全文HTML
--> --> -->近几年, 随着材料科学和电子科学的发展, 一些新型材料被发现能够直接模拟人脑中神经元和神经突触的计算能力, 如铁电材料[6]、阻变材料[7]、相变材料[8]和自旋电子材料[9]等. 这些新型器件打破了传统的冯诺依曼计算瓶颈, 具有存算一体, 功耗极低等优点, 能够实现生物神经元或者突触的神经态计算功能[10].
自旋电子材料作为制作新型神经形态器件的材料之一, 不但具备低功耗、高可靠性等优点, 而且容易制备, 成为学术界和产业界的重点关注对象. 2019年, Yue等[11]设计了一种基于磁畴壁运动的自旋忆阻器, 并与CMOS器件共同使用, 构建了一种脉冲神经网络, 实现了实时动态学习; Fukami等[12]利用36个自旋突触器件成功搭建了基于Hopfield模型的人工神经网络. 除自旋突触器件外, 自旋神经元器件也受到了广泛关注. 如基于磁畴壁运动的自旋神经元[13]、基于自旋矩纳米振荡器的自旋神经元[14]和基于随机翻转行为的自旋神经元等[15].
其中由于基于磁化随机翻转行为的自旋神经元器件具有与人脑神经元的随机性相似[16], 制备过程中具有较高的误差容忍度[17], 能够进一步降低功耗[18]等优点, 成为研究人员关注的重点. 日本Fukushima等[19]提出在自旋转移力矩(spin transfer torque, STT)和磁场作用下, 磁化能够发生随机翻转, 产生一系列随机信号; 美国Roy团队[18]提出基于自旋轨道力矩(spin oribit torque, SOT)的自旋神经元器件, 利用SOT驱动磁化翻转至空态, 撤去电流后, 磁化翻转至任一稳态, 实现了随机翻转. 相比利用STT驱动磁化翻转, 它的能耗更低, 集成度更高; Ostwal等[20]提出SOT和磁场相互作用下的自旋神经元器件并且成功模拟了神经元的激活特性. 可以看出目前自旋神经元激活方式基本采用的是电流驱动时钟, 耗能较大, 相比基于CMOS的神经元器件失去了能耗优势[18-20].
此外, 基于随机翻转特性的自旋神经元器件与逻辑器件已经成熟的制备工艺相似, 有望将自旋神经元用于实际应用中[9]. 但由于自旋器件结构性能对其计算功能会产生一定的影响[21,22], 因此需要从器件的结构尺寸及制作材料等方面出发, 筛选出性能相对更佳的器件. Kurenkov等[23]提出了一种反铁磁/铁磁异质结, 其利用SOT时钟调控磁化翻转, 通过调节器件尺寸实现了突触和神经元的关键性功能; 曾中明课题组[24]研究了不同结构的磁性隧道结(magnetic tunnel junction, MTJ)中磁畴壁钉扎作用的影响, 实现了多阻态变化的自旋突触器件; 游龙课题组[25,26]通过调控磁畴壁中固定层的状态, 利用SOT驱动Ta/CoFeB/MgO异质结中磁矩发生变化; 王开友课题组[27,28]提出利用层间交换偏置作用, 在所设计的材料体系中实现了无外部磁场辅助的电流诱导的确定性磁化翻转. 除此之外, 2019年, 该课题组[29]利用电流脉冲驱动方式成功模拟了突触尖峰放电时间依赖可塑性. 这些研究都是基于调控材料结构的方式来实现自旋神经态器件特性的, 关于材料选择方面的研究还较少, 而选择合适的器件材料将直接影响到器件的性能, 并且对自旋神经器件以及其神经网络计算能力的影响目前也还需要进一步探索.
基于此, 本文提出了一种磁场辅助磁弹应变的自旋神经元结构, 与前述的电流驱动的自旋神经元不同, 所设计器件引入了能耗较低的磁弹时钟[30,31], 实现了电压驱动的自旋神经元器件, 有效降低了能耗. 利用OOMMF (object oriented micromagnetic framework)微磁学仿真软件构建了器件的微磁学模型验证了所设计的自旋神经元的结构可行性. 随后构建了器件在热噪声环境下的数值模型, 仿真结果表明所设计的器件能够有效工作. 最后利用所提出的自旋神经元构建了三层神经网络用于识别手写数字, 验证了器件的神经网络计算能力. 除此之外, 本文研究了磁致伸缩层材料(Terfenol-D, FeGa, Ni)对基于随机磁化翻转特性的自旋神经元激活特性及其神经网络计算能力的影响.
