进行总结.
2.1.光路设计
本文设计的“Z”字型反射式纹影系统, 整个系统有效通光口径为Φ150 mm, 为优化光学系统的空间布置, 在光路中增加了一块平面转折反射镜, 系统光路布置如图1所示. 光源发出的光经内部聚光透镜汇聚在狭缝上, 由狭缝限制光源的大小. 球面反射镜1形成平行光经转折镜穿过真空室扰动区域, 再经球面反射镜2成像于位于球面反射镜2焦点处的刀口上, 经刀口遮挡部分光路, 最终在高速相机像面上呈现反映流场内部扰动的纹影图像. 图 1 纹影系统示意图
图 1 纹影系统示意图Figure1. A diagram of the schlieren system.
2
2.2.光学元器件设计
表1为本文设计的纹影系统中各主要光学元件详细参数. 由于该系统拟在不同工位使用, 故采用分体布局支撑的方式. 另外, 光路调试时需要对其中多个部件进行位置调节, 如偏摆、俯仰、旋转、直线移动等, 系统中将全部采用微分头调节结构进行驱动, 弹簧反向作用的方式进行调节.| 元件名称 | 详细参数 |
| 光源 | 彩色LED, 中心波长532 nm, 功率250 W 且连续可调, 带聚焦透镜及风冷 |
| 狭缝 | 圆孔, 直径小于3 mm可调节, 边缘锐利 无毛刺 |
| 球面反 射镜1,2 | 有效通光口径?150 mm, 焦距2.5 m, 边缘 厚度60 mm, 面型精度1/4波长 |
| 小反射镜1,2 | 有效通光口径?50 mm |
| 平面转折镜 | 有效通光口径?215 mm, 面型精度1/8波长 |
| 观察窗1,2 | 有效通光口径?150 mm, 材质K9, 厚度20 mm |
| 刀口 | 开启宽度5 mm, 步进精度0.01 mm |
| 装调结构 | 中心高度1.1 m, 升降调节精度 ±100 mm |
表1主要系统元件参数
Table1.Parameters of main components.
