引 言
振动同步可以表征为运动系统根据内部子系统之间的耦合效应调整特征量的变化频率, 并使子系统的位移、速度等变量具有一致性和统一性. 近年来, 由于同步在非线性耦合混沌系统[1-2]、复杂网络系统[3]、多轴控制系统[4-5]、振动筛系统[6-7]等工程技术中具有很高的应用价值和良好的应用前景, 已成为国内外重要科学研究课题之一. 特别是在振动筛分领域, 自20世纪中叶前苏联****Blekhanm首次对两相同激振器同步给出理论解释[8]后, 利用偏心转子同步激励振动质体便开始用于实现物料的筛选与分级. 按照振动筛的振动轨迹分类, 至今共发展了四类振动筛: 圆振动筛、直线同步振动筛、平动椭圆同步振动筛和双轨迹同步振动筛[9]. 在整个振动系统中, 激振电机的同步状态是影响振动筛工作效率的核心因素.
目前针对振动系统同步机理和实验的研究主要侧重于单频激励多电机振动系统. 比如, 赵春雨等[10-11]根据异步电机运动学原理导出以角转速为变量的电磁转矩表达式, 从而进一步探究振动系统在同转速偏心块激励下的动力学行为和同步稳定性理论, 并有效解决了若干工程实际问题. 通过将刚性转子安装在两个弹性阻尼支座上, Sperling等[12]提出一种带有双平面自动平衡装置的转子同步模型, 并根据运动方程进行数值计算后发现, 当转子速度高于系统最大共振转速范围时, 系统可以有效补偿刚性转子的离心力和不平衡力矩从而获得同步振动. Balthazar等[13-14]基于数值模拟定量地分析了非线性振动系统中4个非理想激振器安装于柔性支撑结构的同步运动, 表明在共振频率阶段的Sommerfeld效应显著影响激振电机的同步性. 上述****从振动力学理论角度研究了单频自同步振动系统的同步机理, 但是忽略了系统的机电耦合动力特性. 针对机电耦合诱导的单频振动系统同步传动行为, 侯勇俊等[15-16]考虑电机系统与振动机械系统之间的相互影响, 采用转子动力学理论成功构造三机椭圆振动系统的机电耦合数学模型, 揭示转子与振动质体间同步传动的机电耦合机理. 方潘等[17]在侯勇俊的研究基础上将振动电机视为与摆杆耦合的摆动电机, 并成功把单自由度转子耦合摆装置同步问题转化为研究质体瞬时响应解的存在性和稳定性. 然而, 该系统受限于质体单一振动方向而不适用于实际筛分工程. 所以文献[18-19]更深入探讨了多转子耦合摆电机的多自由度振动同步特性, 并引入相邻交叉耦合控制策略实现系统的椭圆筛分轨迹和零相位控制同步. Zhang等[20-22]运用非线性动力学理论推导了多个同频驱动转子与圆柱滚子耦合的同步运动方程, 并结合实验平台讨论了滚子与转子之间的同步传动机理与动态特性. 以上研究仅仅阐述了由相同激振器驱动振动机械的动力学理论, 将它们应用到振动筛分工程后发现, 物料的筛分能力并没有得到显著提升. 主要原因是不同粒径颗粒在单一频率激励下受到相同激振力作用, 一旦形成筛网堵塞将会影响系统透筛率. 而倍频振动系统单周期内由于受到不同形式的激振力, 物料运动更为活跃的同时有助于减小筛堵概率.
针对振动系统的双频同步行为已有****做出一些试探性研究, 以提高系统物料分级与筛分能力. Modrzewski和Wodzinski[23-24]设计了3种不同类型振动筛用于研究矿物废弃物的分离特性, 实验对比表明双频系统的同步行为和筛选能力优于其他振动结构, 但是缺乏振动系统的理论支撑. 姚运仕等[25-26]则提出了一种采用单电机轮系传动方式实现激振器两种不同频率的强迫同步, 然而受激振器回转振动和箱体振动的影响, 轮系承受较大的冲击载荷和惯性载荷容易引发齿轮疲劳失效. 冯忠绪等[27]引入运动学微分方程阐述了双频振动筛的工作原理, 却并没有对双频振动系统的模型做出修正, 缺陷依然存在. 因此, 有必要采用双频激励多电机自同步振动系统(激振器之间无强迫同步的轮系)来实现双频振动系统的同步运动, 以提高振动筛的寿命与可靠性. 根据振动系统的能量传递过程, 文献[28]引入Lyapunov一次近似理论从数学上证明了双转子二倍频系统实现稳定同步运动是可行的, 但忽视了结构参数变化对系统动力学特性和同步运动状态的影响. Zou等[9,29]虽然根据同步性条件讨论了远共振系统中双电机倍频同步范围, 并从同步控制角度出发利用计算机仿真实现稳定零相位差控制同步, 但是并没有通过数值计算定量探讨系统的内在耦合特性, 同时缺乏实验验证其研究的正确性, 无法全面揭示振动系统的双频同步机理.
综上所述, 现有研究对倍频激励双转子振动同步机理和动力学特性分析尚未明确, 从而对系统的同步溯源缺少充分的理论依据. 本文将围绕倍频振动系统的振动同步机理、同步特征参数定量计算、模拟仿真以及振动实验测试四个方面展开研究. 重点讨论了转子偏心质量、电机安装位置、支撑弹簧刚度以及偏心半径等参数对系统倍频同步状态的影响, 通过实验平台对不同工况下的箱体以及转子动力学特性进行深入比较与分析, 验证了倍频振动同步理论研究的正确性, 为研制新型非常规轨迹的振动机械提供了较好的理论依据.
1.
数学模型及运动微分方程
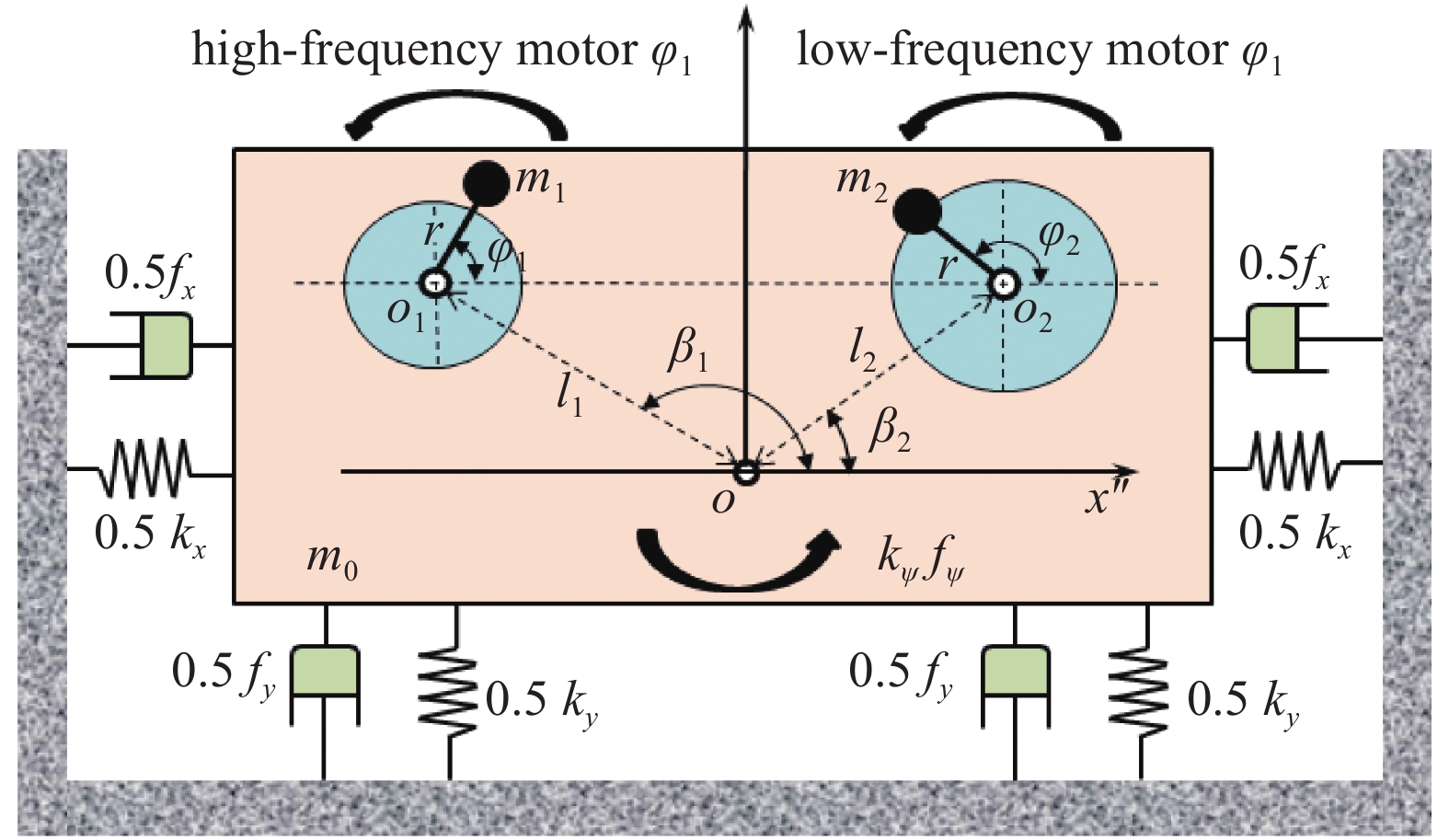
为掌握电机驱动偏心转子之间的倍频同步运动机制, 研究箱体沿各自由度的动力学响应, 本节旨在推导出振动系统的运动微分方程. 如下图1所示为倍频激励双转子振动系统力学模型. 质量为m0的箱体与系统基座之间采用4个压缩弹簧进行弹性连接, 其中弹簧元件沿x, y, ψ自由度的刚度系数分别考虑为kx, ky, kψ, 阻尼系数fx, fy, fψ分别表征弹簧在能量释放和吸收过程中沿x, y, ψ方向上的能量耗散. 高频激振电机(即二极感应电机1)和低频激振电机(即四极感应电机2)固定安装于箱体之上, 分别以转速