2.1.磁场辅助磁弹应变驱动的神经元结构
本文设计的自旋神经元结构如图1所示. 主要分为3部分, 由下到上分别是硅基底、厚度为100 nm的压电层Pb[ZrxTi1–x]O3(PZT)[32]以及磁致伸缩层. 其中磁致伸缩层是尺寸为120 nm × 100 nm × 8 nm的椭圆形纳磁体. 如图1所示的笛卡尔坐标系, 红色箭头代表纳磁体磁化方向, θ是极角, 又称面外角, φ是方位角, 又称面内角.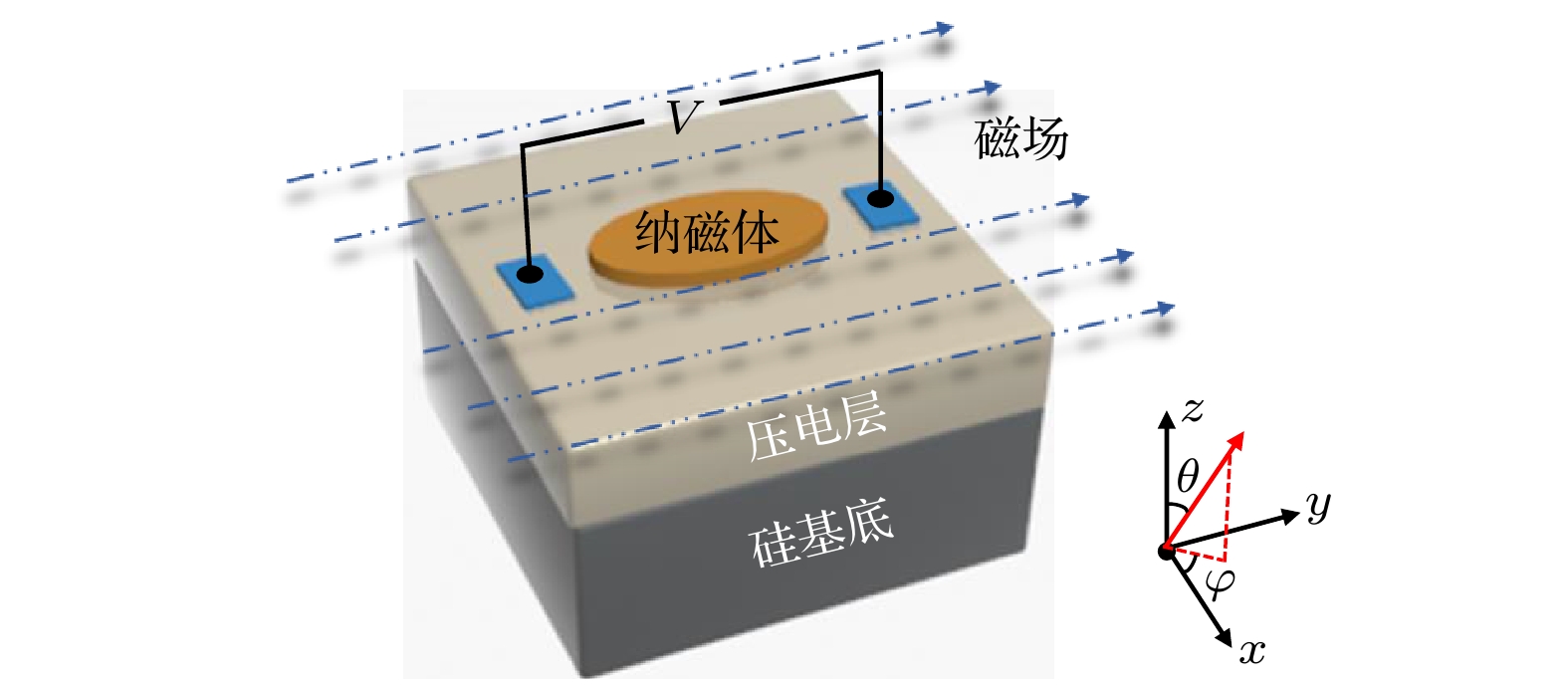 图 1 磁场辅助磁弹时钟神经元
图 1 磁场辅助磁弹时钟神经元Figure1. Magnetic field assisted strain-mediated neuron.
磁弹应变驱动纳磁体磁化状态改变的具体原理是: 当在PZT层上施加电压V时, 便会在层间形成电场. 因为PZT材料具有逆压电效应, 所以在电场的作用下会发生形变, 从而产生应力. 当PZT层上的形变传递到磁致伸缩层时, 由于磁致伸缩层具有逆磁致伸缩效应, 磁化状态会在应力的影响下发生改变. 具体过程是纳磁体磁化方向由稳定状态(y轴方向)转到不稳定状态(x轴方向), 即待写入状态.
定义纳磁体磁化方向沿y轴负方向代表数值“0”, 沿y轴正方向代表数值“1”[33], 设该自旋神经元结构中纳磁体初始磁化方向沿y轴负方向, 如图2所示. 由于实现信息传递, 纳磁体必须完成0—1转换. 但磁弹应变只能令磁化翻转90°, 无法实现0—1转换. 因此, 在利用磁弹应变将磁化翻转90°后, 需要施加一定的弱磁场, 推动纳磁体磁化完成180°翻转.
 图 2 磁化翻转原理图
图 2 磁化翻转原理图Figure2. Schematic of magnetization switching.
但是磁化翻转行为是随机的, 会出现0°翻转和180°翻转. 0°翻转是指最终磁化方向和初始磁化方向相同, 180°翻转是指最终磁化方向和初始磁化方向相反. 设施加磁场方向向上, 如图2中红色箭头所示, 则0°翻转的概率为P1, 180°翻转的概率为P2. 这种随机翻转行为已经被证实能够模拟生物神经元的随机性行为[34], 因此提出了磁场辅助磁弹应变驱动的自旋神经元.
2
2.2.磁化动力学模拟
32.2.1.器件的微磁学模型及仿真验证
为了证明本文设计自旋神经元结构的可行性, 利用OOMMF微磁学仿真软件建立器件的微磁学模型. 其中磁致伸缩材料选用Terfenol-D, 各项参数[35-37]如表1所示.| 参数 | Terfenol-D | FeGa | Ni |
| 杨氏模量Y/(1010 Pa) | 8.0 | 2.5 | 21.4 |
| 磁致伸缩系数λs/10–4 | 6.0 | 4.0 | –0.2 |
| 吉尔伯特阻尼系数α | 0.100 | 0.100 | 0.045 |
| 回磁比γ/(105 rad·s–1·T–1) | 2.21 | 2.21 | 2.21 |
| 饱和磁化率Ms/(105 A·m–1) | 8.00 | 13.20 | 4.84 |
| 交换作用常数A/(10–11 J·m–1) | 0.90 | 1.60 | 1.05 |
表1材料参数表
Table1.Parameters of different materials.
