全文HTML
--> --> -->无论作造影剂还是辅助治疗, MMB在可变压力场作用下的动力学不仅是其诊疗应用的基础, 也是进行功能优化结构设计及拓展应用的前提. MMB生产制备中, MB膜层与SPIOs的结合一般通过静电吸附、化学键连或物理镶嵌等方式, 不同结合方式形成的包膜结构和物理特性不同. Sciallero等[10]对SPIOs与外壳共价连接及被束缚在外壳中两类MMB的声特性进行了实验表征, 认为两者都是有效的超声造影剂, 但壳结构对成像过程中的回声强度和探测灵敏度有明显影响. Gu等[11]对MMB的谐波响应和空化活性进行了实验研究, 发现SonoVue微泡的稳定空化阈值和惯性空化阈值与SPIOs浓度为某一定值时的MMB测量值相似, 表明欲提高MMB的诊疗性能, 需对其壳层如厚度及颗粒体积分数等进行合理设计. Marlies等[12]在对MMB的声压阈值测试中, 发现其共振曲线随声压增大明显倾斜, 非线性振动特性增强. 这些实验从不同程度上有助于认识MMB的声特性, 但MMB作为一种新型造影剂, 在超声成像和药物输送中的动态特性尤其是非线性振动行为仍缺乏全面的了解.
为更好地了解MMB的声响应特性及SPIOs的影响, Mulvana等[13]利用数值方法在洞察微泡动力学机制方面的优势, 如可提供详细、非破坏性且高效的在体或离体很难观察到的力学过程[14-16], 假设MMB膜层为均匀分布有球形磁性纳米颗粒的疏水性黏性流体, 在Church[17]模型基础上, 发展了较为简单的磁性单层膜微泡动力学理论模型, 分析了MMB在声场中的体振荡特性, 认为SPIOs主要影响微泡的谐波响应. 然而, Mulvana等在发展MMB模型过程中, 仅考虑颗粒介入引起的包膜材料密度的变化. 按照磁流体理论, SPIOs不仅改变磁流体密度, 同时还改变了磁流体的黏度及弹性. 膜结构和特性是影响泡动力学的关键, 随制备技术的发展MMB出现多种结构, 常见的有SPIOs分散在内壳油层内、嵌入在脂质膜层壳上及非共价结合在微泡外表面等[18], 因此发展能够更为适当地描述多层膜结构MMB声响应的数学模型, 通过理论方法探讨颗粒的存在对微泡振荡的影响, MMB在超声作用下的运动以及其与普通MB是否存在显著差异等问题不仅有趣且极为重要.
MMB的另一个重要特性就是因SPIOs的存在具有磁性及磁场响应. 磁声场同时存在时, 因多场叠加及耦合作用使MMB行为极为复杂化, 为使问题简化Malvar等[19]采取磁流体力学方法, 将泡的磁场响应问题转化为磁流体中气泡动力学来研究, 发现足够强的磁场对气泡振动有一定抑制作用. Mo等[20]也发现在相同驱动声场作用下, 磁场对水中泡的振动影响很小.因此研究泡的径向振动特性时可暂时不考虑磁性以及磁场的影响.
本文目的是在不考虑外磁场条件下, 构建具有双层膜结构的MMB动力学理论模型, 通过数值方法研究其声响应及SPIOs含量对泡的动力学的影响. 在考虑MMB基本结构基础上, 建立图1所示双层膜模型, 同时考虑磁性颗粒对流体膜层密度和黏度的影响, 构建双层膜磁性微泡动力学方程. 使用微扰法对磁性微泡的动力学方程进行一阶线性化, 并用数值方法分析驱动声场参数、SPIOs体积分数、表面张力和膜层厚度等对MMB振动非线性的影响.
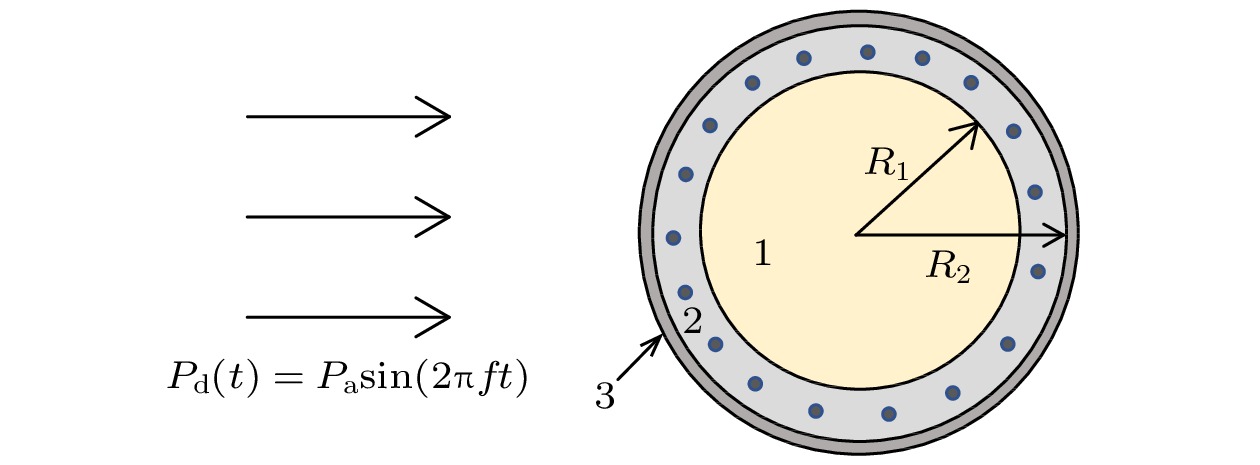 图 1 磁性微泡几何模型. 1-空气, 2-磁流体层, 3-磷脂薄层
图 1 磁性微泡几何模型. 1-空气, 2-磁流体层, 3-磷脂薄层Figure1. The geometric model of MMBs. 1-air, 2-magnetic fluid, 3-thin layer of phospholipid regardless of thickness.
