1.University of Chinese Academy of Sciences, Beijing 100049, China 2.State Key Laboratory of Acoustics, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China 3.Unit 92578 of the People’s Liberation Army of China, Beijing 100161, China 4.School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710129, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 11434012)
Received Date:29 October 2019
Accepted Date:31 March 2020
Published Online:05 June 2020
Abstract:In the deep ocean environment, the sound energy from the direct path is very hard to illuminate a target located in the shadow zone. To solve the problem, the bottom bouncing technique, in which the vertical transmitting beamforming and the bottom bouncing are used to illuminate the target in the shadow zone, provides a potential way. However, due to the sound field interference in the bottom bouncing area in the deep ocean environment, the sound energy in the bottom bouncing area is fluctuant, which produces several discrete detectable areas. In order to detect underwater targets in these areas when using an active sonar with a transmitting vertical linear array, the selecting of reasonable vertical transmitting beam angles is necessary. Therefore, the relationship between the discrete detectable area and the transmitting vertical angle in deep ocean is very important for the active sonar using a transmitting vertical linear array. In this paper, it is shown that the sound field fluctuation in the bottom bouncing area is due to the energy fluctuation of the rays having different grazing angles. And the active sonar can achieve high noise gain in a detectable area when the vertical transmitting angle is equal to the grazing angle of the sound ray with the peak energy. To obtain a high noise gain of the active sonar using the vertical transmitting array, an efficient method to estimate the grazing angle of sound rays with peak energy according to the sound field distribution of angle dimension is proposed, which is helpful for selecting a group of best vertical transmitting angles. Meanwhile, a transmitting signal which contains a group of subpulses is designed. Furthermore, each subpulse is applied to the whole transmitting array by using the vertical steering to illuminate a certain detectable area in the bottom bouncing area. By doing so, a subpulse steered to the previously selected vertical angle will ensure a high transmitting array gain in a detectable area, and all of pulses will illuminate the whole detectable areas with high array gains almost simultaneously. Numerical simulations show that the proposed method is stable and efficient, and has good noise gain in the shadow zone (where almost no direct path exists) in the deep ocean environment. Keywords:active sonar/ bottom bounce area/ vertical beam pitch/ angle dimension
其中$P(r, {z_0}, {z_r}, \omega )$表示角频率为$\omega $、距离为r、声源深度为${z_0}$和接收深度为${z_r}$时的声压, $\rho ({z_0})$为声源处的介质密度, ${k_{rm}}$和${\psi _m}(z, \omega )$别为简正波的第m阶模态的本征值和本征函数, 且${k_{rm}} = {\mu _m} + {\rm{j}}{\beta _m}$(通常${\mu _m} \gg {\beta _m}$), ${\mu _m}$是简正波的水平波数, ${\beta _m}$是简正波的衰减系数. M为波导中有效传播的简正波模态数. 取声源频率100 Hz, 声源深度为50 m, 海深为5000 m, 在典型深海Munk声道条件下(取混合层深度为0 m, 声道轴深度为1000 m), 计算得到声传播损失随距离和接收深度变化情况如图1所示. 图 1 典型深海Munk声道下声传播损失随距离和接收深度变化情况 Figure1. Transmission loss variety with the change of distance and receiver depth in Munk sound channel.
从图1声传播损失随距离的变化情况看, 深海低频声场存在明显的直达声区、海底反射区和会聚区. 15—60 km为海底反射区和会聚区, 该距离范围内能量呈现明显的亮暗相间变化. 15—50 km的海底反射区包含以17.5, 24.0和35.0 km为中心的3个能量较高的区域; 在57 km附近出现第一会聚区. 将接收深度固定为50 m, 绘制声传播损失随距离的变化曲线如图2所示. 假设声纳优质因数(FOM)为85 dB, 定义FOM大于声传播损失的区域为声纳可探测区, 图2中可明显观察到海底反射区的3个声纳可探测区. 图 2 典型深海Munk声道下接收深度固定时声传播损失随距离的变化 Figure2. Transmission loss variety with the change of distance in Munk sound channel when the receiver depth is fixed.
在图1和图2计算条件下绘制本征声线${\varphi _m}{\text{-}} \left| {{A_m}} \right|$曲线, 如图3所示, 该曲线称为声场的角谱域分布[14], 该分布图可以量化反映不同出射角本征声线能量的变化. 从图3中可以看到, 声线能量在出射角0°—9.5°(对应1—120阶简正波), 9.5°—18.2°(对应121—126阶简正波), 18.2°—27.6° (对应217至314阶简正波)和27.6°—31.7° (对应315至354阶简正波)存在4个周期的起伏变化. 图 3 典型深海Munk声道下声场的角谱域分布 Figure3. Acoustic field distribution of angle dimension in Munk sound channel.
根据声场角谱域分布图将1—120阶(出射角0°—9.5°声线), 121—216阶(出射角9.5°—18.2°声线), 217—314阶(出射角18.2°—27.6°声线), 315—354阶(出射角27.6°—31.7°声线) 4簇简正波(或声线)分别叠加形成声场, 如图4所示. 图 4 不同简正波(声线)簇形成的声场 (a) 1—120阶简正波(出射角0°—9.5°的声线)叠加声场; (b) 121—216阶简正波(出射角9.5°—18.2°的声线)叠加声场; (c) 217—314阶简正波(出射角18.2°—27.6°声线)叠加声场; (d) 315—354阶简正波(出射角27.6°—31.7°声线)叠加声场 Figure4. Acoustic field formed by different normal mode (ray) clusters: (a) Acoustic field formed by normal mode 1 to normal mode 120 (rays with emanating angle from 0° to 9.5°); (b) acoustic field formed by normal mode 121 to normal mode 216 (rays with ema-nating angle from 9.5° to 18.2°); (c) acoustic field formed by normal mode 217 to normal mode 314 (rays with emanating angle from 18.2° to 27.6°); (d) acoustic field formed by normal mode 315 to norm al mode 354 (rays with emanating angle from 27.6° to 31.7°).
