Aydin[4]和Gon?alves等[5]给出了基于小波变换检测多普勒信号的自适应阈值设计; Maali等[6]提出了改进的单元平均恒虚警(CA-CFAR)算法对超宽带雷达信号的TOA(Time-of-Arrival)进行估计,实现自适应阈值检测; Mata-Moya等[7]利用预处理技术和似然比检验设计了自适应检测算法用于IPIX雷达在K杂波中多目标情况下的检测,并且与CA-CFAR算法进行对比,证明了其良好的检测性能; Aubry等[8]根据最大似然估计理论设计了在均匀杂波和多目标干扰的环境中对点状目标的自适应检测判决方案; Xiao等[9]分析了有色高斯噪声中的信号检测和估计问题,并提出了一种新的自适应的广义似然比检验算法。这些检测方法都仅适用于时域中的信号检测,对信噪比(SNR)有很高的要求,一般时域中检测需要信噪比大于10 dB。将时域信号进行傅里叶变换后得到信号的频谱,根据频谱中信号的幅值进行检测是一种有效的检测手段,并且可以适应更低的信噪比。
因此,为了提高LDV的检测性能,降低虚警概率,本文根据噪声在频域中的统计特性,设计了基于频域的单元平方和自适应阈值检测算法用于多普勒信号的检测。
1 基于频域的单元平方和检测算法 传统的CA-CFAR算法是在时域中对目标信号进行检测,对信噪比要求较高。在CA-CFAR检测器中,背景干扰的功率水平的估计由R个参考单元的均值得到[10-11]。图 1为CA-CFAR检测器的基本原理框图,图中:D为待检测单元; x1, x2, …, xn与y1, y2, …, yn为参考单元; Z为检测统计量; X为左侧参考单元值总和; Y为右侧参考单元值总和; T为检测阈值; α为门限系数。
 |
| 图 1 单元平均恒虚警检测原理框图 Fig. 1 Functional block diagram of CA-CFAR detector |
| 图选项 |
为了使检测算法适用于更低的信噪比,需要在频域中进行信号检测。首先将回波信号进行傅里叶变换并取其模的平方值,使信号和噪声的幅值在频谱中区分明显,增大了可检测的信噪比范围。然后根据多普勒信号的特点设计带阻滤波器,对频谱中信号的频率带进行带阻滤波,滤波后的剩余信号可认为全部是噪声,然后采用邻近参考单元的平均值计算检测门限,最后根据门限进行判断。
1.1 噪声的频域统计特性 激光多普勒测速仪采集到的回波信号中的噪声近似服从高斯分布,其概率密度函数为
 | (1) |
式中:ε为噪声幅值;σ2为噪声的强度方差。
在时域中抽取长度为N1的噪声序列进行傅里叶变换得到噪声在频域中的表达式:
 | (2) |
式中:m=0, 1, …, N1-1, 故

 | (3) |
式中:
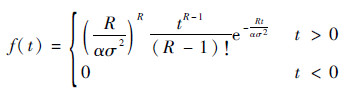
1.2 自适应阈值检测的虚警概率 在式(3) 中令YSN=|NOISE(m)|2,则YSN的概率密度函数为
 | (4) |
则当Y > 0时,利用待检测单元D周围R个邻近单元来估计参数σ2,可求得参数σ2的最大似然估计:
 | (5) |
则要求的门限可以由噪声的方差乘以一个系数得到,即
 | (6) |
令



 | (7) |
则虚警概率为
 | (8) |
门限系数α为
 | (9) |
1.3 带阻滤波器设计 在导航用测速仪检测带宽内,通常有用信号频谱展宽较小[13-14],因此为实现单元平方和检测算法,本文利用带阻滤波器从回波信号中分离出噪声。
带阻滤波器的阻带宽度关系到滤波的准确性,其阻带宽度越窄,输出的噪声信号越准确,但是其阻带宽度不能小于多普勒信号的宽度。在回波信号的频谱中,多普勒信号的频谱宽度为[15]
 | (10) |
式中:v为载体运动速度;αs为激光束与载体运动方向的夹角;ω(zs)为信号光传播zs距离后的高斯光束等相位面上的光斑半径。
设采样频率为fs,由采样定理可知,能检测到的多普勒频率的最大值为采样频率的一半,即fs/2,则最大测速范围为
 | (11) |
式中:λ为激光的波长。
由式(11) 可得,带阻滤波器的阻带宽度k最小为
 | (12) |
2 仿真分析与实验验证 2.1 仿真分析 为验证本文设计的算法的性能,并且与固定阈值作对比,设计了3组仿真,仿真参数如表 1所示。
表 1 仿真参数 Table 1 Simulation parameters
| 参数 | 数值 |
| ?采样频率/Hz | 1000 |
| ?信噪比/dB | -30~0 |
| ?噪声功率/W | 0~25 |
| ?信号频率/Hz | 200 |
| ?滤波器带宽 | 0.2 |
表选项
首先仿真了在不同参考单元数R下检测概率随信噪比的变化,并进行曲线拟合(见图 2),设置虚警概率为0.000 1,信噪比为-30~0 dB。
 |
| 图 2 不同参考单元数下检测概率随信噪比变化 Fig. 2 Variation of detection probability with SNR under different reference cells |
| 图选项 |
由图 2可知,随着参考单元数R的增加,该算法的检测性能逐渐提高,在R=12和R=16时该算法的检测性能变化不大。但是随着R的增大,算法的运算时间会增加,因此考虑到LDV的实时性要求,应当选择R=12。
然后对不同噪声功率下的虚警概率进行仿真,并进行曲线拟合(见图 3),设置噪声功率为0~25 W,参考单元数R=12,对比本文自适应阈值检测与固定阈值检测的虚警性能。
 |
| 图 3 虚警概率随噪声功率变化的曲线 Fig. 3 Variation of false alarm probability with noise power |
| 图选项 |
