引 言
随着海洋战略地位日益凸显, 围绕海洋来展开深海环境探索, 资源开发以及武器装备研发变得日趋重要, 未来海洋将会是世界各国科技实力角逐的重要战场. 相比于空气, 水的高黏度流体特性带来的巨大阻力严重制约水下航行体的航速和机动性能, 通气空泡减阻技术能实现高效的水下减阻, 在水下发射、超高速跨介质导弹等领域极具应用前景.
近年来水下动力技术逐渐成为一个新的研究热点问题, 相较于空气, 一方面水中压力会阻碍气体膨胀, 喷管出口处形成很高的背压; 另一方面, 在水气巨大的速度差形成的强剪切影响下, 导致压力振荡, 喷管出口环境很不稳定[1-2]. 针对水下背压高的问题, 可以通过提高发动机燃烧室的压比, 设计喷管出口为过膨胀状态来解决[3]. 而喷管出口压力振荡的问题还未有行之有效的办法, 降低出口压力脉动至可控范围内于工程实践具有重要意义.
水下射流流体特性研究进展, 主要包括Shi等[4-5]在静水塔中开展了超音速气体射流实验, 结果显示压力脉动的频率和喷管内激波振荡相关联. Han等[6]利用一个实验室尺度的固体火箭发动机在水下开展了推力测试实验, 得出喷管出口处气泡增长和脱落是导致压力脉动的主要原因. 唐云龙等[7]在VOF模型基础上通过添加相变源项, 建立了考虑相变的可压多相流数值方法, 并模拟了水下固体火箭发动机产生的高温燃气射流. Fronzeo和Kinzel[8]通过数值仿真研究了不同密度液流环境下气体射流的演化过程. 许昊等[9]通过水洞实验研究了水流速度对尾喷气体射流的影响, 对比分析有无水流速度两种情况下, 剪切作用差异带来的气体射流形态演化过程与压力脉动特性的变化. Xiang等[10]考虑了深水环境条件下, 过膨胀气体射流的流动结构和演化过程.
尾喷管出口处的环境, 对发动机参数设计来说如此重要, 是否可以从流动控制的角度去改善出口压力振荡的问题. 张孝石等[11]在实验中观察到气体射流直接喷在水中和有空泡包裹前提下喷到水中, 两者形态存在很大差异. Zhang等[12]研究了水下气体射流诱导产生的尾空泡问题, 并分析了不同类型诱导尾空泡转变条件. 王晓辉等[13]研究了火箭发动机在尾空泡内点火过程, 尾空泡的存在有效降低了燃气射流建立初期形成的极高冲击压力, 但是尾空泡内仍然存在剧烈的压力振荡, 从而引起发动机的推力不稳定.
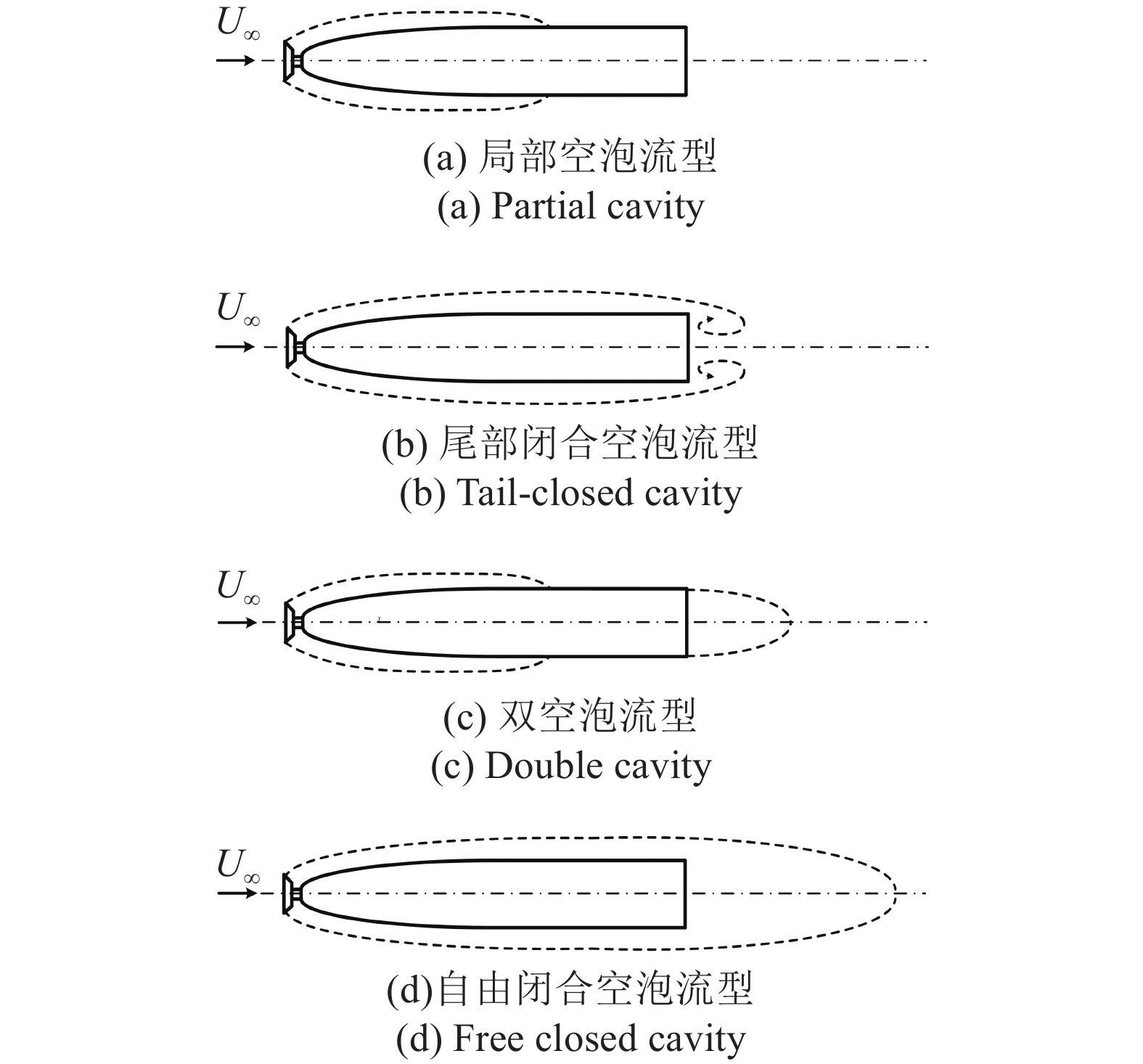
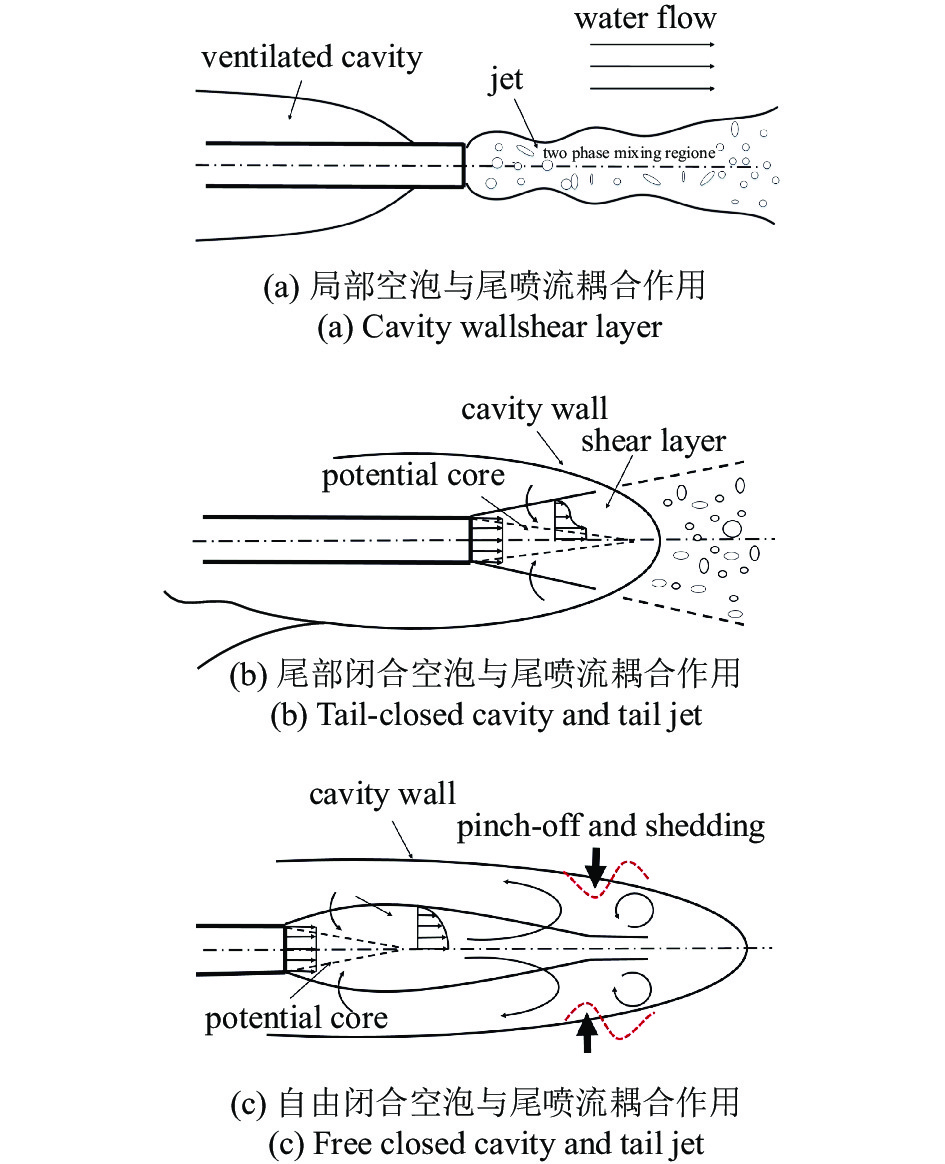
超空泡航行体表面存在4种基本空泡流型, 如图1所示. 局部空泡流型、尾部闭合空泡流型、双空泡流型、自由闭合空泡流型. 不同的空泡流型导致空泡射流耦合流场结构发生变化, 如图2所示. 特别是第3种, 通气空泡包裹整个尾流场的情况, 空泡是否可以为火箭发动机提供稳定的工作环境, 是否可以形成气幕来降低发动机所产生的噪音, 这是非常值得研究的问题. 要达到上述目的, 前提就是要维持空泡形态的稳定性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
航行体空泡的4种基本流型
Figure
1.
Four basic flow patterns of cavitation
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
通气空泡与射流耦合流场结构
Figure
2.
The flow field structure of jet/cavity interaction
下载: 全尺寸图片
幻灯片
水下射流流体特性和空泡演化过程紧密耦合, 相关研究表明高温、高速气流直接作用于空泡内流场和空泡界面, 可引起空泡界面波动甚至断裂. Paryshev[14]结合空泡截面独立扩张原理和空泡尾部闭合模型, 提出了两个无量纲数(


