1.School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China 2.Key Laboratory of Ocean Acoustics and Sensing Ministry of Industry and Information Technology, Xi’an 710072, China 3.State Key Laboratory of Acoustics, Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China
Fund Project:Project supported by the Key Program of the National Natural Science Foundation of China (Grant No. 11534009), the National Natural Science Foundation of China (Grant No. 51479169), and the Opening Project of State Key Laboratory of Acoustics (Grant No. SKLA201702).
Received Date:13 January 2019
Accepted Date:30 May 2019
Available Online:01 September 2019
Published Online:05 September 2019
Abstract:In this paper, two generalized likelihood ratio (GLR) detectors are presented for the case of multiple snapshots of test data to detect the presence of an underwater acoustic source in the deep ocean. The two GLR detectors are termed the eigenvalue detector (EVD) and the constant false alarm rate eigenvalue detector (CFAR EVD), respectively. Theoretical analysis and numerical results show that for a given input signal-to-noise ratio (SNR) of the array, the GLR detectors achieve higher output SNRs when the spatial dimension of test data decreases. To further enhance the detection performances of the GLR detectors, we propose a dimension-reduced (DR-GLR) method based on array sampling of modal information. This DR-GLR method combines the characteristics of sound propagation and array receiving. According to normal mode theory, acoustic signals emitted from the acoustic source lie in the modal space spanned by the sampled modal information of the array. Resulting from the restriction of the array size, it often occurs in deep ocean when the dimension of " effective modal subspace” is less than that of the test data which is equivalent to the number of hydrophones. Based on this phenomenon, we reconstruct the modal information by merely retaining the " effective modal subspace” to formulate the dimension reduction matrix. The DR-GLR test statistics is deduced by employing the dimension reduction matrix when using the vertical linear array (VLA) and the horizontal linear array (HLA), respectively. The DR-GLR detectors when using an HLA require more computational amount than when using a VLA. Simulation experiments are conducted to analyze the detection performances of the two GLR detectors, and verify the performance improvement effects of DR-GLR detectors. The numerical results show that the CFAR EVD presents good robustness to the