下面重点讨论各条件要素对声场角谱域分布结构的影响, 同时采用(11)式中的快变项$\left| {\sin \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$进行分布结构预报的精度. 1)声源频率与声源深度等声阵参数变化对声场角谱域分布结构的影响及预报误差分析 声源频率与声源深度等声阵参数变化时, 主要通过影响快变项$\left| {\sin \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$, 进而影响声线簇角谱域分布结构. 在典型深海Munk声道下(海深5000 m, 声道轴深度1000 m, 混合层深度0 m), 分别取声源频率变化(100, 200和300 Hz)、声源深度变化(30, 50和80 m), 利用WKBZ求解声场的简正波解并绘制声场角谱域分布结构, 和本文的预报结果比较, 如图6和图7所示. 图 6 声源频率变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源深度50 m) (a) 100 Hz; (b) 200 Hz; (c) 300 Hz Figure6. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when source frequency varies (source depth is 50 m): (a) 100 Hz; (b) 200 Hz; (c) 300 Hz.
图 7 声源深度变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源频率100 Hz) (a) 30 m; (b) 50 m; (c) 80 m Figure7. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when source depth varies (source frequency is 100 Hz): (a) 30 m; (b) 50 m; (c) 80 m.
随着声源频率f和声源深度${z_0}$的增大, $\left| {\cos \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$中相邻两个零点距离变小, 出现上述现象. 在设定的水文条件下, 以100 Hz声源为例, 在30, 50和80 m深度上对应的声线临界掠射角分别为10.2°, 10.8°和11.3°, 当声线掠射角大于临界掠射角时, 对应海底反射区声线, 反之则对应会聚区的反转声线. 由图6和图7可得, 预报方法对海底反射区声场角谱域分布结构预报结果与实际仿真结果基本一致(注: 本文方法只预报声线簇的起伏周期、峰值位置、谷值位置等, 不预报相对强度数值). 值得注意的是, 对于小于临界掠射角的会聚区声线簇, 理论预报结果与实际仿真结果存在差异, 这是由(9)式推导(10)式过程中的近似计算引起的. 对于掠射角${\varphi _m}$较小的声线, (9)式$\sqrt {{n^2}\left( z \right) - {{\cos }^2}{\varphi _m}} $项中的${\cos ^2}{\varphi _m}$接近于1, 与${n^2}\left( z \right)$取值接近, 此时$n\left( z \right)$不可再近似为1, 故理论预报结果与实际产生误差. 2)水文条件、海深等外部环境条件变化对声场角谱域分布结构的影响及预报误差分析 从预报公式$\left| {\sin \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$来看, 水文条件变化引起声源处声速值变化, 进而对声场角谱域分布产生影响, 同时, 由于表达式$\left| {\sin \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$忽略了缓变项${\delta _m}$, 水文条件、海深变化还会引起各本征声线振幅变化, 进而对缓变项${\delta _m}$产生影响, 导致本文预报结果可能产生误差. 下面利用WKBZ模型仿真, 绘制外部环境条件变化时的声场角谱域实际分布, 比较其与本文预报结果的差异. 设定声源频率和深度分别为100 Hz, 50 m, 以典型深海Munk声道(海深为5000 m, 声道轴深度为1000 m, 不存在混合层)为基准, 分别令平均主跃层声速梯度从0.01 —0.05 /s变化、声道轴深度在800—1200 m变化、海深在3000—5000 m变化, 利用WKBZ模型仿真绘制声场角谱域分布, 和本文的预报结果(用快变项$\left| {\sin \left( {{\text{π}} f\dfrac{{2{z_0}}}{{{c_0}}}\sin {\varphi _m}} \right)} \right|$预报)比较, 如图8—图10所示. 图 8 声速梯度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a) 不同跃变层声速梯度下声速剖面; (b) 结果比较 Figure8. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when sound velocity gradient varies: (a) Sound velocity profiles when sound velocity gradient varies; (b) comparison of results.
图 9 声道轴深度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同声道轴深度下声速剖面; (b) 结果比较 Figure9. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when channel axis depth varies: (a) Sound velocity profiles when channel axis depth varies; (b) comparison of results.
图 10 海深变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同海深下声速剖面; (b)结果比较 Figure10. Comparison of WKBZ simulation and theoretical prediction about acoustic field distribution of angle dimension when sea depth varies: (a) Sound velocity profiles when sea depth varies; (b) comparison of results.
表1本文方法和传统随机设置波束俯仰角方法阵增益比较数据表 Table1.Array gain comparison data form between method of this article and the method of random setting.
图 13 本文方法和随机设置方法阵增益比较 (a) 不同方法阵增益比较; (b) 声传播损失及声纳可探测区分布情况 Figure13. Array gain comparision between method of this article and the method of random setting: (a) Array gains of different methods; (b) transmission loss and distribution of detectable areas.











