1.National and Local Joint Engineering Research Center for Space Optoelectronics Technology, Changchun University of Science and Technology, Changchun 130022, China 2.State Key Laboratory of Applied Optics, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China 3.School of Science, Changchun University of Science and Technology, Changchun 130022, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 61805028, 61805027, 61705019, 61701045, 61890960), the Special Fund for The State Administration of Science, Technology and Industry for National Defense (Grant No. KJSP2016010202), the Project supported by the Joint Funds for astronomy of the National Natural Science Foundation of China (Grant No. U1731240), the Scientific Research Foundation of the Education Department of Jilin Province, China (Grant No. JJKH20190563KJ), the Natural Science Foundation of Jilin Province, China (Grant No. 20180101338JC), and the Open Fund for State Key Laboratory of Applied Optics, China (Grant No. SKLA02020001A11)
Received Date:17 June 2020
Accepted Date:28 July 2020
Available Online:05 December 2020
Published Online:20 December 2020
Abstract:The traditional window of high-speed aircraft is hemispherical, and the aberration produced by such a window is constant. However, the hemispherical window is difficult to meet the requirements of a high speed flight of aircraft. Aspheric windows are usually used to replace hemispherical windows to increase the aerodynamic performance. However, the aspheric window will introduce dynamic aberrations that fluctuate with the change of scanning field-of-view (FOV), which becomes the key issue of the development of optoelectronic imaging systems for high-speed aircraft. For the ellipsoidal window optical system with scanning FOV of ±60°, an aberration correction method in large FOV combined with the static correction and non-wavefront-sensor adaptive optical correction is studied. In the initial optical structure design, the types of system aberration are reduced and the fifth-order Zernike aberration is eliminated during initial aberration correction, thus, the number of the subsequent adaptive optimization control variables is reduced. According to the characteristics of the deformable mirror, the driving voltage of the driver is generally taken as a variable of the genetic algorithm. However, when the deformable mirror used has many units, too many variables will directly lead the optimization speed of the algorithm to greatly decrease. So, according to the aberration characteristics of the ellipsoidal optical window, using the conversion matrix between the Zernike polynomial coefficients and the voltages of the deformable mirror driver, the optimization variable is reduced from 140 driver voltages to 2?9 Zernike stripe polynomial coefficients in number. Finally, the genetic algorithm based on Zernike model is used to control the shape of the deformable mirror and correct the residual aberration. Taking 2?9 Zernike mode coefficients, 2?16 Zernike mode coefficients and 140 driver voltages as the variables of genetic algorithm respectively, the optimization generations of genetic algorithm under different variables are obtained. The simulation results show that the optimization speed of each typical scanning field of view is increased more than 95% by changing the variable from 140 driver voltages to 2?9 Zernike mode coefficients, and the imaging quality is close to the diffraction limit. This optimization method can not only correct the aberrations caused by the special-shaped optical window, but also compensate for the error caused by processing and aligning the optical system. Keywords:aspheric window/ Zernike polynomials/ deformable mirror/ genetic algorithm
本文采用氟化镁作为椭球形窗口的材料, 该窗口的最大口径为100 mm, 厚度为4 mm, 长径比[16,17]为1.0. 窗口后的成像系统扫描视场角度为 ± 60°. 以光阑中心作为窗口旋转的节点, 旋转步进角5°, 工作波段为中波红外, F数为1.5, 入瞳直径为30 mm. 为了获得视场范围内窗口像差分布, 将一理想成像系统放在光阑处代替实际观测系统. 椭球形窗口和实际观测系统的示意图如图1所示. 图 1 椭球形窗口和观测系统的示意图 Figure1. Schematic diagram of ellipsoid window and observation system.
Zernike多项式是在单位圆内部连续正交的无穷项的多项式完全集, 其与赛德尔像差项具有对应性, 因此采用Zernike多项式来表示椭球形窗口的光学像差. 用Zernike多项式对不同视场角下的椭球形窗口光学系统进行波面拟合, 各项系数随扫描视场的变化如图2所示. 图 2 Zernike系数随视场变化 Figure2. Variation of Zernike coefficients with field of view.