由图 3可知,随着噪声功率的增加,自适应阈值检测算法的虚警概率为保持在0.1以下,具有良好的恒虚警能力,而固定阈值检测在噪声功率处于0~17 W时虚警概率变化不大,噪声功率超过17 W之后其虚警概率急剧增加。由此表明该自适应阈值检测相比于固定阈值检测对噪声环境具有更强的适应能力。
最后仿真了在不同虚警概率的设置下,检测概率随信噪比的变化,并进行曲线拟合(见图 4),设置信噪比为-30~0 dB,参考单元数R=12。
 |
| 图 4 不同虚警概率下检测概率随信噪比变化 Fig. 4 Variation of detection probability with SNR under different false alarm probabilities |
| 图选项 |
由图 4可知,检测性能随着虚警概率的下降而减弱,在虚警概率为0.000 1时,该算法在信噪比为-12 dB时检测概率达到1.0。
由此表明在频域内该自适应阈值检测算法可以在低虚警概率下检测到信噪比为-12 dB的信号。
2.2 实验验证 本文利用激光多普勒测速仪设计了2组实验进行验证,装置如图 5所示,其中ωs为转台角速度。
 |
| 图 5 实验安装示意图及照片 Fig. 5 Schematic diagram and photo of experimental installation |
| 图选项 |
激光从LDV出射到转台,出射光束与转台切线夹角为αs,经过转台反射回LDV,LDV对回波信号进行采集处理,将处理后的数据传到电脑中在Labview上显示并存储。
实验使用的LDV采样频率为10 MHz,每次采集1 000个数据后进行检测,一共进行1 000次检测,用超过门限的次数除以1 000计算虚警概率和检测概率,实验参数见表 2。
表 2 实验参数 Table 2 Experimental parameters
| 参数 | 数值 |
| ?波长/nm | 1550 |
| ?采样频率/MHz | 10 |
| ?采样点数 | 1000 |
| ?光斑面积/mm2 | 19.6 |
| ?入射角/rad | π/3 |
| ?滤波器带宽 | 0.2 |
表选项
第1组实验中令转台静止,LDV接收到的回波信号中只含噪声,不包含多普勒信号,分别利用自适应阈值和固定阈值进行检测,对比它们的虚警性能。
图 6为固定阈值及自适应阈值虚警概率实验结果。由图 6可知,固定阈值进行检测时,在1 000次检测中出现了112次错误检测的虚警点,即虚警概率为0.112。自适应检测算法在1 000次检测中出现了5个错误检测的虚警点,即虚警概率为0.005,相比固定阈值虚警概率降低了0.107。
 |
| 图 6 固定阈值及自适应阈值虚警概率实验结果 Fig. 6 Experimental results of false alarm probability of fixed threshold and adaptive threshold |
| 图选项 |
第2组实验中令转台匀速转动,此时回波信号中包含多普勒信号,分别利用自适应阈值和固定阈值进行检测,对比它们的检测性能。
图 7为固定阈值及自适应阈值检测概率实验结果。由图 7可知,固定阈值进行检测时,在1 000次检测中出现了28个错误检测的检测点,即检测概率为0.972。自适应检测算法在1 000次检测中出现了16个错误检测的检测点,即检测概率为0.984,相比固定阈值检测概率提高了0.012。
 |
| 图 7 固定阈值及自适应阈值检测概率实验结果 Fig. 7 Experimental results of detection probability of fixed threshold and adaptive threshold |
| 图选项 |
3 结论 1) 经过仿真和实验证明,本文提出的自适应阈值检测算法相比固定阈值在低信噪比环境中具有更高的检测概率,并且保持了较低的虚警概率,拥有良好的恒虚警检测性能。
2) 该算法利用回波信号中噪声的频域统计特性经过带阻滤波后对多普勒信号进行自适应检测,具有运算简单、实用性强、便于工程实现等优点。
参考文献
| [1] | 范哲, 张春熹, 欧攀, 等. 车载三波束多普勒激光雷达波束配置研究[J].中国激光, 2014, 41(2): 309–314. FAN Z, ZHANG C X, OU P, et al. Research on beam pointing angle for three-beam Doppler vehicle lidar[J].Chinese Journal of Lasers, 2014, 41(2): 309–314.(in Chinese) |
| [2] | MARU K, WATANABE K. Non-mechanical scanning laser Doppler velocimetry with sensitivity to direction of transverse velocity component using optical serrodyne frequency shifting[J].Optics Communications, 2014, 319(9): 80–84. |
| [3] | QUI H, SOMMERFELD M, DURST F. Two novel Doppler signal detection methods for laser Doppler and phase Doppler anemometry[J].Measurement Science & Technology, 1998, 5(7): 769–778. |
