Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 51767022, 51967019), the Natural Science Fundation of Xinjiang Uygur Autonomous Region, China (Grant No. 2019D01C082), the Science Startup Foundation of Xinjiang University for doctor, and the Tianchi Projection of Xinjiang Uygur Autonomous Region for Doctor, China
Received Date:19 March 2020
Accepted Date:05 July 2020
Available Online:22 October 2020
Published Online:05 November 2020
Abstract:The main purpose of this paper is to reveal the evolution mechanism of the bursting oscillation and suppress the bursting oscillation. The permanent magnet synchronous motor (PMSM) system is taken as a research object, and the case of the PMSM with periodic external load perturbation is considered. The first part in this paper is for the analysis of bursting oscillation. First, a mathematical model of the non-autonomous PMSM system with external load perturbation is established, and the frequency of the external load perturbation is set to be far less than the natural frequency of the PMSM system, so that the PMSM system has a fast-slow coupling effect. Then, the non-autonomous PMSM system with external load perturbation is transformed into a generalized autonomous PMSM system by taking the external load perturbation as a slow-varying parameter of the PMSM system. In order to obtain the bifurcation behaviors and different equilibrium types of the PMSM system, the time series diagram, the equilibrium point distribution curve that changes with slow-varying parameter, and the transformed phase portrait are analyzed. Finally, the evolution mechanism of bursting oscillation is revealed by analyzing the overlay of the equilibrium point distribution curve and the transformed phase portrait, and it is found that the change of the equilibrium type and the corresponding bifurcation behavior will cause the PMSM system to exhibit “periodic symmetrical subcritical Hopf bursting oscillation”. The second part focuses on the control of the bursting oscillation. First, a macro-variable is defined by using the synergetic control strategy, which is a linear combination of all state variables of the PMSM system. Then, the synergetic controller is designed based on the constraint that the macro-variable converges to the invariant manifold. When the macro-variable converges to the invariant manifold, the PMSM system is also stabilized to the equilibrium. In addition, in order to explore the influence of controller parameters, a large number of simulation experiments are carried out, and the relationship between the control parameters with the response speed of the PMSM system is obtained. Finally, the effectiveness of the synergetic control strategy is verified by changing the amplitude of the external load perturbation. The simulation results show that the synergetic control strategy has a continuous control law when the system has external load perturbations, and can effectively suppress the bursting oscillation phenomenon of the PMSM system, so that the PMSM system runs stably. Keywords:permanent magnet synchronous motor/ bursting oscillation/ synergetic control/ bursting suppression
图 2$\tilde \omega $关于慢变参数${\tilde T_{\rm{L}}}$的平衡点分布曲线 Figure2. Equilibrium point distribution curve of $\tilde \omega $ with respect to the slow-varying parameter ${\tilde T_{\rm{L}}}$.
将PMSM系统在(${\tilde T_{\rm{L}}}$, $\tilde \omega $)平面的转换相图与$\tilde \omega $随慢变参数${\tilde T_{\rm{L}}}$变化的平衡点分布曲线叠加起来, 得到图3(a), 其中图3(b)是图3(a)的局部放大图. 由图1中$\tilde \omega $的时间历程图可知, PMSM系统中状态变量的轨迹做周期性的顺时针运动, 对应图3(a)中的红色箭头指示的顺时针运动方向. 图 3 转子机械角速度$\tilde \omega $的簇发振荡示意图 (a) (${\tilde T_{\rm{L}}}$, $\tilde \omega $)平面上的转换相图与平衡点分布曲线的叠加图; (b) 图3(a)的局部放大图 Figure3. Bursting Oscillation of $\tilde \omega $: (a) Overlay of the transformed phase portrait and equilibrium point distribution curve on the (${\tilde T_L}$, $\tilde \omega $) plane; (b) locally enlarged diagram of Fig. 3(a).















