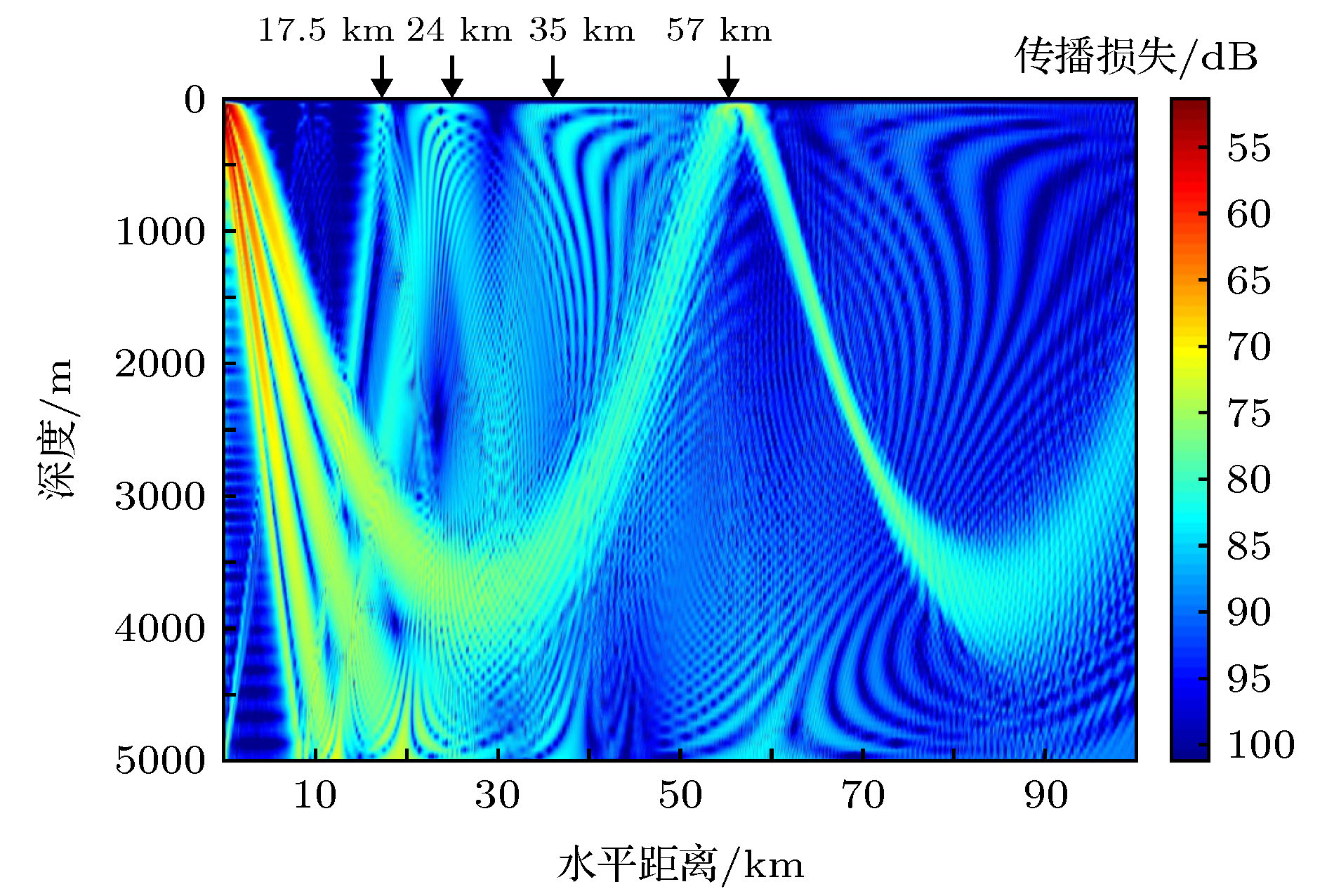 图 1 典型深海Munk声道下声传播损失随距离和接收深度变化情况
图 1 典型深海Munk声道下声传播损失随距离和接收深度变化情况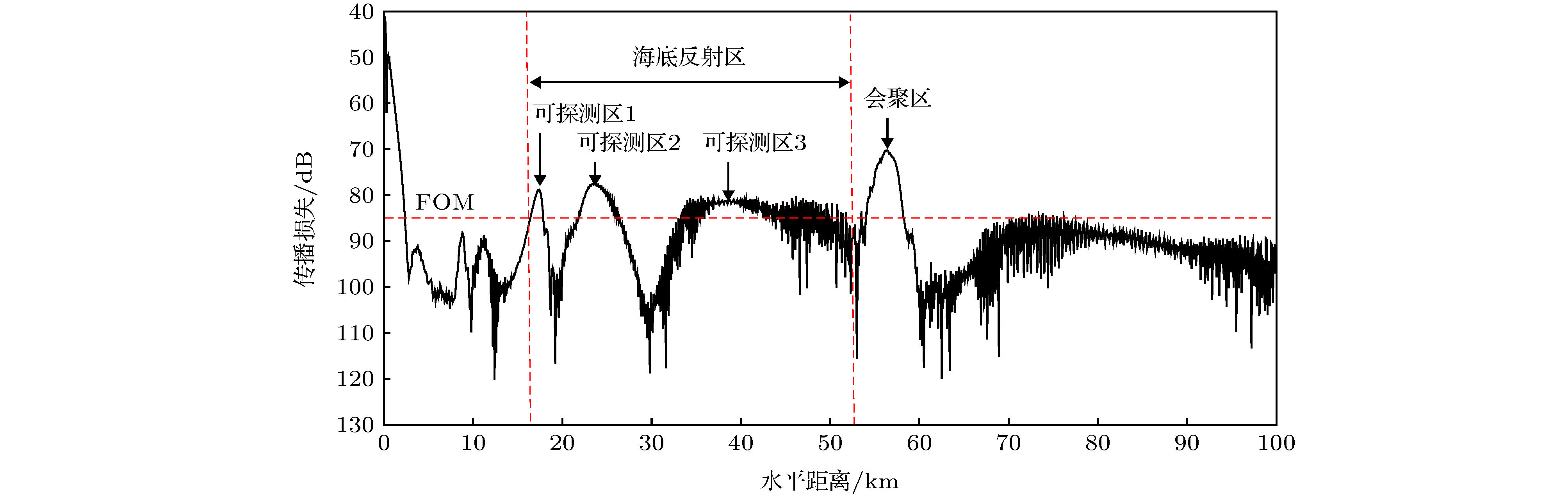 图 2 典型深海Munk声道下接收深度固定时声传播损失随距离的变化
图 2 典型深海Munk声道下接收深度固定时声传播损失随距离的变化








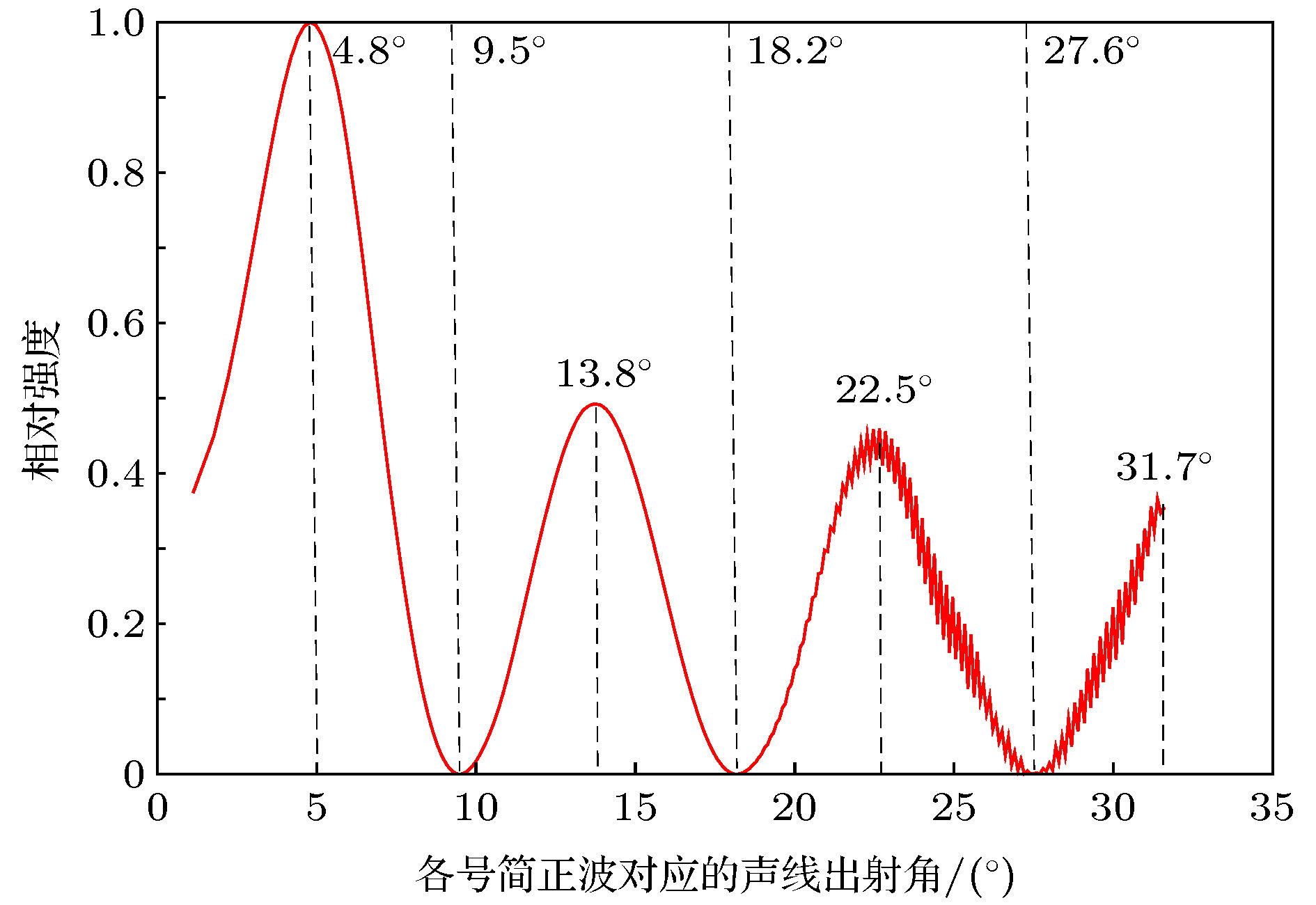 图 3 典型深海Munk声道下声场的角谱域分布
图 3 典型深海Munk声道下声场的角谱域分布 图 4 不同简正波(声线)簇形成的声场 (a) 