uncertainty of the noise power and the DR-GLR detectors outperform the GLR detectors in detection performance. It also turns out the acoustic signals received by the HLA lie in a lower-dimensional " effective modal subspace” than by the VLA, and thus when using an HLA the DR-GLR detectors present higher detection probabilities than using a VLA. Moreover, the smaller the dimension of the " effective modal subspace”, the better the performance improvement of the DR-GLR detectors will be. The dimension of the " effective modal subspace” increases with hydrophone spacing and/or the source frequency increasing. Keywords:deep-ocean waveguide/ generalized likelihood ratio/ effective modal space/ dimension reduction
将相应的检测器记为DR-CEVD. 我们给出了DR-GLR检测的算法实现流程图, 如图2所示. 经过降维处理, 接收数据的空间维度由N减小为$M_0$, 且信号能量几乎没有损失, 即信噪比几乎保持不变, 因此DR-GLR检测器将获得更好的检测性能. 图 2 使用VLA时DR-GLR检测器的算法流程图 Figure2. The flow diagrams of the DR-GLR detectors when using a VLA
24.2.基于HLA采样简正波模态信息的降维处理 -->
4.2.基于HLA采样简正波模态信息的降维处理
当接收阵为HLA时, 声源相对于HLA的位置参数除了深度和水平距离, 还有水平方位角. 这里假设声源相对于HLA的水平方位角为$\theta$(如图3所示), 以第一个阵元为参考阵元, 利用(19)式, 声传递函数可写为模态矩阵与模态系数相乘的形式 图 3 水平阵声源信号入射方位 Figure3. The arrival angle of acoustic signal on the HLA.
考虑接收数据的空间维度对GLR检测器的检测性能的影响, 给出了不同阵元数下检测概率随信噪比变化的曲线, 如图9所示. 由图9可知, 随着阵元数增多, 接收数据的空间维度增大, EVD和CEVD的检测概率都明显下降, 这与前文中EVD的输出信噪比随数据维度增大而减小的情况相一致, 同时也验证了通过降维处理改善GLR检测器检测性能的可行性. 图9中的对比结果是在相同信噪比情况下获得的, 并不是说缩减阵元个数可以提高GLR检测器的检测概率. 若缩减阵元数使信噪比明显下降, 则有可能导致检测概率下降. 图 9 不同数据维度下的检测概率曲线对比, 快拍数$L = 40$ (a) EVD; (b) CEVD Figure9. Probability of detection curves with various spatial dimension: (a) EVD; (b) CEVD.
25.2.降维处理对GLR检测器的性能提升 -->
5.2.降维处理对GLR检测器的性能提升
分别考虑使用VLA和HLA时DR-GLR检测器的检测性能. 设置VLA初始深度为100 m (最靠近海面的阵元深度), 水平距离为30 km; HLA深度为100 m, 声源距HLA一号阵元的水平距离为30 km, 水平方位角$\theta = 10^{\circ}$; 其他参数同上. 该频率声源总共激发了490阶简正波, 使用VLA和HLA采集的各阶模态信息和模态矩阵归一化的奇异值分布如图10所示. 由图10(a)和图10(c)可知, VLA和HLA采集到迥然不同的模态信息, 分别是驻波信息和行波信息, 且各阶模态信息形成了明显的干涉条纹, 表明各阶模态之间存在相关性, 以及模态采样矩阵包含冗余信息. 由图10(b)和图10(d)可知, 模态矩阵存在一部分极小奇异值, 这部分极小奇异值对应了冗余模态信息张成的空间, 利用(24)式计算可得VLA和HLA降维矩阵的维度$M_0$分别为18和5. 因此可以发现, HLA采样模态信息具有更强的冗余性, 有效模态空间维度更小. 这意味着对于相同孔径的阵列, 由于HLA采样的行波信息之间具有更强的相关性, 其接收信号声场事实上位于更低维的有效模态空间, 图 10 阵列采样模态信息及相应模态矩阵的奇异值 (a) VLA采样的各阶模态; (b) VLA; 归一化的各阶奇异值分布; (c) HLA采样的各阶模态; (d) HLA, 归一化的各阶奇异值分布 Figure10. Modal information sampled on the array and singular values of corresponding mode matrices: (a) Various modes sampled on the VLA; (b) normalized singular values associated with the VLA; (c) various modes sampled on the HLA; (d) normalized singular values associated with the HLA.