图3展示了纳磁体在应力和磁场共同作用下的磁化过程. 该过程主要分为3个阶段, 第1阶段是在0 ns时, 纳磁体在30 MPa的应力作用下, 磁化方向由初始方向翻转90°至x轴负方向, 到达空态. 第2阶段是在1 ns时, 撤去应力, 施加10 mT磁场, 将继续翻转. 若磁场方向与初始磁化方向一致, 磁化向下翻转回到初态; 若方向相反, 磁化向上翻转达到另一稳态. 第3阶段是2 ns后, 撤去磁场, 纳磁体将始终位于稳定状态. 由于OOMMF软件仿真没有考虑热噪声的影响, 因此无法体现出该自旋神经元结构纳磁体随机翻转的特性. 但是通过施加不同方向的磁场, 对动态磁化过程图进行分析研究后, 发现纳磁体可以在磁场和应力共同作用下完成翻转.
 图 3 动态磁化过程 (a) 磁化初始方向为–y; (b) 施加30 MPa应力, 磁化翻转90°; 撤去应力, 施加10 mT磁场; (c)方向相反, 磁化翻转180°; (d)方向相同, 磁化翻转0°
图 3 动态磁化过程 (a) 磁化初始方向为–y; (b) 施加30 MPa应力, 磁化翻转90°; 撤去应力, 施加10 mT磁场; (c)方向相反, 磁化翻转180°; (d)方向相同, 磁化翻转0°Figure3. Magnetization process: (a) Initial direction of magnetization is –y; (b) a 30 MPa strain is applied and then 90° switching is achieved, removing strain and applying a 10 mT magnetic field; (c) 180° magnetization switching; (d) 0° magnetization switching.
通过OOMMF仿真, 还获得了该自旋神经元结构的磁化矢量变化曲线, 如图4所示. 结合纳磁体磁化矢量的参数表达式, 见(5)—(7)式, 可以对磁化过程做进一步分析. 由于x与y方向上的磁化矢量mx, my与方位角φ的大小有关, 因此其值随方位角的改变在不断发生变化. 0 ns时, 纳磁体磁化翻转至空态, 此时my由–1变化到0. 1 ns时, 纳磁体在只有磁场的作用下发生翻转. 当磁场方向沿y轴正方向, my从0变化到+1; 当磁场方向沿y轴负方向, my则由0变化至–1. mx与my的变化过程正交.
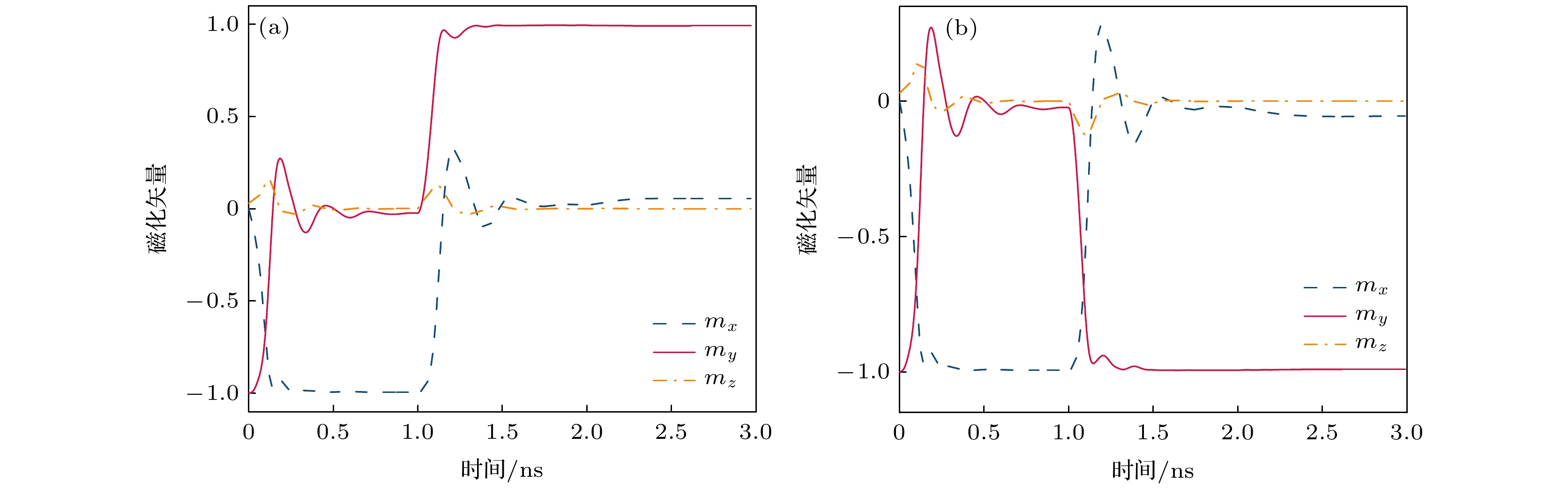 图 4 磁化矢量随时间变化曲线图 (a) 1 ns时, 施加磁场沿y轴正方向时的磁化矢量变化图; (b) 1 ns时, 施加磁场沿y轴负方向的磁化矢量变化图
图 4 磁化矢量随时间变化曲线图 (a) 1 ns时, 施加磁场沿y轴正方向时的磁化矢量变化图; (b) 1 ns时, 施加磁场沿y轴负方向的磁化矢量变化图Figure4. Magnetization vector with time: (a) When t = 1 ns, a magnetic field is applied in the direction along +y; (b) when t = 1 ns, a magnetic field is applied in the direction along –y.
3
2.2.2.室温下器件的数值模型仿真
由于微磁学仿真没有考虑热噪声的影响, 因此还需建立该器件在热噪声影响下工作的数值模型, 从而验证该结构的实际工作效能.磁场辅助磁弹应变作用到纳磁体上, 其磁化方向随时间变化的过程可以用LLG(Landau-Lifshitz-Gilbert)方程来描述[38]:



将各表达式和材料相关参数, 代入磁化标量方程(2)—(4)后, 利用经典四阶Runge-Kutta算法求解, 即可得到磁化状态的动态改变情况. 其中材料参数如表1所示.