总的来说, Paryshev理论较好的建立了亚音速射流和空泡耦合作用模型, 但实际工程实践中, 喷流多为超音速工况, 需要考虑气体的可压缩性和总压损失. 除此之外, 射流和空泡相对位置关系的变化等都会影响到不同模式转化临界条件. Paryshev理论模型尚不足以解决上述问题, 且未能对射流作用下空泡形态进行理论描述. 本文利用VOF耦合水平集(level set)界面追踪方法, 考虑气体的可压缩性, 针对自由闭合流型的通气空泡, 改变射流强度和模型长度, 展开了一系列的空泡和超音速尾射流相互作用的数值模拟, 重点分析了通气空泡的稳定性和闭合位置.
1.
可压多相流数值方法
通气空泡和超音速尾喷流相互作用的过程中, 一方面要考虑射流作用下空泡界面的非定常演化特性, 另一方面要考虑气体可压缩性的影响. 空泡内气体可压缩性越明显, 通气空泡越不稳定[21-22]. 本文基于商业软件Fluent平台, 只考虑气相可压, 并通过CLSVOF方法来模拟空泡界面的演化过程.
1.1
控制方程
多相流中VOF模型的连续方程, 动量方程, 能量方程表达如下
$$ frac{{partial { ho _m}}}{{partial t}} + frac{partial }{{partial {x_i}}}left( {{ ho _m}{u_i}} ight) = 0 $$  | (1) |
$$ begin{split} &frac{partial }{{partial t}}left( {{ ho _m}{u_i}} ight) + frac{partial }{{partial {x_j}}}left( {{ ho _m}{u_i}{u_j}} ight) = &quad - frac{{partial p}}{{partial {x_i}}} + frac{partial }{{partial {x_j}}}left[ {{mu _m}left( {frac{{partial {u_i}}}{{partial {x_j}}} + frac{{partial {u_j}}}{{partial {x_i}}}} ight)} ight] + { ho _{ m{m}}}{g} + {F_{{ m{CSF}}}}end{split} $$  | (2) |
$$ begin{split} &frac{partial }{{partial t}}sumlimits_{k = w,g} {left( {{alpha _k}{ ho _k}{E_k}} ight)} + &quadfrac{partial }{{partial {x_j}}}{u_j}sumlimits_{k = w,g} {left[ {{alpha _k}left( {{ ho _k}{E_k} + p} ight)} ight]} = frac{partial }{{partial {x_j}}}left( {{k_{{ m{eff}}}}frac{{partial T}}{{partial {x_j}}}} ight)end{split} $$  | (3) |
式中