 图 1
图 1 

 图 2
图 2 








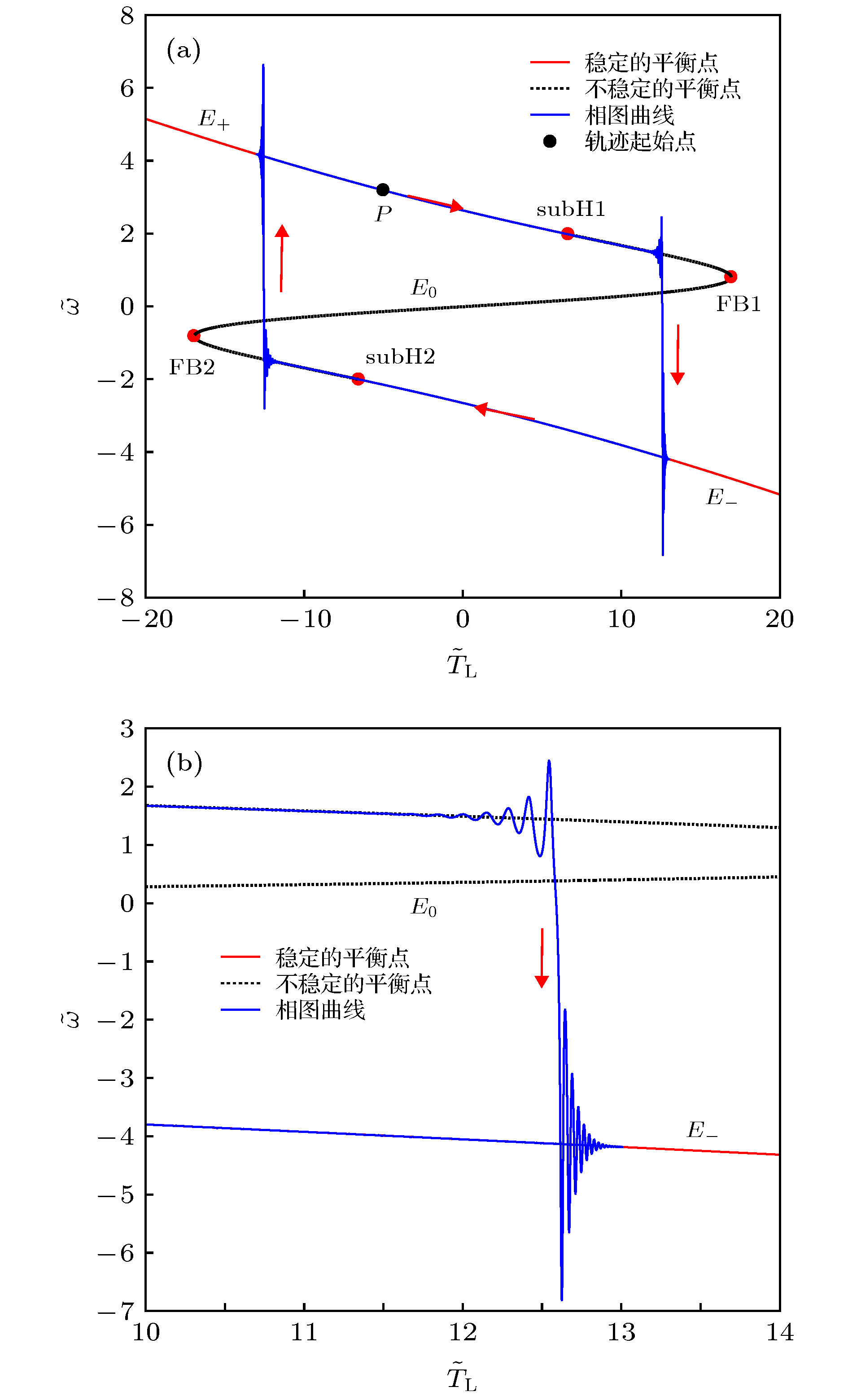 图 3 转子机械角速度
图 3 转子机械角速度

































































