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
倍频激励双转子振动系统数学模型
Figure
1.
Mathematical model of the vibration system actuated with double-frequency and dual-rotor
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
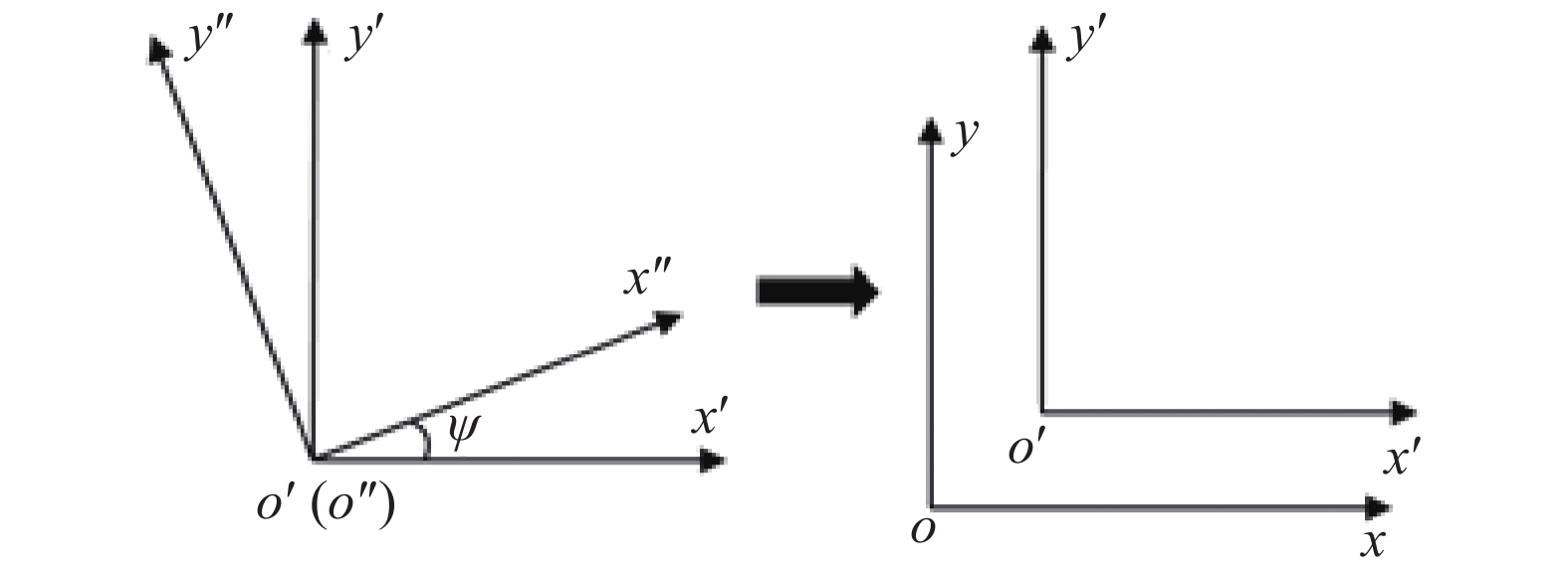
坐标转换原则
Figure
2.
Principle of coordinate transformation
下载: 全尺寸图片
幻灯片
当系统处于振动状态时, 高频转子坐标矩阵Φ1″和低频转子坐标矩阵Φ2″在动态坐标系x″o″y″中可分别描述为
$$left.begin{split} &{{boldsymbol{varPhi }}_1}^{prime prime } = left[ begin{gathered}{l_1}cos {beta _1} + rcos {varphi _1} {l_1}sin {beta _1} + rsin {varphi _1} end{gathered} ight] &{{boldsymbol{varPhi }}_2}^{prime prime } = left[ begin{gathered}{l_2}cos {beta _2} + rcos {varphi _2} {l_2}sin {beta _2} + rsin {varphi _2} end{gathered} ight] end{split} ight} $$  | (1) |
动态坐标系x″o″y″固定于箱体之上, 实时地跟随系统作位移振动和摆动; 移动坐标系x′o′y′可通过x″o″y″绕质心o″旋转得到; 固定坐标系xoy可通过移动x′o′y′得到. Φi和Φi″的坐标矩阵转换方程为
$$left.begin{split}& {{boldsymbol{varPhi }}_i} = left[ begin{gathered}x y end{gathered} ight] + {boldsymbol{K}}{{boldsymbol{varPhi }}_i}^{prime prime };&{boldsymbol{K}} = left[ begin{gathered}cos psi ;;; - sin psi sin psi ;;;cos psi end{gathered} ight] end{split} ight}$$  | (2) |
式中, Φi为第i个转子的固定坐标矩阵; [x y]T为系统质心沿x, y方向的幅值矩阵; K为变换矩阵. 根据式(1)和式(2), 获得各转子在平面xoy内的固定坐标
$$ left.begin{split} &{{boldsymbol{varPhi }}_1} = left[ begin{gathered}x + {l_1}cos {text{(}}{beta _1} + psi {text{)}} + rcos {text{(}}{varphi _1} + psi {text{)}} y + {l_1}{text{sin(}}{beta _1} + psi {text{)}} + r{text{sin(}}{varphi _1} + psi {text{)}} end{gathered} ight] &{{boldsymbol{varPhi }}_2} = left[ begin{gathered}x + {l_2}cos {text{(}}{beta _2} + psi {text{)}} + rcos {text{(}}{varphi _2} + psi {text{)}} y + {l_2}{text{sin(}}{beta _2} + psi {text{)}} + r{text{sin(}}{varphi _2} + psi {text{)}} end{gathered} ight] end{split} ight}$$  | (3) |
分析整个振动系统的能量转化过程, 由转子驱动箱体产生的系统总动能E为
$$ begin{split} &E = frac{1}{2}{m_0}{{dot x}^2} + frac{1}{2}{m_0}{{dot y}^2} + frac{1}{2}{J_{text{m}}}{{dot psi }^2} + frac{1}{2}sumlimits_{i = 1}^2 {{J_i}{{dot varphi }_i}^2} + &qquadfrac{1}{2}sumlimits_{i = 1}^2 {{m_i}{boldsymbol{dot varPhi }}_i^{text{T}}{{{boldsymbol{dot varPhi }}}_i}} end{split} $$  | (4) |
式中,