ho $



m{eff}}}} $

ho _{
m{m}}}{g} $

m{CSF}}}} $




$$ { ho _m} = { ho _w}(1 - {alpha _g}) + { ho _g}{alpha _g} $$  | (4) |
$$ {mu _m} = {mu _w}(1 - {alpha _g}) + {mu _g}{alpha _g} $$  | (5) |
混合相声速的计算公式如下
$$ ?c={left[ ho left(frac{{alpha }_{g}}{{ ho }_{g}{c}_{{}_{g}}^{2}}+frac{{alpha }_{w}}{{ ho }_{w}{c}_{w}^{2}} ight) ight]}^{-0.5} $$  | (6) |
1.2
VOF耦合level set 界面捕捉方法
在Bourlioux[23], Sussman和Puckett[24]提出的耦合VOF和level-set (CLSVOF)方法中, 通过耦合求解体积分数方程和level-set函数方程来捕获和跟踪界面. 主要思想为: 首先利用VOF方法求解单位网格内的相体积分数, 得到界面位置, 这样可以确保质量守恒. 再利用体积分数初始化level-set距离函数, 通过求解距离函数得到界面分布情况, 采用level-set方法可以得到准确的界面曲率和法向量. VOF方法中体积分数输运方程如下
$$ frac{partial }{{partial t}}({alpha _g}{ ho _g}) + nabla cdot ({alpha _g}{ ho _g}{boldsymbol{u}}) = 0 $$  | (7) |
level-set方法中符号距离函数

$$ varphi (x,t) = left{ begin{aligned} & + left| d ight|,;;;;x in {text{the}};{text{primary}};{text{phase}} hfill & 0,;;;;;;;;;x in varGamma hfill & - left| d ight|,;;;;x in {text{the}};{text{second}};{text{phase}} end{aligned} ight. $$  | (8) |
式中d代表距界面的距离. 对于给定的速度场

$$ frac{{partial varphi }}{{partial x}} + nabla cdot left( {{boldsymbol{u}}varphi } ight) = 0 $$  | (9) |
由于数值计算过程中格式误的差影响, 经式(9)求解得到的距离函数包含误差, 不是真实的界面位置. 因此, 通常需要对距离函数进行重新初始化, 方程如下
$$ left. begin{array}{l}{varphi _tau } =(1 - left| {nabla varphi } ight|) { m{sign}} {{varphi _0}} hfill varphi (x,0) = {varphi _0} end{array} ight} $$  | (10) |
其中, 角标

m{sign}} {{varphi _0}}$

$$ { m{sign}} {{varphi _0}} = 2left[ {Hleft( {{varphi _0}} ight) - {1 mathord{left/ {vphantom {1 2}} ight. } 2}} ight] $$  | (11) |
ight) $

$$ Hleft( varphi ight){text{ = }}left{ begin{aligned} &0, qquadqquadqquad {text{if }}varphi < - varepsilon & {left( {varphi {text{ + }}varepsilon } ight)}/left( {2varepsilon } ight)+ sin ({text{ π }} varphi/varepsilon)/left(2{text{ π }} ight) ,;;;; {text{if }}left| varphi ight| < varepsilon & 1, qquadqquadqquad {text{if }}varphi > varepsilon end{aligned} ight. $$  | (12) |
其中, 参数


Level-set模型中界面单位法向量、曲率计算公式如下
$$ left. begin{aligned}&{boldsymbol{n}} = {left. {frac{{nabla varphi }}{{left| {nabla varphi } ight|}}} ight|_{varphi = 0}}&kappa = nabla cdot {left. {frac{{nabla varphi }}{{left| {nabla varphi } ight|}}} ight|_{varphi = 0}} end{aligned} ight}$$  | (13) |
计算过程中, 每个迭代时间步都需要重新初始化

1.3
湍流模型
k-ω SST湍流模型由k-ε模型和k-ω模型加权平均得到[25], 兼顾两者的优势, 在边界层分离流动和空化流动中具有广泛的应用. 其湍动能k和湍流比耗散率ω的输运方程可以表达如下
$$ begin{split} &frac{{partial left( {{ ho _m}k} ight)}}{{partial t}} + nabla cdot left( {{ ho _m}k{{boldsymbol{u}}}} ight) = nabla cdot left[ {left( {mu + {sigma _{k1}}{mu _t}} ight)nabla k} ight] +&qquad {tilde P_k} - {beta ^{text{*}}}{ ho _m}omega k end{split}$$  | (14) |
$$ begin{split} &frac{{partial left( {{ ho _m}omega } ight)}}{{partial t}} + nabla cdot left( {{ ho _m}omega {boldsymbol{u}}} ight) = nabla cdot left[ {left( {mu + {sigma _{omega 1}}{mu _t}} ight)nabla omega } ight] +&qquad gamma { ho _m}{S^2} - {beta _2}{ ho _m}{omega ^2} + left( {1 - {F_1}} ight)C{D_{komega }}end{split} $$  | (15) |
式中,






$$ left. begin{array}{l} {{{tilde P}_k} = min left( {{p_k},10{beta ^*}{ ho _m}omega k} ight)} {{P_k} = {u_t}{S^2}} end{array} ight} $$  | (16) |
湍流黏度

$$ {mu _t} = frac{{{ ho _m}{a_1}k}}{{max left( {{a_1}omega ,S{F_2}} ight)}} $$  | (17) |
式中, S为应变率,



