引 言
近年来, 压电材料因其具有能实现电能和机械能互相转换的特性, 在工程结构中日益受到重视[1-2], 被广泛应用于结构的形状控制、振动和噪声控制、损伤检测等领域[3-4]. 从机械振动中提取能量的特性极大满足了传感器自给供电的经济需求与生态需求, 因此压电材料广泛应用于俘能器中[5-6]. 到目前为止, 最常用的压电俘能器采用悬臂梁式, 通常是由一个结构层和压电材料(如压电陶瓷PZT、压电复合材料PVDF)层组成[7]. ****们对直梁压电振动能量俘获系统进行了大量且详细的研究. Erturk和Inman[8-9]在Euler-Bernoulli梁假设下, 研究了在基座横向运动时悬臂式压电俘能器横向振动的精确解析解. 另外考虑到常用的单自由度谐波激励对预测悬臂梁的运动可能会产生不准确的结果, 推导了修正因子以改进单自由度横向和纵向振动激励模型. Zhao等[10]应用格林函数法对悬臂式Timoshenko直梁压电俘能器进行了动力学分析, 得到了强迫振动的解析解, 探究了各类因素对电压响应的影响. Zhou和Lei[11]研究了非对称三稳态压电俘能器的非线性动力学特性, 以提高不同激励下的能量收集性能. Huang等[12] 对电阻?电感谐振电路非线性能量采集器的稳态响应机制进行了理论研究. Fang等[13]根据哈密顿原理提出了利用离心软化效果分析旋转冲击能量俘获的理论模型.
而曲梁形式的压电俘能器的优点在于可用于多方向振动能量收集[14], 在微型电子系统以及复杂边界的工程结构中应用广泛[15]. 王剑等[16]构建了空间压电曲梁单元形状控制模型并得到了结构的最优形状控制电压. 周勇等[17]提出了一种基于面内驱动的层合压电悬臂曲梁形式微位移驱动结构, 忽略方程中曲率半径的影响获得了该曲梁在外荷载作用下控制方程的解析解. 丁维高和谢进[18]利用哈密顿原理, 研究了在水平与数值方向简谐振动激励的作用下压电曲梁俘能器的机电耦合的解析解. Kathpalia等[19] 建立了采用智能陶瓷压电材料的弯曲式压电传感器的分析模型, 并获得了封闭式机电频率响应方程. Chen等[20]采用数值方法分析了具有弹性约束的功能梯度压电曲梁的自由振动特性和瞬时响应. Tabatabaei-Nejhad等[21]研究了嵌入压电层的层压曲梁的平面外振动特性, 考虑了扭转和弯曲变形造成的剪切变形和旋转惯性效应. 何燕丽和赵翔[22]利用格林函数法求解Prescott型曲梁俘能器强迫振动的响应.
曲梁结构如今广泛地应用于各种领域的工程结构中, 在外荷载激励下难免造成损伤产生裂纹, 从而严重影响材料结构的整体性能和使用寿命[23-24]. 对损伤曲梁的振动特性研究也一直是国内外研究的热点[24-27]. 为识别结构中的损伤发展了许多检测方法, 分别有超声波法、电涡流法、磁粉法和红外识别法[28], 以及基于结构振动特性的损伤识别法, 后者具有明显的非破坏性, 方便、快速、便宜的优点被广泛采用[28]. 另外, 还有基于压电效应的主动感应法对结构的健康监测和损伤检测方法. 孙威等[29]利用智能压电传感器对混凝土构件的裂缝损伤发展状况进行监测, 探索一种基于压电波动法的裂缝损伤监测方法. Hou等[30]将压电智能材料和压电陶瓷材料应用于传感器, 对地震力作用下的混凝土结构整体剪切应力进行监测研究. Markovic等[31]建立了使用压电智能传感器的主动监测系统和损坏检测的有效有限元模型, 对基于压电波动法的埋入式压电陶瓷混凝土梁损伤识别系统进行模拟分析. 由此, 本文提出可以采用逆方法, 即通过振动引起的压电俘能器的信号响应变化分析曲梁的振动问题, 从而对结构进行损伤监测.
目前已经有不少****对裂纹曲梁的振动问题和曲梁式压电俘能器进行了研究, 但是有关损伤曲梁式压电俘能器强迫振动问题的研究较少. 在上文已经阐述了裂纹存在给结构带来的负面影响, 因此对含裂纹损伤的曲梁压电俘能器的研究是有实际意义的. 本文不仅研究其强迫振动问题, 还采用逆方法, 即利用损伤曲梁振动时的俘能器电压响应变化, 提出了一种监测结构损伤的方法.
本文建立了含裂纹损伤的曲梁压电俘能器的力电耦合模型, 得到其强迫振动的解析解并基于压电俘能器的响应监测曲梁结构的损伤情况. 基于文献[22]中Prescott型曲梁压电俘能器的解析解, 引入局部刚度模型描述裂纹损伤截面的力学特性, 应用格林数法和传递矩阵法推导含多裂纹曲梁压电俘能器强迫振动下的解析解. 根据线性系统叠加原理, 对力电耦合系统解耦, 推导了该裂纹损伤模型的输出电压的解析式. 数值模拟了压电俘能器在曲梁结构处于振动状态下的响应信号, 提出了对结构进行损伤监测的方法, 以期为曲梁式压电俘能器的振动研究以及损伤结构的监测和优化设计提供理论参考.
1.
损伤曲梁压电俘能器的力电耦合模型
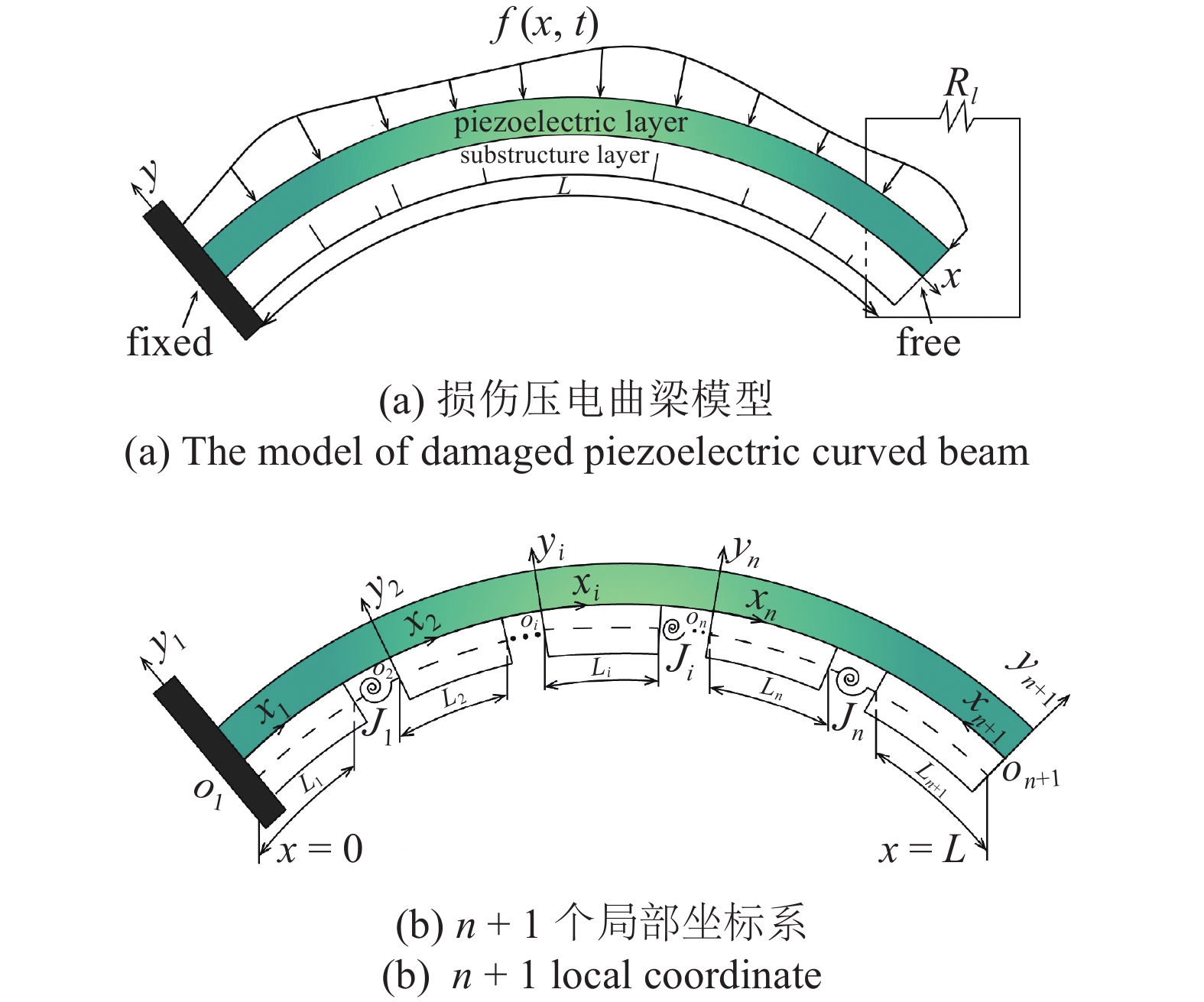
建立如图1所示的含裂纹损伤的悬臂式曲梁压电俘能器模型. 俘能器中的压电层材料比结构层材料的柔性好, 因此结构层上更容易产生裂纹. 如图1(a)所示, 该模型结构层上存在n个开口裂纹, 假设受到外力作用时, 裂纹截面处的局部刚度发生变化, 曲梁的挠度出现不连续性, 曲梁的未损伤部分没有受到影响[32]. 因此, 在裂纹损伤截面处建立局部柔度模型用来描述截面的力学特性, 将裂纹处视为一个刚度为