设磁流体膜层厚度



考虑连续介质动力学方程为[23]
对于不可压缩黏性流体, 其黏性应力张量满足如下关系[24]:

结合边界条件, 对(7)式从R1到∞积分得:
于是, MMB动力学方程可表示为


从(15)式和(17)式可看出, 在周期性外声场驱动下的磁性微泡, 其振动特性不仅受声场参数包括声压幅值Pa和驱动频率f的影响, 还与微泡本身参数有关, 包括微泡初始半径R20、包膜层上磁性颗粒的体积分数和膜层材料等. 由ω0表达式可以看出, 初始半径相同的磁性微泡, α引起的膜层密度及黏度变化、K值及膜层厚度d共同决定磁性泡的固有频率. 磁性颗粒的结合增大了膜的密度和黏度, 因而导致磁性微泡的共振频率下降. 同时, 磁性微泡膜壳黏弹性一定程度增加了振动阻尼, 也会对磁性泡振动系统特性产生影响, 所以有必要去分析声场条件及微泡自身参数对微泡振动的影响.
2
3.1.声场参数响应
超声诊疗应用中驱动声压是重要控制参数之一. 通过MMB在大范围声压幅值内所表现出的混沌运动及非线性运动以及所引起的谐波成分, 能更多更全面了解其声响应特性. 控制MMB基本结构参数d = 100 nm, α = 0.1, K = 0.3 N/m保持不变, 分析驱动声压幅值从0—500 kPa连续变化, R20 = 5 μm (f0 = 0.85 MHz)微泡分别在 f0/2, f0, 2f0声频激励下, 微泡R2/R20随驱动压Pa变化规律, 结果见图2(a)—(c). 随着驱动压幅值增加, 微泡振动由周期1过渡到周期2、再进入周期4, 随后进入混沌, 也就是说微泡经由倍周期分岔发展为混沌运动. 对比图2(a)、图2(b)及图2(c)发现, 倍周期分岔所对应的临界声压随驱动声频率变化有所不同, f = f0时最大而f = 2f0时最小. 另外, f = f0/2时声压阈值介于f = f0和f = 2f0两者之间, 但此时微泡混沌响应最为强烈且在混沌区域微泡振幅急剧增大.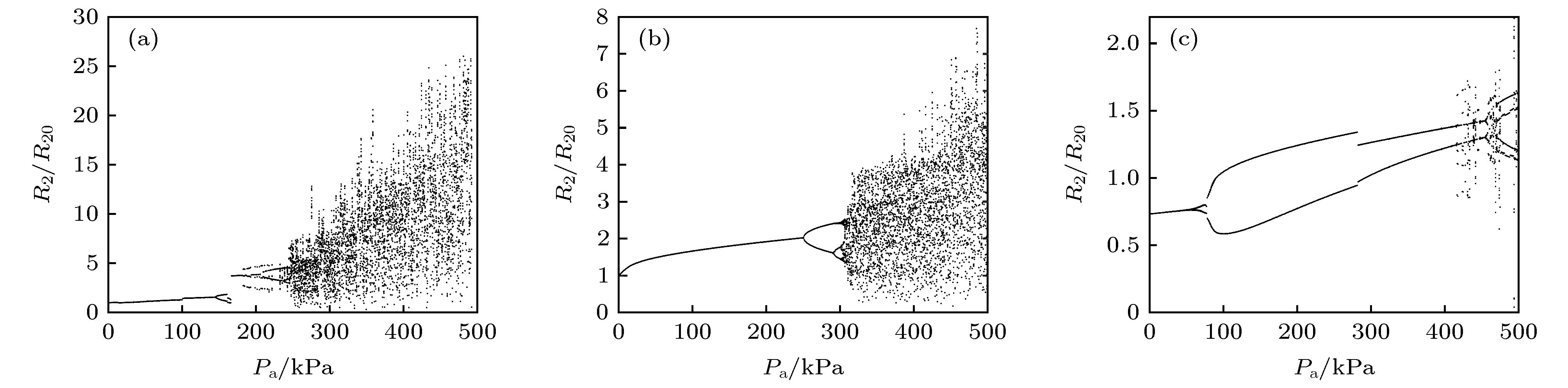 图 2 声压响应分岔图 (R20 = 5 μm) (a) f = f0/2; (b) f = f0; (c) f = 2f0
图 2 声压响应分岔图 (R20 = 5 μm) (a) f = f0/2; (b) f = f0; (c) f = 2f0Figure2. Bifurcation diagram of an MMB with pressure amplitude for R20 =5 μm: (a) f = f0/2; (b) f = f0; (c) f = 2f0.