1—120阶简正波(出射角0°—9.5°的声线)叠加声场; (b) 121—216阶简正波(出射角9.5°—18.2°的声线)叠加声场; (c) 217—314阶简正波(出射角18.2°—27.6°声线)叠加声场; (d) 315—354阶简正波(出射角27.6°—31.7°声线)叠加声场
图 4 不同简正波(声线)簇形成的声场 (a) 1—120阶简正波(出射角0°—9.5°的声线)叠加声场; (b) 121—216阶简正波(出射角9.5°—18.2°的声线)叠加声场; (c) 217—314阶简正波(出射角18.2°—27.6°声线)叠加声场; (d) 315—354阶简正波(出射角27.6°—31.7°声线)叠加声场






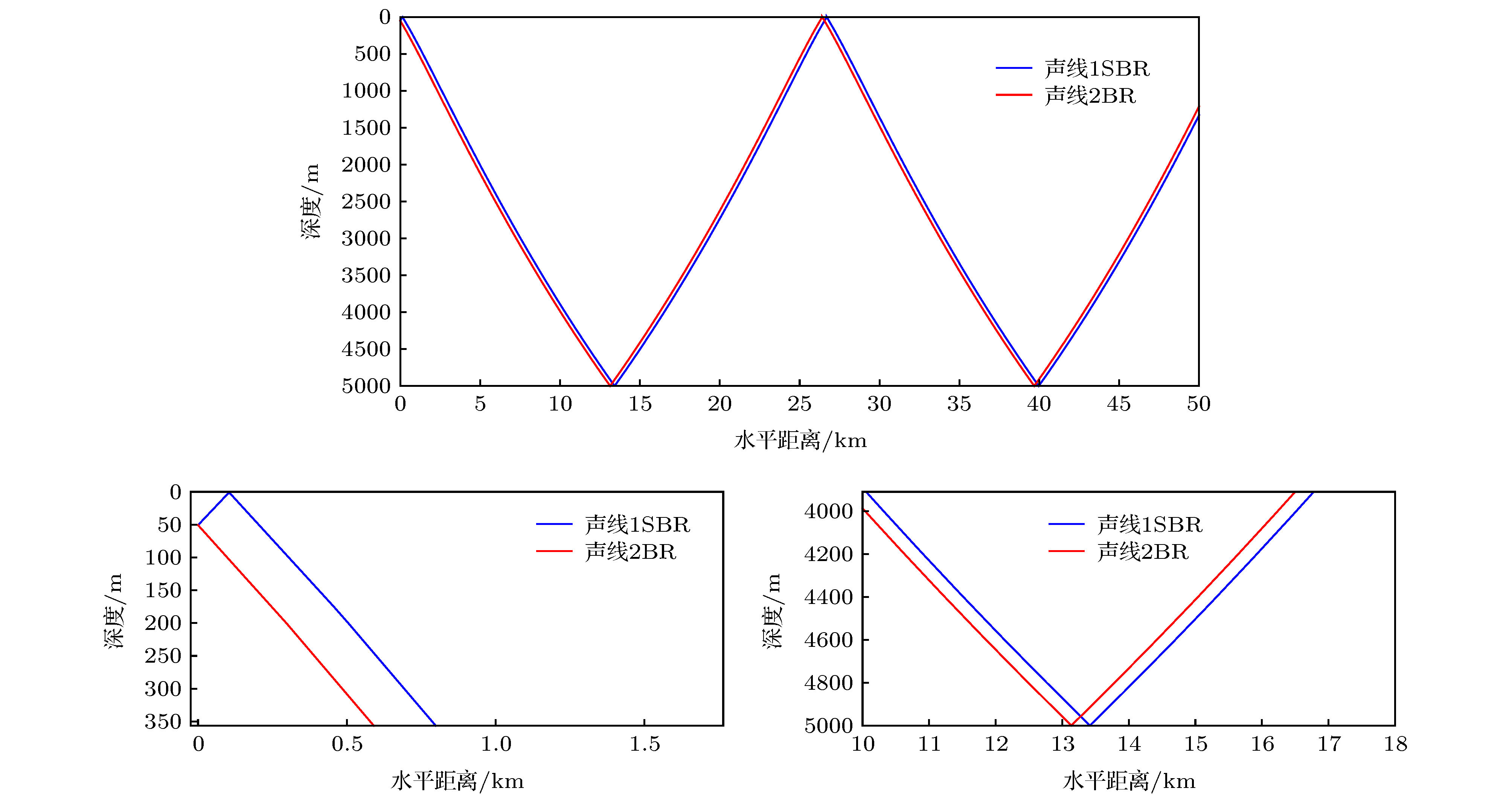 图 5 角谱域上20°掠射角对应的两种声线示意图