选取Terfenol-D作为磁致伸缩层材料, 利用MATLAB软件, 对该结构数值模型进行仿真. 整个仿真过程为前3 ns施加40 MPa的应力, 3—6 ns间撤去应力, 施加10 mT的磁场, 方向沿y轴正方向, 6 ns后将磁场也撤去. 仿真后得到该结构随机磁化翻转的动态过程, 如图5所示. 图5(a)展示了纳磁体完成180°磁化翻转的过程, 图5(b)是纳磁体没有完成180°翻转, 回到初始状态. 这一过程说明本文设计的自旋神经元结构在常温下能够实现随机翻转, 进一步验证了该器件结构的正确性.
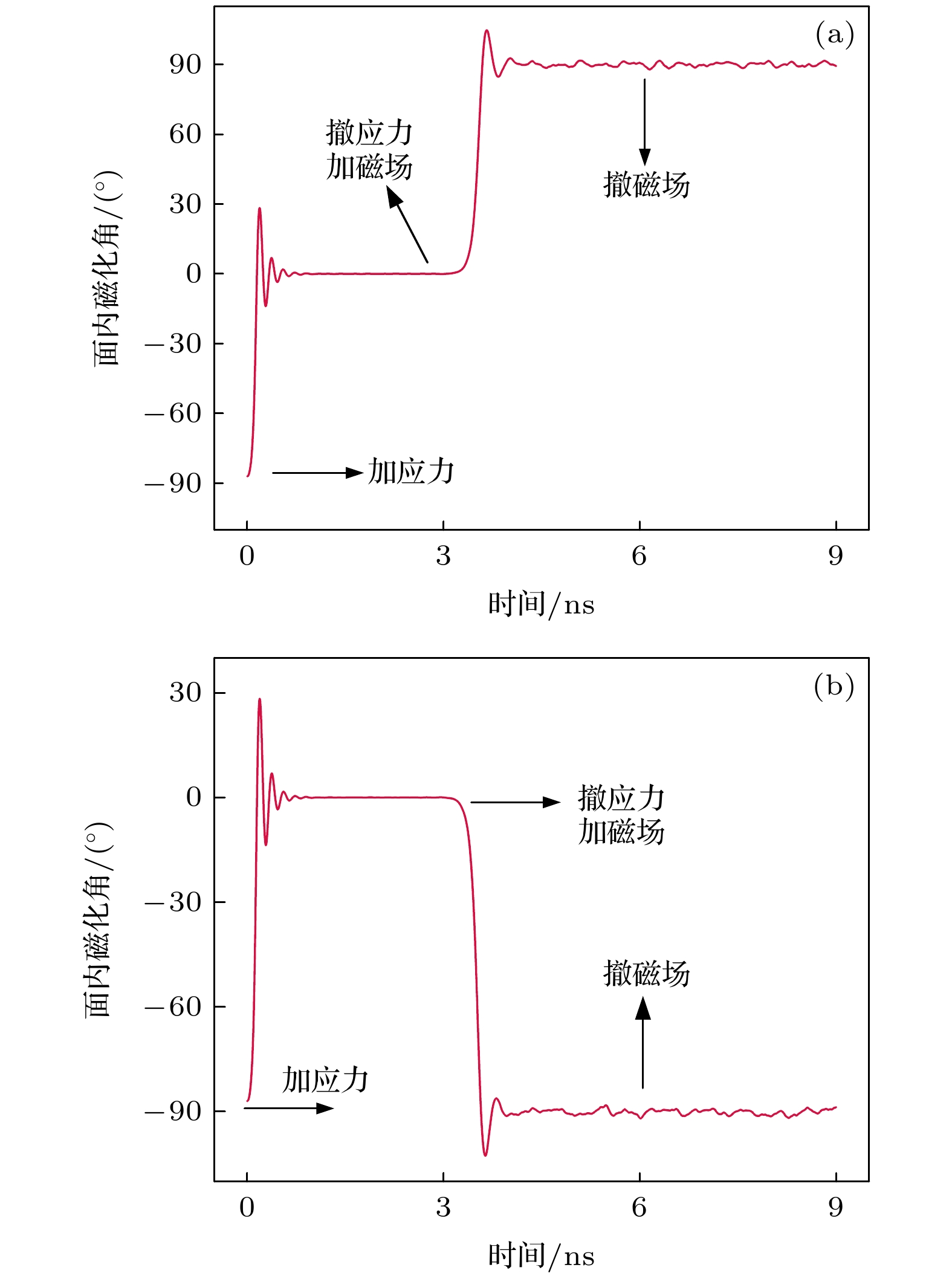 图 5 室温下随机磁化翻转的动态磁化过程 (a) 180°磁化翻转; (b) 0°磁化翻转
图 5 室温下随机磁化翻转的动态磁化过程 (a) 180°磁化翻转; (b) 0°磁化翻转Figure5. Magnetization dynamics at room temperature: (a) 180° magnetization switching; (b) 0° magnetization switching.