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
损伤曲梁压电俘能器模型
Figure
1.
The model of curved piezoelectric energy harvester with n cracks
 下载:
下载: 全尺寸图片
幻灯片
$$ {K_{eq}} = frac{{EI}}{{{h_s}}}frac{1}{{{{overline C}_W}}} $$  | (1) |
式中



$$ begin{split}& {overline C _W} = 5.346{{h'}^2}left( {1.86 - 3.95h' + 16.375{{h'}^2} - 37.226{{h'}^3} + } ight. &quad 76.81{{h'}^4} - 126.9{{h'}^5}left. { + 172{{h'}^6} - 143.97{{h'}^7} + 66.56{{h'}^8}} ight) end{split} $$  | (2) |
式中

如图1(b)所示, 压电曲梁被n个裂纹分成n + 1段完整部分, 每段长度为
ight)$


ight)$


ight)$


已知文献[22]中建立的Prescott曲梁模型, 没有考虑曲梁轴向力以及轴向惯性项, 仅考虑了曲梁的径向位移. 因此曲梁压电俘能器的振动控制方程是一个四阶偏微分方程, 引用文献[22]中的格林函数, 该格林函数是强迫振动下的压电曲梁径向位移
ight) $

$$left. begin{aligned}&{G_1}left( {x;{x_0}} ight) = Hleft( {x - {x_0}} ight){phi _{11}}left( {x - {x_0}} ight) + {phi _2}left( x ight){W_1}left( x ight)+&qquadquad {phi _3}left( x ight){W_{ m{1}}}^prime left( x ight) + {phi _4}left( x ight)W_1^{''}left( x ight) + {phi _5}left( x ight){W_1}^{prime prime prime }left( x ight)&{G_2}left( {x;{x_0}} ight) = bar VHleft( {x - {x_0}} ight){phi _{12}}left( {x - {x_0}} ight) + {phi _2}left( x ight){W_2}left( x ight)+&qquadquad {phi _3}left( x ight){W_2}^prime left( x ight) + {phi _4}left( x ight)W_2^{''}left( 0 ight) + {phi _5}left( x ight)W_2^{'''}left( 0 ight)&{G_3}left( {x;{x_0}} ight) = bar VHleft( {x - {x_0}} ight){phi _{13}}left( {x - {x_0}} ight) + {phi _2}left( x ight){W_3}left( x ight)+&qquadquad {phi _3}left( x ight){W_3}^prime left( x ight) + {phi _4}left( x ight)W_3^{''}left( 0 ight) + {phi _5}left( x ight)W_3^{'''}left( 0 ight)n[-10pt]end{aligned} ight}$$  | (3) |
式中




ight)$


ight)$

ight), $

ight)$

$$ left. begin{aligned} & {phi _{11}}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)left( {{b_1}s_i^2 - {b_2}} ight)} & {phi _{12}}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)left( { - {b_3}{s_i}} ight)} & {phi _{13}}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)left( {cs_i^{ - 1}} ight)} & {phi _2}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)left( {s_i^3 + {a_1}{s_i}} ight)} & {phi _3}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)left( {s_i^2 + {a_1}} ight)} & {phi _4}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight){s_i}} & {phi _5}left( x ight) = sumlimits_{i = 1}^4 {{A_i}left( x ight)} end{aligned} ight}$$  | (4) |
$$ left. begin{aligned} & {A_1}left( x ight) = frac{{{{ m{e}}^{{s_1}x}}}}{{left( {{s_1} - {s_2}} ight)left( {{s_1} - {s_3}} ight)left( {{s_1} - {s_4}} ight)}} & {A_2}left( x ight) = frac{{{{ m{e}}^{{s_2}x}}}}{{left( {{s_2} - {s_1}} ight)left( {{s_2} - {s_3}} ight)left( {{s_2} - {s_4}} ight)}} & {A_3}left( x ight) = frac{{{{ m{e}}^{{s_3}x}}}}{{left( {{s_3} - {s_1}} ight)left( {{s_3} - {s_2}} ight)left( {{s_3} - {s_4}} ight)}} & {A_4}left( x ight) = frac{{{{ m{e}}^{{s_4}x}}}}{{left( {{s_4} - {s_1}} ight)left( {{s_4} - {s_2}} ight)left( {{s_4} - {s_3}} ight)}} end{aligned} ight} $$  | (5) |
式(4)和式(5)中
$$ left. begin{aligned} & {a}_{1}=frac{1}{{R}^{2}} + frac{gamma {varOmega }^{2}}{EI} + frac{text{i}varOmega {c}_{1}-mu {varOmega }^{2}}{EA} & {a}_{2}=text{}frac{left(text{i}varOmega {c}_{1}-mu {varOmega }^{2} ight)gamma {varOmega }^{2}}{EIEA} + frac{gamma {varOmega }^{2}}{EI{R}^{2}} & {b}_{1}=frac{1}{EA} & {b}_{2}=text{}frac{gamma {varOmega }^{2}}{EIEA} & {b}_{3}=text{}frac{{vartheta }_{2}}{EAR} + frac{{vartheta }_{1}}{EI} & c=text{}-frac{gamma {varOmega }^{2}{vartheta }_{2}}{EIEAR}end{aligned} ight}$$  | (6) |
且
ight)$

$$ {s^4} + {a_1}{s^2} + {a_2} = left( {{s_1} - {s_1}} ight)left( {{s_1} - {s_2}} ight)left( {{s_1} - {s_3}} ight)left( {{s_1} - {s_4}} ight) $$  | (7) |
式(6)中,







