1.School of Science, Jiangxi University of Science and Technology, Ganzhou 341000, China 2.College of Applied Science, Jiangxi University of Science and Technology, Ganzhou 341000, China 3.School of Physics and Telecommunication Engineering, South China Normal University, Guangzhou 510006, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11905086, 11804131), the Natural Science Foundation of Jiangxi Province, China (Grant No. 20192BAB212006), and the Foundation of Jiangxi Provincial Educationa Department, China (Grant Nos. GJJ191598, GJJ191599)
Received Date:07 April 2020
Accepted Date:08 July 2020
Available Online:09 November 2020
Published Online:20 November 2020
Abstract:Considering the periodic boundary conditions, a new prescription for separating binary mixtures of chiral active particles by time-delayed feedback in a two-dimensional square box is proposed. We investigate the angular velocity, the feedback intensity, the delayed time, the rotational diffusion coefficient, the self-propelled speed and the packing fraction as functions of the effective diffusion coefficient and the separation coefficient numerically by the extensive Brownian dynamics simulations. It is found that mixed chiral active particles be separated without time-delayed feedback, but the dynamics of chiral active particles are different obviously and mixed chiral particles can be separated when the time-delayed feedback is introduced. The particle configuration (mixing or demixing) is determined by the dominant factor of particles’ diffusion. We can control the extent to which the diffusion of counterclockwise (CCW) active particles is affected by the diffusion of clockwise (CW) active particles adjusting the strength and the delayed time of the feedback. The response to the feedback for different chiral particles show different behaviors under different system parameters. When the feedback intensity is strong and the delayed time is long enough, the angular velocity of counterclockwise particles is accelerated and the diffusion of which is dominated by the interactions between particles completely. However, the angular speed of clockwise particles change little and the diffusion of which is determined by its parameters and particle interactions jointly. In this case, the counterclockwise particles aggregate to form clusters easily, and the clockwise particles diffuse quickly, therefore, the mixed chirality active particles are separated. When the feedback intensity is weak and the delayed time is short, the chirality difference between different chiral particles modulated by the feedback is smaller than the former case. The diffusions of counterclockwise particles and clockwise particles are both determined by their parameters and particle interactions, and the particles are mixed. Our findings provide novel strategies for the experimental pursuit of separating mixed chiral active particles and could be applied practically in many biological circle swimmers, such as autochemotactic particles, the bacteria in an external light field and sperm cells with vortex motion. Keywords:active particles/ diffusion/ time-delayed feedback/ particle separation