3.1.不同材料自旋神经元的激活特性曲线
自旋神经元的翻转概率与输入量之间存在一定的输入输出关系, 为了获得本文神经元结构的180°翻转概率与输入磁场之间的关系, 以Terfenol-D自旋神经元为例展开研究. 首先施加40 MPa应力, 然后在0—50 mT之间随机选取20个不同的磁场值输入, 并计算这20个输入磁场下纳磁体180°磁化翻转概率, 如图6(a)中绿点所示, 而施加负磁场时的180°翻转概率可利用纳磁体的对称性分析得出[35]. 即施加大小相同、方向相反的磁场, 实现180°翻转的概率之和为1. 若已知施加正磁场时的180°翻转概率P2, 则施加负磁场时的180°翻转概率为1–P2. 由于该翻转概率函数可以用Sigmoid函数y = 1/[1 + exp(–αx)]来拟合[9], 并且当α = 0.13时, 图6(a)中橙色的拟合函数曲线与翻转概率数据拟合程度最高. 因此, 所得拟合函数y = 1/[1 + exp(–0.13x)]便是Terfenol-D神经元器件的激活函数. 通过分析, 当输入磁场增大时, 纳磁体180°翻转概率也随之增大; 当输入磁场达到约20 mT时, 概率接近饱和.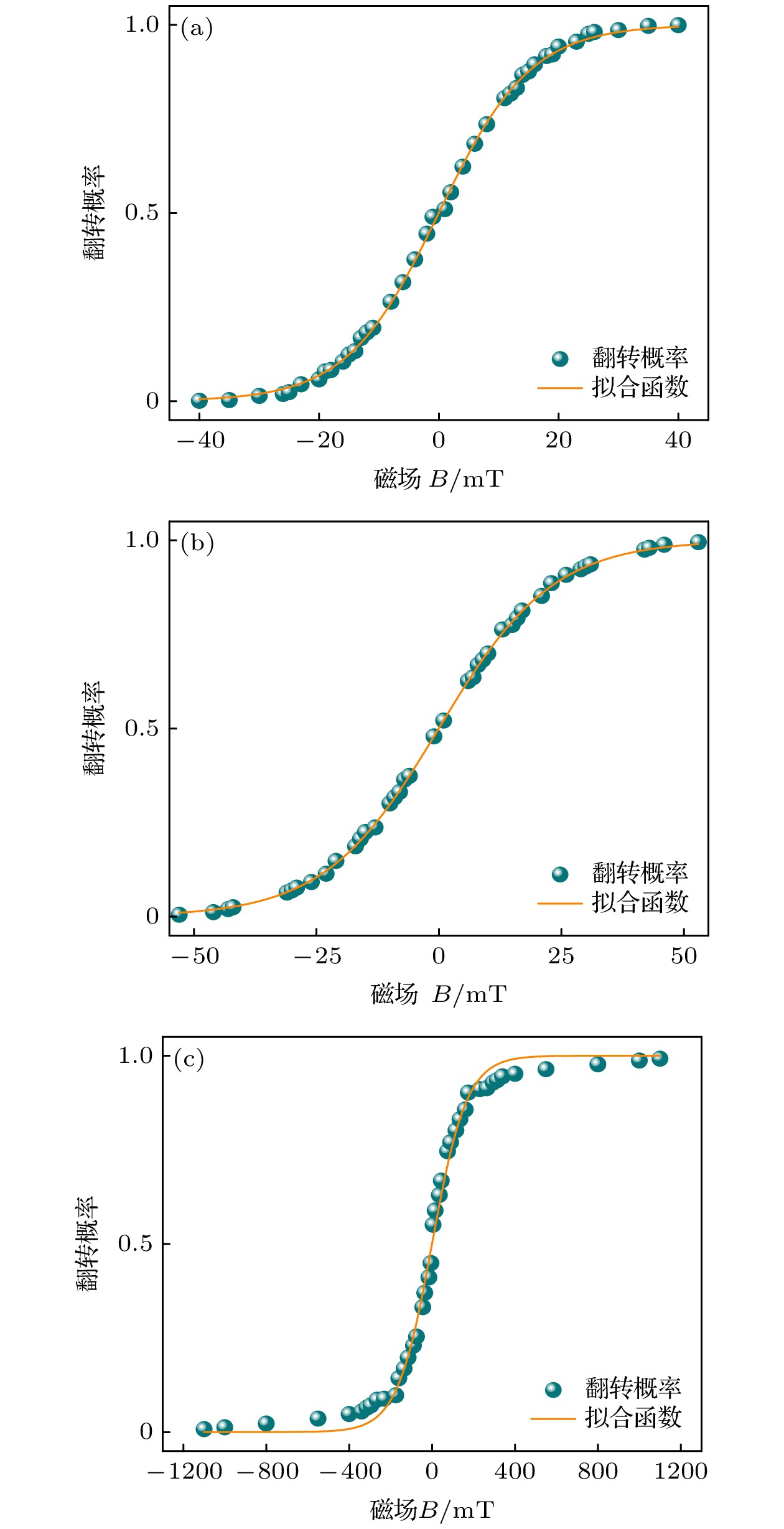 图 6 180°磁化翻转概率与输入磁场的关系, 磁致伸缩层材料为(a) Terfenol-D, (b) FeGa, (c) Ni
图 6 180°磁化翻转概率与输入磁场的关系, 磁致伸缩层材料为(a) Terfenol-D, (b) FeGa, (c) NiFigure6. 180° magnetization switching probability versus magnetic field, the magnetostrictive layer material is (a) Terfenol-D, (b) FeGa, (c) Ni.
利用这种方式, 对不同磁致伸缩材料下自旋神经元的激活特性进行进一步研究. 将Terfenol-D换成同样具有磁致伸缩效应的FeGa和Ni. 当磁致伸缩材料为FeGa时, 保持其他条件不变, 施加应力50 MPa, 磁场从0到60 mT之间选取20组数据, 可以得到Sigmoid关系式y = 1/[1 + exp(–0.09x)], 如图6(b)所示. 当输入磁场为30 mT时, 翻转概率接近饱和. 当磁致伸缩层材料为Ni时, 仍然保持其他条件不变, 施加大小为90 MPa的应力, 磁场由0到1200 mT之间选取20个值, 得到拟合函数关系式为y = 1/[1 + exp(–0.012x)], 如图6(c)所示. 当输入磁场为175 mT时, 概率接近饱和.