$$ U = frac{1}{2}{k_x}{x^2} + frac{1}{2}{k_y}{y^2} + frac{1}{2}{k_psi }{psi ^2} $$  | (5) |
考虑各电机轴的摩擦系数分别是f1, f2, 则由电机轴的摩擦转动以及弹簧能量吸收和释放过程中形成的系统总耗散能D为
$$ D = frac{1}{2}{f_x}{dot x^2} + frac{1}{2}{f_y}{dot y^2} + frac{1}{2}{f_psi }{dot psi ^2} + frac{1}{2}{f_1}{dot varphi _1}^2 + frac{1}{2}{f_2}{dot varphi _2}^2 $$  | (6) |
倍频激励双电机振动系统是一个完整系统, 将系统的广义坐标矩阵和各自由度的广义力矩阵分别考虑为q = [x y ψ φ1 φ2]和Q = [0 0 0 Me1?Re1 Me2?Re2]. 同时引入下列广义Lagrange方程建立力学模型的运动微分方程[20]
$$ frac{{ m{d}}}{{{ m{d}}t}}left( {frac{{partial E}}{{partial {boldsymbol{dot q}}}}} ight) - frac{{partial (E - U)}}{{partial {boldsymbol{q}}}} + frac{{partial D}}{{partial {boldsymbol{dot q}}}} = {boldsymbol{Q}} $$  | (7) |
在振动工程应用中, 箱体的质量远远大于偏心块的质量, 即m0


$$ left.begin{split} &Mddot x + {f_x}dot x + {k_x}x = sumlimits_{i = 1}^2 {{m_i}r{text{(}}{{dot varphi }_i}^{text{2}}{text{cos}}{varphi _i} + {{ddot varphi }_i}{text{sin}}{varphi _i}{text{)}}} &Mddot y + {f_y}dot y + {k_y}y = sumlimits_{i = 1}^2 {{m_i}r{text{(}}{{dot varphi }_i}^{text{2}}{text{sin}}{varphi _i} - {{ddot varphi }_i}{text{cos}}{varphi _i}{text{)}}} &{J_{text{m}}}ddot psi + {f_psi }dot psi + {k_psi }psi = &qquadsumlimits_{i = 1}^2 {{m_i}r{l_i}{text{[}}{{dot varphi }_i}^{text{2}}{text{sin(}}{varphi _i} - {beta _i}{text{)}} - {{ddot varphi }_i}{text{cos(}}{varphi _i} - {beta _i}{text{)]}}} &{J_1}{{ddot varphi }_1} = {M_{{text{e1}}}} - {R_{{text{e}}1}} + {m_1}r{text{[}}ddot x{text{sin}}{varphi _1} - ddot y{text{cos}}{varphi _1} - &qquad{l_1}ddot psi {text{cos(}}{varphi _1} - {beta _1}{text{)}} - {l_1}{{dot psi }^{text{2}}}{text{sin(}}{varphi _1} - {beta _1}{text{)]}} &{J_2}{{ddot varphi }_2} = {M_{{text{e}}2}} - {R_{{text{e}}2}} + {m_2}r{text{[}}ddot x{text{sin}}{varphi _2} - ddot y{text{cos}}{varphi _2} - &qquad {l_2}ddot psi {text{cos(}}{varphi _2} - {beta _2}{text{)}} - {l_2}{{dot psi }^{text{2}}}{text{sin(}}{varphi _2} - {beta _2}{text{)]}} end{split} ight} $$  | (8) |
式中,