光源选择方面, 卤钨灯光源无法提供高速流场测量所需的足够照度; 激光光源由于强相干性会产生衍射效应; LED光源波长范围窄近似点光源, 且照度稳定易于控制[22]. 故本文选择LED作为纹影系统的光源. 为便于位置调节, 将光源、狭缝系统以及小反射镜安装在同一根直线导轨上, 如图2(a)所示. 由于考虑真空背景条件对纹影系统灵敏度能力要求高, 本文采用0.1 mm的圆形狭缝进行实验, 如图2(b)所示. 另外, 为满足后续其他测试需求, 本系统配备有直径不等的圆形狭缝及宽度不等的条形狭缝, 如图2(c)所示.
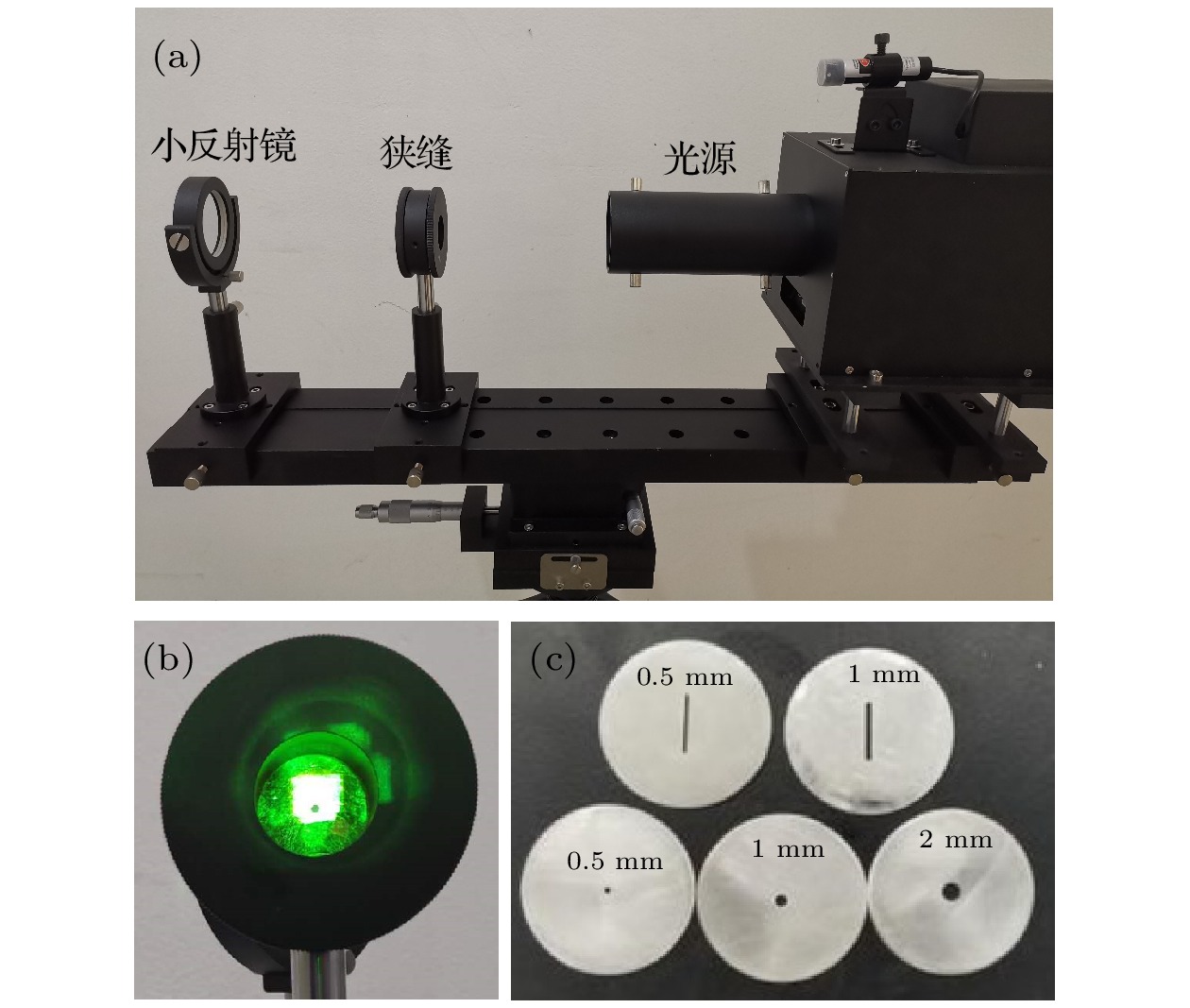 图 2 (a)光源狭缝系统; (b)狭缝机构; (c)不同类型狭缝示意图
图 2 (a)光源狭缝系统; (b)狭缝机构; (c)不同类型狭缝示意图Figure2. (a) Light source and slit system; (b) slit mechanism; (c) diagram of different types of slits.
刀口成像系统主要由刀口与高速相机组成, 小反射镜2与刀口安装于同一导轨上, 以方便安装调试. 其中为了满足精密调节功能, 刀口采用三维调节底座, 可满足垂直、水平两种方式切割光线, 本文中的测量结果均采用水平切割方式获得, 刀口实物如图3(a)所示. 由于使用SMBI注入的工作气体一般为不可见透明气体, 束流速度最高可达2000 m/s, 且束流脉宽为毫秒量级, 为了拍摄到束流在喷嘴处喷出时轮廓变化的整个详细过程, 本文选用了美国Phantom V711超高速相机, 拍摄速度最高可达140 万帧每秒, 最小曝光时间300 ns, 实物如图3(b)所示.
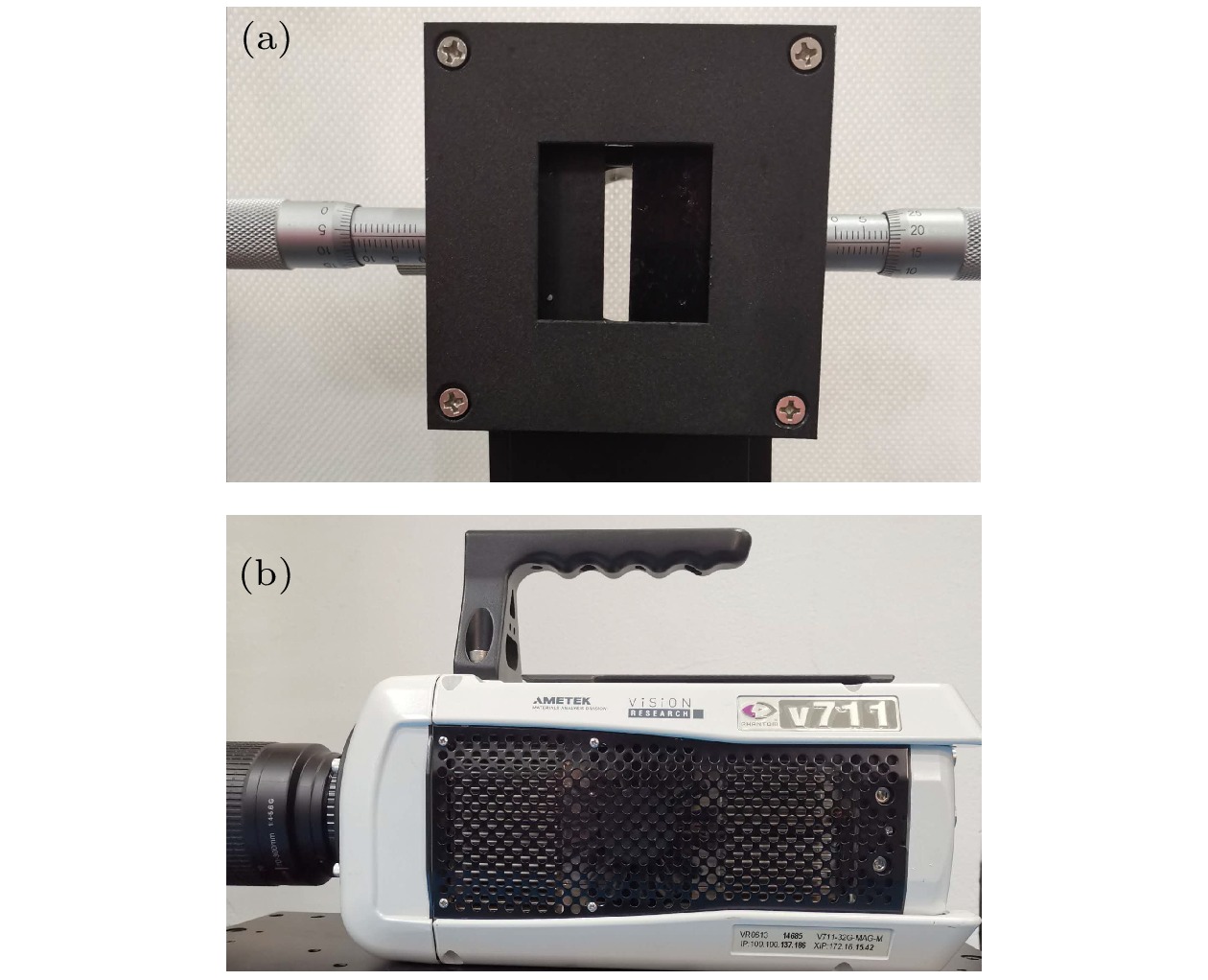 图 3 (a)刀口实物图; (b)高速相机实物图
图 3 (a)刀口实物图; (b)高速相机实物图Figure3. (a) Image of the cutter; (b) image of the high-speed camera