上述研究中, 不同磁致伸缩材料的自旋神经元需要施加的应力不同, 这由(14)式决定[35]:
2
3.2.材料对自旋神经元计算功能的影响分析
本文利用Liyanagedera等[40]设计的神经元读取电路, 将纳磁体磁化翻转概率转化为确定性输出电压值读出. 具体过程为: 首先将本文设计的器件结构作为MTJ的自由层, 当磁场辅助磁弹应变驱动纳磁体磁化随机翻转时, MTJ会在高电阻和低电阻两个状态间跳变. 然后给MTJ施加恒定电流, 则其两端的电压值将随电阻的变化而变化. 在一定时间内对输出电压值求平均, 则MTJ的平均输出电压将和纳磁体180°磁化翻转概率一致, 于是平均输出电压和输入磁场大小之间的关系与图6中S型激活函数相同. 将平均输出电压先转换为电流, 再转换为磁场, 可以继续施加到下一层神经元中[20], 实现神经元间的信息传递.设计如图7所示的人工神经网络识别MNIST (mixed national institute of standards and technology database)手写数字数据集, 以进一步研究材料对自旋神经元神经形态计算能力的影响. MNIST数据集中每个数字图片为28 × 28像素, 共784个像素点, 因此设置神经网络输入层为784个节点. 隐藏层设为300个节点. 输出层设置为10个节点, 分别对应0到9十个数字. 由于手写数字图片像素是介于0—255之间的灰度值, 因此为了将图像输入到神经元中, 需要将灰度值0—255线性转换为文中图6所示的神经元激活函数非线性区域对应的输入磁场范围. 这里只考虑输入正磁场的情况. 由图6知, Terfenol-D, FeGa和Ni对应的输入磁场范围分别是0—20 mT, 0—30 mT和0—175 mT. 传统的Sigmoid函数y = 1/[1 + exp(–x)]也采用了同样的设置, 取其非线性区域对应的数值范围(0 < x < 5)输入. 设置神经网络训练次数为300, 可得到如图8所示的识别精度图. 由图8分析知, 对于Terfenol-D, FeGa和Ni这3种材料组成的自旋神经元, 当训练次数分别为36, 57和61次时, 神经网络达到饱和识别率98%, 传统Sigmoid神经元在215次时达到饱和识别精度98%. 可以看出, 在神经网络训练初期, 本文设计的自旋神经元构成的神经网络的图像识别精度比传统的Sigmoid人工神经元高. 这是由于在神经网络计算前对输入磁场进行了一次线性转换, 这种方式有利于提高神经网络的识别速度, 并且更快地达到饱和识别率[41]. 结果表明本文设计的自旋神经元器件搭建的神经网络能够实现与传统Sigmoid神经元器件相同的识别能力.
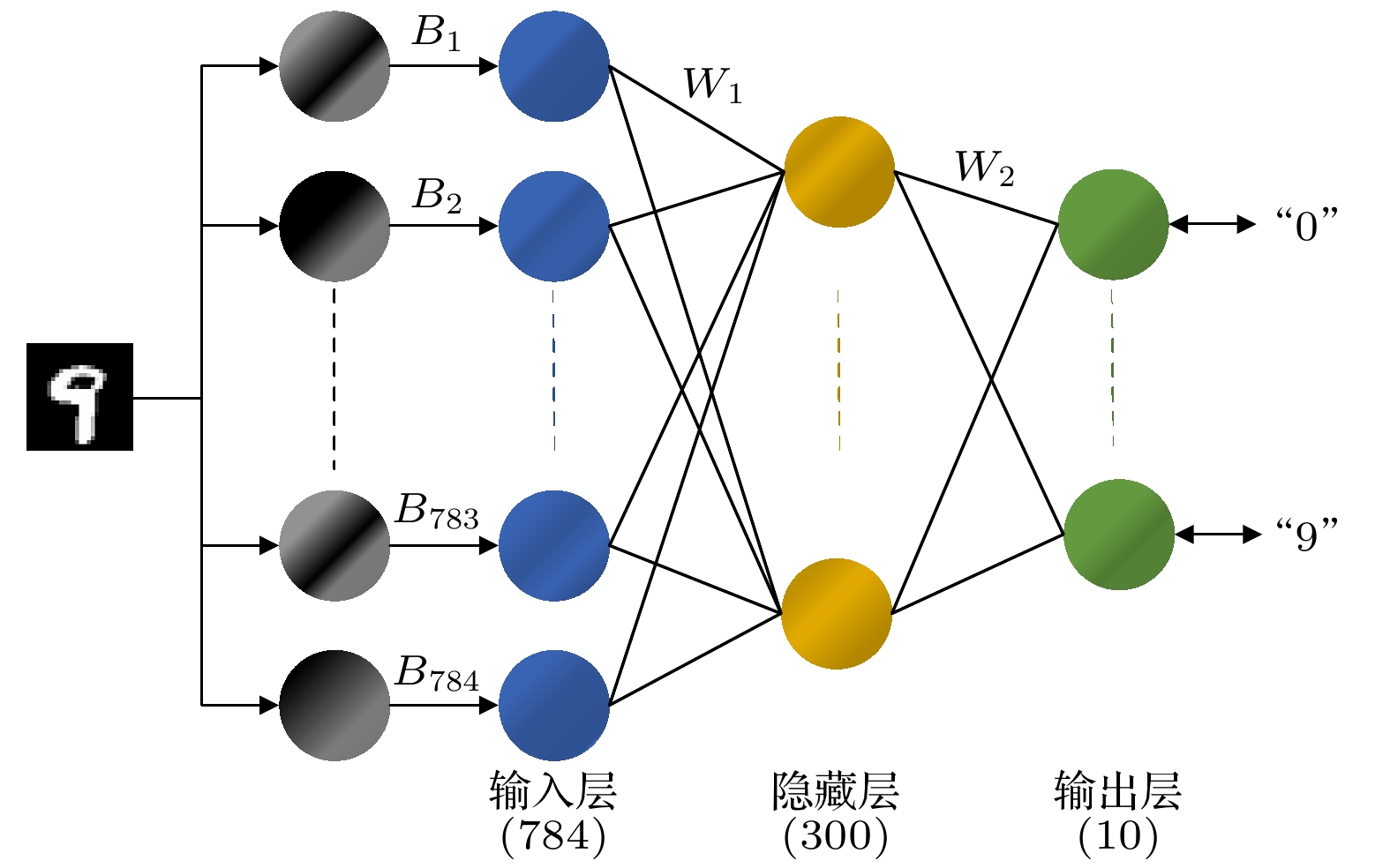 图 7 基于磁场辅助磁弹时钟的自旋神经元的三层神经网络结构示意图
图 7 基于磁场辅助磁弹时钟的自旋神经元的三层神经网络结构示意图Figure7. Three-layer neural network based on magnetic field + strain spin neurons.