为了研究团簇大小, 使用CW粒子和CCW粒子的最大团簇粒子数占各自总粒子数的比例$ P = \langle N_{\rm {cl}} \rangle/(N/2) $随角速度$ \omega $的变化如图3(a)中描述. $ N_{\rm {cl}} $为最大团簇的粒子数个数. P越大代表团簇尺寸越大, 表明粒子分离. 由图可知, 比例P是角速度$ \omega $的峰值函数. 图中a, b, c及d四点的分布图分别对应图2(a),图2(b), 图2(c)及图2(d). 由图3(a)可以看出, 1) 当$ \omega = 0 $时(a, b点), CW粒子和CCW粒子的最大团簇强度P相等. 当$ K_{\rm {fb}} = 0 $时, 由于MIPS效应, 最大团簇强度比例$ P = 0.8 $; 当$ K_{\rm {fb}} = 10.0 $, $ \tau = 10.0 $, $ \omega = 0 $时, 两种粒子均做逆时针旋转且旋转半径很小, 几乎各自待在原地打转, 因此$ P = 0 $. 2) 当$ \omega = 2.2 $时(c点)时, 在外加时间延迟反馈作用下, CW粒子角速度不变, CCW粒子角速度增大, 在两种粒子相互作用下, CCW粒子聚集成一大团簇, P接近于1, 达到最大值; CW粒子旋转半径更大, 扩散更大, 聚集成小团簇, $ P\simeq0.2 $. 3) 当$ \omega = 4.2 $时(d点), CCW角速度继续增大, CW粒子旋转半径继续减小, 均聚集成更小团簇. 图3(b)绘制了不同$ \omega $下, $ K_{\rm {fb}} = 10.0 $, $ \tau = 10.0$, $ t = 2\times10^4 $时, 相对径向分布函数$ g_{\rm {AB}}(r) $. 图中标注的圆圈为第一个零根, 代表单种粒子的团簇尺寸. 当$ \omega = 0.0 $和$ 5.4 $时, 顺时针和逆时针粒子旋转角速度都很大, 旋转半径很小, 所以团簇尺寸很小; 随着$ \omega $增加, 反馈加速CCW粒子旋转, 对CW粒子无作用, 逆时针旋转角速度很大, 顺时针旋转角速度很小, 团簇尺寸增大, 当$ \omega = 2.2 $时, 团簇尺寸达到最大值. 图 3 (a) CW粒子和CCW粒子的最大团簇粒子数占各自总粒子数的比例P随角速度$ \omega $的变化. 图中a, b, c, d四点的构型图分别对应图2(a), 图2(b), 图2(c), 图2(d); (b)在不同$ \omega $下, $ t = 2\times10^4 $时, 相对径向分布函数$ g_{\rm {AB}}(r) $. 图中标注的圆圈为第一个零根, 代表单种粒子的团簇尺寸. 其他参数设置为$ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, $ \phi = 0.5 $, $ K_{\rm {fb}} = 10.0 $, $ \tau = 10.0 $ Figure3. (a) The ratio of the particle number in maximum cluster of CW particles and CCW particles to the total number of particles respectively as a function of $ \omega $. The points a, b, c, d are corresponding to Fig. 2(a),Fig. 2(b),Fig. 2(c),Fig. 2(d), respectively; (b) relative radial distribution function $ g_{\rm {AB}}(r) $ for different value of $ \omega $ at $ t = 2\times10^4 $. The first non-trivial root (marked by circles) denotes the cluster size of the single particle species. The other parameters are $ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, $ \phi = 0.5 $, $ K_{\rm {fb}} = 10.0 $, and $ \tau = 10.0 $.
为了进一步描述粒子动力学, 分别研究了有效扩散系数D和分离系数S随角速度$ \omega $, 反馈强度$K_{\rm {fb}}$, 反馈时间$ \tau $, 转动扩散系数$ D_{\theta} $, 自驱动速度$ v_0 $, 填充率$ \phi $和时间t的变化. 图4—图10中的每条曲线均是由100次模拟的统计平均得到的. 图 4 (a)在不同$ K_{\rm {fb}} $和$ \tau $值下, CCW粒子和CW粒子的有效扩散系数D随角频率$ \omega $的变化; (b)在不同$ K_{\rm {fb}} $和$ \tau $下, 分离系数S随角频率$ \omega $的变化. 其他参数设置为$ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, $ \phi = 0.5 $ Figure4. (a) The effective diffusion coefficient D of CCW and CW particles as a function of $ \omega $ for different $ K_{\rm {fb}} $ and $ \tau $; (b) the separation coefficient S as a function of $ \omega $ for different $ K_{\rm {fb}} $ and $ \tau $. The other parameters are $ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, and $ \phi = 0.5 $.
图 10 (a)在不同填充率$ \phi $下, 分离系数S随时间t的变化; (b)在不同时间t下, $ \phi = 0.5 $时, 相对径向分布函数$ g_{\rm {AB}}(r) $. 图中标注的圆圈为第一个零根, 代表单种粒子的团簇尺寸. 其他参数设置为$ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, $ \omega = 2.1 $, $ K_{\rm {fb}} = 10.0 $, $ \tau = 10.0 $ Figure10. (a) The separation S as a function of t for different $ \phi $; (b) the relative radial distribution function $ g_{\rm {AB}}(r) $ for different t at $ \phi = 0.5 $. The first non-trivial root (marked by circles) denotes the cluster size of the single particle species. The other parameters are $ v_0 = 2.5 $, $ D_{\theta} = 0.001 $, $ \omega = 2.1 $, $ K_{\rm {fb}} = 10.0 $, and $ \tau = 10.0 $.

