3.1.超声分子束测试平台
超声分子束测试平台是为研制新型超声分子束注入器而建立的一个实验平台, 如图4(a)所示. 整个测试平台主要包括测试真空腔室、真空抽气系统、注入系统以及电控系统. 抽气系统包含3套涡轮分子泵机组, 其抽气速度最高可达1500 L/s; 真空室形状由圆柱形腔体组成, 纵向全长2.2 m, 必要时还可以加长, 最大直径为500 mm, 最小直径为250 mm, 真空度可达(经烘烤除气后) 5 × 10–5 Pa. 在平台上利用诊断系统通过调节分子束阀门的一些参数和改变阀门附加的喷嘴形状, 可检测和调试分子束的性能. 在SMBI系统中, 经常使用的喷嘴类型有圆孔形喷嘴及锥形一体式拉瓦尔喷嘴, 喷嘴剖面如图4(a1)和图4(a2)所示, 其中锥形一体式拉瓦尔喷嘴为核工业西南物理研究院SMBI团队自行设计研制的喷嘴. 另外, 由超声分子束的寂静区长度公式X/d = 0.67(P0/Pb)1/2可得出(X为寂静区长度, d为喷嘴喉道直径, P0为气源压强, Pb为背景压强)背景压强是决定束流特性的关键参数[23]. 因此, 为保证整个真空腔体真空背景压强测量的准确性, 测试平台安装了两个不同量程的高精度薄膜规, 在10–1—104 Pa的范围内较为准确地测量背景压强.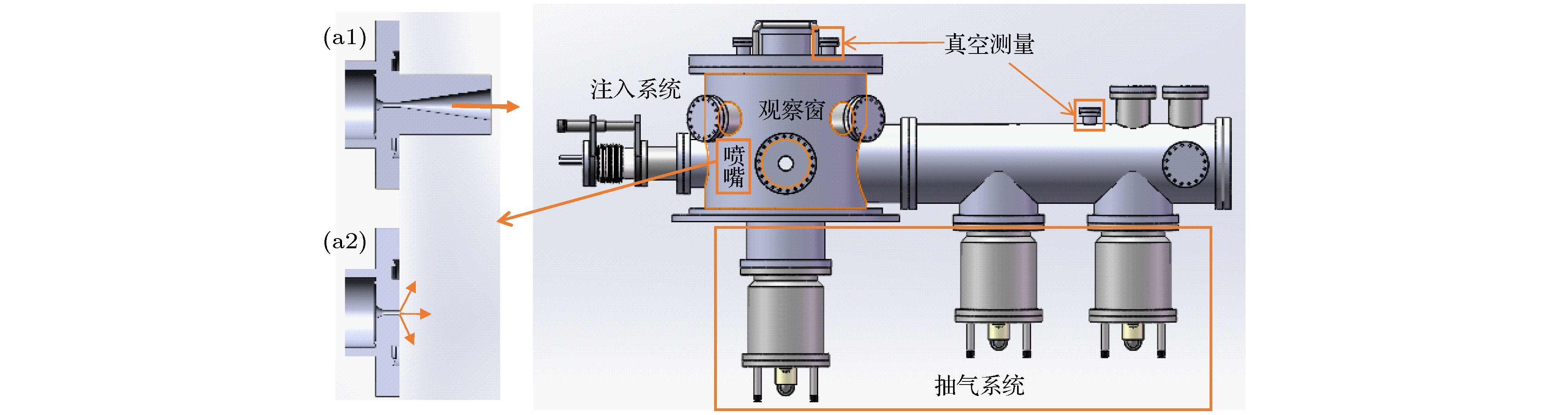 图 4 超声分子束注入测试平台 (a1)锥形一体式喷嘴剖面图; (a2)圆孔喷嘴剖面图
图 4 超声分子束注入测试平台 (a1)锥形一体式喷嘴剖面图; (a2)圆孔喷嘴剖面图Figure4. SMBI testing platform: (a1) cross-section of the integrated conical nozzle; (a2) cross-section of the nozzle with a pinhole.