2.
倍频振动同步机理
2.1
系统各自由度响应近似解
式(8)是关于x, y, ψ, φ1, φ2的动力学耦合方程. 若两个转子均以各自额定转速同步振动时, 激振电机作为系统驱动源同样分别以角速度




$$ left.begin{split} &{eta _{12}} = {m_1}/{m_2},;{eta _2} = {m_2}/M;&{r_{l1}} = {l_1}/{l_{text{e}}},;{r_{l2}} = {l_2}/{l_{text{e}}} &{r_{text{o}}} = r/{l_{text{e}}},;{lambda _x} = {omega _x}/{omega _{text{m}}};&{lambda _y} = {omega _y}/{omega _{text{m}}},;{lambda _psi } = {omega _psi }/{omega _{text{m}}} &{xi _x} = {f_x}/bigg(2sqrt {{k_x}M}bigg) &{xi _y} = 2{f_y}sqrt {{k_y}M};&{xi _psi } = {f_psi }/bigg(2sqrt {{k_psi }{J_{text{m}}}}bigg) end{split} ight}$$  | (9) |
式中,




$$ left.begin{split} &ddot x + 2{xi _x}{omega _x}dot x + {omega _x}^2x = {eta _2}{eta _{12}}r{{dot varphi }_1}^{text{2}}{text{cos}}{varphi _1} + {eta _2}r{{dot varphi }_2}^{text{2}}{text{cos}}{varphi _2} &ddot y + 2{xi _y}{omega _y}dot y + {omega _y}^2y = {eta _2}{eta _{12}}r{{dot varphi }_1}^{text{2}}{text{sin}}{varphi _1} + {eta _2}r{{dot varphi }_2}^{text{2}}{text{sin}}{varphi _2} &ddot psi + 2{xi _psi }{omega _psi }dot psi + {omega _psi }^2psi = {eta _2}{eta _{12}}{r_{text{o}}}{r_{l1}}{{dot varphi }_1}^{text{2}}{text{sin(}}{varphi _1} - {beta _1}{text{)}} + &qquad {eta _2}{r_{text{o}}}{r_{l2}}{{dot varphi }_2}^{text{2}}{text{sin(}}{varphi _2} - {beta _2}{text{)}} end{split} ight}$$  | (10) |
采用复变函数规则求解[30], 可推导出箱体的周期性幅值响应解为
$$ left.begin{split} &x = - {eta _2}{eta _{12}}r{ ho _{x1}}{text{cos(}}{varphi _1} + {gamma _{x1}}{text{)}} - {eta _2}r{ ho _{x2}}{text{cos(}}{varphi _2} + {gamma _{x2}}{text{)}} &y = - {eta _2}{eta _{12}}r{ ho _{y1}}{text{sin(}}{varphi _1} + {gamma _{y1}}{text{)}} - {eta _2}r{ ho _{y2}}{text{sin(}}{varphi _2} + {gamma _{y2}}{text{)}} &psi = - {eta _2}{eta _{12}}{r_{text{o}}}{r_{l1}}{ ho _{psi 1}}{text{sin(}}{varphi _1} - {beta _1} + {gamma _{psi 1}}{text{)}} - &qquad {eta _2}{r_{text{o}}}{r_{l2}}{ ho _{psi 2}}{text{sin(}}{varphi _2} - {beta _2} + {gamma _{psi 2}}{text{)}} end{split} ight}$$  | (11) |
其中
$$ left.begin{split} &{ ho _{c1}} = frac{1}{{sqrt {{{(1 - {lambda _c^2}/4)}^{text{2}}} + {{({xi _c}{lambda _c})}^{text{2}}}} }} &{ ho _{c2}} = frac{1}{{sqrt {{{{text{(}}1 - {lambda _c^2}{text{)}}}^{text{2}}} + {{{text{(}}2{xi _c}{lambda _c}{text{)}}}^{text{2}}}} }} &{gamma _{c1}} = arctan frac{{{xi _c}{lambda _c}}}{{1 - {lambda _c^{text{2}}}/4}},;{gamma _{c2}} = arctan frac{{2{xi _c}{lambda _c}}}{{1 - {lambda _c^2}}} end{split} ight}$$  | (12) |
式中,
ho _{c1}} $

ho _{c2}} $



2.2
系统倍频自同步准则
通过偏心块间相位差的变化趋势可反映出两台激振电机的同步特性, 从而揭示振动系统的动力学特征. 在同步振动过程中, 以低频电机的特性参数为基准, 两转子的平均相位为φ = (φ1/2+φ2)/2. 高频转子与低频转子的瞬时相位角可分别表示如下
$$left. begin{split}&{varphi _1}{text{ = 2}}(varphi {text{ + }}{alpha _0});&{varphi _2}{text{ = }}varphi - {alpha _0}end{split} ight}$$  | (13) |
在单频激励的振动系统中, 其同步稳定性通过转子间的真实相位差值表示. 然而在倍频激励的振动同步系统中, 真实相位差φ1?φ2 = φ+3α0是一个关于时间t的函数, 即φ1?φ2不稳定, 无法用于揭示倍频同步机理. 因此, 考虑到两振动电机的转速关系, 可定义倍频激励振动系统的相位差为
$$ alpha = {varphi _1} - 2{varphi _2} = 4{alpha _0} $$  | (14) |
依据修正的小参数平均法[10,20], 虽然转子平均角速度


$$ {omega _{text{m}}} = frac{1}{T}int_t^{t + T} {dot varphi } {text{(}}t{text{)d}}t = {text{const}}{text{.}} $$  | (15) |
引入扰动参数ε1与ε2分别表征


$$ left. begin{split}&dot varphi {text{ = }}(1{text{ + }}{varepsilon _1}){omega _{text{m}}};;;&dot alpha {text{ = }}{varepsilon _2}{omega _{text{m}}} end{split} ight}$$  | (16) |
同时, 确定各激振器的角速度


$$ left.begin{split} &{{dot varphi }_1}{text{ = 2}}(1{text{ + }}{varepsilon _1} + {varepsilon _2}){omega _{text{m}}};;;&{{dot varphi }_2}{text{ = }}({text{1 + }}{varepsilon _1} - {varepsilon _2}){omega _{text{m}}} &{{ddot varphi }_1}{text{ = 2}}({{dot varepsilon }_1} + {{dot varepsilon }_2}){omega _{text{m}}};;;&{{ddot varphi }_2}{text{ = }}({{dot varepsilon }_1} - {{dot varepsilon }_2}){omega _{text{m}}} end{split} ight} $$  | (17) |
当系统达到同步振动时, 偏心块的转速不产生变化, 说明电机的负载转矩近似等于电磁转矩, 即实际输出转矩与驱动转矩达到动态平衡的状态. 而在能量传递和能量耦合振动过程中, 电机的电磁转矩值是时变的, 需要通过转子1和2在周期T内的微分运动方程的积分平均值来表征. 因此先采用式(11)计算得到参数