 图 1 时间延迟反馈示意图. 当
图 1 时间延迟反馈示意图. 当













































































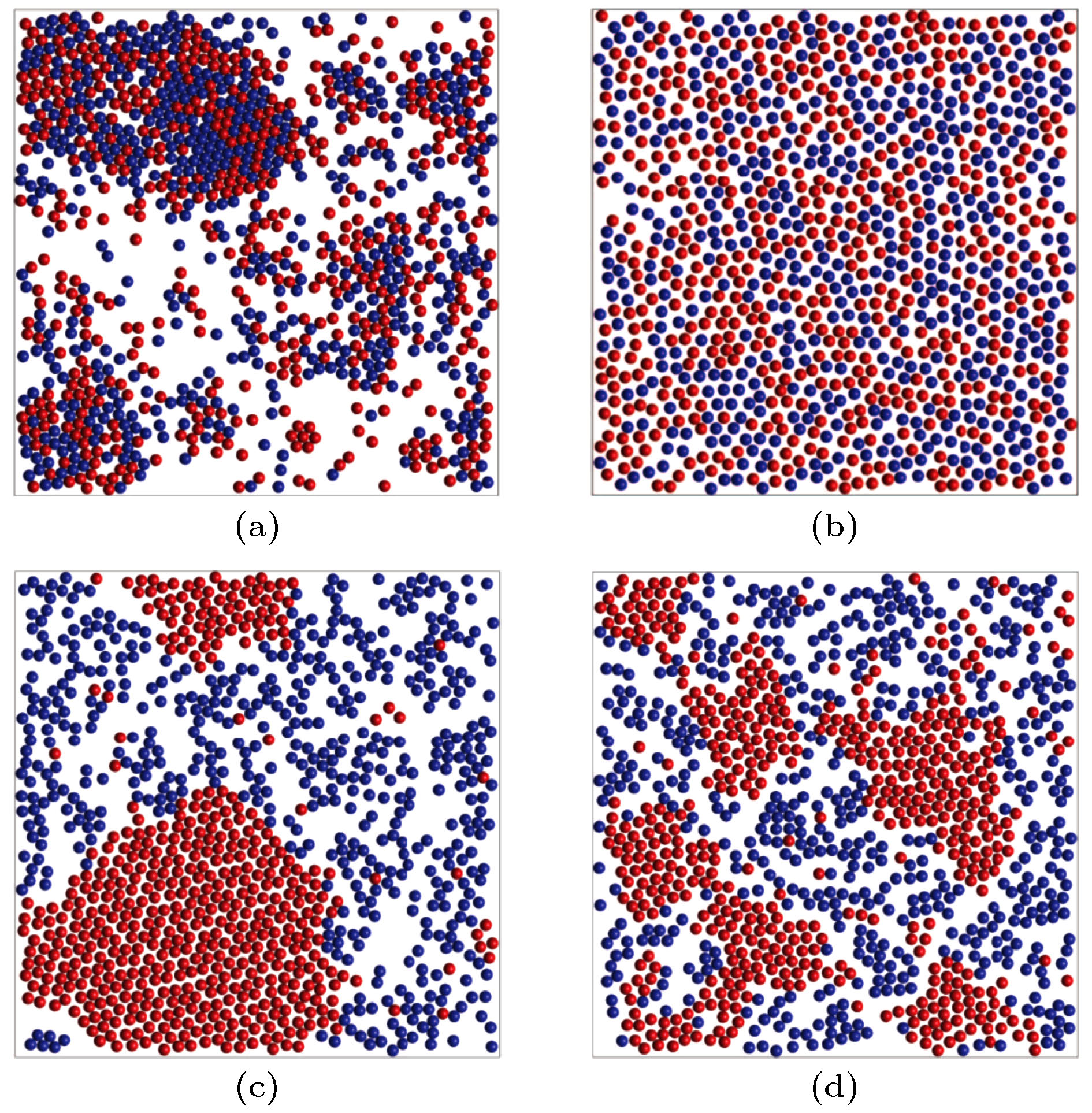 图 2 CCW粒子(红色)和CW粒子(蓝色)的混合物分布 (a)