在本文的后续推导中需要用到轴向位移, 根据曲梁控制方程[22]可推出轴向位移
ight)$

$$ begin{split}& Vleft( x ight) = {d_1}W'''left( x ight) + {d_2}W'left( x ight) + {d_1}Fleft( x ight) + & quad {d_3}bar Vleft[ {delta left( {x - {x_1}} ight) - left( {x - {x_2}} ight)} ight] + {d_{text{4}}}bar Vleft[ {delta left( {x - {x_1}} ight) - left( {x - {x_2}} ight)} ight] end{split} $$  | (8) |
式中
$$ left. begin{aligned}&{d}_{1}=frac{EIR}{gamma {varOmega }^{2}}&{d}_{2}=frac{text{i}{c}_{1}EIR}{gamma varOmega EA}-frac{mu EIR}{gamma EA}-frac{EI}{gamma {varOmega }^{2}R} + R&{d}_{3}={vartheta }_{1}&{d}_{4}=frac{{vartheta }_{2}EI}{EAR}end{aligned} ight}$$  | (9) |
根据式(3) ~ 式(9)得到由外荷载引起的轴向位移的格林函数
$$ begin{split}& {V_1}left( {x;{x_0}} ight) = Hleft( {x - {x_0}} ight){{bar phi }_{11}}left( {x - {x_0}} ight) + {{bar phi }_2}left( x ight){W_1}left( x ight) +&quad {{bar phi }_3}left( x ight){W_{text{1}}}^prime left( x ight) + {{bar phi }_4}left( x ight){W_{text{1}}}^{prime prime }left( x ight) + {{bar phi }_5}left( x ight){W_1}^{prime prime prime }left( x ight) end{split} $$  | (10) |
式中,
ight){phi _m};left( {m = 2,3,4,5,11}
ight)$

$$ left. begin{aligned}& {W_{1i}}left( {{x_i};{x_{i0}}} ight) = {{bar G}_{1i}}left( {{x_i};{x_{i0}}} ight) =& qquadquad Hleft( {{x_i} - {x_{i0}}} ight){phi _{11}}left( {{x_i} - {x_{i0}}} ight) + {phi _2}left( {{x_i}} ight){W_{1i}}left( x ight) +& qquadquad {phi _3}left( {{x_i}} ight){W_{{text{1i}}}}^prime left( x ight) + {phi _4}left( {{x_i}} ight){W_{{text{1i}}}}^{prime prime }left( x ight) + {phi _5}left( {{x_i}} ight){W_{1i}}^{prime prime prime }left( x ight) & {V_{1i}}left( {{x_i};{x_{i0}}} ight) = Hleft( {{x_i} - {x_{i0}}} ight){{bar phi }_{11}}left( {{x_i} - {x_{i0}}} ight) + {{bar phi }_2}left( {{x_i}} ight){W_{1i}}left( x ight)+ & qquadquad {{bar phi }_3}left( {{x_i}} ight){W_{{text{1i}}}}^prime left( x ight) + {{bar phi }_4}left( {{x_i}} ight){W_{{text{1i}}}}^{prime prime }left( x ight) + {{bar phi }_5}left( {{x_i}} ight){W_{1i}}^{prime prime prime }left( x ight) end{aligned} ight} $$  | (11) |
式中,
ight), {W}_{text{1i}}{}^{prime }left(x
ight), {W}_{text{1i}}{}^{prime text{}prime }left(x
ight), {W}_{1i}{}^{prime text{}prime text{}prime }left(x
ight) $

在第
ight) $

$$ left. begin{array}{l} {W_{1i}}left| {_{{x_i} = L_i^ - }} ight. = {W_{1i + 1}}left| {_{{x_{i + 1}} = {0^ + }}} ight. dfrac{{{partial ^2}{W_{1i}}}}{{partial x_i^2}} - dfrac{1}{R}dfrac{{partial {V_{1i}}}}{{partial {x_i}}}left| {_{{x_i} = L_i^ - }} ight. = dfrac{{{partial ^2}{W_{1i + 1}}}}{{partial x_{i + 1}^2}} - dfrac{1}{R}dfrac{{partial {V_{1i + 1}}}}{{partial {x_{i + 1}}}}left| {_{{x_{i + 1}} = {0^ + }}} ight. - left( {dfrac{{{partial ^3}{W_{1i}}}}{{partial x_i^3}} - dfrac{1}{R}dfrac{{{partial ^2}{V_{1i}}}}{{partial x_i^2}}} ight){Big|_{{x_i} = L_i^ - }} = - left( {dfrac{{{partial ^3}{W_{1i + 1}}}}{{partial x_{i + 1}^3}} - } ight.qquadleft. {dfrac{1}{R}dfrac{{{partial ^2}{V_{1i + 1}}}}{{partial x_{i + 1}^2}}} ight){{{Big|}}_{{x_{i + 1}} = {0^{{{ + }}}}}}{theta _{1i}}{Big|_{{x_i} = L_i^ - }} = - {J_i}EIleft( {dfrac{{{partial ^2}{W_{1i + 1}}}}{{partial x_{i + 1}^2}} - } ight.qquadleft. {dfrac{1}{R}dfrac{{partial {V_{1i + 1}}}}{{partial {x_{i + 1}}}}} ight){{{Big|}}_{{x_{i + 1}} = {0^{{ m{ + }}}}}} + {theta _{i + 1}}{{{Big|}}_{{x_{i + 1}} = {0^{{ m{ + }}}}}}end{array} ight} $$  | (12) |
$$ left. begin{gathered} {W_{1n}}left| {_{{x_n} = L_n^ - }} ight. = {W_{1n + 1}}left| {_{{x_{n + 1}} = L_{n + 1}^ - }} ight. hfill frac{{{partial ^2}{W_{1n}}}}{{partial x_n^2}} - frac{1}{R}frac{{partial {V_{1n}}}}{{partial {x_n}}}left| {_{{x_n} = L_n^ - }} ight. = frac{{{partial ^2}{W_{1n + 1}}}}{{partial x_{n + 1}^2}} - frac{1}{R}frac{{partial {V_{1n + 1}}}}{{partial {x_{n + 1}}}}left| {_{{x_{n + 1}} = L_{n + 1}^ - }} ight. hfill - left( {frac{{{partial ^3}{W_{1n}}}}{{partial x_n^3}} - frac{1}{R}frac{{{partial ^2}{V_{1n}}}}{{partial x_n^2}}} ight){Big|_{{x_n} = L_n^ - }} = frac{{{partial ^3}{W_{1n + 1}}}}{{partial x_{n + 1}^3}} - hfill qquadqquadfrac{1}{R}frac{{{partial ^2}{V_{1n + 1}}}}{{partial x_{n + 1}^2}}{{{Big|}}_{{x_{n + 1}} = L_{n + 1}^ - }}{theta _{1n}}{{{Big|}}_{{x_n} = L_n^ - }} = - {J_n}left( {frac{{{partial ^2}{W_{1n + 1}}}}{{partial x_{n + 1}^2}} - } ight. hfill left. {frac{1}{R}frac{{partial {V_{1n + 1}}}}{{partial {x_{n + 1}}}}} ight){Big|_{{x_{n + 1}} = L_{n + 1}^ - }} - {theta _{1n + 1}}{Big|_{{x_{n + 1}} = L_{n + 1}^ - }}end{gathered} ight} $$  | (13) |
式中,
ight)$