$$left.begin{split} &{text{2}}{J_1}{omega _{text{m}}}{{dot {bar varepsilon }}_1} + {text{2}}{J_1}{omega _{text{m}}}{{dot {bar varepsilon }}_2} = &qquad a_{11}^prime {{dot {bar varepsilon }}_1} + a_{12}^prime {{dot {bar varepsilon }}_2} - {a_{11}}{{bar varepsilon }_1} - {a_{12}}{{bar varepsilon }_2} + {a_1} = {P_1} &{J_2}{omega _{text{m}}}{{dot {bar varepsilon }}_1} - {J_2}{omega _{text{m}}}{{dot {bar varepsilon }}_2} = &qquad a_{21}^prime {{dot {bar varepsilon }}_1} - a_{22}^prime {{dot {bar varepsilon }}_2} - {a_{21}}{{bar varepsilon }_1} + {a_{22}}{{bar varepsilon }_2} + {a_2} = {P_2} end{split} ight}$$  | (18) |
式中
$$ left.begin{split} &a_{11}^prime = a_{12}^prime = {m_2}{r^{text{2}}}{omega _{text{m}}}{W_{{text{c}}1}}&a_{21}^prime = a_{22}^prime ={frac{1}{2}}{m_2}{r^{text{2}}}{omega _{text{m}}}{W_{{text{c}}2}} &{a_{11}} = {text{4}}{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}1}} + {text{2}}{f_1}{omega _{text{m}}} + &qquad {frac{1}{2}}{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{H_1}{text{sin}}(bar alpha - {beta _1} + 2{beta _2} - 2{gamma _{psi 2}}) &{a_{12}} = 4{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}1}} + {text{2}}{f_1}{omega _{text{m}}} - &qquad {frac{1}{2}} {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{H_1}{text{sin}}(bar alpha - {beta _1} + 2{beta _2} - 2{gamma _{psi 2}}) &{a_1} = {{bar M}_{{text{e}}1}} - {text{2}}{f_1}{omega _{text{m}}} - {text{2}}{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}1}} - &qquad {frac{1}{4}}{boldsymbol{}}{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{H_1}{text{sin}}(bar alpha - {beta _1} + 2{beta _2} - 2{gamma _{psi 2}}) &{a_{21}} = {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}2}} + {f_2}{omega _{text{m}}} - &qquad {text{2}}{m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{H_2}{text{sin(}}bar alpha - {beta _1} + 2{beta _2} + {gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{a_{22}} = {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}2}} + {f_2}{omega _{text{m}}} &{a_2} = {{bar M}_{{{ m{e}}} 2}} - {f_2}{omega _{text{m}}} - {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{W_{{text{s}}2}} + &qquad {frac{1}{2}} {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{H_2}{text{sin(}}bar alpha - {beta _1} + 2{beta _2} + {gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{W_{{text{c}}1}} = {eta _2}{eta _{12}}^{text{2}}{text{(}}{ ho _{x1}}{text{cos}}{gamma _{x1}} + { ho _{y1}}{text{cos}}{gamma _{y1}} + {r_{l1}}^{text{2}}{ ho _{psi 1}}{text{cos}}{gamma _{psi 1}}{text{)}} &{W_{{text{s}}1}} = {eta _2}{eta _{12}}^{text{2}}{text{(}}{ ho _{x1}}{text{sin}}{gamma _{x1}} + { ho _{y1}}{text{sin}}{gamma _{y1}} + {r_{l1}}^{text{2}}{ ho _{psi 1}}{text{sin}}{gamma _{psi 1}}{text{)}} &{H_1} = {eta _{12}}{eta _2}^{text{2}}{r_{text{o}}}{r_{l1}}{r_{l2}}^{text{2}}{ ho _{psi 2}}^{text{2}};&{H_2} = {eta _{12}}{eta _2}^{text{2}}{ ho _{psi 1}}{ ho _{psi 2}}{r_{text{o}}}{r_{l1}}{r_{l2}}^{text{2}} &{W_{{text{c}}2}} = {eta _2}{text{(}}{ ho _{x2}}{text{cos}}{gamma _{x2}} + { ho _{y2}}{text{cos}}{gamma _{y2}} + {r_{l2}}^{text{2}}{ ho _{psi 2}}{text{cos}}{gamma _{psi 2}}{text{)}} &{W_{{text{s}}2}} = {eta _2}{text{(}}{ ho _{x2}}{text{sin}}{gamma _{x2}} + { ho _{y2}}{text{sin}}{gamma _{y2}} + {r_{l2}}^{text{2}}{ ho _{psi 2}}{text{sin}}{gamma _{psi 2}}{text{)}} end{split} ight}$$  | (19) |
方程(18)中系数ai, aij, a′ij (i = 1, 2; j = 1, 2)是由一系列参数Wsi, Wci, Hi和



$$ bar {()}= frac{1}{T}int_t^{t + T} { {()}{text{d}}t} $$  | (20) |
若振动电机分别以各自额定速度



$$left. begin{split}&{bar M_{{text{e}}1}} = {M_1} - {k_1}{text{(}}{bar varepsilon _{text{1}}} + {bar varepsilon _{text{2}}}{text{)}};;;&{bar M_{{text{e}}2}} = {M_2} - {k_2}{text{(}}{bar varepsilon _{text{1}}} - {bar varepsilon _{text{2}}}{text{)}}end{split} ight}$$  | (21) |
其中
$$left. begin{split}& {M_i} = {n_{{text{p}}i}}frac{{L_{{text{m}}i}^2U_{text{s}}^2}}{{L_{{text{s}}i}^2{R_{{text{r}}i}}}}{text{(}}{omega _{text{s}}} - {n_{{ m{p}}i}}{omega _i}{text{) }};;;&{k_i} = n_{{text{p}}i}^2frac{{L_{{text{m}}i}^2U_{text{s}}^2}}{{L_{{text{s}}i}^2{omega _{text{s}}}{R_{{text{r}}i}}}}end{split} ight} $$  | (22) |
式中, Mi是电机i的输入转矩; ki 是电机i在额定转速运行时的刚度系数; npi 是电机i的磁极对数, np1 = 1, np2 = 2; Lmi和Lsi 分别是电机i的互感系数和定子电感; Rri 是电机i的转子阻抗; Us 是电机额定电压; ωi 是电机i的额定激振频率; ωs 是电网供电频率.
重新整理方程(18), 将其写成与电磁转矩有关的一阶微分方程的矩阵形式
$$ {boldsymbol{P}}dot {bar {boldsymbol{varepsilon}}} = {boldsymbol{Q}}bar {boldsymbol{varepsilon}} + {boldsymbol{R}} $$  | (23) |
其中
$$ left.begin{split} &{boldsymbol{P}} = left[ {begin{array}{*{20}{c}}{{J_1}{omega _{text{m}}} - a_{11}^prime }&{{text{2}}{J_1}{omega _{text{m}}} - a_{12}^prime } {{J_2}{omega _{text{m}}} - a_{21}^prime }&{ - {J_2}{omega _{text{m}}} + a_{22}^prime } end{array}} ight];&{boldsymbol{Q}} = left[ {begin{array}{*{20}{c}}{ - {a_{11}}}&{ - {a_{12}}} { - {a_{21}}}&{{a_{22}}} end{array}} ight] &{boldsymbol{R}} = {left[ {begin{array}{*{20}{c}}{{a_1}}&{{a_2}} end{array}} ight]^{ m{T}}};&{dot{bar {boldsymbol varepsilon }}} = {left[ {begin{array}{*{20}{c}}{{{dot {bar varepsilon }}_1}}&{{{dot {bar varepsilon }}_2}} end{array}} ight]^{ m{T}}};&{bar{boldsymbol varepsilon }} = {left[ {begin{array}{*{20}{c}}{{{bar varepsilon }_1}}&{{{bar varepsilon }_2}} end{array}} ight]^{ m{T}}} end{split} ight}$$  | (24) |
式中, 方程(23)称为振动系统耦合方程, 反映了倍频激励下两个偏心块之间的耦合运动关系. P为与转子加速度有关的惯性耦合矩阵; Q为与转子角速度有关的刚度耦合矩阵; R为各电机轴上的电磁转矩与负载转矩之差. 当激振器之间达到稳定的同步振动, 扰动参数矩阵