$$ {F_1} = tanh ({arg}_1^4), ; {F_2} = tanh ({arg}_2^2) $$  | (18) |
$$ {ar}{{g}_1}{text{ = }}{ m{min}}left[ {{ m{max}}left( {frac{{sqrt k }}{{{beta ^ * }omega d}},frac{{500v}}{{{d^2}omega }}} ight),frac{{4{ ho _m}{sigma _{omega 2}}k}}{{{C}{{D}_{komega }}{d^2}}}} ight] $$  | (19) |
$$ C{D_{komega }} = max left( {2{ ho _m}frac{1}{{{sigma _{omega 2}}omega }}nabla knabla omega ,1.0 times {{10}^{ - 10}}} ight) $$  | (20) |
$$ {arg _2}{text{ = }}{ m{max}}left( {2frac{{sqrt k }}{{{beta ^*}omega d}},frac{{500v}}{{{d^2}omega }}} ight) $$  | (21) |
各模型参数取值如表1所示.
表
1
k-ω SST湍流模型参数
Table
1.
Model parameters
table_type1 ">
| $ {sigma _{k1}} $ | $ {sigma _{omega 1}} $ | $ {beta _1} $ | $ {sigma _{k2}} $ | $ {sigma _{omega 2}} $ | $ {beta _2} $ | $ {beta ^*} $ | $ {a_1} $ | $ gamma $ |
| 0.5 | 0.5 | 0.075 | 1 | 0.856 | 0.0828 | 0.09 | 0.55 | 0.44 |
下载: 导出CSV
|显示表格
1.4
几何模型、网格划分及边界条件
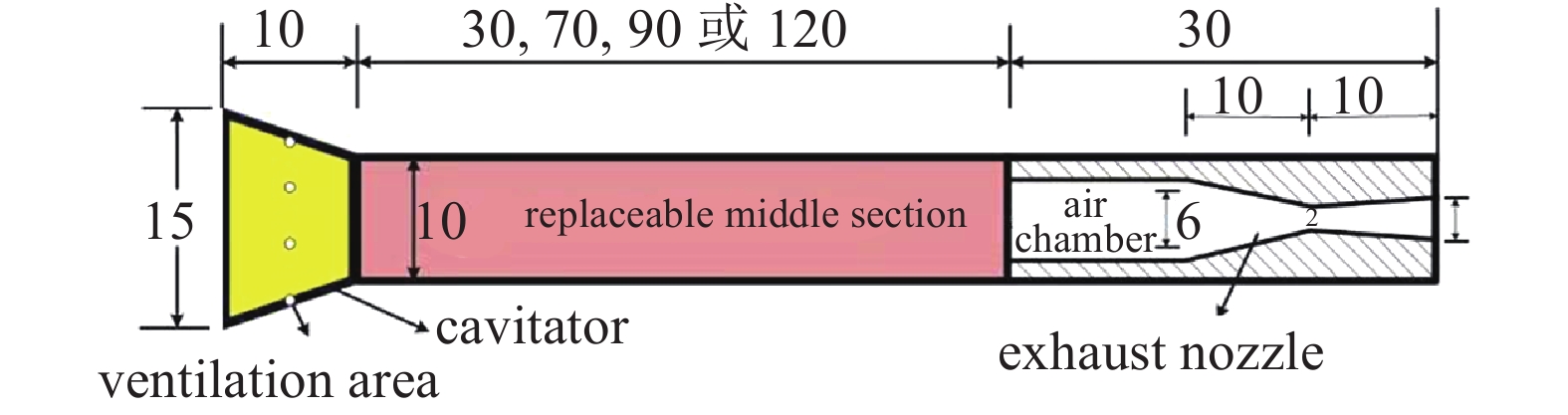
实验模型采用回转体结构, 主要由头部空化器、中间段(共4个长度)和尾喷管构成, 其外形示意图及尺寸如图3所示. 尾喷管结构设计为喉部和出口的扩张比为2.25, 出口设计马赫数

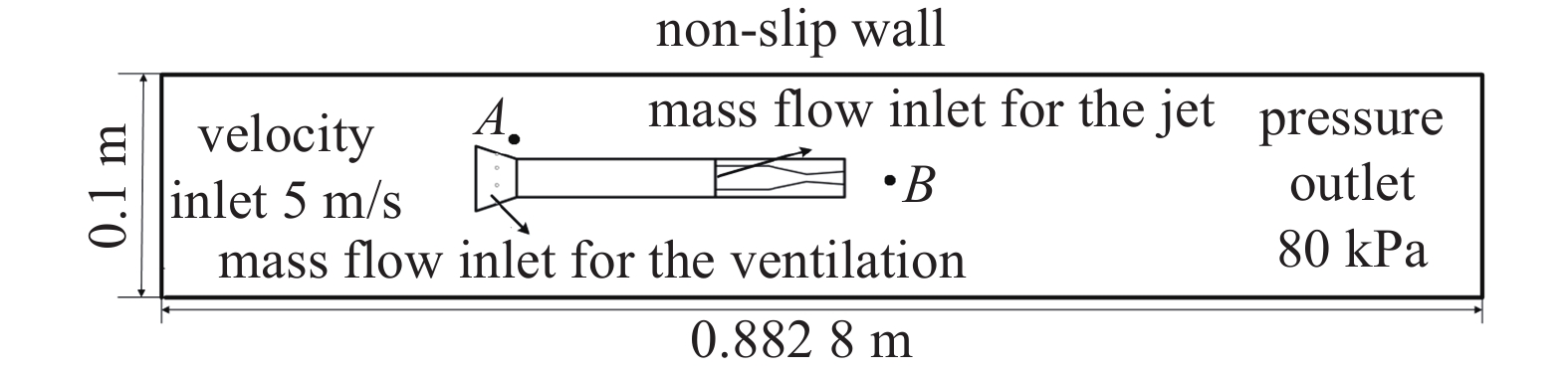
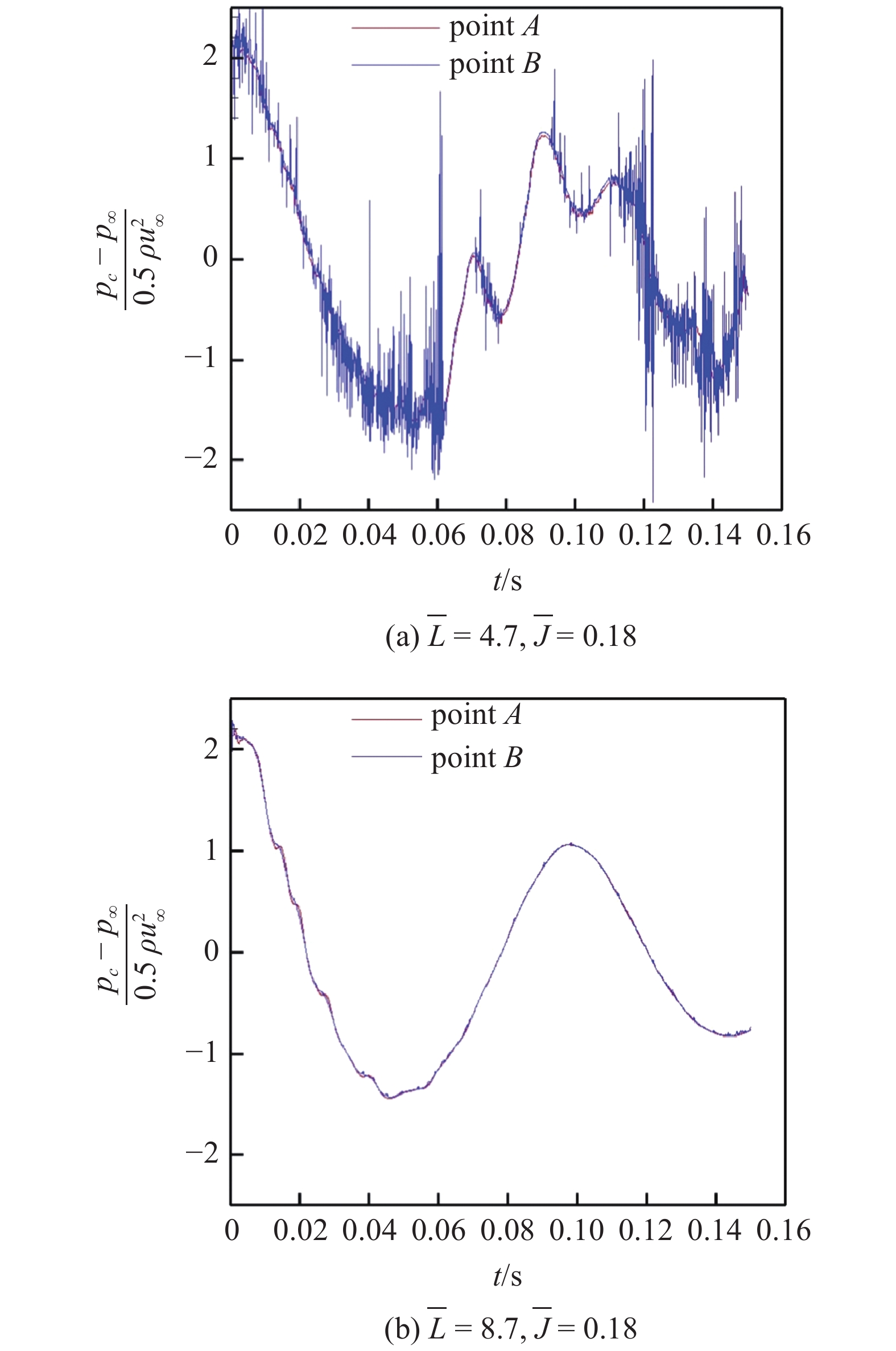
计算域和边界条件设置, 以及喷管出口附近网格如图4和图5所示. 入口速度5 m/s, 出口压力80 kPa, 远场为无滑移壁面边界条件. 通气和射流入口采用质量流量边界条件, 通气质量流量为0.000 1 kg/s. 并在空化器附近和喷管出口附近设置压力监测点A和B. 网格采用结构网格, 网格量为180万, 在空泡界面处和喷管出口处做了网格加密处理.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
几何模型(单位: mm)
Figure
3.
The geometric model (unit: mm)
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
计算域和边界条件
Figure
4.
Computation domain and boundary condition
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
模型附近结构网格
Figure
5.
Employed structured mesh near the model
下载: 全尺寸图片
幻灯片
2.
数值仿真结果
2.1
不同射流强度计算结果分析
2.1.1
喷管出口激波结构
仿真计算过程中对比了4个入口质量流量. 图6展示了t=5 ms时, 不同入口质量流量条件下喷管出口速度云图及激波结构, 其中