图 5 角谱域上20°掠射角对应的两种声线示意图




































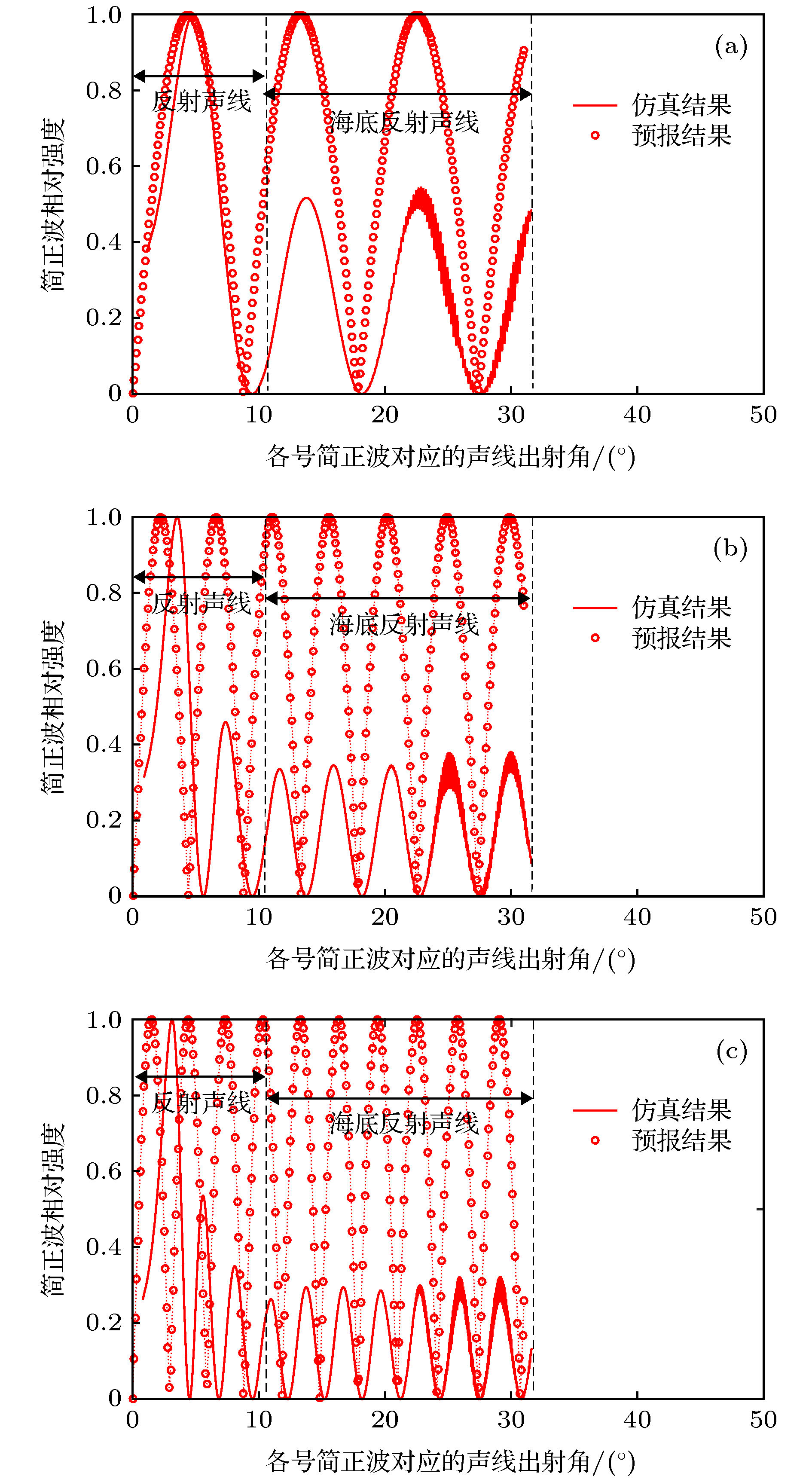 图 6 声源频率变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源深度50 m) (a) 100 Hz; (b) 200 Hz; (c) 300 Hz
图 6 声源频率变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源深度50 m) (a) 100 Hz; (b) 200 Hz; (c) 300 Hz 图 7 