2
3.2.纹影光路搭建及调试
完成测试平台搭建后需要对纹影系统的光路进行调试, 光路调试的效果直接影响后续纹影测试的结果. 其中几个关键点包括: 1)狭缝位置需位于光源聚焦物镜的焦点处; 2)狭缝至第一反射镜间距离应为该物镜的1倍焦距; 3)刀口位置需位于第二反射镜的焦点位置处.纹影系统主要是利用刀口遮挡不同偏折程度的光线从而得到明暗不同的纹影图像, 其中纹影图像中的明暗程度与被测流场中各位置的光线偏折程度相对应. 另外, 整个系统的灵敏度跟反射镜2的焦距成正比, 与刀口切割通过量成反比[24], 故刀口装置在整个系统中是非常重要的部件. 对于普通的线性刀口, 只对垂直于刀刃方向上的偏折光线敏感, 所以在调节前需要确定被测流场所关注的密度梯度变化的方向, 由于本文中的狭缝设计采用圆形狭缝, 故无需考虑刀口与狭缝方向是否一致. 图5描述的是未引入流场时, 刀口分别在焦点前、焦点上及焦点后3个位置时相机成像的图像效果, 可以看出, 只有刀口位置处于焦点上时成像的亮度才是最均匀的, 位置在焦点前或焦点后时纹影画面就会发生单侧变暗的现象, 调节刀口至反射镜2的焦点位置是整个纹影图像成像质量的关键.
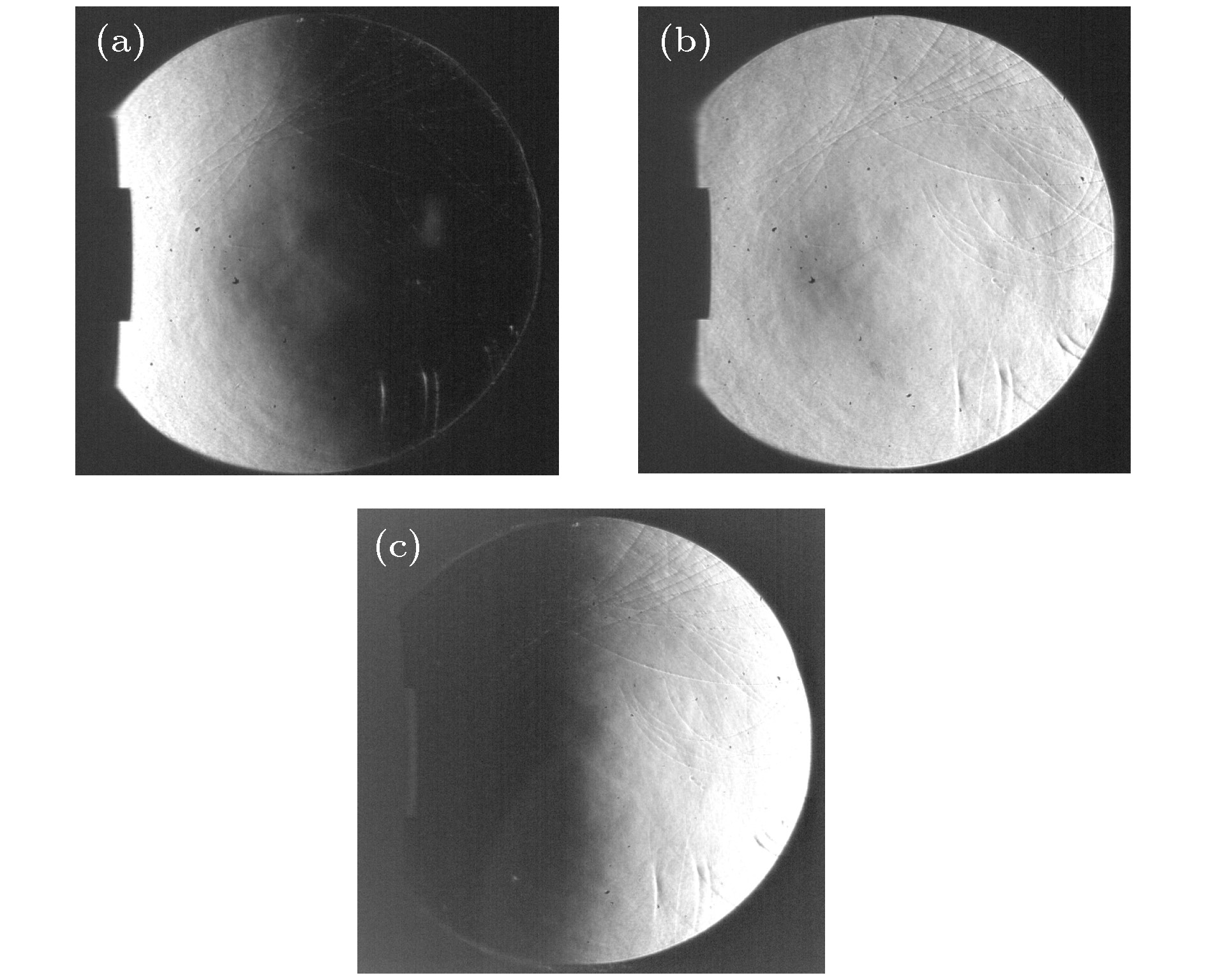 图 5 刀口在(a)焦点前、(b)焦点上、(c)焦点后位置处的纹影图
图 5 刀口在(a)焦点前、(b)焦点上、(c)焦点后位置处的纹影图Figure5. Schlieren images for the cutter point located (a) in front of the focus, (b) at the focus and (c) behind the focus.