图 2 CCW粒子(红色)和CW粒子(蓝色)的混合物分布 (a)




































 图 3 (a) CW粒子和CCW粒子的最大团簇粒子数占各自总粒子数的比例P随角速度
图 3 (a) CW粒子和CCW粒子的最大团簇粒子数占各自总粒子数的比例P随角速度























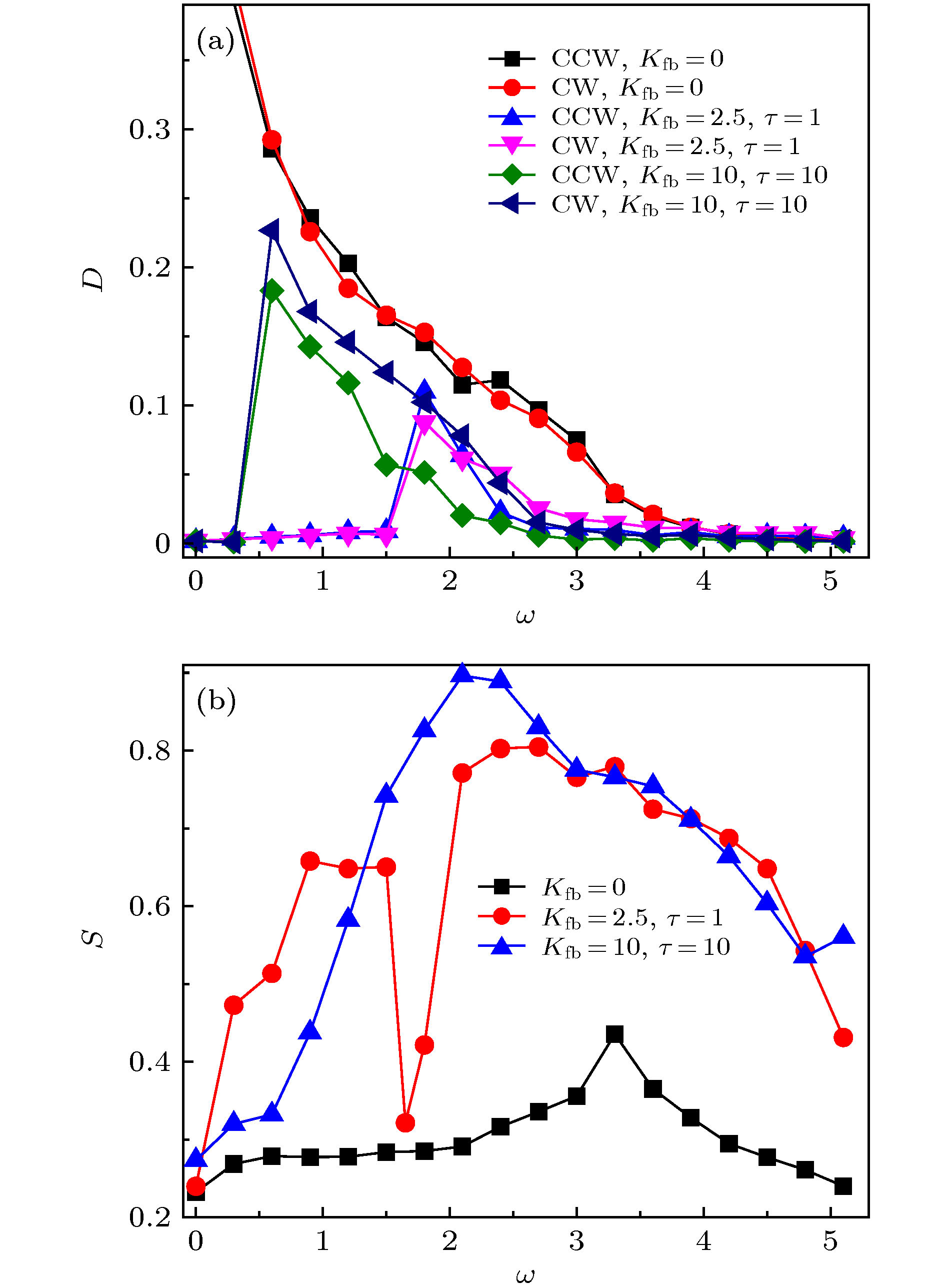 图 4 (a)在不同