图11给出了噪声功率已知情况下, 使用VLA和HLA时DR-GLR检测器的检测概率曲线, 快拍数$L = 20$. 为便于对比, 图中也给出了GLR检测器的检测概率曲线. 记检测概率达到0.5所需的信噪比为检测器的信噪比门限. 对于VLA, DR-EVD和DR-CEVD的信噪比门限相较于EVD和CEVD分别降低了0.9 和1.3 dB; 对于HLA, 相较于EVD和CEVD, DR-EVD和DR-CEVD的信噪比门限分别有2.1 和2.6 dB的下降. 由于利用采样简正波模态信息对接收数据进行了降维处理, 使得GLR检测在更低维的空间进行, 因而GLR检测器的检测性能获得明显的提高. HLA采样的行波信息冗余性更强, 有效模态空间维度更小, 因此该条件下使用HLA时DR-GLR获得更好的检测性能改善效果. 图 11 不同信噪比下的检测概率曲线对比, 快拍数$L = 20$ (a) VLA; (b) HLA Figure11. Probability of detection curves of different detectors, snapshot number $L = 20$: (a) VLA; (b) HLA.
图12给出了噪声功率不确定情况下使用VLA和HLA时DR-GLR检测器的检测性能表现. 与未降维的结果一致, DR-EVD的检测性能随噪声功率不确定度的增大而下降, 而由于降维后的DR-CEVD仍为CFAR检测器, DR-CEVD的检测性能与噪声功率不确定度无关, 表现出对噪声不确定性的稳健性, 同时这种稳健性对于VLA和HLA都成立, 因此在非平稳的噪声环境中, 噪声功率难以估计时DR-CEVD是更佳的选择. 图 12 噪声功率不确定, 不同信噪比下检测概率曲线对比, 快拍数$L = 40$ (a) VLA; (b) HLA Figure12. Probability of detection curves of different detectors when noise power is uncertain, snapshot number $L = 40$: (a) VLA; (b) HLA.
25.3.采样模态信息及其对降维程度的影响 -->
5.3.采样模态信息及其对降维程度的影响
阵列采样模态信息的“丰富程度”决定了阵列接收声场的有效模态空间维度, 进而影响了降维程度, 图13中给出了声源激发的各阶简正波模态函数幅值在波导深度上的变化和各阶水平波数分布, 其中阵元数为30, 声源频率为150 Hz, 水平方位角$\theta = 0^{\circ}$. 由图13(a)可知, 接近海面和海底时模态函数幅值为零的阶次较多, 因此当阵列位于靠近海面或者海底位置时, 冗余模态信息增多, 降维程度将会加强. 由图13(b)可知, 各阶水平波数在数值上非常接近, 这使得HLA采样的各阶模态, 也就是各方向向量之间具有强相关性. 因此相较于VLA, HLA的模态矩阵包含着更多冗余信息, 有效模态空间维度更小, 降维程度更强 (如图10(b)和(d)所示). 图 13 声源激发的各阶简正波模态函数和水平波数 (a)各阶模态函数幅值随波导深度的变化; (b)各阶水平波数分布 Figure13. Modal functions and horizontal wavenumber of various normal modes excited by the acoustic source: (a) Modal functions along with various depths; (b) distribution of various horizontal wavenumbers.
阵列配置和声源频率是影响阵列采样模态信息的两个重要因素, 前者决定了阵列采样模态信息的结构特征, 后者决定了模态采样信息的阶数, 进而影响降维程度. 首先考虑阵列配置对阵列采样模态信息的影响, 这里阵列配置是指阵元间距与布放深度. 给出了降维系数随阵元间距和阵列深度的变化曲线, 如图14所示, 仿真参数同上. 由图14(a)可知, 降维系数随阵元间距的增大而减小, 这是因为阵列孔径增大时采集到更大尺度上的模态信息, 模态信息的“丰富程度”加强, 各阶模态之间的相关性下降, 有效模态空间维度增大, 降维程度相应减弱; 同时在减小速度上VLA远快于HLA, 这与图13(b)的分析结果一致. 由图14(b)可知, 阵列深度改变时降维系数变化幅度不大, 这是因为阵列采样的模态信息的总量变化不大, 同时观察到阵列深度接近海面或海底时降维系数较大, 这与图13(a)的分析结果一致. 需要指出的是, 这里仅讨论了阵列配置对降维程度的影响, 实际当中的阵列配置还要考虑分辨率、传播损失等因素, 并不意味着阵元间距越小越好. 图 14 阵列配置对降维程度的影响, $N = 40$ (a) 阵列深度100 m; (b) 阵元间距4 m Figure14. The influence of array configuration on the degree of dimension reduction, $N = 40$: (a) Array depth of 100 m; (b) hydrophone spacing of 4 m.
声源频率决定了声源激发模态阶数多少, 当声源频率增大时, 波导中传播的模态数目增多, 进而阵列采样模态信息的“丰富程度”加强, 有效模态空间维度增大. 图15给出了降维系数随声源频率的变化曲线, 其中阵列深度为200 m, 可以看出当声源频率增大时, 降维系数减小. 当频率增大到一定值时(如频率为400 Hz, VLA, d = 4 m), 降维系数减为零, DR-GLR不再具有降维的作用. 图 15 降维系数随声源频率的变化曲线 Figure15. The dimension reduction coefficient varying with increasing frequency.




















