2
3.3.束流轮廓测量
通过调试好的纹影系统首次拍摄到磁约束聚变超声分子束加料的束流轮廓, 如图6(a)所示. 实验条件: CO2气体, 气压为4 × 106 Pa, 背景压强为103 Pa, 圆孔喷嘴, 尺寸为0.5 mm. 从图6(a)的实验结果可以看到, 分子束束流在喷嘴出口附近经扇形膨胀, 形成等熵区(无激波寂静区), 并且可以观察到前方的圆盘形马赫激波区. 此实验结果与理论预测值(图6(b))十分接近, 进一步验证了超声分子束注入技术的有效性.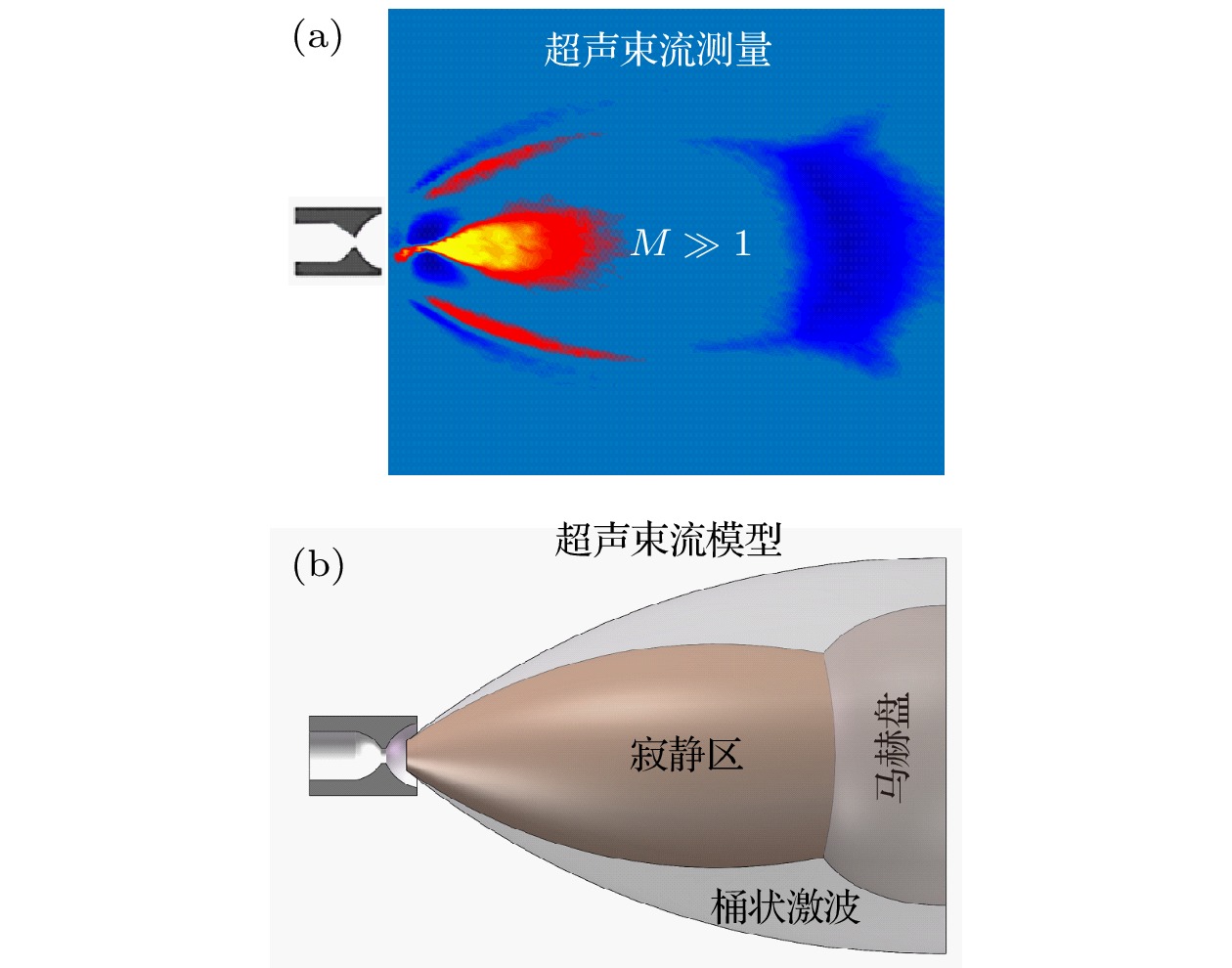 图 6 (a) SMBI束流轮廓纹影图(M为马赫数); (b) 超声束流理论示意图
图 6 (a) SMBI束流轮廓纹影图(M为马赫数); (b) 超声束流理论示意图Figure6. (a) The measured schlieren image of SMBI beam (M is Mach number); (b) a theoretical diagram of supersonic beam.