将局部格林函数式(11)带入传递关系式(12)和式(13)中可得到两个矩阵形式的传递方程
$$tag{14a} {{{boldsymbol{T}}}_{1i}}{{{boldsymbol{U}}}_i} = {{{boldsymbol{K}}}_i} + {{{boldsymbol{T}}}_{2i}}{{{boldsymbol{U}}}_{i + 1}} $$  |
$$tag{14b} {{{boldsymbol{T}}}_{1n}}{{{boldsymbol{U}}}_n} = {{{boldsymbol K}}_n} + {{{boldsymbol{T}}}_{2n}}{{{boldsymbol{U}}}_{n + 1}} $$  |
式中
$$begin{split}&{{{{boldsymbol{U}}}}_i} = {left[ {begin{array}{*{20}{c}} {{W_{1i}}left( x ight)}&{{W_{{text{1i}}}}^prime left( x ight)}&{{W_{{text{1i}}}}^{prime prime }left( x ight)}&{{W_{1i}}^{prime prime prime }left( x ight)} end{array}} ight]^{ m{T}}} & {{{{boldsymbol{T}}}}_{1i}} = left[ {begin{array}{*{20}{c}} {{boldsymbol{varPhi}} left( {{L_i}} ight)} {{{{boldsymbol{varphi}} '}}left( {{L_i}} ight)} { - {{{boldsymbol{varphi}} ''}}left( {{L_i}} ight)} {{{{boldsymbol{varphi}} }}left( {{L_i}} ight)} end{array}} ight] =end{split}$$  |
$$ begin{split} & qquad left[ {begin{array}{*{20}{c}} {{phi _2}left( {{L_i}} ight)}&{{phi _3}left( {{L_i}} ight)}&{{phi _4}left( {{L_i}} ight)}&{{phi _5}left( {{L_i}} ight)} {{{varphi '}_2}left( {{L_i}} ight)}&{{{varphi '}_3}left( {{L_i}} ight)}&{{{varphi '}_4}left( {{L_i}} ight)}&{{{varphi '}_5}left( {{L_i}} ight)} { - {{varphi ''}_2}left( {{L_i}} ight)}&{ - {{varphi ''}_3}left( {{L_i}} ight)}&{ - {{varphi ''}_4}left( {{L_i}} ight)}&{ - {{varphi ''}_5}left( {{L_i}} ight)} {{varphi _2}left( {{L_i}} ight)}&{{varphi _3}left( {{L_i}} ight)}&{{varphi _4}left( {{L_i}} ight)}&{{varphi _5}left( {{L_i}} ight)} end{array}} ight] & {{{{boldsymbol{T}}}}_{2i}} = left[ {begin{array}{*{20}{c}} {{boldsymbol{varPhi }}left( 0 ight)} {{{{boldsymbol{varphi}} '}}left( 0 ight)} { - {{{boldsymbol{varphi}} ''}}left( 0 ight)} {{{bar {boldsymbol{psi}} }}left( 0 ight)} end{array}} ight] = &qquad left[ {begin{array}{*{20}{c}} {{phi _2}left( 0 ight)}&{{phi _3}left( 0 ight)}&{{phi _4}left( 0 ight)}&{{phi _5}left( 0 ight)} {{{varphi '}_2}left( 0 ight)}&{{{varphi '}_3}left( 0 ight)}&{{{varphi '}_4}left( 0 ight)}&{{{varphi '}_5}left( 0 ight)} { - {{varphi ''}_2}left( 0 ight)}&{ - {{varphi ''}_3}left( 0 ight)}&{ - {{varphi ''}_4}left( 0 ight)}&{ - {{varphi ''}_5}left( 0 ight)} {{{bar psi }_{2i}}left( 0 ight)}&{{{bar psi }_{3i}}left( 0 ight)}&{{{bar psi }_{4i}}left( 0 ight)}&{{{bar psi }_{5i}}left( 0 ight)} end{array}} ight] & {{boldsymbol K}_i} = Hleft( { - {x_{i0}}} ight)left[ {begin{array}{*{20}{c}} {{phi _{11}}left( { - {x_{i0}}} ight)} {{{varphi '}_{11}}left( { - {x_{i0}}} ight)} { - {{varphi ''}_{11}}left( { - {x_{i0}}} ight)} {{{bar psi }_{1i}}left( { - {x_{i0}}} ight)} end{array}} ight] - &qquad Hleft( {{L_i} - {x_{i0}}} ight)left[ {begin{array}{*{20}{c}} {{phi _{11}}left( {{L_i} - {x_{i0}}} ight)} {{{varphi '}_{11}}left( {{L_i} - {x_{i0}}} ight)} { - {{varphi ''}_{11}}left( {{L_i} - {x_{i0}}} ight)} {{varphi _{1i}}left( {{L_i} - {x_{i0}}} ight)} end{array}} ight] [-20pt]end{split}$$  | (15) |
$$ begin{split} & {{{{boldsymbol{U}}}}_n} = {left[ {begin{array}{*{20}{c}} {{W_{1n}}left( x ight)}&{{W_{{text{1n}}}}^prime left( x ight)}&{{W_{{text{1n}}}}^{prime prime }left( x ight)}&{{W_{1n}}^{prime prime prime }left( x ight)} end{array}} ight]^{{{ m{T}}}}} & {{{{boldsymbol{T}}}}_{1n}} = left[ {begin{array}{*{20}{c}} {{{{boldsymbol{varPhi}} }}left( {{L_n}} ight)} {{{{boldsymbol{varphi}} '}}left( {{L_n}} ight)} { - {{{boldsymbol{varphi}} ''}}left( {{L_n}} ight)} {{{{boldsymbol{varphi}} }}left( {{L_n}} ight)} end{array}} ight] = & qquadleft[ {begin{array}{*{20}{c}} {{phi _2}left( {{L_n}} ight)}&{{phi _3}left( {{L_n}} ight)}&{{phi _4}left( {{L_n}} ight)}&{{phi _5}left( {{L_n}} ight)} {{{varphi '}_{text{2}}}left( {{L_n}} ight)}&{{{varphi '}_3}left( {{L_n}} ight)}&{{{varphi '}_4}left( {{L_n}} ight)}&{{{varphi '}_5}left( {{L_n}} ight)} { - {{varphi ''}_2}left( {{L_n}} ight)}&{ - {{varphi ''}_3}left( {{L_n}} ight)}&{ - {{varphi ''}_4}left( {{L_n}} ight)}&{ - {{varphi ''}_5}left( {{L_n}} ight)} {{varphi _2}left( {{L_n}} ight)}&{{varphi _3}left( {{L_n}} ight)}&{{varphi _4}left( {{L_n}} ight)}&{{varphi _5}left( {{L_n}} ight)} end{array}} ight] end{split} $$  |
$$ begin{split} & {{{{boldsymbol{T}}}}_{2n}} = left[ {begin{array}{*{20}{c}} {{{{boldsymbol{varPhi}} }}left( {{L_{n + 1}}} ight)} {{{{boldsymbol{varphi}} '}}left( {{L_{n + 1}}} ight)} {{{{boldsymbol{varphi}} ''}}left( {{L_{n + 1}}} ight)} { - {{{boldsymbol{psi}} }}left( {{L_{n + 1}}} ight)} end{array}} ight] = & ;;left[ {begin{array}{*{20}{c}} {{phi _2}left( {{L_{n + 1}}} ight)}&{{phi _3}left( {{L_{n + 1}}} ight)}&{{phi _4}left( {{L_{n + 1}}} ight)}&{{phi _5}left( {{L_{n + 1}}} ight)} {{{varphi '}_{text{2}}}left( {{L_{n + 1}}} ight)}&{{{varphi '}_3}left( {{L_{n + 1}}} ight)}&{{{varphi '}_4}left( {{L_{n + 1}}} ight)}&{{{varphi '}_5}left( {{L_{n + 1}}} ight)} {{{varphi ''}_2}left( {{L_{n + 1}}} ight)}&{{{varphi ''}_3}left( {{L_{n + 1}}} ight)}&{{{varphi ''}_4}left( {{L_{n + 1}}} ight)}&{{{varphi ''}_5}left( {{L_{n + 1}}} ight)} { - {psi _{2n}}left( {{L_{n + 1}}} ight)}&{ - {psi _{3n}}left( {{L_{n + 1}}} ight)}&{ - {psi _{4n}}left( {{L_{n + 1}}} ight)}&{ - {psi _{5n}}left( {{L_{n + 1}}} ight)} end{array}} ight] & {{{{boldsymbol{K}}}}_n} = Hleft( {{L_{n + 1}} - {x_{n + 10}}} ight)left[ {begin{array}{*{20}{c}} {{phi _{11}}left( {{L_{n + 1}} - {x_{n + 10}}} ight)} {{{varphi '}_{11}}left( {{L_{n + 1}} - {x_{n + 10}}} ight)} {{{varphi ''}_{11}}left( {{L_{n + 1}} - {x_{n + 10}}} ight)} { - {psi _{1n}}left( {{L_{n + 1}} - {x_{n + 10}}} ight)} end{array}} ight] - & qquad Hleft( {{L_n} - {x_{n0}}} ight)left[ {begin{array}{*{20}{c}} {{phi _{11}}left( {{L_n} - {x_{n0}}} ight)} {{{varphi '}_{11}}left( {{L_n} - {x_{n0}}} ight)} { - {{varphi ''}_{11}}left( {{L_n} - {x_{n0}}} ight)} {{varphi _{1n}}left( {{L_n} - {x_{n0}}} ight)} end{array}} ight][-15pt] end{split}$$  | (16) |
式中
$$ left. begin{aligned}&{phi }_{m}={{varphi }^{prime }}_{m}-frac{1}{R}{overline{varphi }}_{m}&{overline{psi }}_{mi}=-{J}_{i}EI{{phi }^{prime }}_{m} + {phi }_{m}& {psi }_{mn}={J}_{n}EI{{phi }^{prime }}_{m} + {phi }_{m}&left(m=1,2,{cdots},5;i=1,2,{cdots},n-1 ight)end{aligned} ight} $$  | (17) |
根据传递方程式(14a)和式(14b)建立未知常数向量