| [4] | AYDIN N.DWT based adaptive threshold determination in embolic signal detection[C]//NASA/ESA Conference on Adaptive Hardware and Systems. Piscataway, NJ:IEEE Press, 2007:214-219. |
| [5] | GON?ALVES I B, LEIRIA A, MOURA M M. STFT or CWT for the detection of Doppler ultrasound embolic signals[J].International Journal for Numerical Methods in Biomedical Engineering, 2013, 29(9): 964–976.DOI:10.1002/cnm.v29.9 |
| [6] | MAALI A, MESLOUB A, DJEDDOU M, et al. Adaptive CA-CFAR threshold for non-coherent IR-UWB energy detector receivers[J].IEEE Communications Letters, 2010, 13(12): 959–961. |
| [7] | MATA-MOYA D, DEL-REY-MAESTRE N, JARABO-AMORES M P, et al.An adaptive threshold technique for the LR detector in K-clutter.Validation using IPIX radar[C]//Instrumentation and Measurement Technology Conference.Piscataway, NJ:IEEE Press, 2015:794-799. |
| [8] | AUBRY A, DE MAIO A, ORLANDO D, et al. Adaptive detection of point-like targets in the presence of homogeneous clutter and subspace interference[J].IEEE Signal Processing Letters, 2014, 21(7): 848–852.DOI:10.1109/LSP.2014.2309434 |
| [9] | XIAO Y, CUI G, YI W, et al. Adaptive detection and estimation for an unknown occurring interval signal in correlated Gaussian noise[J].Signal Processing, 2015, 108(2): 440–450. |
| [10] | AALO V A, PEPPAS K P, EFTHYMOGLOU G. Performance of CA-CFAR detectors in nonhomogeneous positive alpha-stable clutter[J].IEEE Transactions on Aerospace & Electronic Systems, 2015, 51(3): 2027–2038. |
| [11] | XU Y, YAN S, MA X, et al. Fuzzy soft decision CFAR detector for the K distribution data[J].IEEE Transactions on Aerospace & Electronic Systems, 2015, 51(4): 3001–3013. |
| [12] | 张晓永, 王勇, 陈锋. LFMCW激光雷达门限检测技术[J].四川兵工学报, 2012, 33(2): 120–122. ZHANG X Y, WANG Y, CHEN F. Threshold detection technology of ladar[J].Sichuan Ordnance Journal, 2012, 33(2): 120–122.(in Chinese) |
| [13] | 徐从安, 何友, 简涛, 等. 空域CFAR处理方法综述[J].海军航空工程学院学报, 2011, 26(4): 414–418. XU C A, HE Y, JIAN T, et al. Survey of space CFAR processing[J].Journal of Naval Aeronautical and Astonautical University, 2011, 26(4): 414–418.(in Chinese) |
| [14] | 何友, 关键, 孟祥伟, 等. 雷达自动检测和CFAR处理方法综述[J].系统工程与电子技术, 2001, 23(1): 9–14. HE Y, GUAN J, MENG X W, et al. Survey of automatic radar detection and CFAR processing[J].Systems Engineering and Electronics, 2001, 23(1): 9–14.(in Chinese) |
| [15] | 周健, 姚宝聚, 龙兴武. 激光多普勒信号渡越加宽研究[J].红外与激光工程, 2011, 40(5): 826–829. ZHOU J, YAO B J, LONG X W. Research on transit broading of laser Doppler signal[J].Infrared and Laser Engineering, 2011, 40(5): 826–829.(in Chinese) |