m{kg}}/ {
m{s}}} $

m{kg}}/ {
m{s}}} $

m{kg}}/ {
m{s}}} $

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-6-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-6-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure6-1" />
6
不同入口质量流量条件下喷管出口速度云图及激波结构
6.
Velocity cloud plot and shock wave structure at the nozzle exit as the inlet mass flow varies
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
不同入口质量流量条件下喷管出口速度云图及激波结构(续)
Figure
6.
Velocity cloud plot and shock wave structure at the nozzle exit as the inlet mass flow varies (continued)
下载: 全尺寸图片
幻灯片
2.1.2
射流作用下空泡界面的演化过程
超音速尾流作用下, 射流卷吸周围空泡内气体, 导致空泡内部出现质量流动的不平衡, 空泡界面会经历一个复杂演化过程, 来达到新的平衡状态. 图7展示了空泡界面的非定场演化过程. 射流开启后, 首先大量的气体使得空泡发生膨胀, 膨胀部分向后运动, 接着空泡由于形态拉长而出现中间部分颈缩, 进一步出现断裂, 空泡整体回缩, 长度变短. 之后, 空泡开始进入周期性震荡泄气阶段. 射流强度越强, 空泡出现颈缩断裂的时间越早, 更快的进入到震荡泄气阶段. 当射流的强度超过一定临界值以后, 在空泡尾部会出现液体射流冲击空泡界面的情况, 从而进一步导致空泡失稳.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-7.jpg'" class="figure_img
figure_type2 ccc " id="Figure7" />
图
7
空泡界面演化过程
Figure
7.
Cavity inteface evolution process
下载: 全尺寸图片
幻灯片
2.1.3
液体回射流的形成机制及空泡失稳过程
通气空泡尾部一般存在回射流泄气和双涡管泄气两种典型模式[26]. 其中, 双涡管模式时空泡尾部形成稳定反向螺旋的双涡管流动. 而回射流泄气以空泡尾部非稳定回注射流的出现和螺旋式涡团的脱落为特征, 值得注意的是, 液体回射流只出现在空泡的下表面. 2012年Savchenko和Savchenko[27]指出Rayleigh-Taylor (RT)不稳定性机制是导致界面不稳定的主要原因. 气体填充界面凹陷过程中导致液流飞溅, 从而出现回射现象. 2019年Wu等[28]利用流动可视化技术做了更多详细的解释, 由于浮力的影响空泡尾部会上飘形成一定的角度


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
通气空泡内液体回射流形成机制
Figure
8.
Formation mechanism of liquid back-jet flow in the ventilated cavity
下载: 全尺寸图片
幻灯片
对于尾喷流作用下的通气空泡在夹断过程会出现两种情况, 如图9所示, 第一种射流的强度较弱, 空泡夹断以后空泡尾部为尖尾型, 与图7中


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
尾喷流作用下液体回射流形成机制
Figure
9.
Formation mechanism of liquid back-jet flow under the action of a tail jet
下载: 全尺寸图片
幻灯片
空泡稳定性受到很多流动参数的影响, 为了确定哪些流动参数才是关键所在, 因而对空泡的破坏过程展开了详细研究. 图10展示了液体回射流作用下通气空泡的失稳过程, 液体回射形成之后, 沿着空泡内气体回流的方向向前运动, 直至接触空化器附近的界面, 并与迎面的来流发生碰撞, 对空泡产生巨大破坏, 空泡界面已经严重扭曲变形, 接着空泡界面的振荡会向下游传播, 最终导致整个空泡失稳. 图11为实验中通过高速摄影拍摄到的空泡内部液体回射流和空泡界面发生接触, 从而导致空泡失稳的过程, 实验条件对应仿真工况为