 图 1 椭球形窗口和观测系统的示意图
图 1 椭球形窗口和观测系统的示意图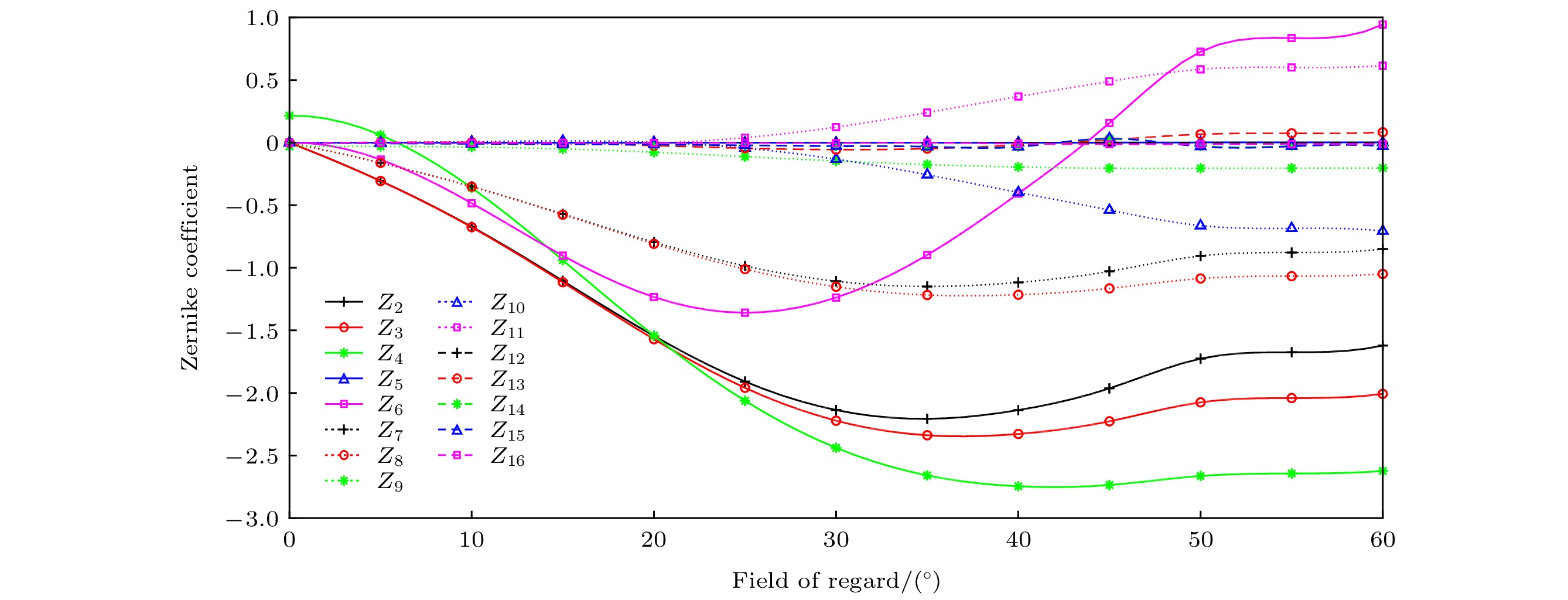 图 2 Zernike系数随视场变化
图 2 Zernike系数随视场变化 图 3 椭球形窗口光学系统光路图
图 3 椭球形窗口光学系统光路图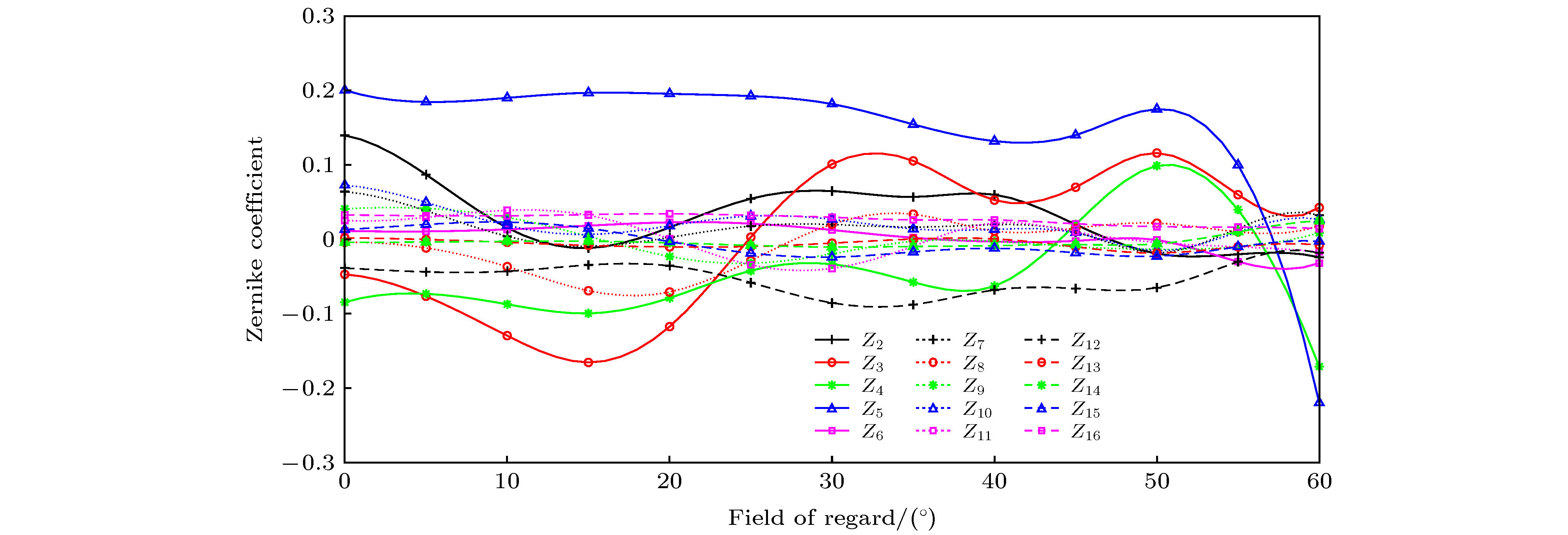 