$$ begin{split}& {{boldsymbol{U}}_{n + 1}} = {left( {{{boldsymbol{T}}_{2n}}} ight)^{ - 1}}{{boldsymbol{T}}_{1n}}left[ {prodlimits_{j = 1}^{n - 1} {{{left( {{{boldsymbol{T}}_{2n - j}}} ight)}^{ - 1}}{{boldsymbol{T}}_{1n - j}}} } ight]{{boldsymbol{U}}_1} - &quad {left( {{{boldsymbol{T}}_{2n}}} ight)^{ - 1}}left[ {sumlimits_{k = 0}^{n - 2} {prodlimits_{l = 0}^k {{{boldsymbol{T}}_{1n - l}}{{left( {{{boldsymbol{T}}_{2n - l - 1}}} ight)}^{ - 1}}{{boldsymbol{K}}_{n - k - 1}}} } } ight] - {left( {{{boldsymbol{T}}_{2n}}} ight)^{ - 1}}{{boldsymbol{K}}_n} end{split} $$  | (18) |
考虑到本文采用的是悬臂式压电俘能器, 已知悬臂梁的边界条件是
$$ left. begin{aligned}&{W}_{11}left(0 ight)=0&{{W}^{prime }}_{1text{1}}left(0 ight)=0& {{W}^{″}}_{1n + 1}left(L ight)=0&{{W}^{?}}_{1n + 1}left(L ight)=0end{aligned} ight} $$  | (19) |
将边界条件(19)带入传递式(18)即可求解未知常数向量


因此, 可以得到所有局部坐标系下的格林函数, 转换坐标后, 含n个裂纹的曲梁压电俘能器的格林函数为
$$ {G_{text{1}}}left( {x,{x_0}} ight) = left{ begin{split} & {{bar G}_{11}}left( {{x_1};{x_{10}}} ight),;x in left[ {text{0}} ight.,left. {L_1^ - } ight) hfill & {{bar G}_{1i}}left( {x - sumlimits_{i = 1}^k {{L_i}} ;{x_{i0}}} ight),x in left( {{{left( {sumlimits_{i = 1}^{k - 1} {{L_i}} } ight)}^ + },{{left( {sumlimits_{i = 1}^k {{L_i}} } ight)}^ - }} ight) hfill & {{bar G}_{1n + 1}}left( {L - x;{x_{n + 10}}} ight),;x in left( {{{left( {sumlimits_{i = 1}^n {{L_i}} } ight)}^ + },L} ight] end{split} ight. $$  | (20) |
2.
损伤力电耦合系统解耦
根据线性系统和格林函数的叠加原理, 建立裂纹曲梁的力学位移与电力学方程之间的解析关系, 含裂纹曲梁压电俘能器的位移
ight) $

$$ begin{split}& Wleft( x ight) = {W_1}left( x ight) + {W_2}left( x ight) + {W_3}left( x ight) =&qquad int_0^L {Fleft( xi ight)left[ {{{bar G}_1}left( {{x_1};{x_{10}}} ight) + cdots + {{bar G}_i}left( {x - sumlimits_{i = 1}^k {{L_i}} ;{x_{i0}}} ight) + } ight.} &qquad left. {{{bar G}_{n + 1}}left( {L - x;{x_{n + 10}}} ight)} ight]xi { m{d}}xi + &qquad int_0^L {{G_2}left( {x;xi } ight)left[ {delta left( {xi - {x_1}} ight) - delta left( {xi - {x_2}} ight)} ight]{ m{d}}xi } + &qquad int_0^L {{G_{text{3}}}left( {x;xi } ight)left[ {Hleft( {xi - {x_1}} ight) - Hleft( {xi - {x_2}} ight)} ight]{ m{d}}xi } [-12pt]end{split} $$  | (21) |
假设在基础加速度作用下压电曲梁上的外力
ight) $

$$ Fleft( x ight) = left( {mu {varOmega ^2} - { m{i}}varOmega {c_1}} ight){A_0} $$  | (22) |
式中,

结合文献[22]中已知的输出电压和本文求解的多裂纹曲梁压电俘能器的格林函数解析式, 可以得到本模型的输出电压
$$ begin{split}& bar V = left( {mu {varOmega ^2} - { m{i}}varOmega {c_1}} ight){A_0}Bigg{ - int_{{x_1}}^{{x_2}} {Biggr[ {int_0^L {{{bar G}_1}left( {x;xi } ight){ m{d}}xi } + cdots + } Biggr.} &quad {Biggr. {int_0^L {{{bar G}_i}left( {x - sumlimits_{i = 1}^k {{L_i}} ;xi } ight){ m{d}}xi } + int_0^L {{{bar G}_{n + 1}}left( {L - x;xi } ight){ m{d}}xi } } Biggr]^{prime prime }}{ m{d}}x +H{A_1} +&quad { H{A_2}} Bigg}Bigg/left{ {frac{{{ m{i}}varOmega {C_p}{R_l} + 1}}{{{ m{i}}beta {C_p}{R_l}}} + int_{{x_1}}^{{x_2}} {left[ {{{tilde G''}_2}left( {x;{x_2}} ight) - {{tilde G''}_2}left( {x;{x_1}} ight)} ight]{ m{d}}x} } ight. +&quad { H{A_3} + H{A_4} + H{A_5} + H{A_6}} Bigg} [-10pt] end{split} $$  | (23) |
式中
$$tag{24a} begin{split} & H{A_1} = left( {frac{{mu {varOmega ^2} - { m{i}}varOmega {c_1}}}{{EA}} - frac{1}{{{R^2}}}} ight)displaystyleint_{{x_1}}^{{x_2}} {Biggr[ {displaystyleint_0^L {{{bar G}_1}left( {x;xi } ight){ m{d}}xi } + cdots + } Biggr.} &quad Biggr. {displaystyleint_0^L {{{bar G}_i}left( {x - sumlimits_{i = 1}^k {{L_i}} ;xi } ight){ m{d}}xi } + displaystyleint_0^L {{{bar G}_{n + 1}}left( {L - x;xi } ight){ m{d}}xi } } Biggr]{ m{d}}x end{split}$$  |
$$tag{24b}begin{split} & H{A_2} = - frac{{text{1}}}{{EA}}left( {{x_2} - {x_1}} ight)& H{A_3} = frac{{{vartheta _2}}}{{EAR}}left( {{x_1} - {x_2}} ight)end{split}$$  |
$$tag{24c} H{A_4} = - int_{{x_1}}^{{x_2}} {{{left[ {displaystyleint_0^L {{G_3}left( {x;xi } ight){ m{d}}xi } } ight]}^{prime prime }}{ m{d}}x} $$  |
$$tag{24d}H{A_5} = left( {frac{1}{{{R^2}}} + frac{{{ m{i}}varOmega {c_1} - mu {varOmega ^2}}}{{EA}}} ight)int_{{x_1}}^{{x_2}} {left[ {{{tilde G''}_2}left( {x;{x_2}} ight) - {{tilde G''}_2}left( {x;{x_1}} ight)} ight]{ m{d}}x} $$  |
$$tag{24e}H{A_6} = left( {frac{{mu {varOmega ^2} - { m{i}}varOmega {c_1}}}{{EA}} - frac{1}{{{R^2}}}} ight)int_{{x_1}}^{{x_2}} {int_0^L {{{tilde G''}_3}left( {x;xi } ight){ m{d}}xi } { m{d}}x}$$  |
因此, 压电俘能器的功率为
$$ P = {bar V^2}/{R_l} $$  |
3.
数值结果与讨论
本文探究了弧长



$$ {zeta _1} = frac{{{c_1}}}{{2mu {varOmega _0}}} $$  | (26) |
式中,
ho A} /{L^2} $