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
液体回射流作用下空泡失稳过程
Figure
10.
Cavity instablity process under the liquid back-jet flow
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
实验中拍摄液体回射流诱导空泡失稳过程
Figure
11.
Cavity instablity process under the liquid back-jet flow in the experiment
下载: 全尺寸图片
幻灯片
2.1.4
射流强度对空泡稳定性的影响
分析在空泡失稳的过程中, 剪切和重力作用是主要因素, 强剪切力使得空泡形态拉长夹断. 而空泡夹断过程中往往伴随着气流的回击现象, 使得泡内压力的突增和突降. 图12展示了随着射流强度的增加, 通气空泡形态的变化. 当




 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
随着射流强度增加, 通气空泡体积分数云图
Figure
12.
Volume fraction cloud plot for the caity as the jet intensity increases
下载: 全尺寸图片
幻灯片
总的来说, 射流强度越强, 气液两侧的剪切作用越强, 产生的液体回射流的强度越大, 界面越容易破坏, 最终造成液体冲击界面进入空泡内, 形成液体回射流, 进一步空泡界面会破碎, 变成水气掺混的状态.
图13对比了射流强度为


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-13-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-13-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure13-1" />
13
对比不同射流强度条件下空泡内压力随时间的变化
13.
The change of pressure inside the caivty with time is compared under different jet intensity conditions
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-14.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-14.jpg'" class="figure_img
figure_type1 bbb " id="Figure14" />
图
14
随着模型长度增加, 通气空泡体积分数云图
Figure
14.
Volume fraction cloud plot for the caity as the model length increases
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
对比不同射流强度条件下空泡内压力随时间的变化(续)
Figure
13.
The change of pressure inside the caivty with time is compared under different jet intensity conditions (continued)
下载: 全尺寸图片
幻灯片
2.2
不同模型长度计算结果分析
2.2.1
相对位置对空泡稳定性的影响
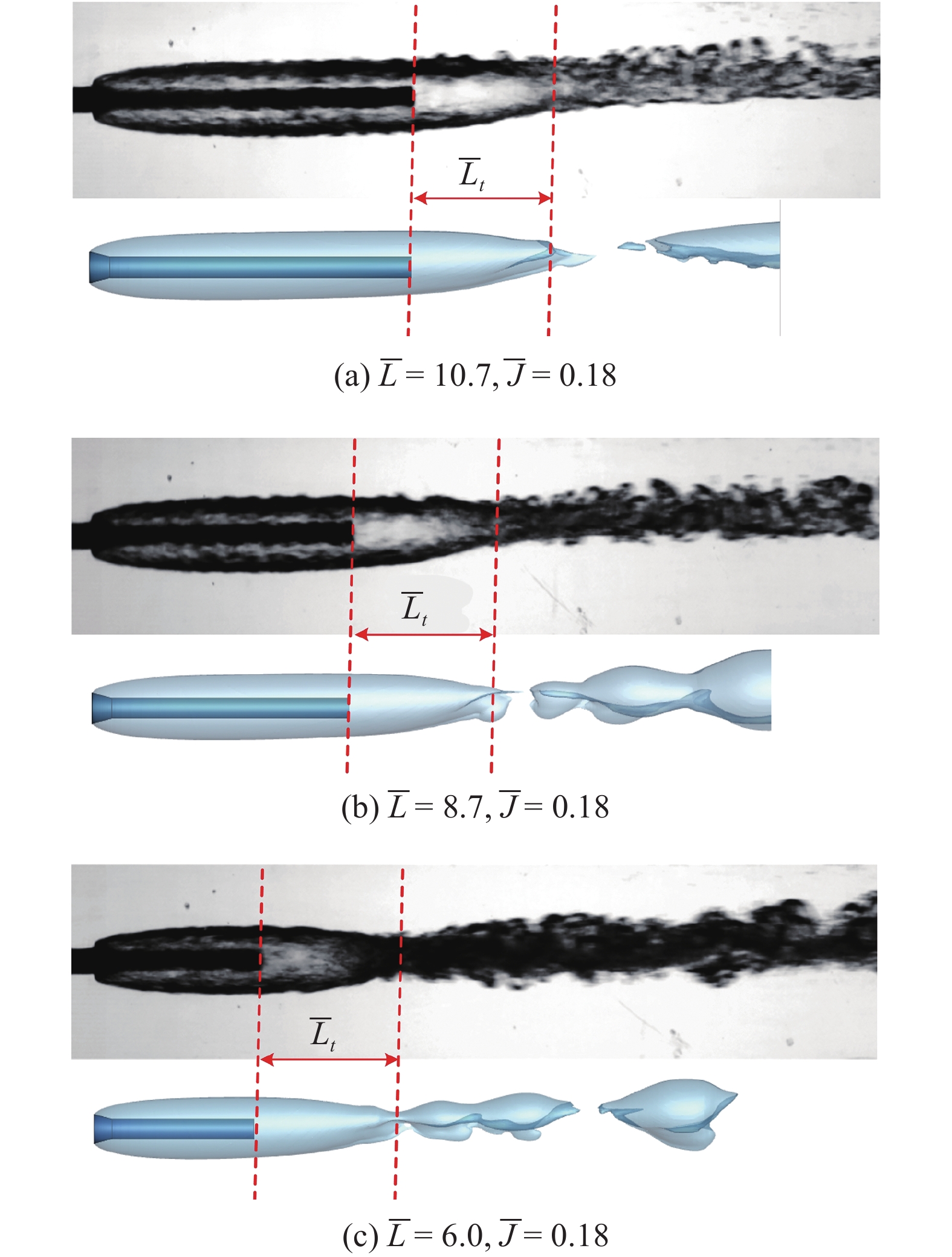
仿真计算过程中同时也对比了4个不同的模型长度条件下空泡射流相互作用的结果. 图14展示了随着模型长度的增加, 通气空泡形态的变化. 除了第一个工况

图15对比了射流强度为


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-15.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-15.jpg'" class="figure_img
figure_type1 bbb " id="Figure15" />
图
15
对比不同模型长度条件下空泡内压力随时间的变化
Figure
15.
The change of pressure inside the caivty with time is compared under different model length conditions
下载: 全尺寸图片
幻灯片
特别注意的是当射流强度一定时, 随着模型长度的增加, 液体回射流并没有产生. 分析原因为, 模型长度越长, 在空泡夹断后空泡尾部越容易保持尖尾型. 假定尾喷流作用下空泡横截面仍然保持椭圆曲线, 长半轴为