 图 1 EVD的输出信噪比随接收数据快拍数和空间维度的变化曲线,
图 1 EVD的输出信噪比随接收数据快拍数和空间维度的变化曲线, 










































 图 2 使用VLA时DR-GLR检测器的算法流程图
图 2 使用VLA时DR-GLR检测器的算法流程图
 图 3 水平阵声源信号入射方位
图 3 水平阵声源信号入射方位








 图 4 使用HLA时DR-GLR检测器的算法流程图
图 4 使用HLA时DR-GLR检测器的算法流程图





 图 5 深海波导及相关环境参数
图 5 深海波导及相关环境参数 图 6 深海声速剖面
图 6 深海声速剖面


 图 7 不同信噪比下检测概率曲线比较,
图 7 不同信噪比下检测概率曲线比较, 

















 图 8 噪声功率不确定, 不同信噪比下检测概率曲线比较 (a)
图 8 噪声功率不确定, 不同信噪比下检测概率曲线比较 (a)



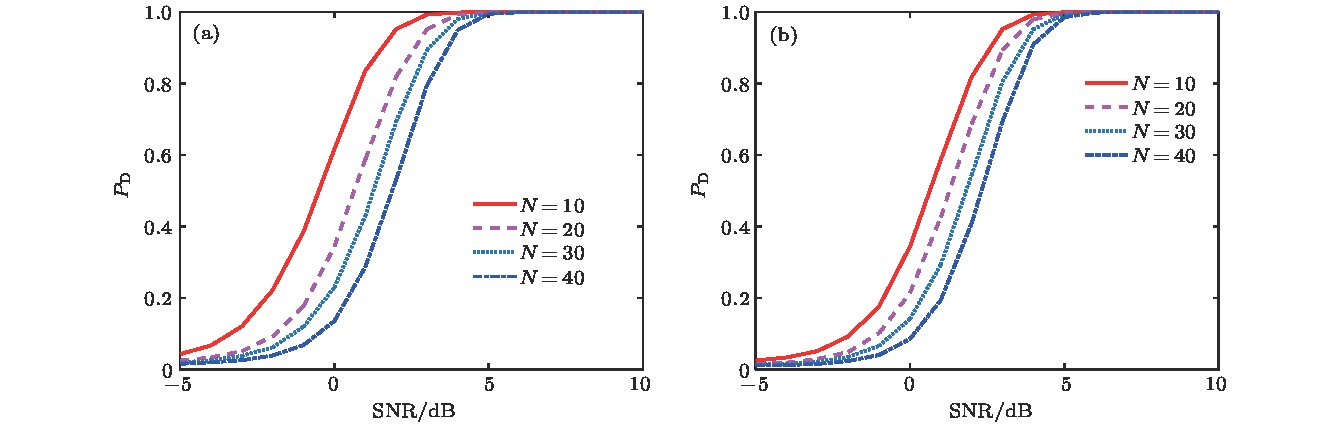 图 9 不同数据维度下的检测概率曲线对比, 快拍数
图 9 不同数据维度下的检测概率曲线对比, 快拍数