微泡作为一个非线性受迫振动系统, 当驱动声压连续变化到某个临界值时系统出现分岔, 振动图出现分岔意味着系统全局性态突变、展示出非线性特性, 该临界声压可能与磁性微泡的空化阈值相关.f = f0时稳定振荡区域最宽, f = f0/2更容易发生混沌, f = 2f0发生振动失稳临界声压最低但混沌临界压最大, 普通微泡在2f0驱动下具有最小的次谐波阈值的结论已得证实[25], 可见磁性微泡有与一般包膜泡相似的声压响应规律.
对任意一个非线性振动系统, 超谐波响应总是或多或少存在, 而次谐波行为仅在驱动压超过某阈值时才存在, 因此次谐波分量出现被认为空化发生的重要标志[11], 为此, 通过功率谱和庞加莱截面分析上述微泡在共振激励下的运动细节, 当Pa分别取100, 255和350 kPa时结果分别对应图3(a)—(c)和图3(d)—(f).对比功率谱发现, 从开始仅有f0和2f0两个分立谱(图3(a)), 到Pa = 255 kPa时除了f0和2f0又增添了f0/2及其他谐波成分(图3(b)), 最后Pa = 350 kPa时又出现新的f0/5, 2f0/5等多个分谐波成分(图3(c)). 随着驱动压增大分谐波成分增多, 对应庞加莱截面图上的离散点也从1到2再到有限个点集. 功率谱图和庞加莱截面联合判定, 微泡从开始的稳定周期振荡到不稳定周期振荡、最后进入到混沌运动. Pa = 255 kPa时f0/2的出现表明此时可能发生不稳定空化; 随着声压的继续增大、更多无规律分布的频率成分出现, 在庞加莱截面表现为一定层次结构有限点密集分布, 运动呈现混沌特性. Sciallero等[10]实验表明: MMB线性振荡区间为50—100 kPa, 非线性区域为120—450 kPa, 与本文理论预测结果一致.微泡诊疗应用中可根据需求设置声参数, 实现在输运过程中微泡处于稳态振动以辅助超声诊断, 或在微泡到达目标位置后调节驱动声波压力促使微泡处于混沌态促进载药体释放或治疗.