 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-16.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-16.jpg'" class="figure_img
figure_type1 bbb " id="Figure16" />
图
16
尾喷流作用下空泡尺寸示意图
Figure
16.
Sketch map of cavity size under the action of a tail jet
下载: 全尺寸图片
幻灯片
总的来说, 模型长度越小, 喷管出口离空化器越近, 空泡内尾流扰动越容易传播至空化器, 界面的初始扰动也越大, 界面越容易破坏.
2.2.2
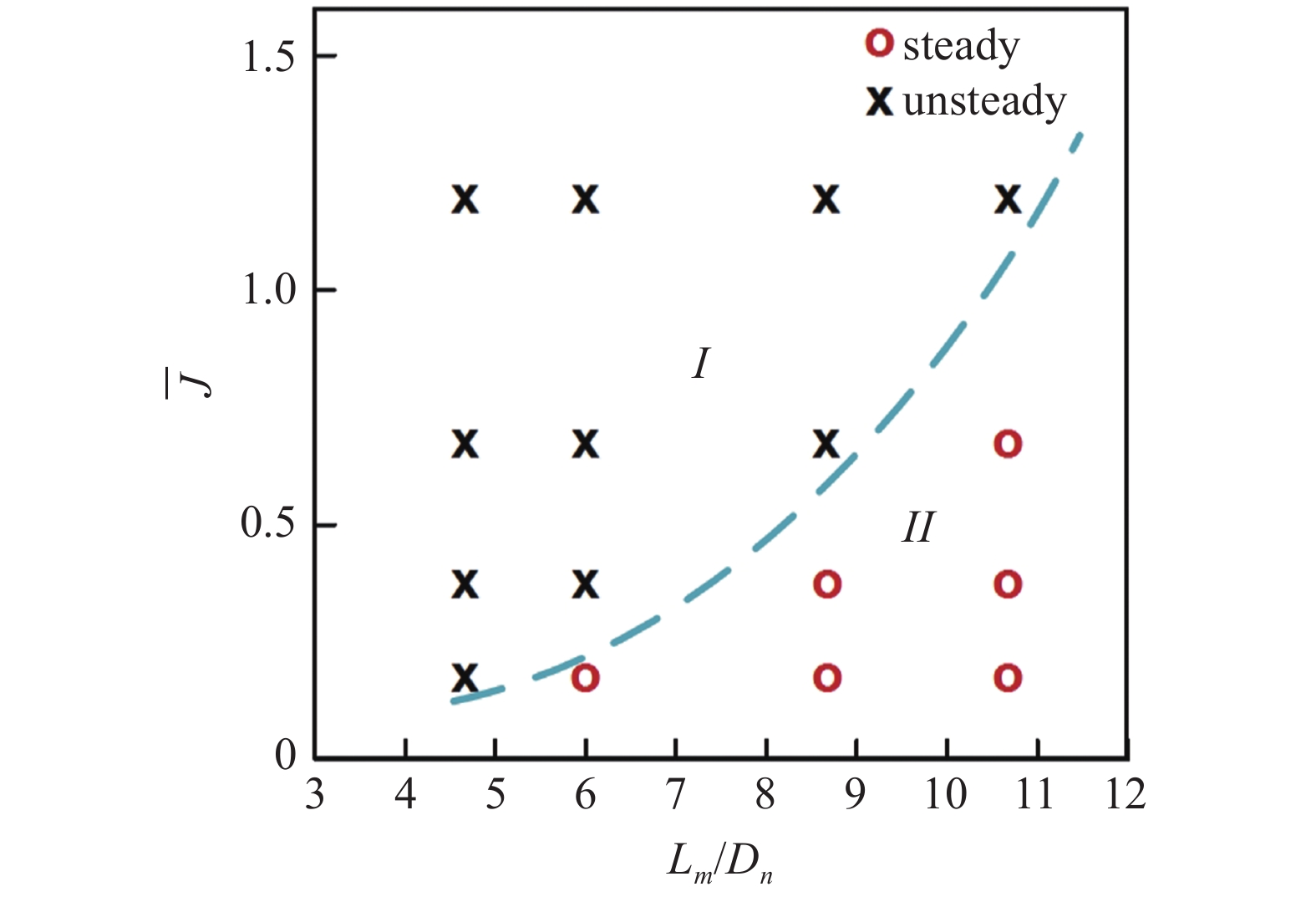
射流作用下空泡稳定和失稳的临界条件
通过上述分析可以得到空泡失稳机制主要取决于两个无量纲参数






 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-17.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-17.jpg'" class="figure_img
figure_type1 bbb " id="Figure17" />
图
17
射流作用下空泡稳定和失稳的临界条件
Figure
17.
Critical conditions for the stable and unstable cavity under tail jet action
下载: 全尺寸图片
幻灯片
3.
尾喷流作用下稳定空泡的闭合位置理论分析
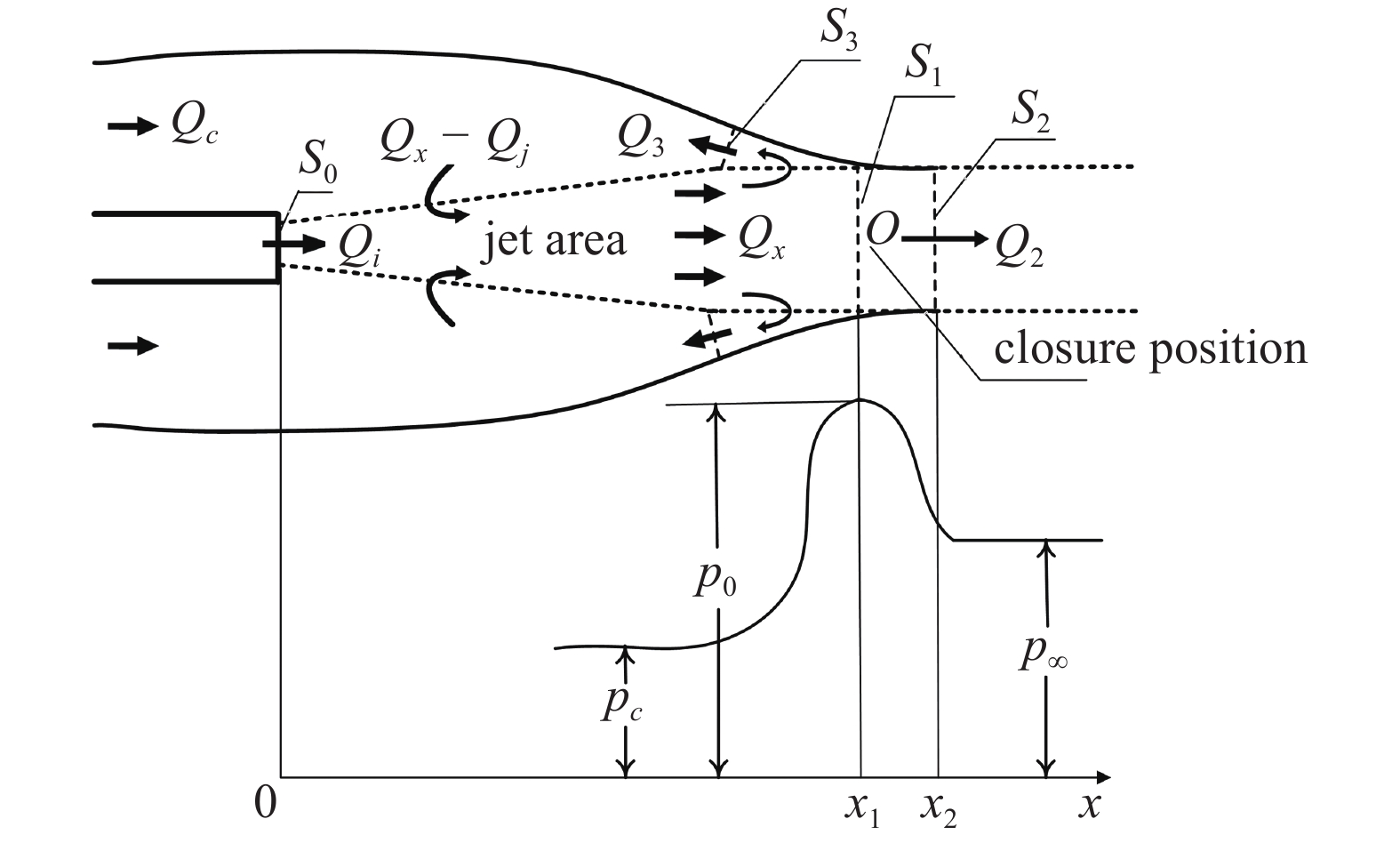
射流在空泡内表现为受限射流, 其卷吸效应的强度一定程度上受到空泡形态变化的影响. 结合经典的射流动力学理论, 对Paryshev理论[14]推导过程中的连续方程加以合理修正, 并考虑空泡内气体和射流气体之间的湍流扩散和卷吸效应带来的射流速度衰减, 构建空泡射流结构判别模型. 射流作用下空泡内部质量流动和压力分布如图18所示.