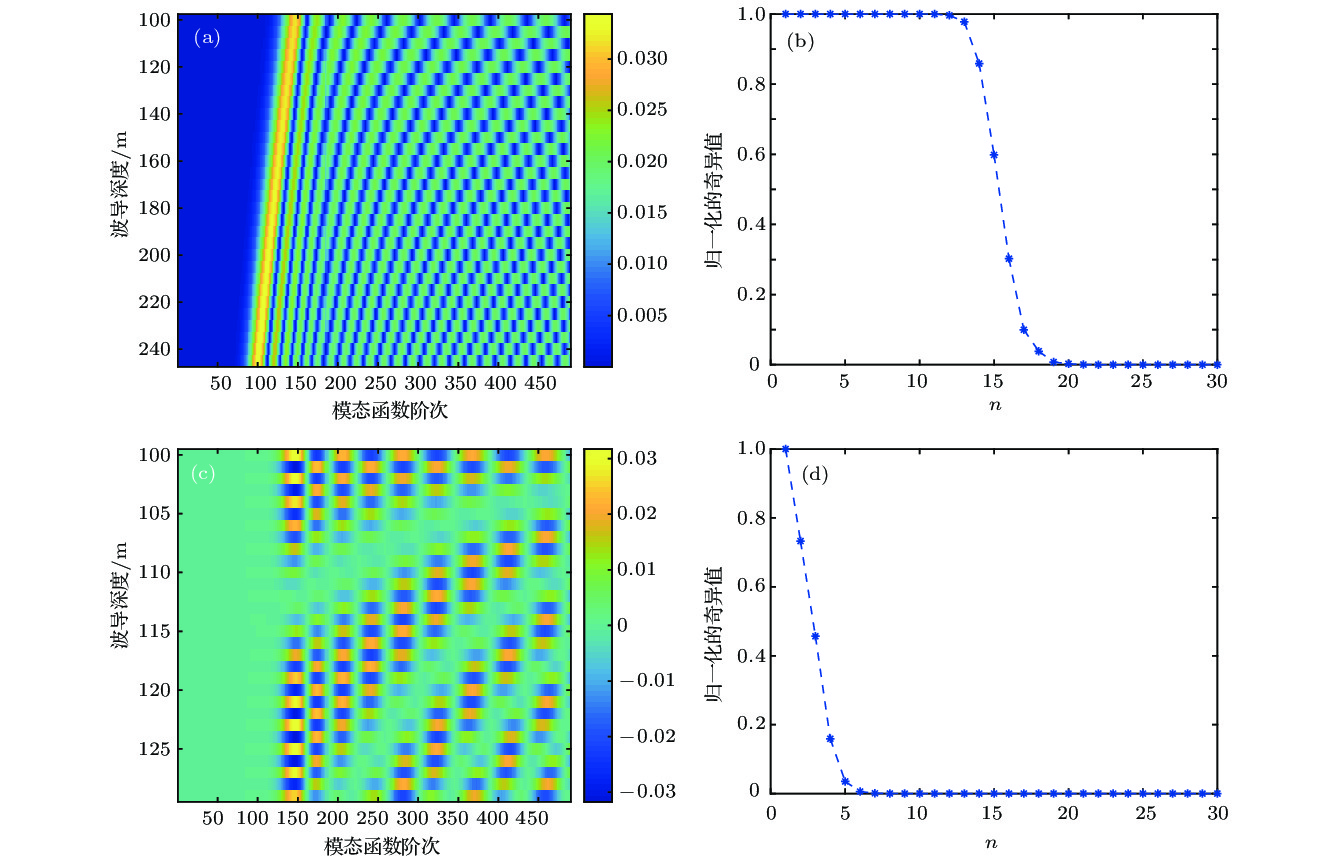 图 10 阵列采样模态信息及相应模态矩阵的奇异值 (a) VLA采样的各阶模态; (b) VLA; 归一化的各阶奇异值分布; (c) HLA采样的各阶模态; (d) HLA, 归一化的各阶奇异值分布
图 10 阵列采样模态信息及相应模态矩阵的奇异值 (a) VLA采样的各阶模态; (b) VLA; 归一化的各阶奇异值分布; (c) HLA采样的各阶模态; (d) HLA, 归一化的各阶奇异值分布
 图 11 不同信噪比下的检测概率曲线对比, 快拍数
图 11 不同信噪比下的检测概率曲线对比, 快拍数