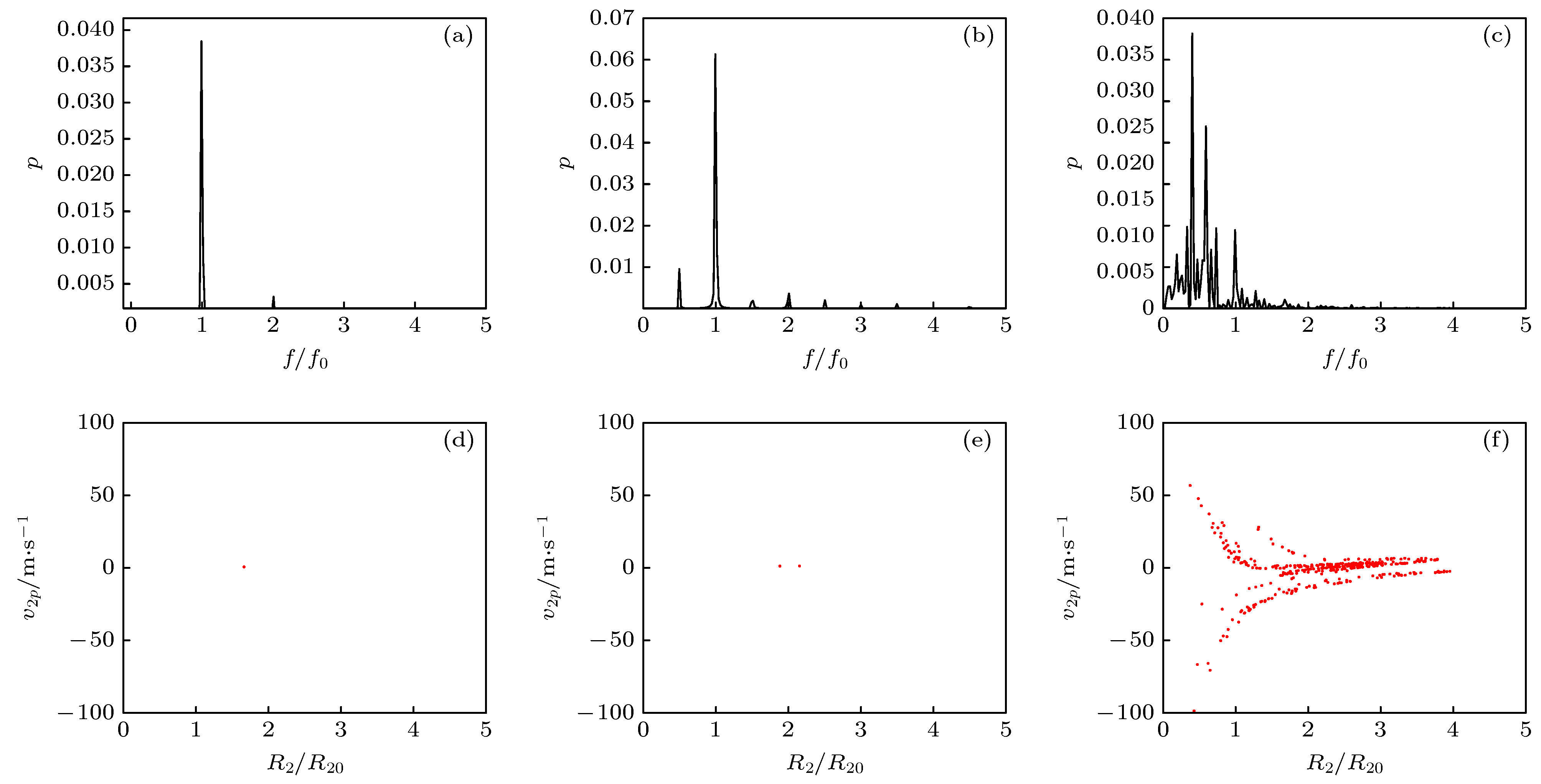 图 3 基频激励时MMB频谱图 ((a)—(c))和庞加莱截面图((d)—(f)) (R20 = 5 μm) (a), (d) Pa = 100 kPa; (b), (e) Pa = 255 kPa; (c), (f) Pa = 350 kPa
图 3 基频激励时MMB频谱图 ((a)—(c))和庞加莱截面图((d)—(f)) (R20 = 5 μm) (a), (d) Pa = 100 kPa; (b), (e) Pa = 255 kPa; (c), (f) Pa = 350 kPaFigure3. Spectra diagram and Poincaré cross-section of an MMB at f = f0 (R20 = 5 μm): (a), (d) Pa = 100 kPa; (b), (e) Pa =255 kPa; (c), (f) Pa = 350 kPa
微泡大小是其诊疗应用的关键参数之一.驱动压一定且Pa = 150 kPa时, 初始半径分别为3, 4及5 μm磁性微泡(其本征频率依次为1.60, 1.11及0.85 MHz)频响曲线见图4(a)—(c).在低于微泡共振频率的低频区存在不稳定频响区, 此时驱动声波频率的微小变化将引起R2/R20的跳跃, 跳跃的幅度一定程度上反映微泡振动过程中能量转换能力的强弱, 是振动非线性及谐波共振叠加的综合体现. 特别地, 当R20 = 5 μm时沿着频率增大方向, 微泡从混沌经倍周期最后进入稳定周期1运动, 呈现倒分岔特性(图4(c)), 表明微泡混沌运动发生在低频区域, 在该区域选择声频率参数可提高超声治疗效果. 对比图4(a)、图4(b)及图4(c)发现, 随初始半径增大, 跳跃点增多且跳跃幅度增大、振动非线性更为强烈, 一般磁性微泡的尺寸都在5 μm以下[26]; 对初始尺寸一定的微泡可通过控制声波频率使其做稳定周期振动或混沌运动.