$$ left.begin{split} &{{bar M}_{{text{e}}1}} + {{bar M}_{{text{e}}2}} - {omega _{text{m}}}{text{(2}}{f_1} + {f_2}{text{)}} - {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{text{[2}}{W_{{text{s}}1}} + frac{1}{2}{W_{{text{s}}2}} + &qquad{W_{{text{c}}0}}{text{sin(}}bar alpha + {theta _{{text{c}}0}}{text{)}} + {W_{{text{s}}0}}{text{sin(}}bar alpha + {theta _{{text{s}}0}}{text{)]}} = 0 &{{bar M}_{{text{e}}1}} - {{bar M}_{{text{e}}2}} - {omega _{text{m}}}{text{(2}}{f_1} - {f_2}{text{)}} - {m_2}{r^{text{2}}}{omega _{text{m}}}^{text{2}}{text{[2}}{W_{{text{s}}1}} - frac{1}{2}{W_{{text{s}}2}} + &qquad{W_{text{c}}}{text{sin(}}bar alpha + {theta _{text{c}}}{text{)}} + {W_{text{s}}}{text{sin(}}bar alpha + {theta _{text{s}}}{text{)]}} = 0 end{split} ight} $$  | (25) |
式中
$$ begin{split} &{W_{text{c}}} = sqrt {{a_{text{c}}}^{text{2}} + {b_{text{c}}}^{text{2}}};&{W_{text{s}}} = sqrt {{a_{text{s}}}^{text{2}} + {b_{text{s}}}^{text{2}}} ; &{W_{{text{c}}0}} = sqrt {{a_{{text{c}}0}}^{text{2}} + {b_{{text{c}}0}}^{text{2}}};&{W_{{text{s}}0}} = sqrt {{a_{{text{s}}0}}^{text{2}} + {b_{{text{s}}0}}^{text{2}}} &{a_{text{c}}} ={frac{1}{4}} {H_1}{text{cos}}({beta _1} - 2{beta _2}){text{cos}}(2{gamma _{psi 2}}) + &qquad {H_2}{text{cos(}}{beta _1} - 2{beta _2}{text{)cos(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{b_{text{c}}} = {frac{1}{4}}- {H_1}{text{sin}}({beta _1} - 2{beta _2}){text{cos}}(2{gamma _{psi 2}}) - &qquad{H_2}{text{sin(}}{beta _1} - 2{beta _2}{text{)cos(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} end{split} $$  |
$$ begin{split} &{a_{text{s}}} = -{frac{1}{4}} {H_1}{text{sin(}}{beta _1} - 2{beta _2}){text{sin}}(2{gamma _{psi 2}}) + & {H_2}{text{sin(}}{beta _1} - 2{beta _2}{text{)sin(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{b_{text{s}}} = -{frac{1}{4}} {H_1}{text{cos}}({beta _1} - 2{beta _2}){text{sin}}(2{gamma _{psi 2}}) + &qquad{H_2}{text{cos(}}{beta _1} - 2{beta _2}{text{)sin(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{a_{{text{c}}0}} = {frac{1}{4}}{H_1}{text{cos}}({beta _1} - 2{beta _2}){text{cos}}(2{gamma _{psi 2}}) - &qquad {H_2}{text{cos(}}{beta _1} - 2{beta _2}{text{)cos(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{b_{{text{c}}0}} = -{frac{1}{4}} {H_1}{text{sin}}({beta _1} - 2{beta _2}){text{cos}}(2{gamma _{psi 2}}) + &qquad {H_2}{text{sin(}}{beta _1} - 2{beta _2}{text{)cos(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{a_{{text{s}}0}} = -{frac{1}{4}} {H_1}{text{sin(}}{beta _1} - 2{beta _2}){text{sin}}(2{gamma _{psi 2}} )- &qquad {H_2}{text{sin(}}{beta _1} - 2{beta _2}{text{)sin(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{b_{{text{s}}0}} = -{frac{1}{4}} {H_1}{text{cos}}({beta _1} - 2{beta _2}){text{sin}}(2{gamma _{psi 2}}) - &qquad {H_2}{text{cos(}}{beta _1} - 2{beta _2}{text{)sin(}}{gamma _{psi 1}} - {gamma _{psi 2}}{text{)}} &{theta _{text{c}}} = left{ {begin{array}{*{20}{l}}{arctan ({b_{text{c}}}/{a_{text{c}}}),;{a_{text{c}}} geqslant 0} {{text{π}} + arctan ({b_{text{c}}}/{a_{text{c}}}),;{a_{text{c}}} < 0} end{array}} ight.; &{theta _{text{s}}} = left{ {begin{array}{*{20}{l}}{arctan ({b_{text{s}}}/{a_{text{s}}}),;{a_{text{s}}} geqslant 0} {{text{π}} + arctan ({b_{text{s}}}/{a_{text{s}}}),;{a_{text{s}}} < 0} end{array}} ight. &{theta _{{text{c}}0}} = left{ {begin{array}{*{20}{l}}{arctan ({b_{{text{c}}0}}/{a_{{text{c}}0}}),;{a_{{text{c}}0}} geqslant 0} {{text{π}} + arctan ({b_{{text{c}}0}}/{a_{{text{c}}0}}),;{a_{{text{c}}0}} < 0} end{array}} ight. &;{theta _{{text{s}}0}} = left{ {begin{array}{*{20}{l}}{arctan( {b_{{text{s}}0}}/{a_{{text{s}}0}}),;{a_{text{s0}}} geqslant 0} {{text{π}} + arctan ({b_{{text{s}}0}}/{a_{{text{s}}0}}),;{a_{text{s0}}} < 0} end{array}} ight. end{split} $$  | (26) |
通过分析方程(25)可以确定振动系统倍频激励下的自同步准则. 第一式