图 4 (a)在不同

















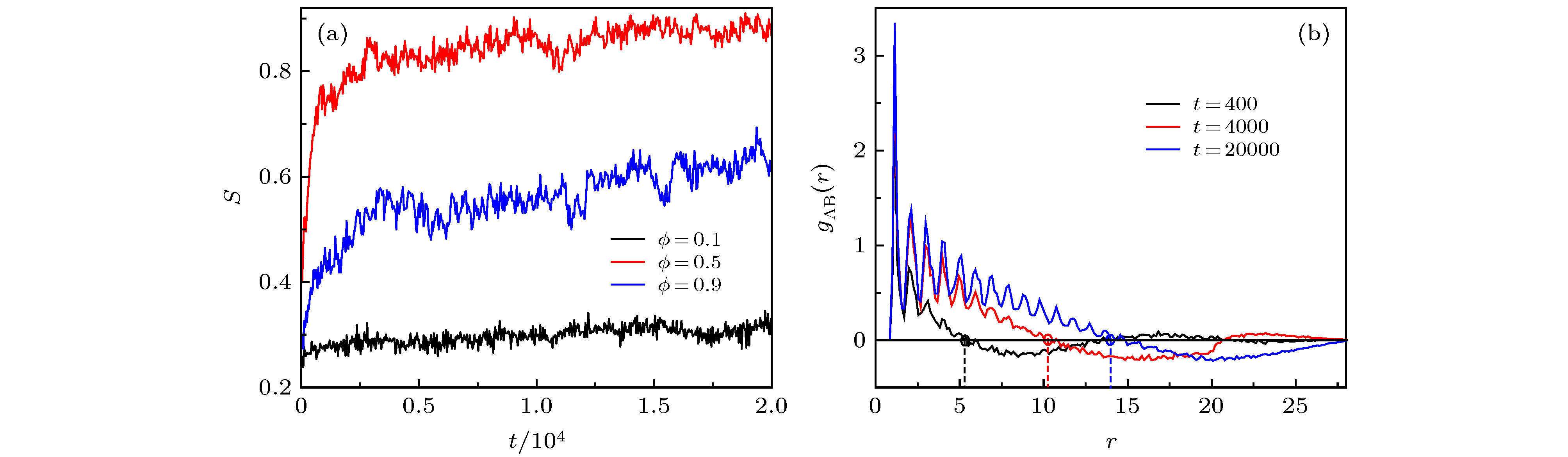 图 10 (a)在不同填充率
图 10 (a)在不同填充率





































































































 图 5 在 (a)