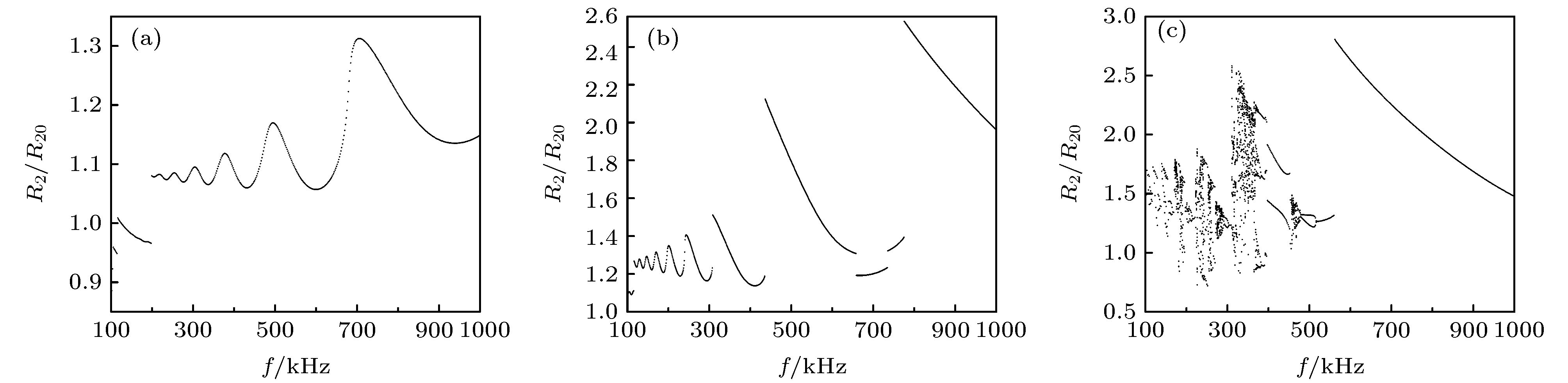 图 4 不同尺寸MMB频响曲线(Pa = 150 kPa) (a) R20 = 3 μm; (b) R20 = 4 μm; (c) R20 = 5 μm
图 4 不同尺寸MMB频响曲线(Pa = 150 kPa) (a) R20 = 3 μm; (b) R20 = 4 μm; (c) R20 = 5 μmFigure4. Bifurcation diagrams of an MMB with driving frequency as the control parameter at Pa = 150 kPa: (a) R20 = 3 μm; (b) R20 = 4 μm; (c) R20 = 5 μm.
值得注意的是, 图4(c)所展示出的微泡在驱动压一定条件下的倒分岔频率响应特性, 与图2所展示的在固定声波频率时响应是截然不同的, 表明磁性微泡对驱动频率响应具有复杂性. 经对图4(c)混沌区观察发现, 该区域呈现出一定准周期性且每个周期的局部似乎都有与整体相似的倒分岔结构. 若局部与整体有自相似结构, 则表明混沌区是无限多个倍周期分岔的结果[27]. 为进一步考察微泡频率响应的细节, 在图4(c)中令f在一个小范围取值如取f分别为350, 381 及550 kHz, 图5(a)—(c)给出所相应的振动相图. 当f = 350 kHz时, 相图上存在无数条相轨迹且这些轨迹疏密不均匀, 奇点数目(速度、加速度均为零的点)众多, 表现出强烈的混沌运动特性(图5(a)); 当f =381 kHz时, 奇点数目迅速减少, 极限环中出现近邻轨迹跳跃现象, 其原因主要应归于微泡倍周期振动的非线性(图5(b)); 当f = 550 kHz时, 微泡相轨迹是一曲线环仅有2个奇点(图5(c)), 此时微泡做线性等幅振动.可见, 驱动频率在一个非常小的变化范围, 微泡的运动也是从混沌按倍周期分岔途径、向单极限环过渡的过程, 呈现出与整体相似的倒分岔特性, 证实混沌区是无限多个倍周期分岔的结果.
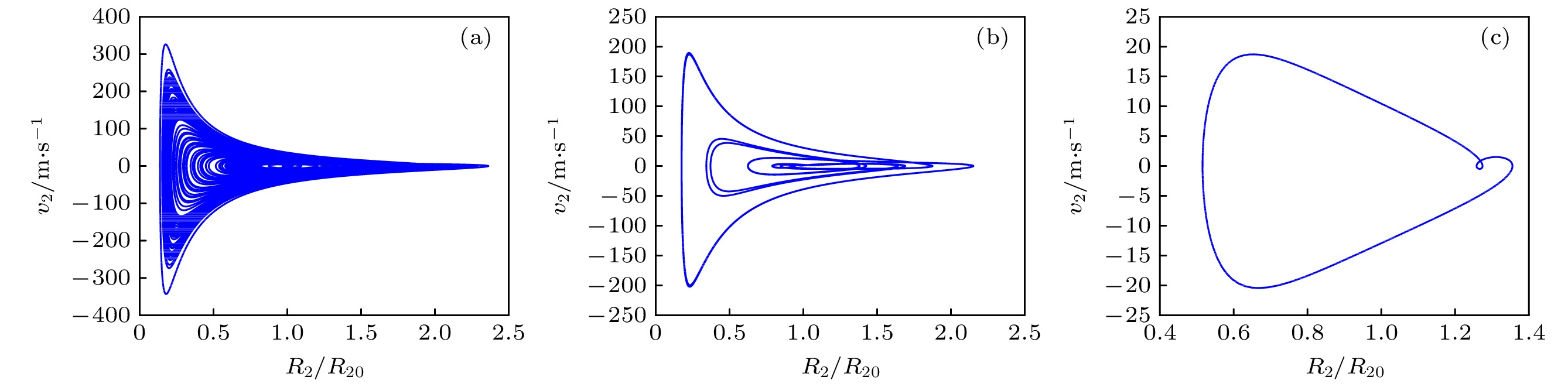 图 5 混沌态微泡振动相图 (Pa = 150 kPa, R20 = 5 μm) (a) f = 350 kHz; (b) f = 381 kHz; (c) f = 550 kHz
图 5 混沌态微泡振动相图 (Pa = 150 kPa, R20 = 5 μm) (a) f = 350 kHz; (b) f = 381 kHz; (c) f = 550 kHzFigure5. MMB phase diagram in chaotic motion (Pa = 150 kPa, R20 = 5 μm): (a) f = 350 kHz; (b) f = 381 kHz; (c) f = 550 kHz.