为确认整个纹影系统的有效性, 本文开展了一系列针对不同形状喷嘴、不同气体在不同背景压强下的束流特性测量实验, 验证在不同工况下纹影系统测量分子束束流的可靠性. 在测试平台腔室背景压强为105 Pa, 使用圆孔喷嘴和锥形一体式喷嘴分别注入同等气压及脉冲的D2和CO2气体, 进行束流注入时喷嘴处的纹影拍摄结果如图7和图8所示. 实验条件为气源压强4 × 106 Pa, 脉宽40 ms. 纹影图中描述的是束流注入引起的密度梯度导致光线偏折, 从而反映在高速相机上的光强度变化(I). 图中密度变化引起的光强度变化量(ΔI)由当前强度值(I)减去初始背景强度值(I0)得出. 颜色代表光强度变化量的大小.
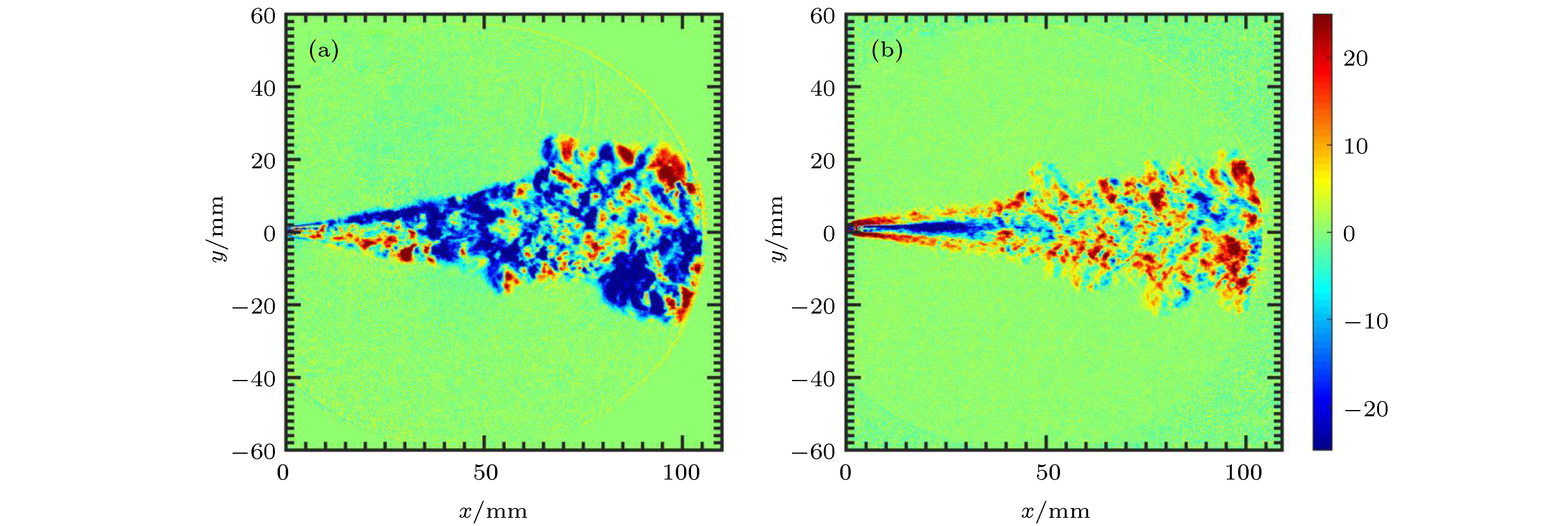 图 7 (a) D2和(b) CO2气体在圆孔喷嘴出口处的纹影图, 背景压强为105 Pa
图 7 (a) D2和(b) CO2气体在圆孔喷嘴出口处的纹影图, 背景压强为105 PaFigure7. Schlieren images of (a) D2 and (b) CO2 gas with a pinhole nozzle under the atmospheric condition.