表
1
裂纹压电曲梁的几何参数和压电参数取值
Table
1.
Geometrical and electromechanical parameters of the cracked beam
table_type1 ">
| Parameters | Value | Parameters | Value |
| radius, R/m | 0.5 | resistance load, $ {R_l}/Omega $ | $ 1.0 times {10^6} $ |
| electrode start distance from the base, $ {x_1}/{text{m}} $ | 0 | electrode end distance from the base, $ {x_{text{2}}}/{text{m}} $ | 0.1 |
| Young’s modulus of substructure layer, $ {E_s}/{text{Pa}} $ | $ 1.0 times {10^{11}} $ | Young’s modulus of piezoelectric layer, $ {E_p}/{text{Pa}} $ | $ 6.6 times {10^{10}} $ |
| piezoelectric constant, ${d_{31} }/({text{m} } cdot { {text{V} }^{ { { - 1} } } } )$ | ${{ - 1} }{text{.90} } times {10^{10} }$ | permittivity ${varepsilon _{33} }/({text{nF} } cdot { {text{m} }^{ - 1} })$ | 15.93 |
下载: 导出CSV
|显示表格
3.1
解的有效性验证
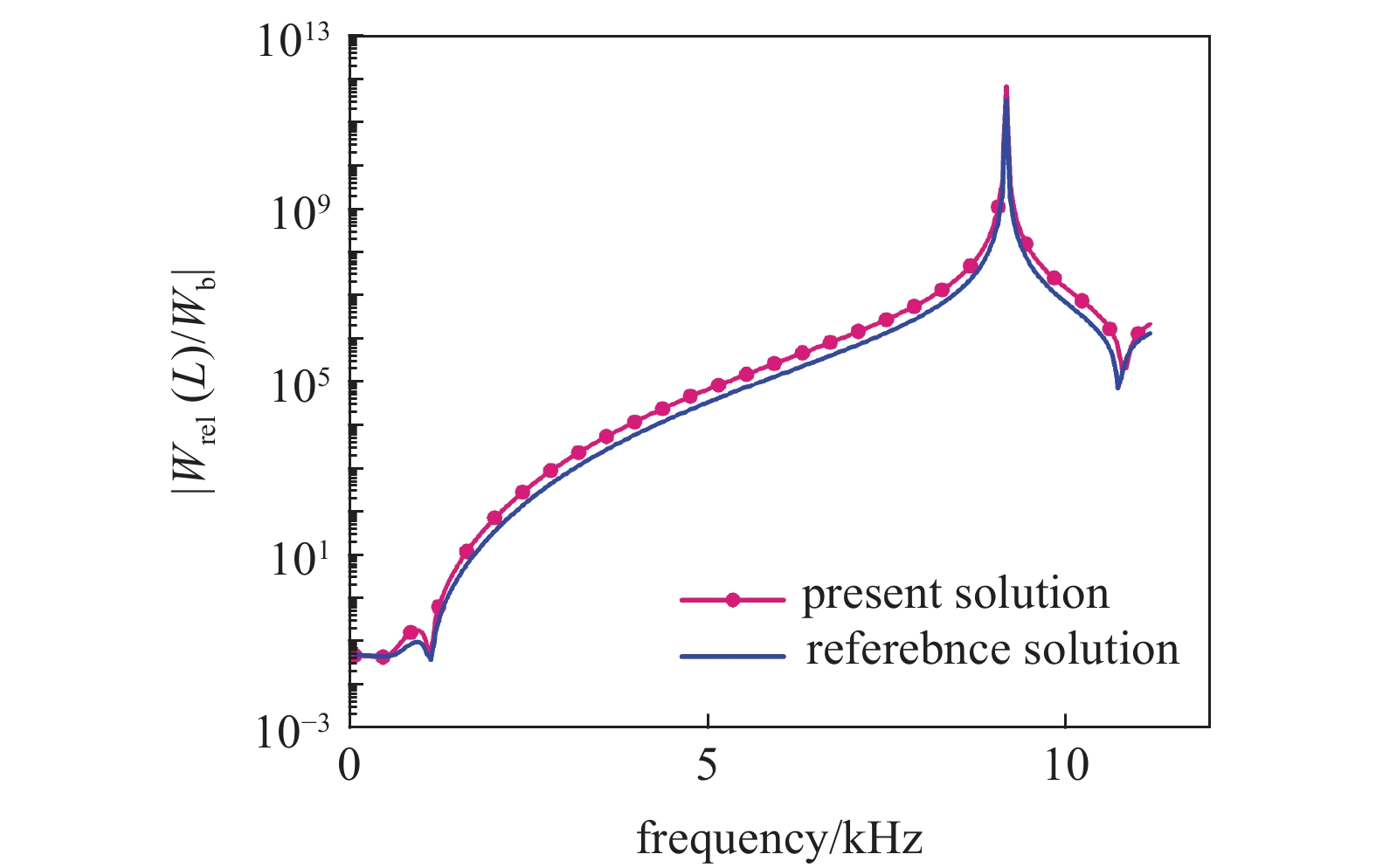
令裂纹深度为零, 含裂纹的曲梁可退化为完整曲梁模型. 利用这一点将含裂纹压电曲梁的解析解与文献[22]得到的完整压电曲梁模型的解作对比, 验证结果是否一致. 如图2所示, 本文的位移频率响应结果与文献中的结果基本吻合, 从而验证了本文解的有效性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
位移?频率响应的对比图
Figure
2.
The displacement for comparison of present solutions and the solutions from reference
下载: 全尺寸图片
幻灯片
3.2
裂纹损伤对压电俘能器电压?频率响应的影响
本节探究了压电俘能器电压响应在裂纹几何参数影响下的变化. 一方面为相关设计提供了理论依据, 另一方面介绍了如何通过电压响应的变化对结构进行损伤监测.
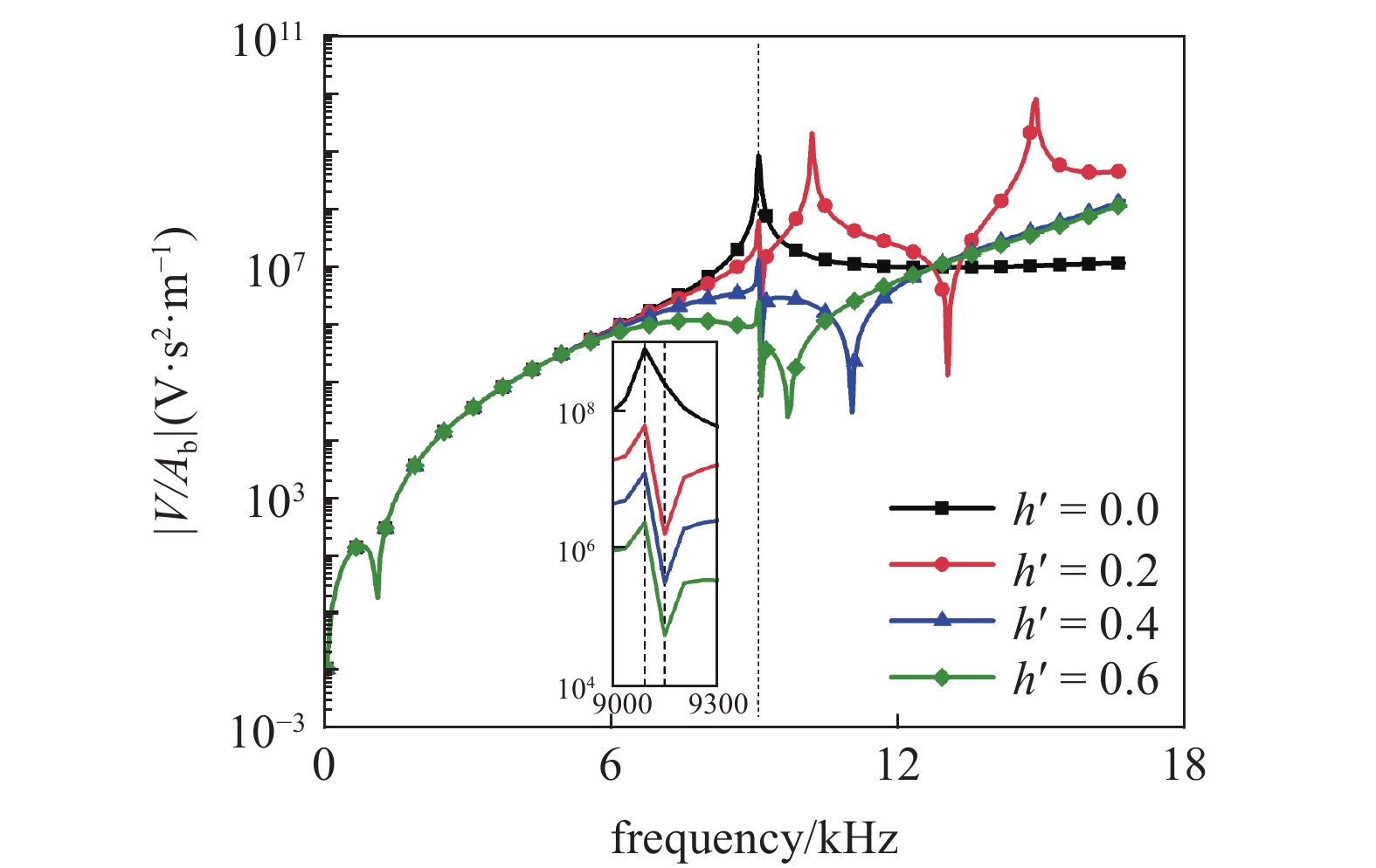
图3绘制了不同裂纹深度时压电俘能器的电压?频率响应图. 从图中可以看出, 频率在到5 kHz的时候, 各裂纹深度的电压响应之间有重叠部分. 当振动频率大于此重叠频率振动时, 损伤压电曲梁的响应效果与完整曲梁有了显著差异. 第一阶频率9088.6 Hz (虚线处)的峰值随着裂纹深度加深成比例的减小, 很快激励出二阶频率9144.4 Hz, 峰值的波动较小并且同样成比例减小深度加深至0.7左右后, 一阶频率甚至出现在9088.6 Hz之前, 且峰值极低. 特别说明, 此时的二阶频率9144.4 Hz时开路条件下压电曲梁的一阶频率值.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
不同裂纹深度的电压?频率响应(L1 = 0.06 m)
Figure
3.
The voltage frequency responses with different crack depths (L1 = 0.06 m)
下载: 全尺寸图片
幻灯片
对于浅裂纹(