图 4 优化后Zernike系数随视场变化
图 4 优化后Zernike系数随视场变化 图 5 变形镜驱动器排布
图 5 变形镜驱动器排布 图 6 遗传算法流程图
图 6 遗传算法流程图





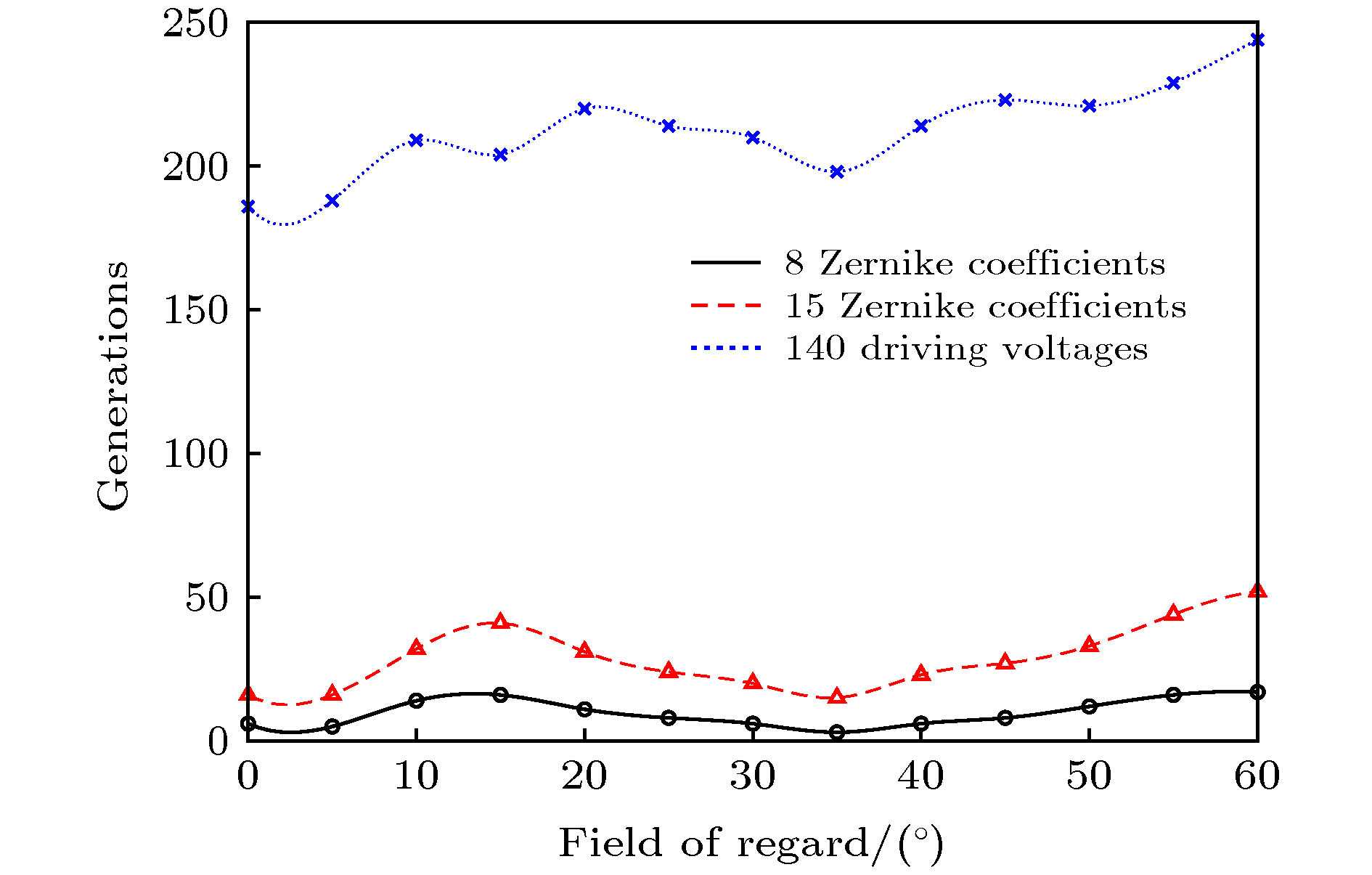 图 7 不同变量下的优化代数