2
3.2.颗粒体积分数$ \alpha$
的影响
前面讨论了装载有确定体积分数磁性颗粒(α = 0.1)微泡的振动特性, 另一个更为有兴趣的问题是, SPIOs的数量如何影响微泡的振动行为, 同样声场条件下载磁和无磁微泡振动特性的差别. 以磁性纳米颗粒体积分数α = 0作为参照组进行对比, 分析微泡(R20 = 5 μm, d = 100 nm, K = 0.3 N/m)在Pa = 150 kPa, f = 500 kHz时对α的响应, 结果见图6所示. 图6中两条黑色实线代表微泡做周期2运动, 线条附近的点代表在特定频率下微泡振动出现小的扰动.从两条线的变化趋势看, R2/R20在α = 0时有最大值, 随着α增加R2/R20线性的缓慢的下降, 表明颗粒的存在一定程度上抑制了泡的振动, 但这种影响总体来看比较小.另外, 在α的一些离散取值点R2/R20出现波动且α较大处波动稍显密集, 可能与微泡振动的随机不稳定性有关.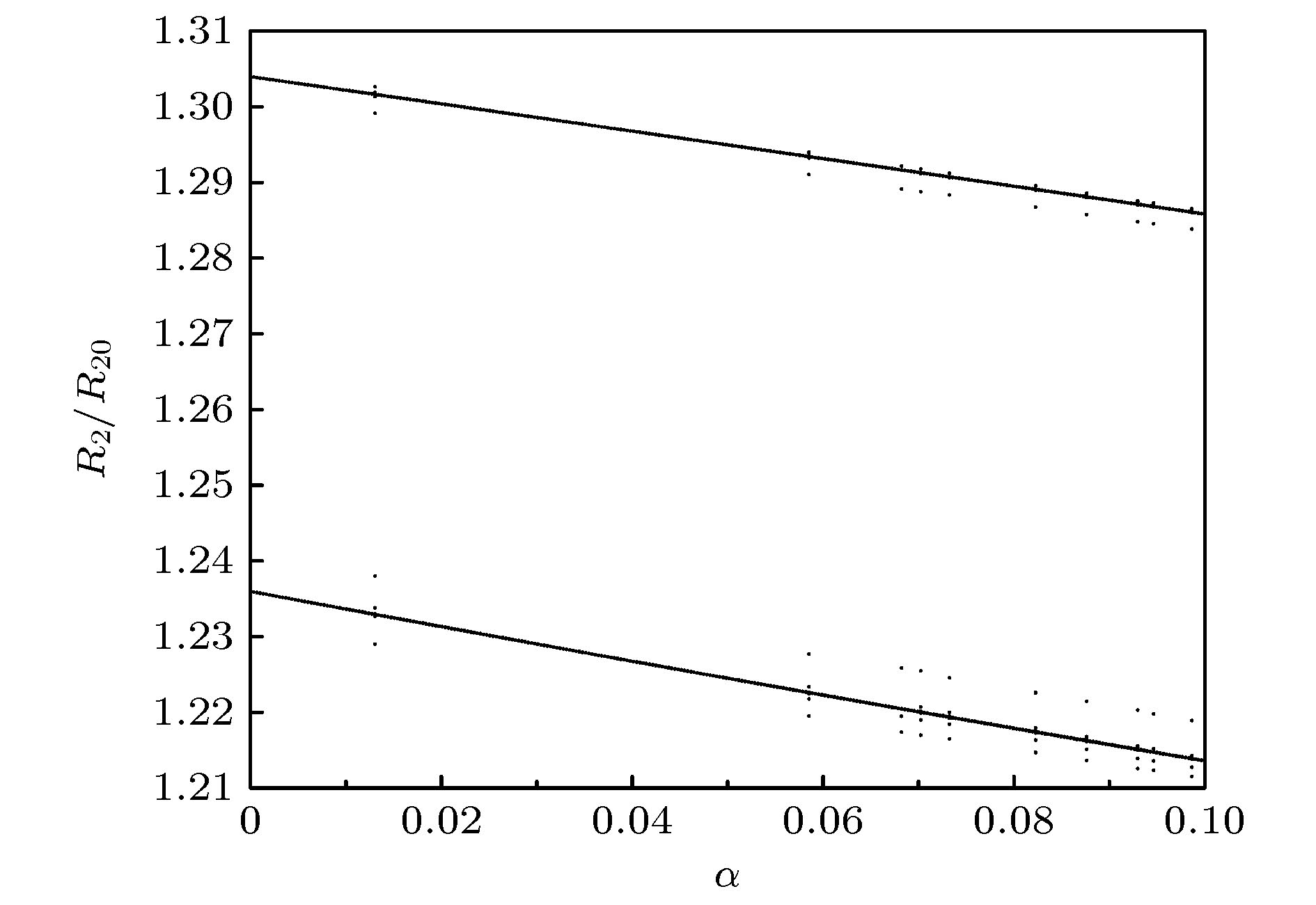 图 6 α对R2/R20的影响
图 6 α对R2/R20的影响Figure6. R2/R20 responses to α.