裂纹损伤可能会出现在曲梁结构的任何位置, 由图3可知, 裂纹深度的深浅引起的电压?频率响应变化的差别较大. 因此在研究俘能器在裂纹位置变化下的电压响应时, 分别考虑了浅裂纹和深裂纹两种情况.
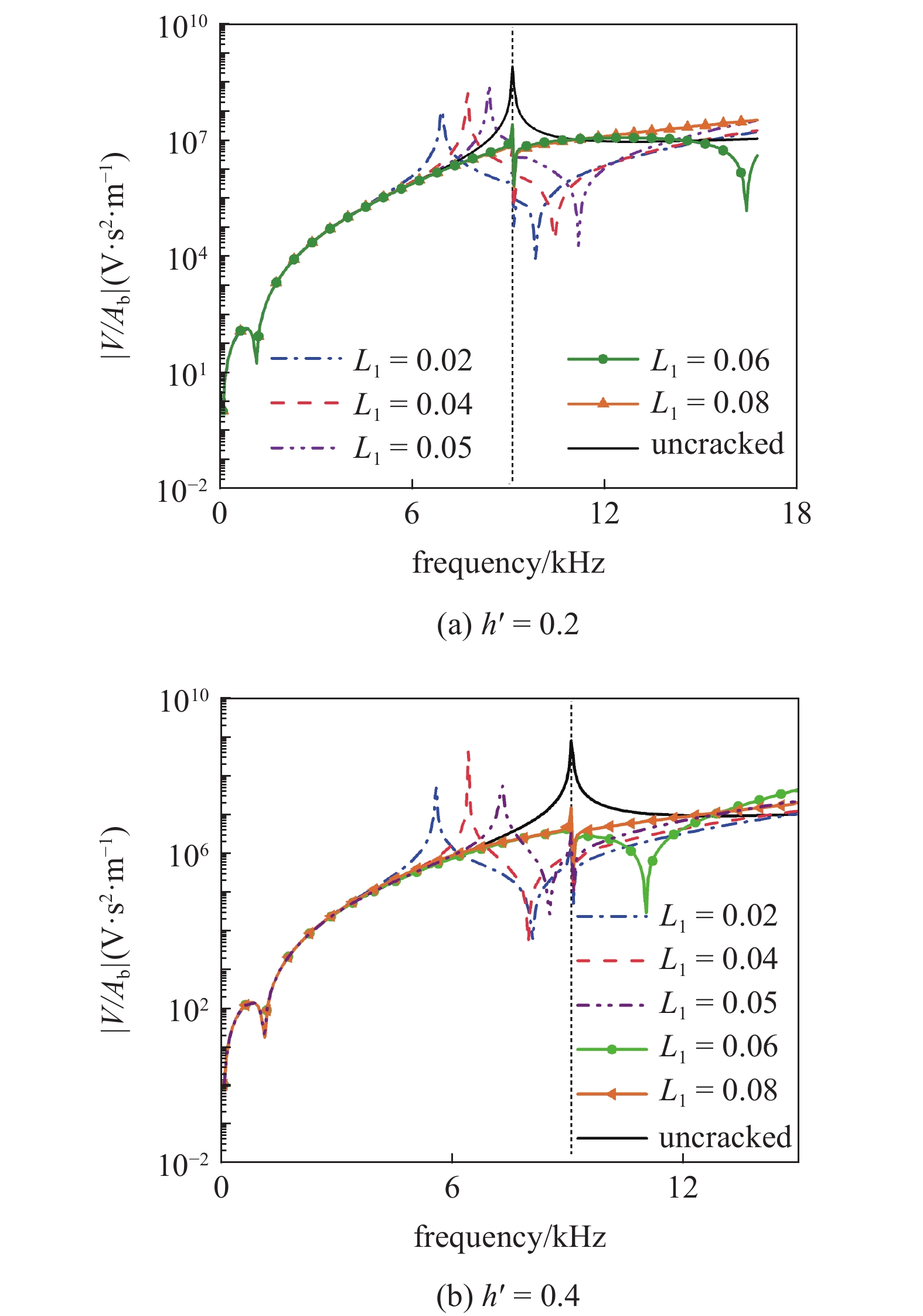
如图4所示, 随着裂纹位置不断从曲梁固定端靠近曲梁中部, 一阶固有频率逐渐增加. 但在图4(a)中, 一阶频率的峰值会不断增大, 二阶频率9088.6 Hz和三阶频率9144.4 Hz的峰值变大, 且四阶频率也向右偏移. 而在图4(b)中, 压电俘能器在9088.6 Hz前就被激励出了一阶和二阶频率, 且频率皆向右偏移. 当裂纹位置从曲梁中部不断靠近曲梁的自由端时, 一阶频率和二阶频率仍是9088.6 Hz和9144.4 Hz, 且峰值变大, 而三阶频率同样发生向右偏移.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
不同裂纹位置下的电压?频率响应
Figure
4.
The voltage frequency responses with different crack locations
下载: 全尺寸图片
幻灯片
总的来说, 不同裂纹深度和位置的损伤曲梁压电俘能器的电压响应的趋势是一致的, 不同的是被激励出的频率以及峰值.
因此想要检测结构的损伤情况, 就要根据结构振动响应引起的俘能器的电压响应变化. 一旦有裂纹出现, 健康曲梁的一阶频率就不再是损伤曲梁的一阶频率, 且随着裂纹加深该频率处峰值变小, 由此可以判断出出现损伤时裂纹的深度情况. 如若损伤曲梁被激励出的一阶频率小于健康曲梁的频率, 说明曲梁的固定端到中部这一段结构中出现了裂纹, 此时的裂纹深度也可以根据损伤曲梁是否在健康曲梁的一阶频率值前出现反向峰值的二阶频率. 相反, 如若损伤曲梁被激励出的一阶频率等于健康曲梁的一阶频率, 则损伤出现的范围在曲梁的中部至自由端. 至此, 本文提出的根据结构振动引起的压电俘能器信号响应变化监测结构损伤的逆方法得以验证.
从上述裂纹几何参数对压电俘能器电压响应的分析中可以看出, 在很多情况下固有频率都会发生偏移. 因此, 利用固有频率是否发生偏移这一条件仅能够监测结构中是否有损伤产生, 并不能准确检测出结构的损伤情况.
3.3
阻尼比对损伤压电曲梁电压?频率响应的影响