$$left.begin{split} &{T_{text{d}}} = {T_{{text{syn}}}}{text{sin(}}bar alpha + {theta _{text{c}}}{text{) }};;;&bar alpha = arcsin left(frac{{{T_{text{d}}}}}{{{T_{{text{syn}}}}}} ight) - {theta _{text{c}}} end{split} ight}$$  | (27) |
其中
$$ left.begin{split} &{T_{text{d}}} = {T_{{text{r}}1}} - {T_{{text{r}}2}}&{T_{{text{r}}1}} = {{bar M}_{{text{e}}1}} - {text{2}}{f_1}{omega _{text{m}}} - {text{2}}{m_2}{r^{text{2}}}{omega _{text{m}}^{text{2}}}{W_{{text{s}}1}} &{T_{{text{syn}}}} = {m_2}{r^{text{2}}}{omega^{{2}} _{text{m}}}{W_{text{c}}}&{T_{{text{r}}2}} = {{bar M}_{{text{e}}2}} - {f_2}{omega _{text{m}}} -{frac{1}{2}} {m_2}{r^{text{2}}}{omega _{text{m}}^{text{2}}}{W_{{text{s}}2}} end{split} ight} $$  | (28) |
式中, Tri为电机i的剩余转矩; Td为两电机间的剩余转矩之差; Tsyn为系统实现倍频同步的同步转矩. 由式(27)可以看出, 振动系统在倍频激励下的同步相位差值

$$ left| {{T_{text{d}}}} ight| leqslant left| {{T_{{text{syn}}}}} ight| $$  | (29) |
作为实现倍频同步振动的必要条件, 两台电机之间输出剩余转矩差的绝对值不能超过系统达到倍频同步的同步转矩. 两台激振器之间的同步转矩越大, 系统实现同步运行越理想, 利用数值解法即可求出式(27)中倍频激励下的同步相位差.
为充分理解具有双频率激励特点的系统同步能力, 规定倍频同步能力指数ξ
$$ xi = left| {frac{{{M_{text{L}}}}}{{{T_{{text{syn}}}}}}} ight| $$  | (30) |
式中,

2.3
系统倍频同步稳定判据
根据式(27)反解得出的相位差可能会存在多解的情况, 其中哪一个值具有同步状态的稳定性, 使得系统能够以二倍激励频率稳定地同步振动, 需要利用Poincare?Lyapunov方法确定[17]. 即考虑Pi存在一组特定参数

$$ left| begin{gathered}frac{{partial left( {{P_1} - {P_n}} ight)}}{{partial {alpha _1}}} - delta {text{ }}frac{{partial left( {{P_1} - {P_n}} ight)}}{{partial {alpha _2}}}{text{ }} cdots {text{ }}frac{{partial left( {{P_1} - {P_n}} ight)}}{{partial {alpha _{n - 1}}}} frac{{partial left( {{P_2} - {P_n}} ight)}}{{partial {alpha _1}}}{text{ }}frac{{partial left( {{P_2} - {P_n}} ight)}}{{partial {alpha _2}}} - delta {text{ }} cdots {text{ }}frac{{partial left( {{P_2} - {P_k}} ight)}}{{partial {alpha _{n - 1}}}} cdots {text{ }} cdots frac{{partial left( {{P_{n - 1}} - {P_n}} ight)}}{{partial {alpha _1}}}{text{ }}frac{{partial left( {{P_{n - 1}} - {P_n}} ight)}}{{partial {alpha _2}}}{text{ }} cdots ;frac{{partial left( {{P_{n - 1}} - {P_n}} ight)}}{{partial {alpha _{n - 1}}}} - delta end{gathered} ight| = 0 $$  | (31) |
若上述行列式的特征根δi (i = 1, 2, ···, n?1)实部全部是负值, 则参数

结合式(18)和式(31), 由倍频激励双偏心块的同步稳定判别式可写为
$$ frac{{partial {text{(}}{P_1} - {P_2}{text{)}}}}{{partial bar alpha }} = - {m_2}{r^{text{2}}}{omega _{text{m}}^{text{2}}}{W_{text{c}}}{text{cos(}}bar alpha + {theta _{text{c}}}{text{)}} < 0 $$  | (32) |
转子同步状态的稳定性决定振动系统的动力学特性, 各自由度的瞬态响应解的稳定性依赖于振动电机的安装参数、支承弹簧的刚度系数和偏心质量等. 系统参数同时满足式(29)和式(32)的前提条件下, 稳定的倍频同步振动能够获得, 即式(27)的稳态相位差