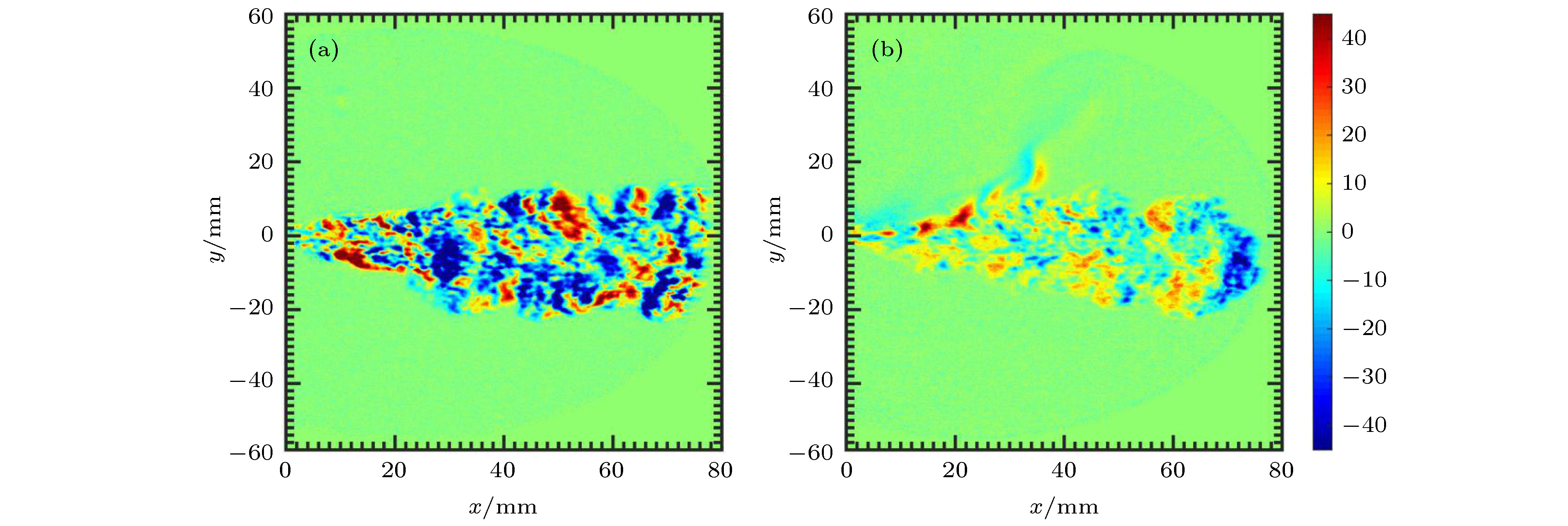 图 8 (a) D2和(b) CO2气体在锥形一体式喷嘴出口处的纹影图, 背景压强为105 Pa
图 8 (a) D2和(b) CO2气体在锥形一体式喷嘴出口处的纹影图, 背景压强为105 PaFigure8. Schlieren images of (a) D2 and (b) CO2 gas with integrated conical nozzle under the atmospheric condition.
实验结果显示, 当背景压强处于大气条件时, 该纹影系统能够清晰地测量到束流的轮廓及内部特征. 从纹影图像中初步能够看出: 不同气体在同一工况下使用相同喷嘴注入后, 束流整体轮廓及发散程度差别不大, 但束流内部密度梯度变化量截然不同, 这与气体分子自身的结构特性及折射率有关; 相同气体在同一工况下使用不同喷嘴注入后, 喷嘴出口处的束流轮廓存在差异, 且束流密度梯度变化量也不相同, 说明喷嘴的形状直接影响束流特性.
另外测试了CO2气体在相同工况下, 分别注入喉道直径分别为0.5和0.25 mm的圆孔喷嘴时束流轮廓的纹影变化图, 如图9所示. 实验条件如下: 注入气体为CO2, 气体压强为4 × 106 Pa, 脉宽40 ms, 平台背景压强105 Pa. 从图9可以看到0.25 mm的喷嘴束流整体轮廓宽度小于0.5 mm喷嘴喷出的束流, 但是两个喷嘴喷出的束流轮廓形状以及束流内部密度梯度变化量一致. 这个实验结果进一步验证了束流特征与喷嘴形状相关.
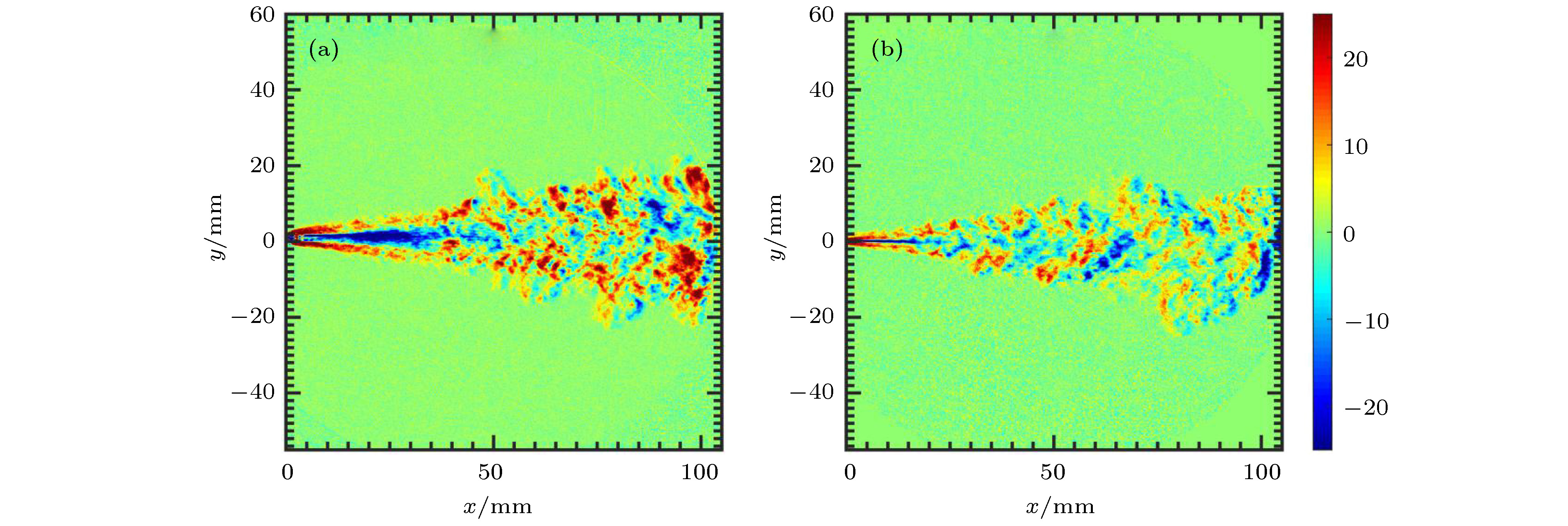 图 9 CO2气体在不同直径的圆孔喷嘴出口处的纹影轮廓图(背景压强为105 Pa) (a) 0.5 mm; (b) 0.25 mm
图 9 CO2气体在不同直径的圆孔喷嘴出口处的纹影轮廓图(背景压强为105 Pa) (a) 0.5 mm; (b) 0.25 mmFigure9. Schlieren images of CO2 gas with nozzles of different pinholes under the atmospheric condition: (a) 0.5 mm; (b) 0.25 mm.