图 5 在 (a) 














































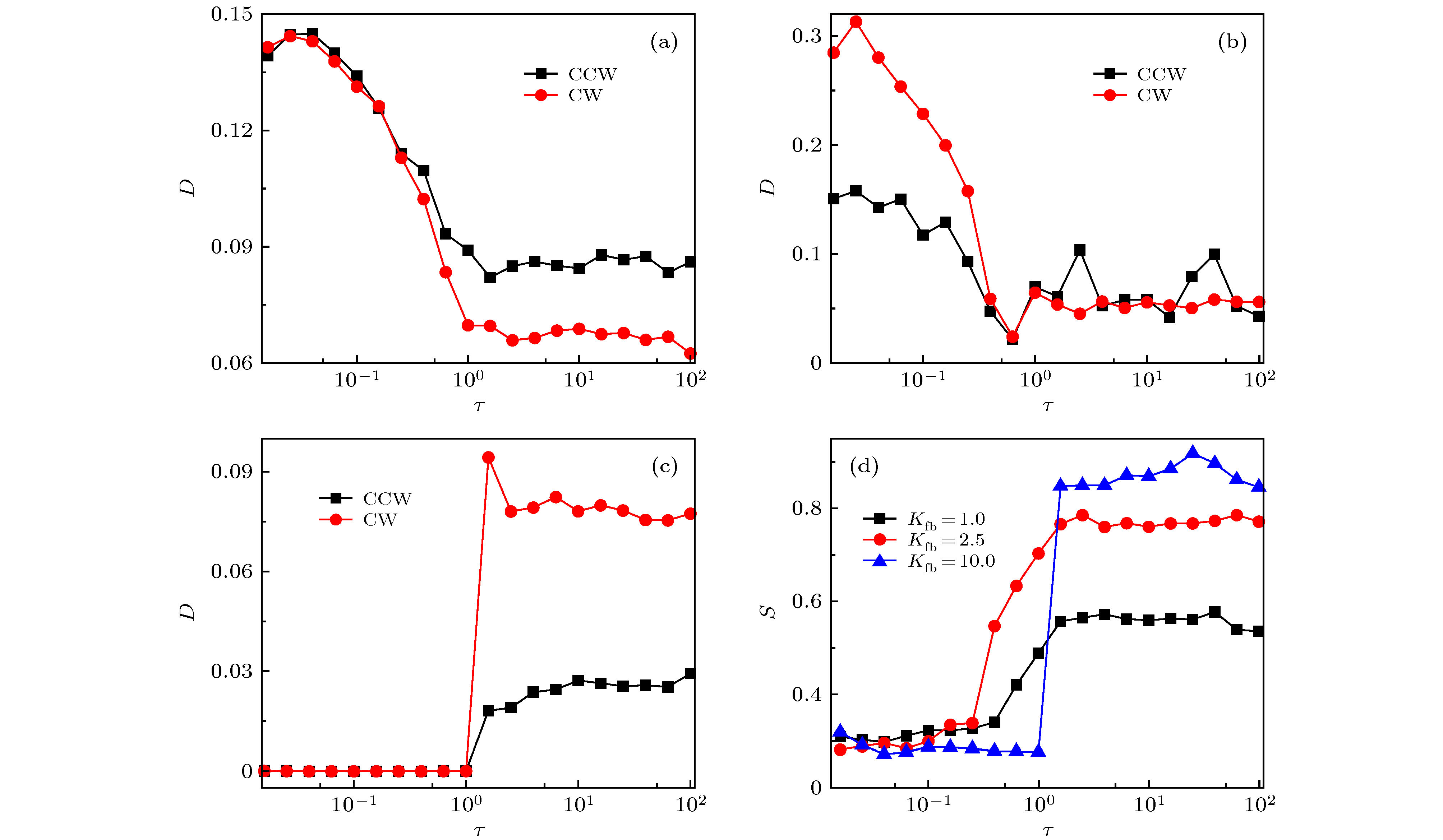 图 6 在(a)
图 6 在(a)





































 图 7 在(a)
图 7 在(a)








