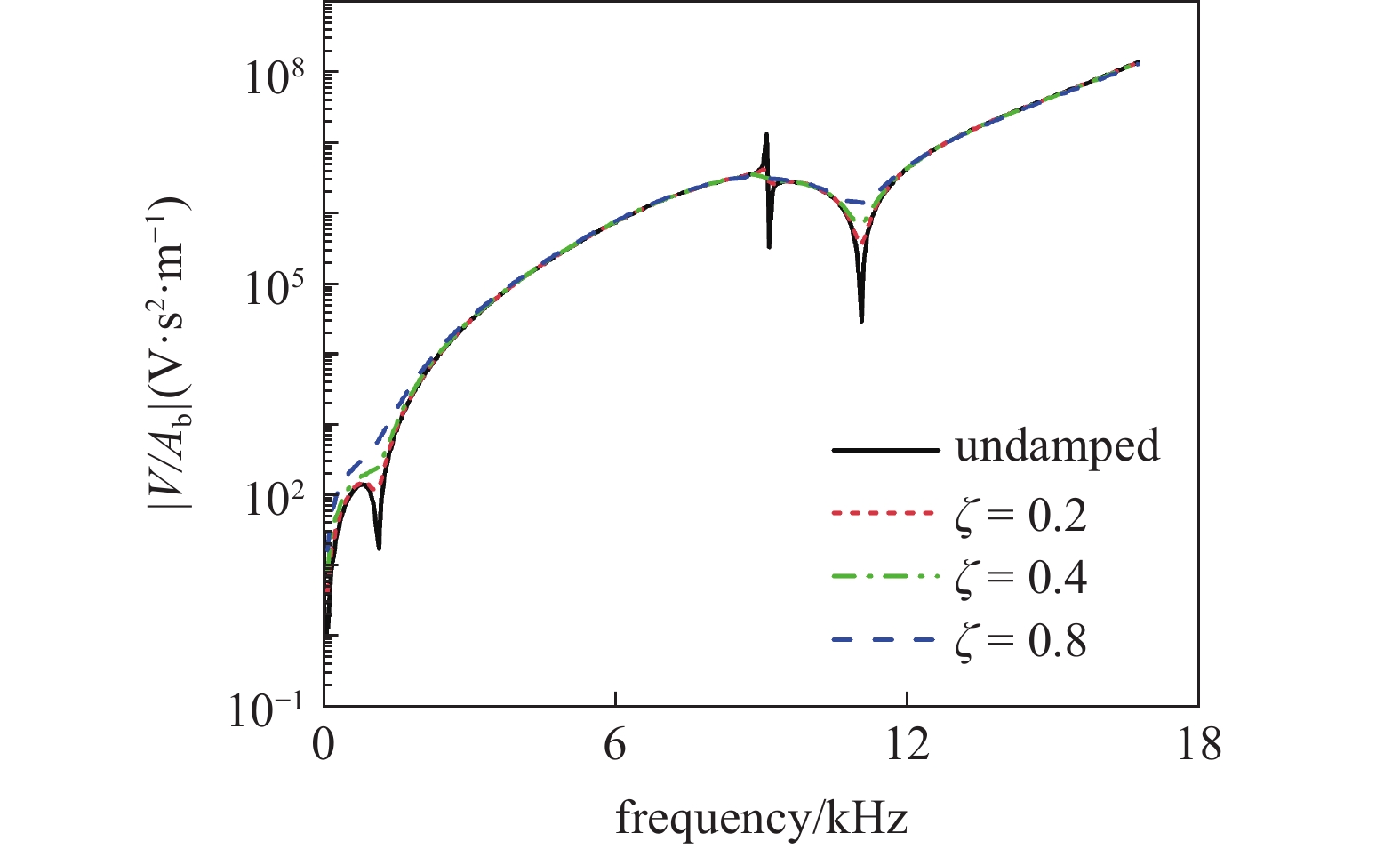
考虑到结构中阻尼的影响不可忽视, 研究了电压与阻尼之间的关系, 以预测在有阻尼的压电曲梁发生裂纹损伤时可能出现的情况. 从图5中可以看出随着阻尼增大, 电压响应如预期般减小. 在阻尼比取值到0.8时, 共振峰基本消失, 响应曲线趋于平缓. 并且几乎在所有情况下, 引入阻尼都会降低电压.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
不同阻尼比下的电压?频率响应(L1 = 0.04 m, h’ = 0.4)
Figure
5.
The voltage frequency responses with different damping coefficients ( L1 = 0.04 m , h’ = 0.4)
下载: 全尺寸图片
幻灯片
3.4
功率对损伤压电曲梁电压?频率响应的影响
图6绘制了不同裂纹深度下压电曲梁的输出功率的频率响应. 可以看出功率响应的变化情况与图3电压响应变化相同, 在一阶、二阶频率处的峰值也是成比例减小.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-452-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
不同裂纹深度下的功率?频率响应(L1 = 0.06 m)
Figure
6.
The frequency responses of electric power with difference crack depth (L1 = 0.06 m)
下载: 全尺寸图片
幻灯片
4.
结 论
本文重点研究了裂纹损伤的曲梁压电俘能器的力电耦合强迫振动, 运用格林函数法推导出该振动问题的解析解. 在数值计算中, 通过与健康压电曲梁的文献解进行对比, 验证了解的有效性. 最后通过研究曲梁压电俘能器在裂纹几何参数影响下电压响应变化情况对结构进行损伤监测, 得出结论:
(1) 裂纹出现时, 损伤曲梁的电压响应在健康曲梁的一阶频率处成比例变小, 且随即被激励出二阶频率;
(2)通过对电压响应的监测可以确定的损伤裂纹的深度和在结构中出现的位置范围, 证明了逆方法的可行性;
(3)通过监测由振动响应引起的俘能器电压变化能准确地反映结构的健康状况.