$$ {S_1} - {S_2} = frac{{{W_c}}}{{{p_0} - {p_infty }}} $$  | (22) |
其中,







$$ { ho _{{ m{jet}}}}({S_2}U_{_2}^2 - {S_3}U_3^2 - {S_0}U_0^2) = {p_c}{S_1} - {p_0}({S_1} - {S_2}) - {p_infty }{S_2} $$  | (23) |
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-18.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-18.jpg'" class="figure_img
figure_type1 bbb " id="Figure18" />
图
18
射流作用下空泡内部质量流动和压力分布示意图
Figure
18.
Schematic of the cavity internal mass flow and pressure distribution with a gasous jet
下载: 全尺寸图片
幻灯片
空泡稳定闭合以后, 空泡流入和流出的气体质量应该守恒(前提是射流作用下空泡为稳定状态, 因为一旦失稳, 破碎界面带来气体损失不可忽视), 而通气的流量远远小于射流流量, 可以忽略, 得到连续方程,

$$ {S_0}{U_0} = {S_2}{U_2} $$  | (24) |
假定射流中心轴线速度衰减和射流卷吸周围气体流量都呈线性关系[30]
$$ {U_2} = frac{{{k_1}{U_0}}}{{overline x }} $$  | (25) |
$$ frac{{{Q_x} - {Q_j}}}{{{Q_j}}} = {k_2}overline x + {k_3} $$  | (26) |
通过上面4个方程式(22) ~ 式(25), 假设射流回流的速度大小近似等于射流在闭合点下游的速度,

$$ begin{aligned} & sigma = dfrac{{2left( {{p_infty } - {p_c}} ight)}}{{{ ho _infty }U_infty ^2}} < < 1 & overline J = dfrac{{{ ho _0}U_0^2{S_0}}}{{{W_C}}} end{aligned}$$  |
由此可以得到无量纲的回流流量为
$$ overline {{Q_3}} = frac{{{Q_3}}}{{{Q_j}}} = left( {frac{1}{{overline J {k_1}}} - frac{1}{{{k_1}}}} ight)overline x + 1 $$  | (27) |
根据空泡内部质量流量平衡, 在空泡闭合处射流卷吸空泡内气体流量应该等于射流的回流流量, 即可得到尾喷射流作用下, 空泡的理论闭合位置离喷管出口距离

$$ qquadoverline {{Q_3}} = frac{{{Q_x} - {Q_j}}}{{{Q_j}}} $$  | (28) |
$$ qquadleft( {frac{1}{{overline J {k_1}}} - frac{1}{{{k_1}}}} ight)overline {{L_t}} + 1 = {k_2}overline {{L_t}} + {k_3} $$  | (29) |
$$qquad overline {{L_t}} {text{ = }}fleft( {bar J} ight) $$  | (30) |
对于射流作用下空泡稳定的工况, 空泡尾部闭合位置到喷管出口的无量纲长度


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-19.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/12//lxxb2021-346-19.jpg'" class="figure_img
figure_type1 bbb " id="Figure19" />
图
19
不同模型长度条件下空泡尾部闭合位置到喷管出口长度的实验结果
Figure
19.
Experimental and numerical results on the length from the nozzle outlet to the closed position under differert model length
下载: 全尺寸图片
幻灯片
4.
结论
本文利用VOF耦合level set界面追踪方法, 考虑气体的可压缩性, 展开了一系列改变射流强度和模型长度的通气空泡和超音速尾射流相互作用的数值仿真, 重点分析了通气空泡的稳定性和闭合位置. 数值结果表明:
(1)在超音速尾射流作用下, 通气空泡的界面会经历膨胀、颈缩、断裂回缩过程, 然后开始周期性震荡泄气. 通气空泡的形态长度相较于无射流条件下大大减小.
(2)空泡失稳过程中, 空泡尾部产生液体回射流会顺着气体回流路径向前冲击空化器附近界面. 其产生过程与空泡断裂时尾部形态紧密联系, 并表现出上下不对称的特点, 更易形成于空泡尾部上表面.
(3)气液界面两侧强剪切和重力作用诱导了液体射流的形成, 而这种空泡失稳机制主要取决于两个无量纲参数




(4)空泡越稳定, 喷管出口的压力波动的幅度和频率就越低, 通气空泡能为火箭发动机提供稳定的工作环境.
(5)对于空泡失稳的工况, 空泡闭合在喷管出口; 而空泡稳定的工况, 喷管出口到闭合位置的长度只与