最后, 利用真空抽气系统将测试平台腔体背景压强降低至5 × 102 Pa, 以验证纹影系统在背景压强逐渐变低的工况下的有效性. 实验条件为: 注入气体为CO2, 气体压强为4 × 106 Pa, 脉宽40 ms. 分别使用圆孔和锥形一体式喷嘴进行注入后的纹影轮廓图对比, 如图10所示.
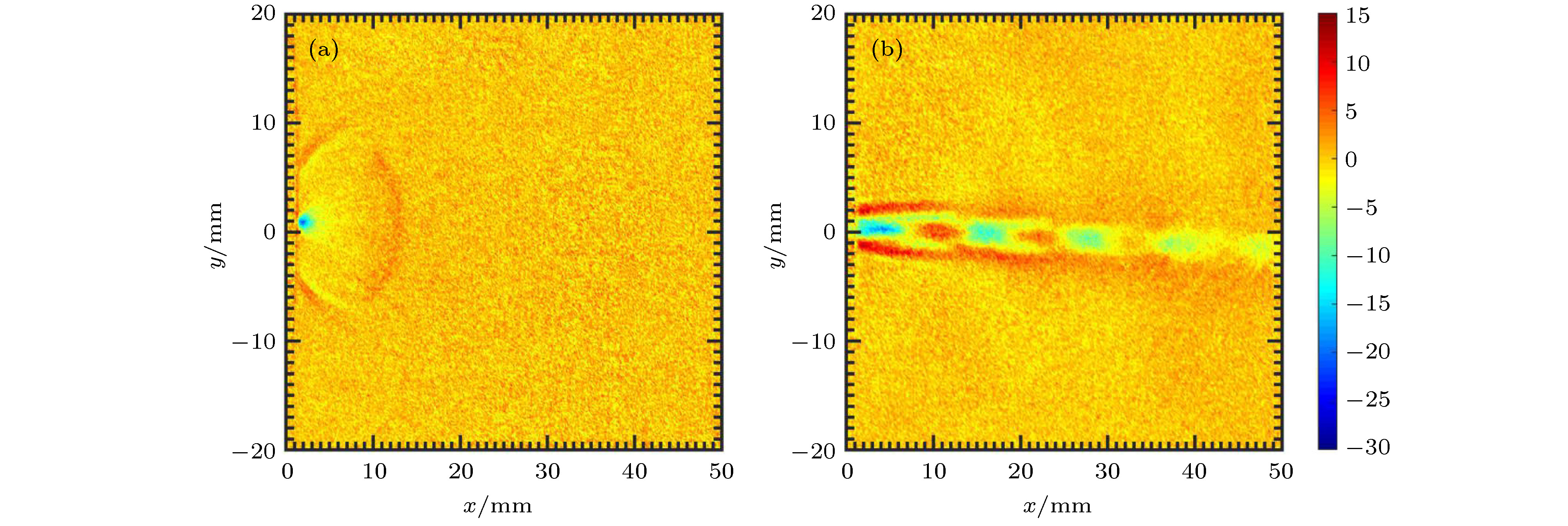 图 10 CO2气体在不同喷嘴出口处的纹影轮廓图(背景压强为5 × 102 Pa) (a) 0.25 mm 圆形喷嘴; (b) 0.25 mm 锥形一体式喷嘴
图 10 CO2气体在不同喷嘴出口处的纹影轮廓图(背景压强为5 × 102 Pa) (a) 0.25 mm 圆形喷嘴; (b) 0.25 mm 锥形一体式喷嘴Figure10. Schlieren images of CO2 gas with different nozzles under the vacuum condition (5 × 102 Pa): (a) A pinhole nozzle with a diameter of 0.25 mm; (b) integrated conical nozzle with a diameter of 0.25 mm.
从上述实验结果可以看出, CO2气体通过超声分子束系统注入到真空中, 在圆形喷嘴处束流轮廓呈明显的发散状态, 整个束流轮廓角度约为100°, 能够观察到马赫盘轮廓; 而通过锥形一体式喷嘴后整个束流轮廓发散角度约为13°, 分子束的聚束能力显著提升, 且束流形成的一系列马赫环清晰可见. 测试结果进一步证明该纹影系统能够测量到真空下超声分子束束流在不同喷嘴下的束流轮廓, 这为后续喷嘴的进一步优化和设计工作提供了关键测试手段.