声源深度变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源频率100 Hz) (a) 30 m; (b) 50 m; (c) 80 m
图 7 声源深度变化时声场角谱域分布WKBZ仿真结果与理论预报结果比较(声源频率100 Hz) (a) 30 m; (b) 50 m; (c) 80 m














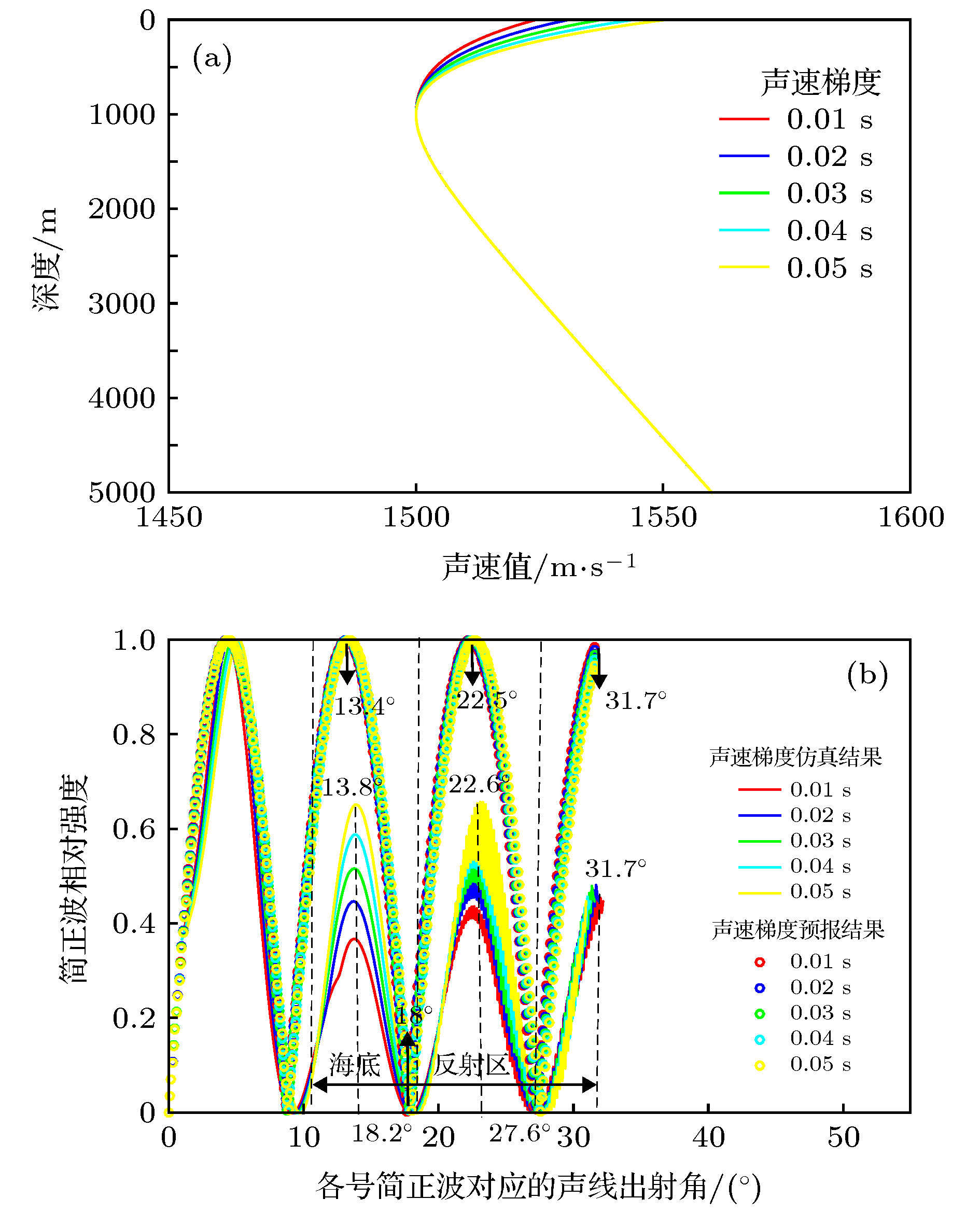 图 8 声速梯度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a) 不同跃变层声速梯度下声速剖面; (b) 结果比较