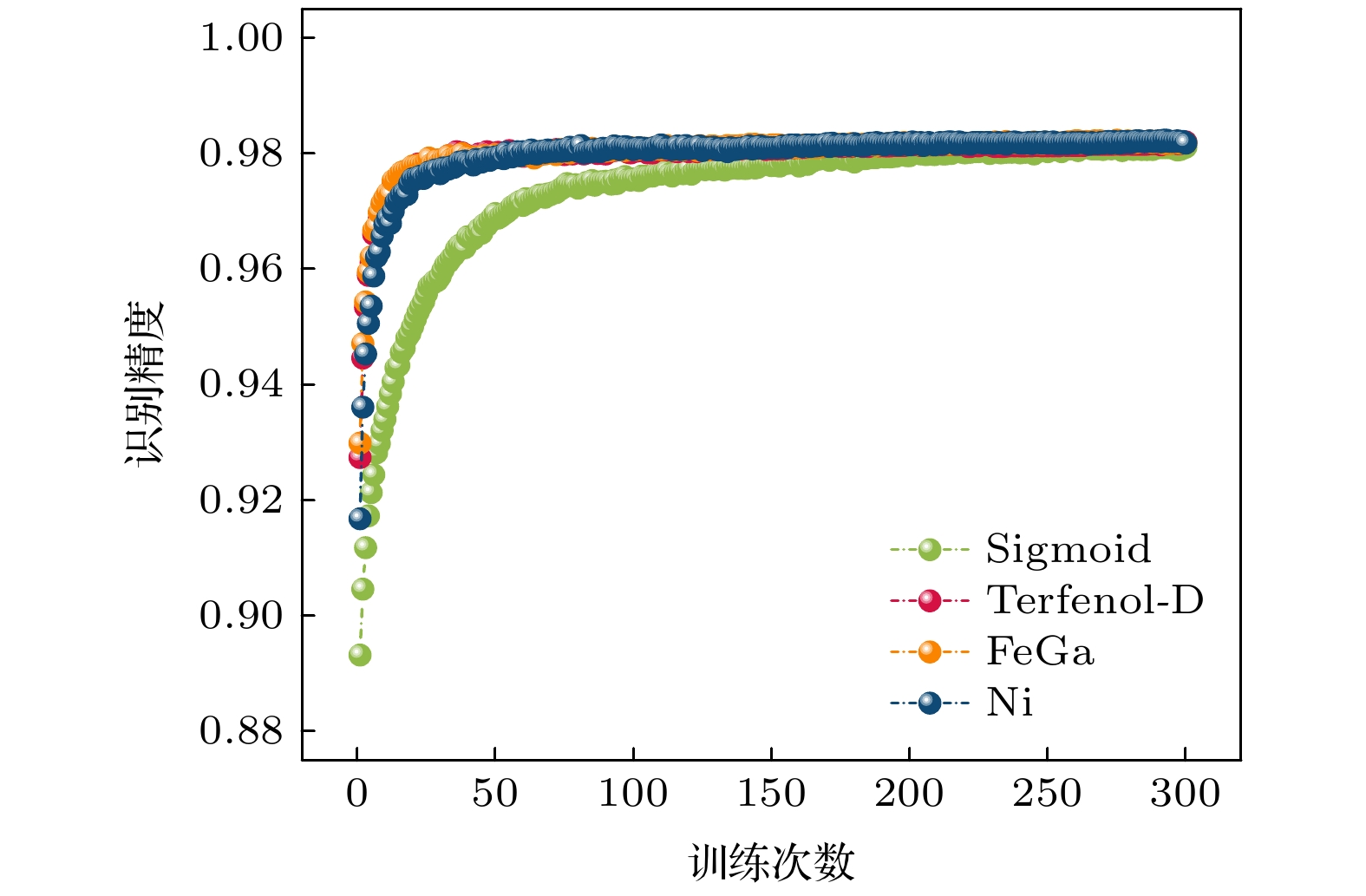 图 8 不同材料神经元器件的识别精度
图 8 不同材料神经元器件的识别精度Figure8. Recognition rate obtained from the neural network with different materials.
除此之外, 该自旋神经元结构由于引入了低能耗的磁弹应变时钟, 理论上相比其他电流驱动的神经元结构具有能耗优势. 具体计算过程是: 该神经元结构功耗主要来源于磁场和磁弹应变时钟的能量损耗. 其中磁弹应变时钟的能量损耗Estrain的计算公式为[42]
通过(18)式可估算得出Terfenol-D, FeGa和Ni多铁神经元的能耗分别为1.67 pJ, 3.75 pJ和12.75 nJ, 而利用电流驱动的自旋神经元器件功耗[20]比Terfenol-D和FeGa多铁神经元的能耗高了近3个数量级. 这是由材料的磁致伸缩系数决定的, 由表1知, Terfenol-D磁致伸缩系数是FeGa的1.5倍, 是Ni磁致伸缩系数的30倍, 其中Terfenol-D的磁致伸缩系数最小, 因此其功耗最低. 所以, 当该器件结构选择合适的磁致伸缩层材料时, 能够大幅度降低功耗.