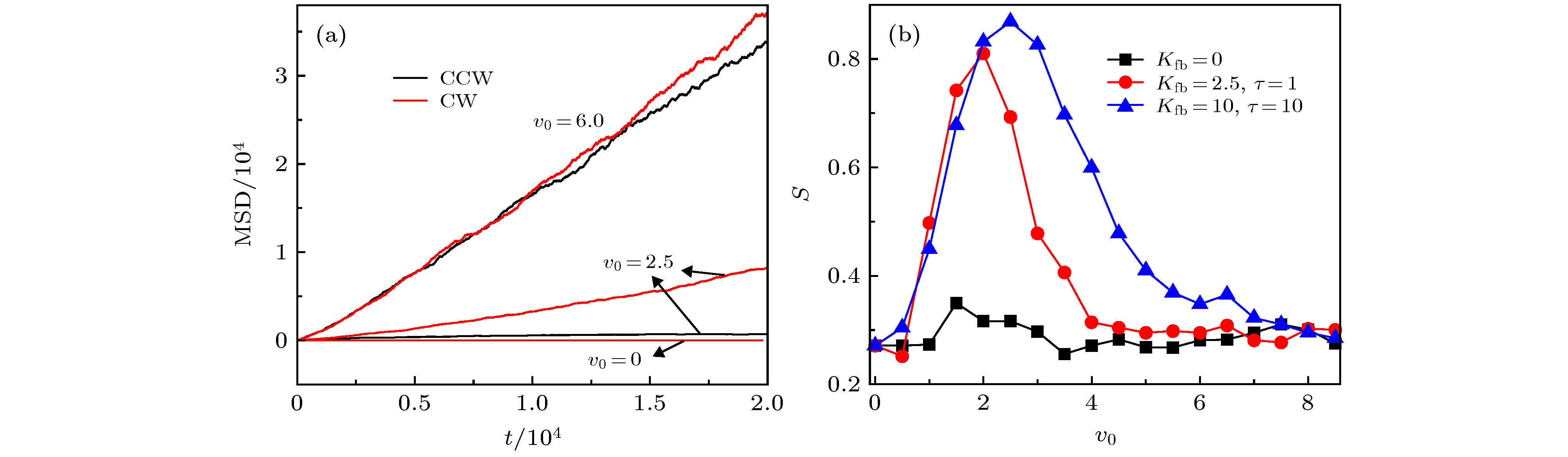 图 8 (a)在
图 8 (a)在
























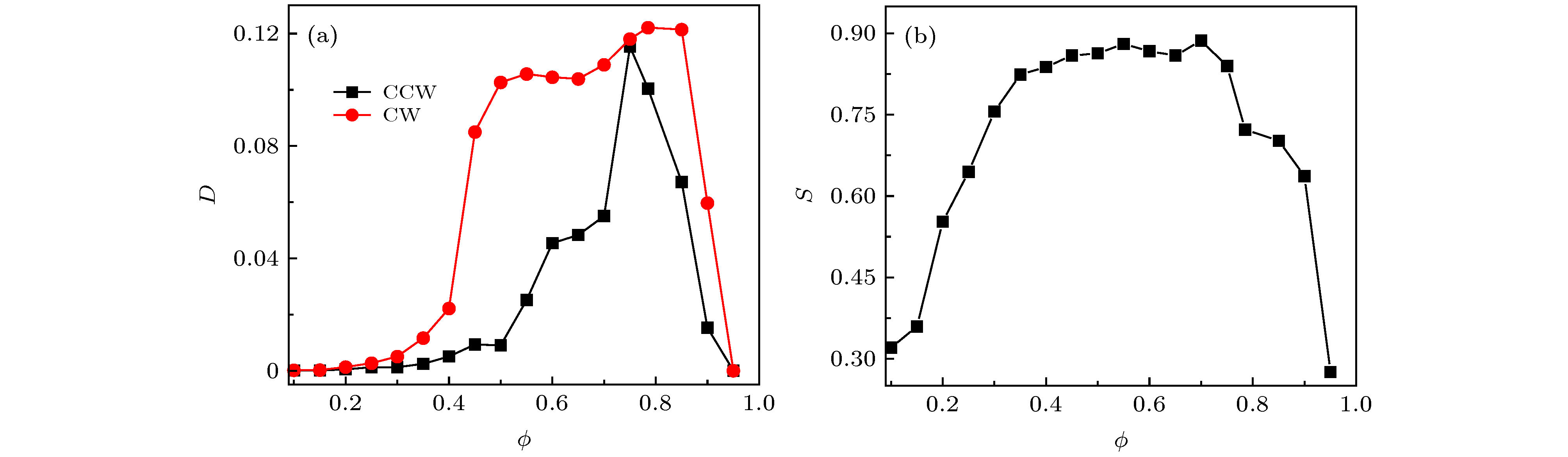 图 9 (a) CCW粒子和CW粒子的有效扩散系数D随填充率
图 9 (a) CCW粒子和CW粒子的有效扩散系数D随填充率



