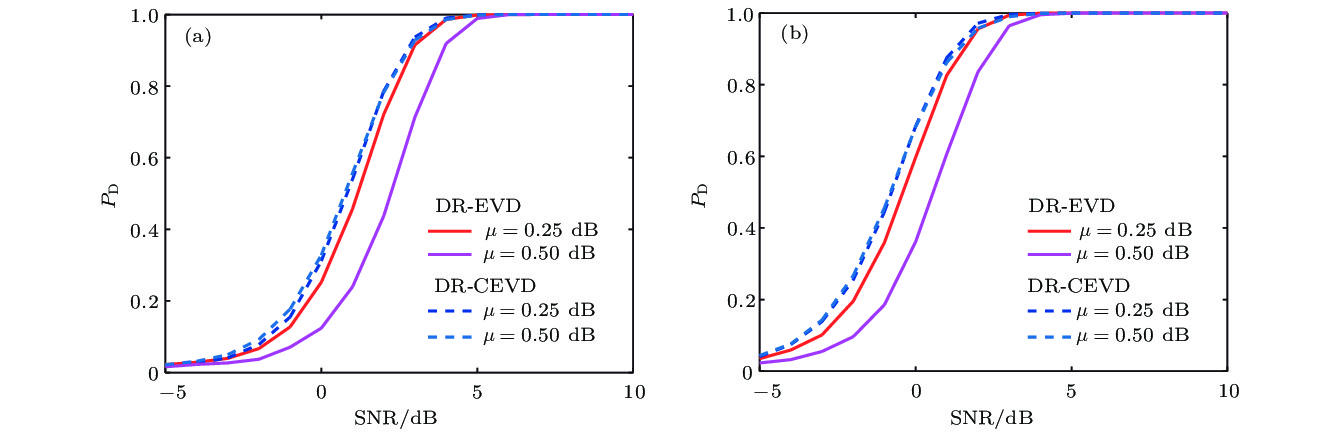 图 12 噪声功率不确定, 不同信噪比下检测概率曲线对比, 快拍数
图 12 噪声功率不确定, 不同信噪比下检测概率曲线对比, 快拍数


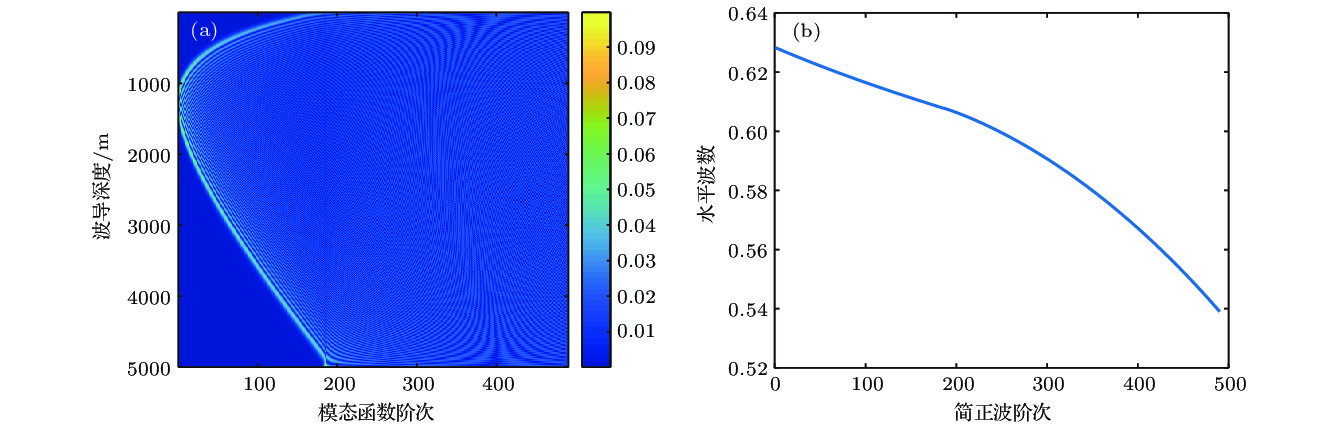 图 13 声源激发的各阶简正波模态函数和水平波数 (a)各阶模态函数幅值随波导深度的变化; (b)各阶水平波数分布
图 13 声源激发的各阶简正波模态函数和水平波数 (a)各阶模态函数幅值随波导深度的变化; (b)各阶水平波数分布 图 14 阵列配置对降维程度的影响,
图 14 阵列配置对降维程度的影响, 

 图 15 降维系数随声源频率的变化曲线
图 15 降维系数随声源频率的变化曲线