图 7 不同变量下的优化代数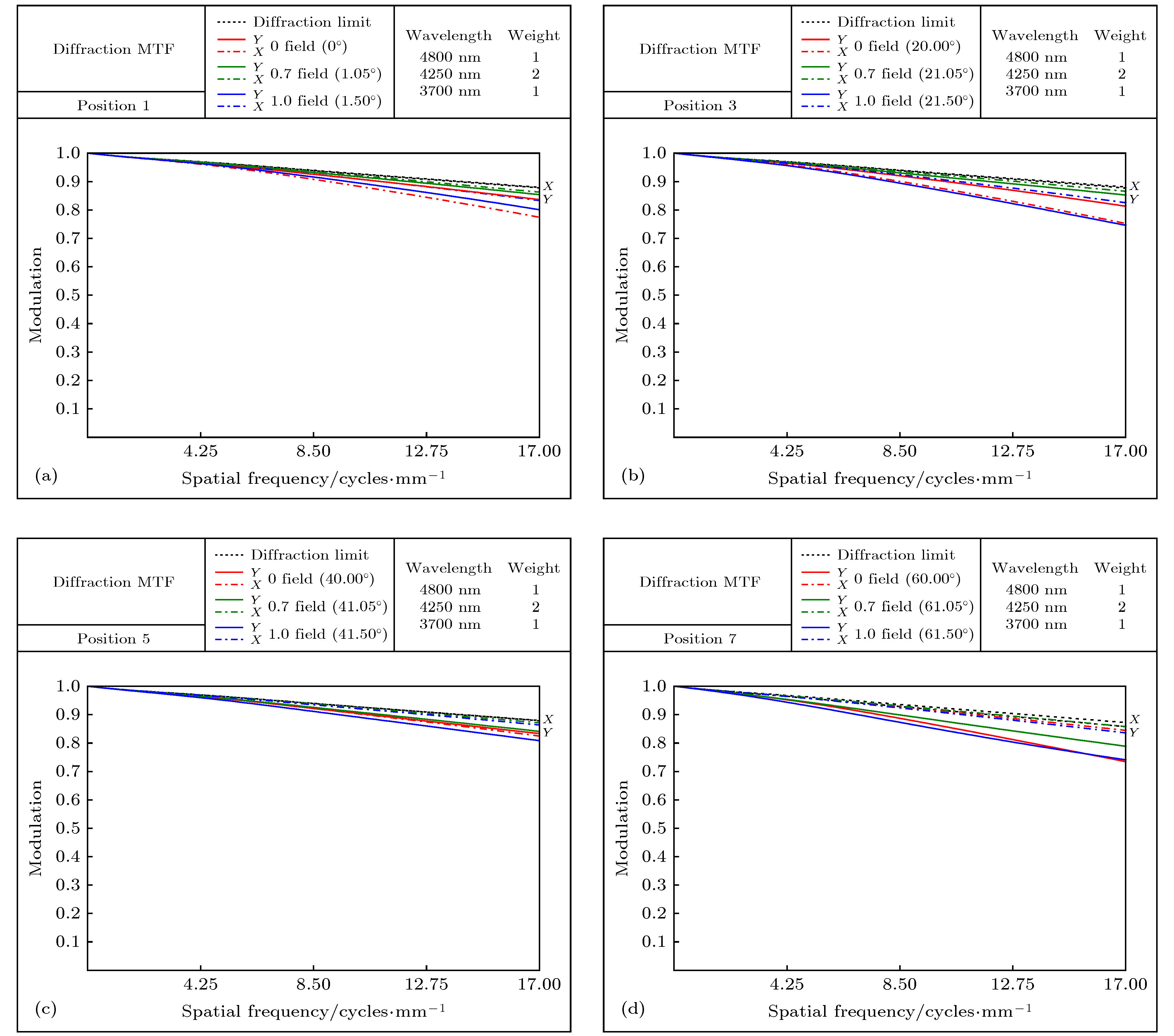 图 8 不同变焦位置的MTF图 (a) 0°; (b) 20°; (c) 40°; (d) 60°
图 8 不同变焦位置的MTF图 (a) 0°; (b) 20°; (c) 40°; (d) 60°