2
3.3.K值的影响
与磷脂膜张力相关的常数K的取值取决于膜层材料特性, (15)式中虽未考虑磷脂薄层厚度, 但却考虑了其所引起的外表面张力变化的影响并通过控制K值体现. 图7显示Pa = 150 kPa, f = 350 kHz, K在0—2 N/m范围内变化时R2/R20响应分岔图. K在0.2—0.4 N/m之间磁性微泡存在一个不稳定响应区, 大于0.4 N/m或小于0.2 N/m其影响较小. 对油基磁流体为内膜层的磁性微泡, 可通过选择合适的外膜层材料控制其声响应.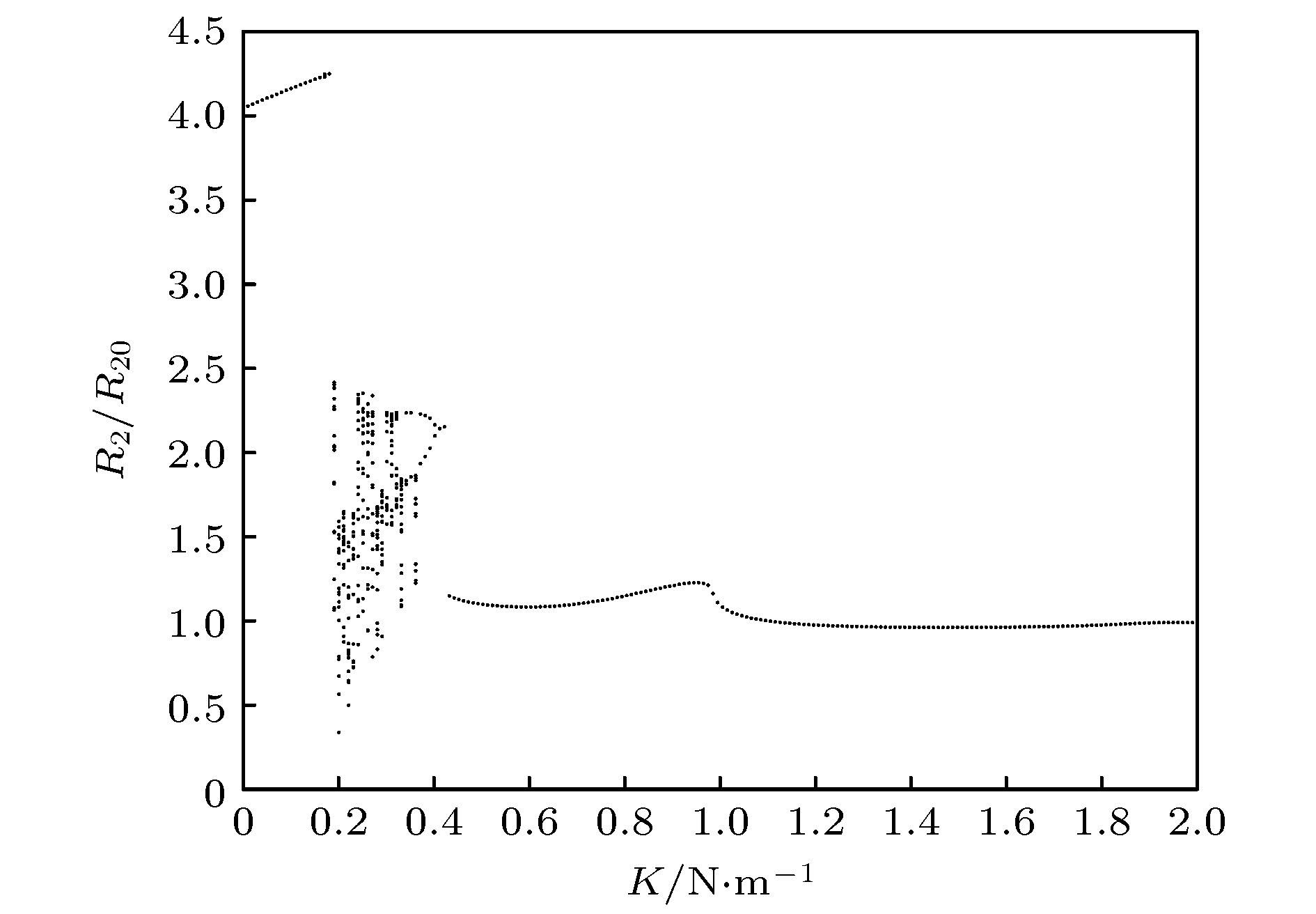 图 7 K值响应
图 7 K值响应Figure7. MMB responses to K.