图 8 声速梯度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a) 不同跃变层声速梯度下声速剖面; (b) 结果比较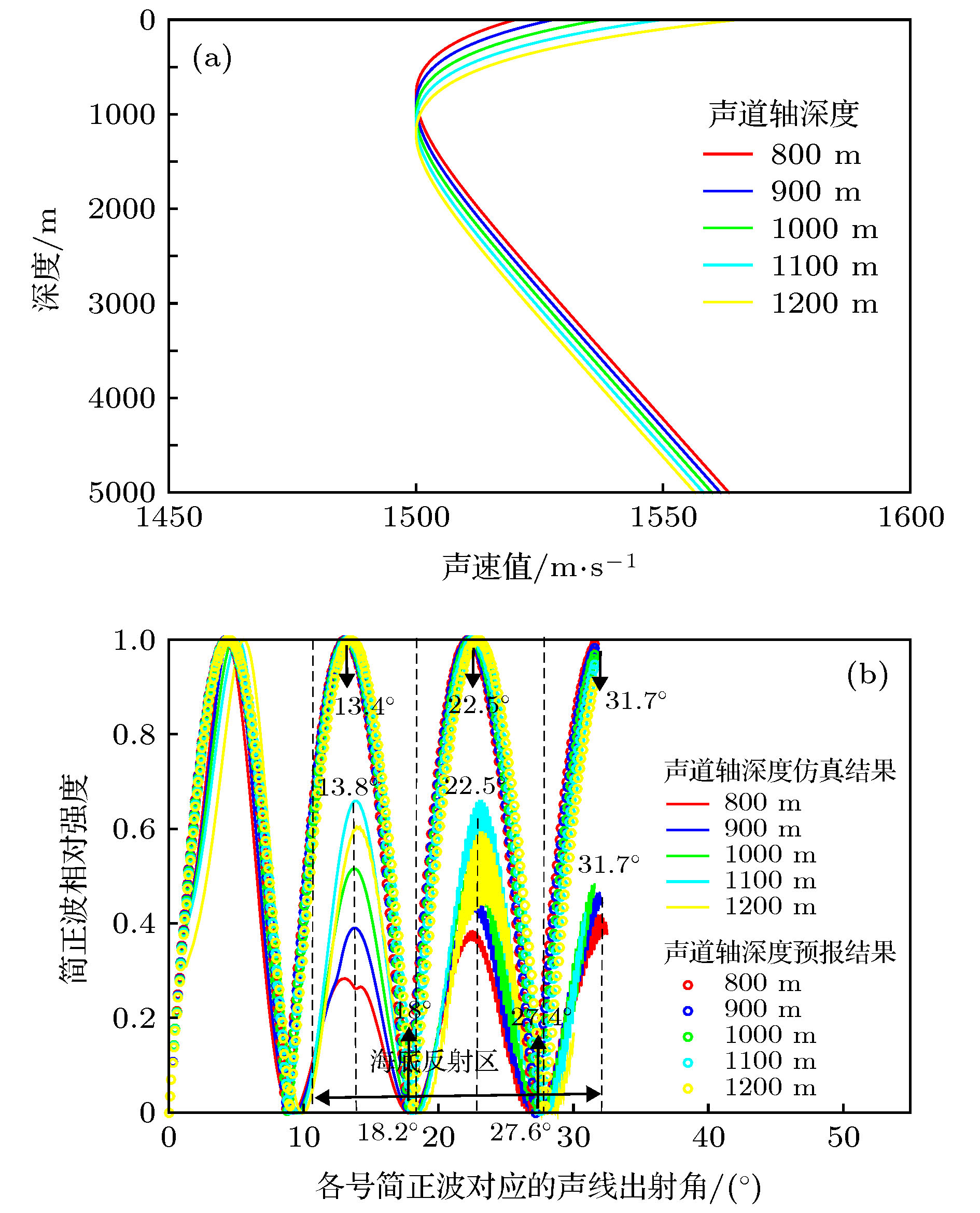 图 9 声道轴深度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同声道轴深度下声速剖面; (b) 结果比较
图 9 声道轴深度变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同声道轴深度下声速剖面; (b) 结果比较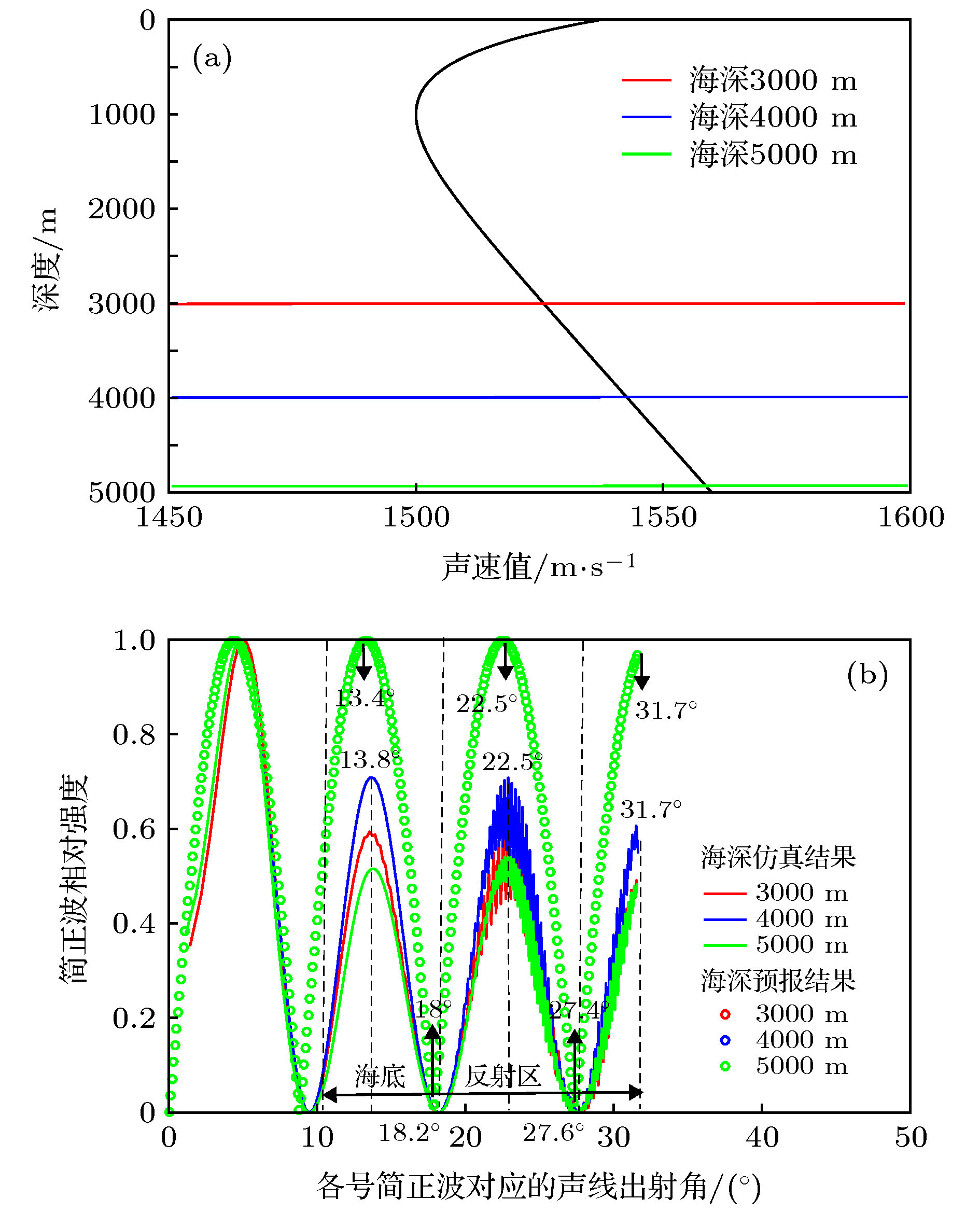 图 10 海深变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同海深下声速剖面; (b)结果比较
图 10 海深变化时声场角谱域分布WKBZ仿真结果和理论预报结果比较 (a)不同海深下声速剖面; (b)结果比较




























 图 11 基于声场角谱域分布结构的主动声纳发射脉冲串信号设计
图 11 基于声场角谱域分布结构的主动声纳发射脉冲串信号设计
 图 12 声场角谱域分布结构
图 12 声场角谱域分布结构 图 13 本文方法和随机设置方法阵增益比较 (a) 不同方法阵增益比较; (b) 声传播损失及声纳可探测区分布情况
图 13 本文方法和随机设置方法阵增益比较 (a) 不同方法阵增益比较; (b) 声传播损失及声纳可探测区分布情况






