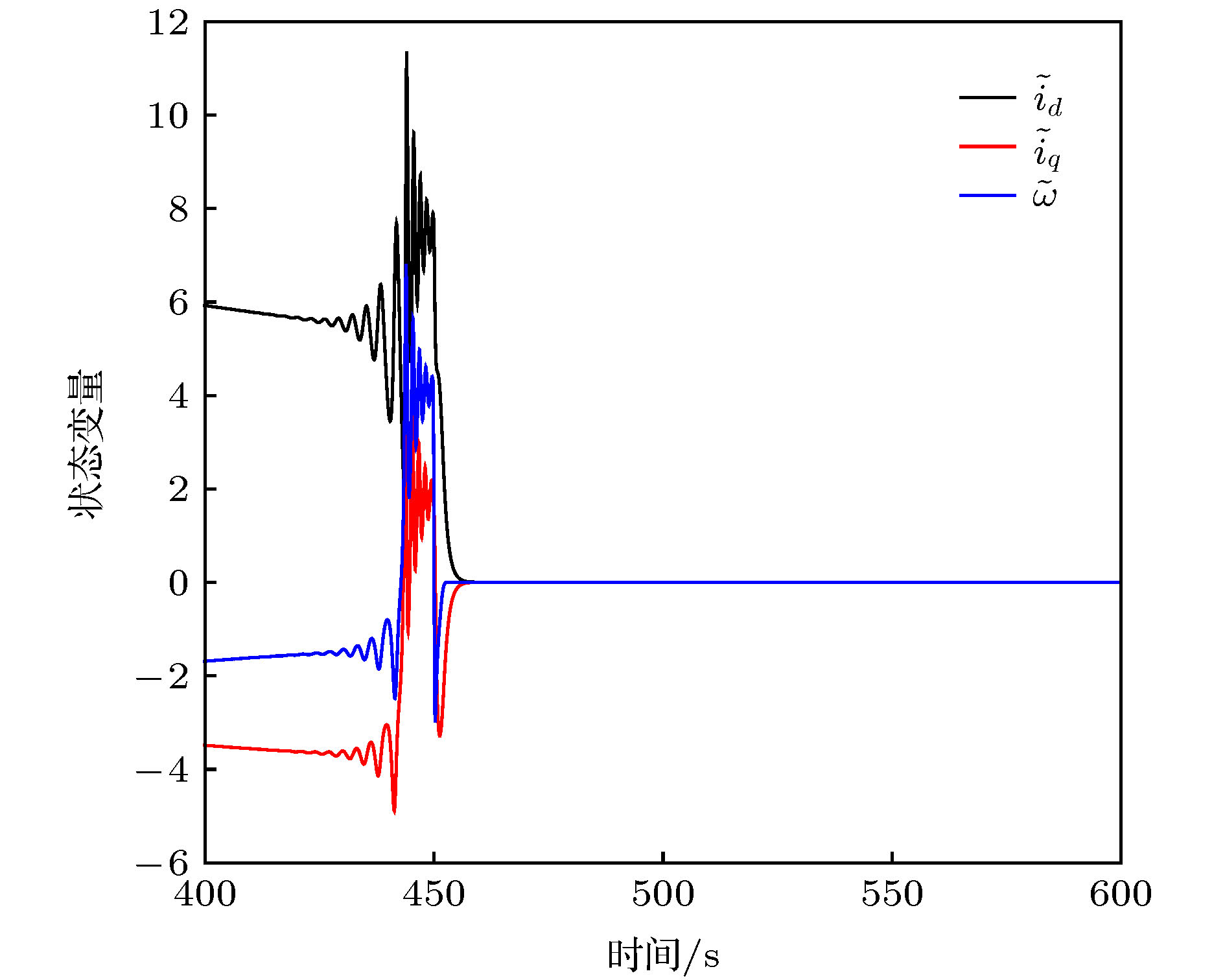 图 4 PMSM系统的状态响应曲线
图 4 PMSM系统的状态响应曲线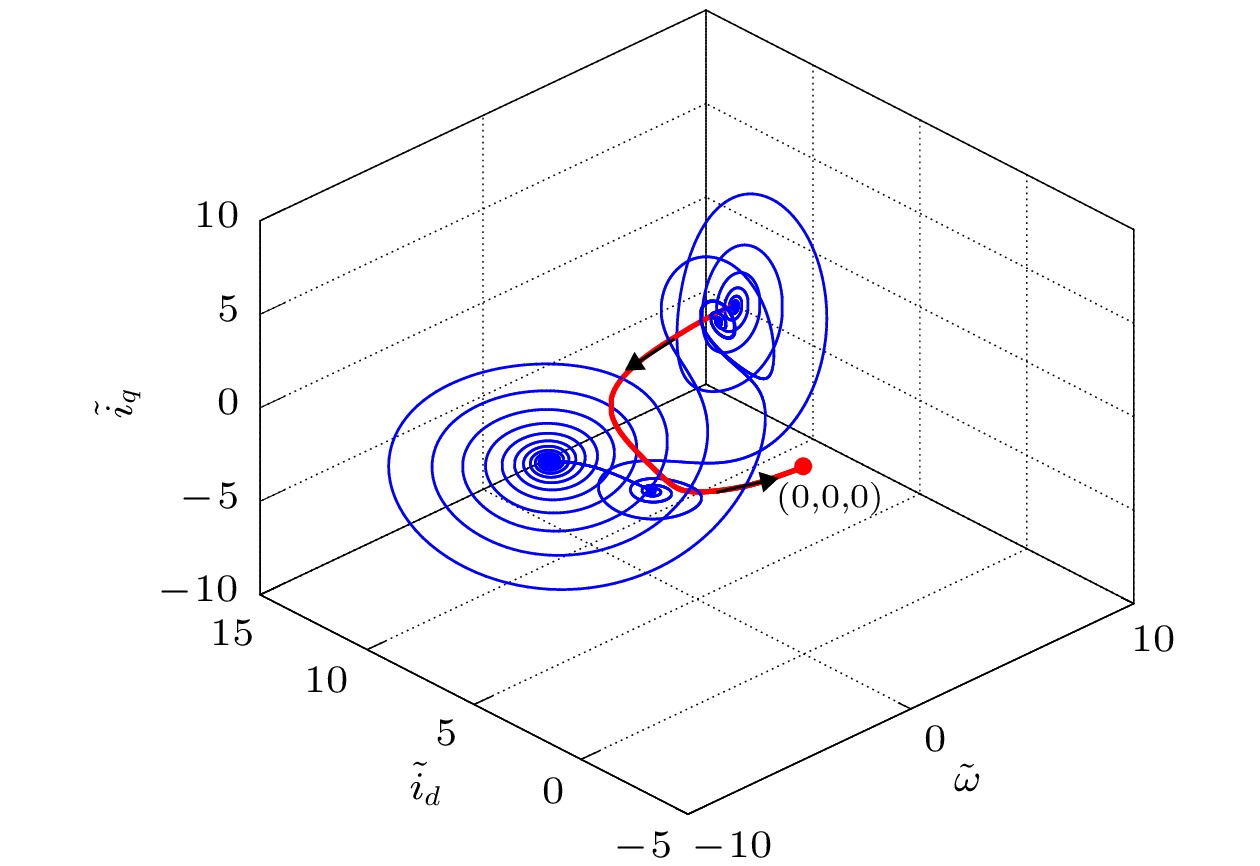 图 5 PMSM系统状态的相图
图 5 PMSM系统状态的相图



 图 6 宏变量
图 6 宏变量




 图 7 PMSM系统和宏变量
图 7 PMSM系统和宏变量





 图 8 PMSM系统和宏变量
图 8 PMSM系统和宏变量

































 图 9 不同扰动下的PMSM系统的状态响应
图 9 不同扰动下的PMSM系统的状态响应