2
3.4.膜层厚度的影响
微泡膜层厚度也会对其振动产生影响, 图8给出 f = 350 kHz, Pa = 150 kPa, R20 = 5 μm, α = 0.1, K = 0.3 N/m时微泡的R2/R20–d变化规律.当d在17 nm以下时泡做稳定的周期1振荡, 随着d逐渐增大振荡失稳进入混沌运动, 在300 nm附近通过倍周期分岔返回稳定周期运动, 可见膜层厚度在50—150 nm附近有利于微泡的谐波响应.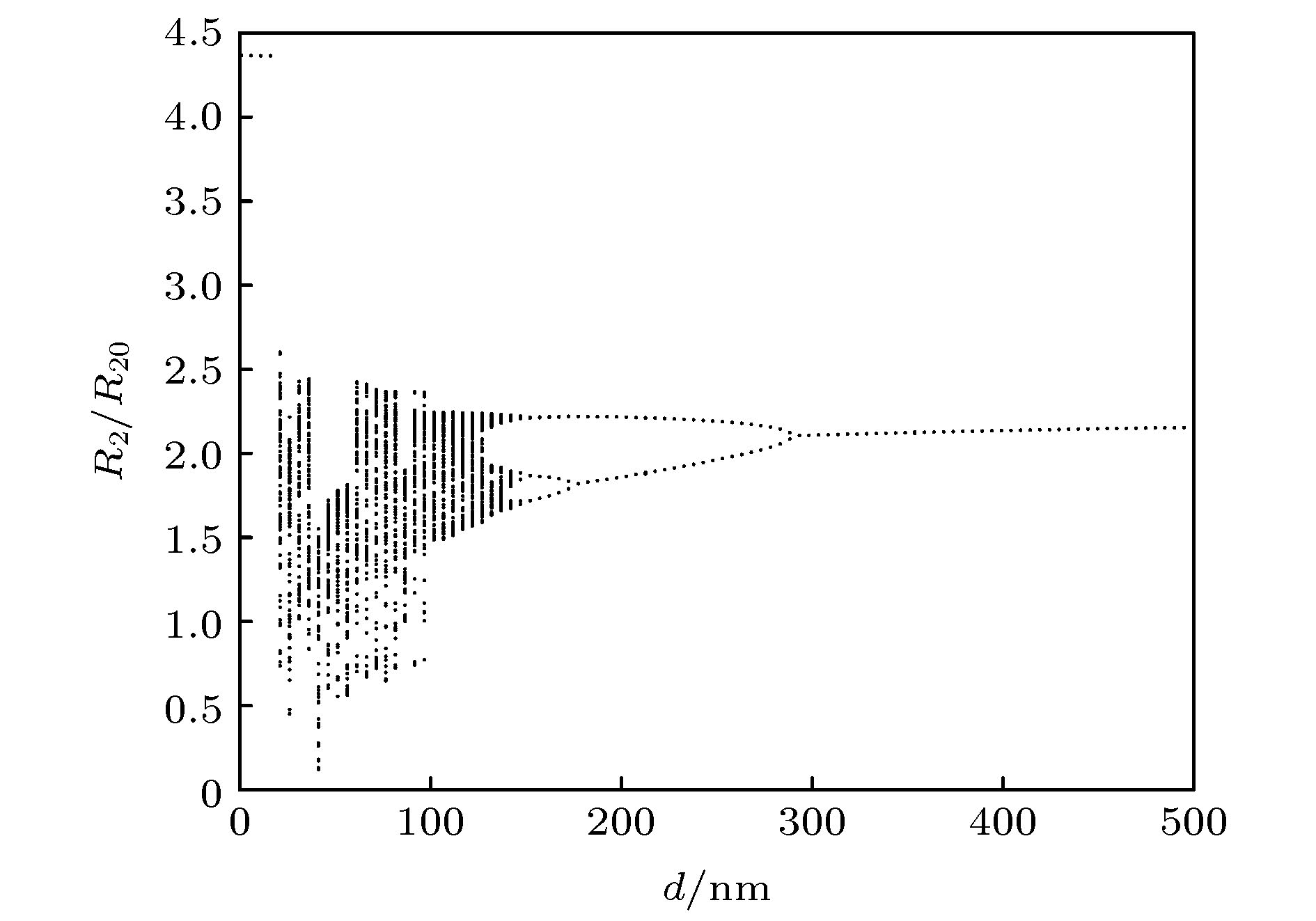 图 8 膜厚响应
图 8 膜厚响应Figure8. MMB responses to film thickness.