上文讨论了输入不同范围的磁场使得3种材料都达到饱和识别精度的情况, 接下来研究当输入磁场范围相同时, 3种材料的神经网络计算能力. 设低功耗输入时的磁场范围为0—20 mT, 神经网络训练次数设为2000次, 训练完毕后, 可得如图9所示的3种材料的识别率对比图. 从图中可以看出, 三种材料的自旋神经元都能达到饱和识别精度98%. 但Terfenol-D和FeGa神经元的识别速度明显高于Ni的识别速度. 这是由于Terfenol-D, FeGa和Ni激活函数非线性区域对应的磁场范围为0—20 mT, 0—30 mT和0—175 mT, 当输入磁场范围为0—20 mT时, 对应Ni激活函数的非线性区域太小, 导致其并非标准的非线性区域. 因此低功耗输入时, Ni的识别速度不如Terfenol-D和FeGa.
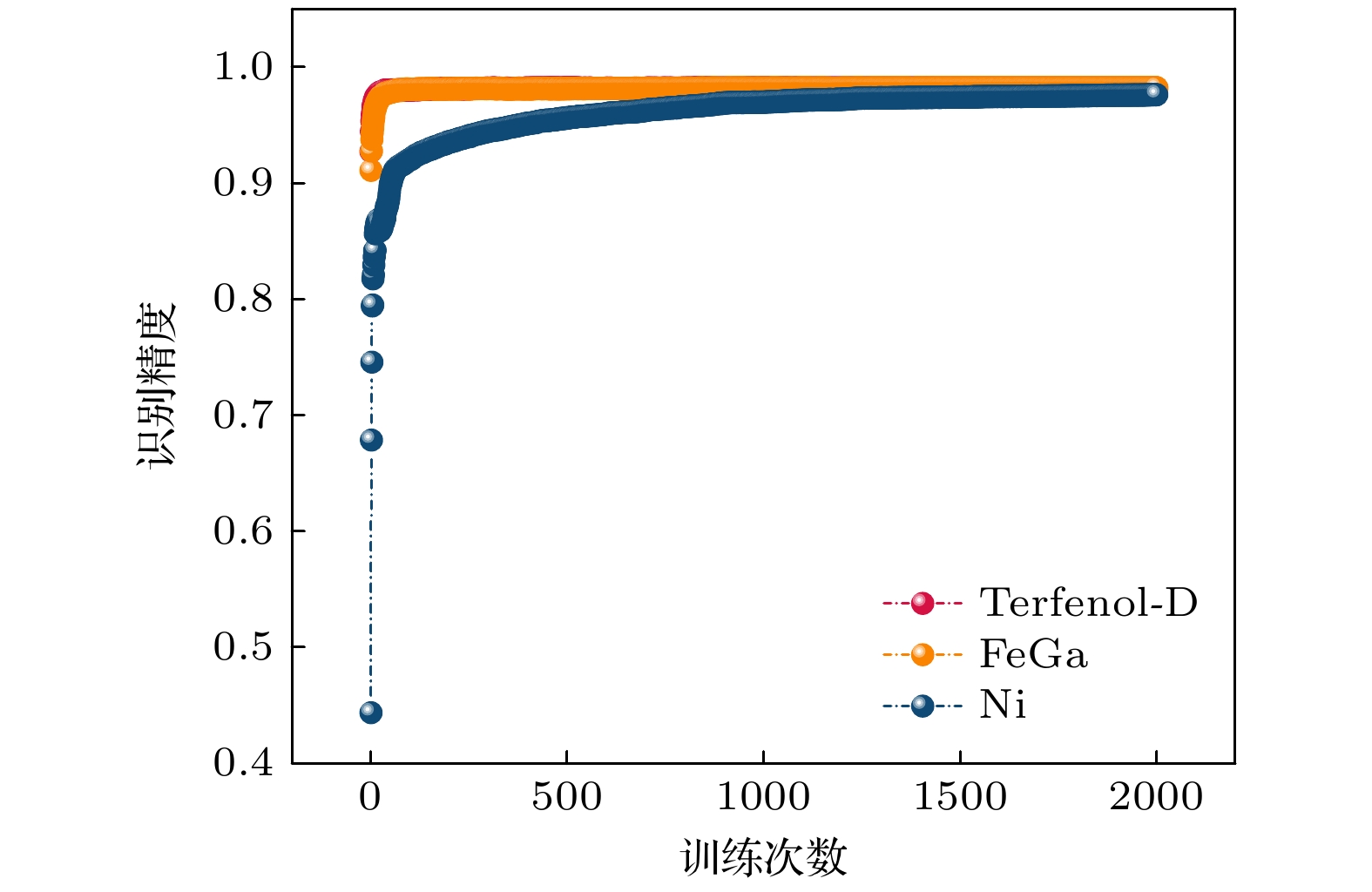 图 9 输入磁场为0—15 mT时, 不同材料神经元器件的识别精度
图 9 输入磁场为0—15 mT时, 不同材料神经元器件的识别精度Figure9. When the magnetic field is 0–15 mT, the recognition rate obtained from the neural network with different materials.
通过上述对比研究, 可以得到当输入不同范围的磁场使得Terfenol-D, FeGa和Ni都达到饱和识别精度时, Terfenol-D自旋神经元的功耗相比FeGa和Ni较低; 当低功耗输入相同的磁场时, Terfenol-D材料相识别速度较快. 因此Terfenol-D更适合作为该自旋神经元的磁致伸缩层材料. 这也为今后选择多铁神经元材料提供了参考标准, 即选择磁致伸缩系数较大的材料更利于进行神经网络计算.