$$ {W_{text{c}}}{text{cos(}}bar alpha + {theta _{text{c}}}{text{)}} > 0 $$  | (33) |
3.
数值计算与讨论
第2节以数学推导的方式详细探究了倍频转子间的同步性与稳定性判据以及远共振系统的动态耦合机理. 可知, 系统的同步运动特性主要取决于转子的质量比、振动电机位置结构和弹簧刚度等参数. 针对转子同步状态与系统各参数之间的关系, 本节将运用数值计算对其进行定量的讨论. 分析结果为后续倍频激励双转子系统的机电耦合动力学模拟和同步特性实验研究提供重要的理论依据. 为便于计算, 考虑两电机安装距离l1 = l2 = l, 即rl1 = rl2 = rl. 系统基本参数值如下: m0 = 92 kg, m1 = 2 kg, Jm = 10 kg·m2, m2 = 2 ~ 3.5 kg (η2 = 0.02 ~ 0.035), β1 = 2π/3 ~ 5π/6 rad, β2 = π/6 ~ π/3 rad, fx = fy = 300 ~ 3000 N·s/m, fψ = 50 ~ 500 N·m·s/rad (ξx = ξy = ξψ = 0.03 ~ 0.5), kx = ky = 1 × 103 ~ 2 × 107 N/m, kψ = 1 × 102 ~ 5 × 106 N·m/rad (λx = λy = λψ = 0.02 ~ 2.85), l = 0 ~ 3.6 m (rl = 0 ~ 12).
3.1
振动同步范围分析
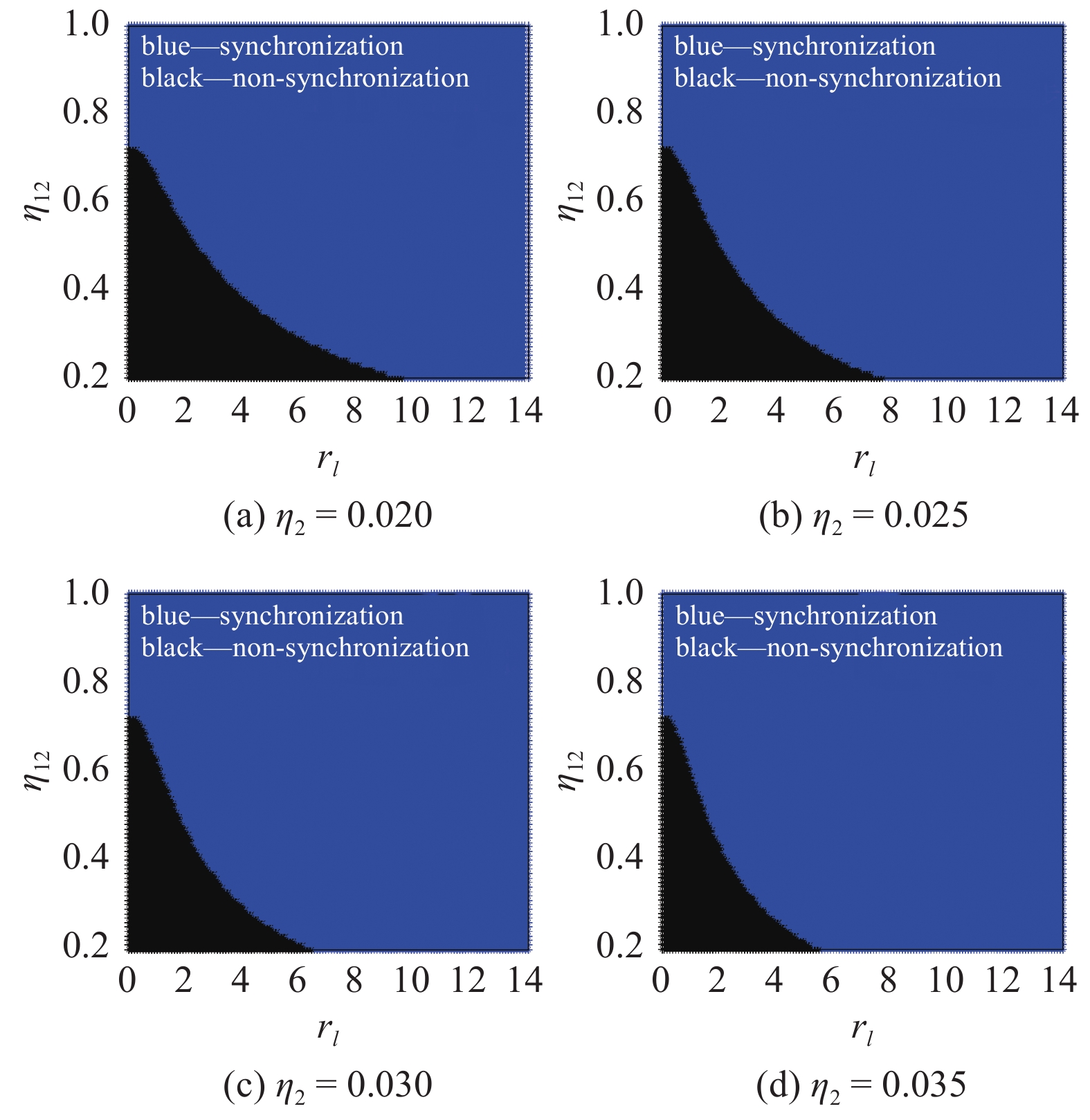
根据式(29), 高频转子与低频转子之间的同步条件可以通过转子输出剩余转矩差和系统同步转矩的关系来反映. 设安装距离rl以及激振器质量比η12为自由变量, 在转子2的不同偏心质量下出现同步运动的区域如图2和图3所示. 当系统结构参数无法满足同步运动准则时的非同步区域用黑色指示标记, 蓝色范围表示系统在此状态下可以出现同步振动. 可见, 倍频激励下双转子同步区域远远大于不适用于同步运动准则的区域. 振动电机轴至系统质心的安装距离与激振器质量比越大, 两电机之间更容易获得倍频同步运动. 同时, 随着低频转子偏心质量的增加, 双频振动系统的非同步范围逐渐减小. 由此可知, 实现不同频率之间同步振动的可行性受结构参数的影响. 在实际工程应用中, 通过选择有效的系统参数, 可以满足振动系统不同的同步特性和工业要求.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
倍频激励双转子振动同步范围
Figure
3.
Synchronization region of two rotors driven by double-frequency
下载: 全尺寸图片
幻灯片
3.2
倍频同步能力分析
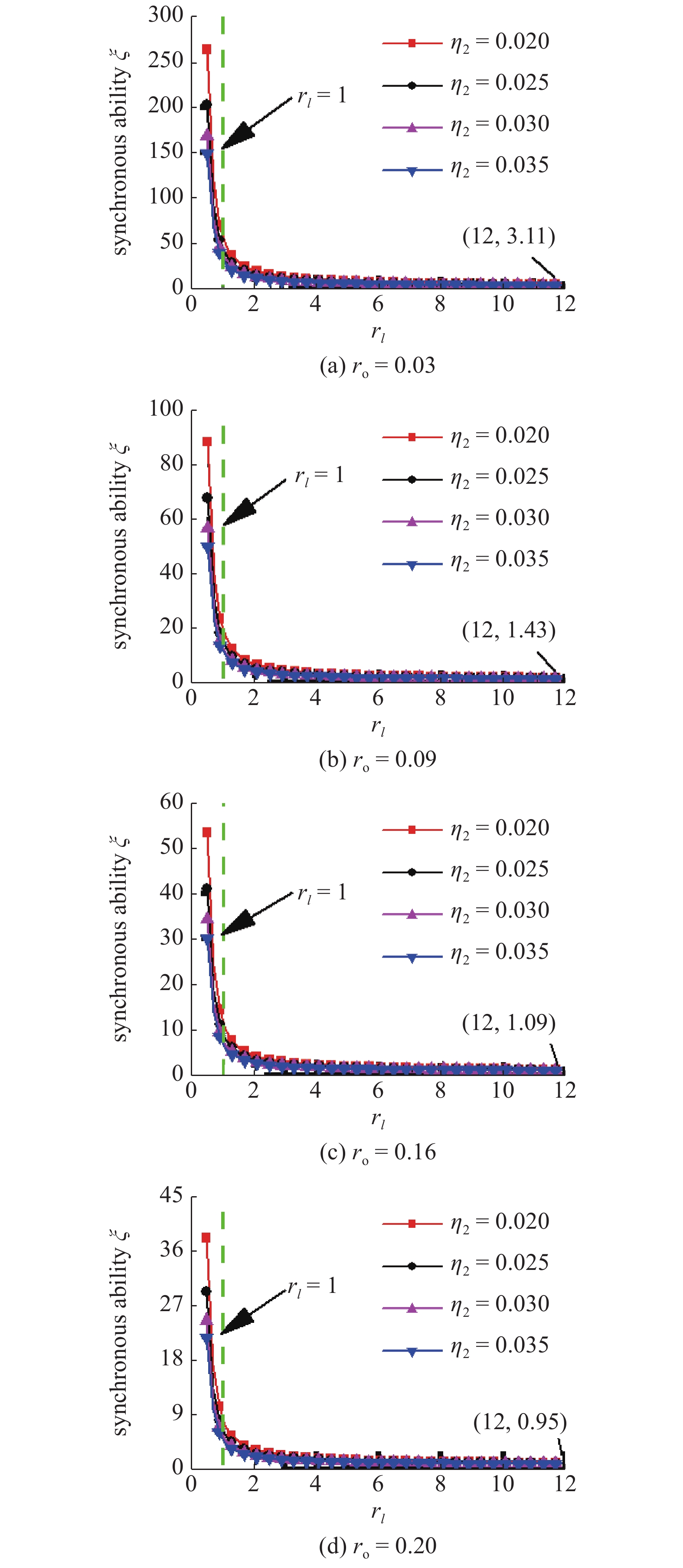
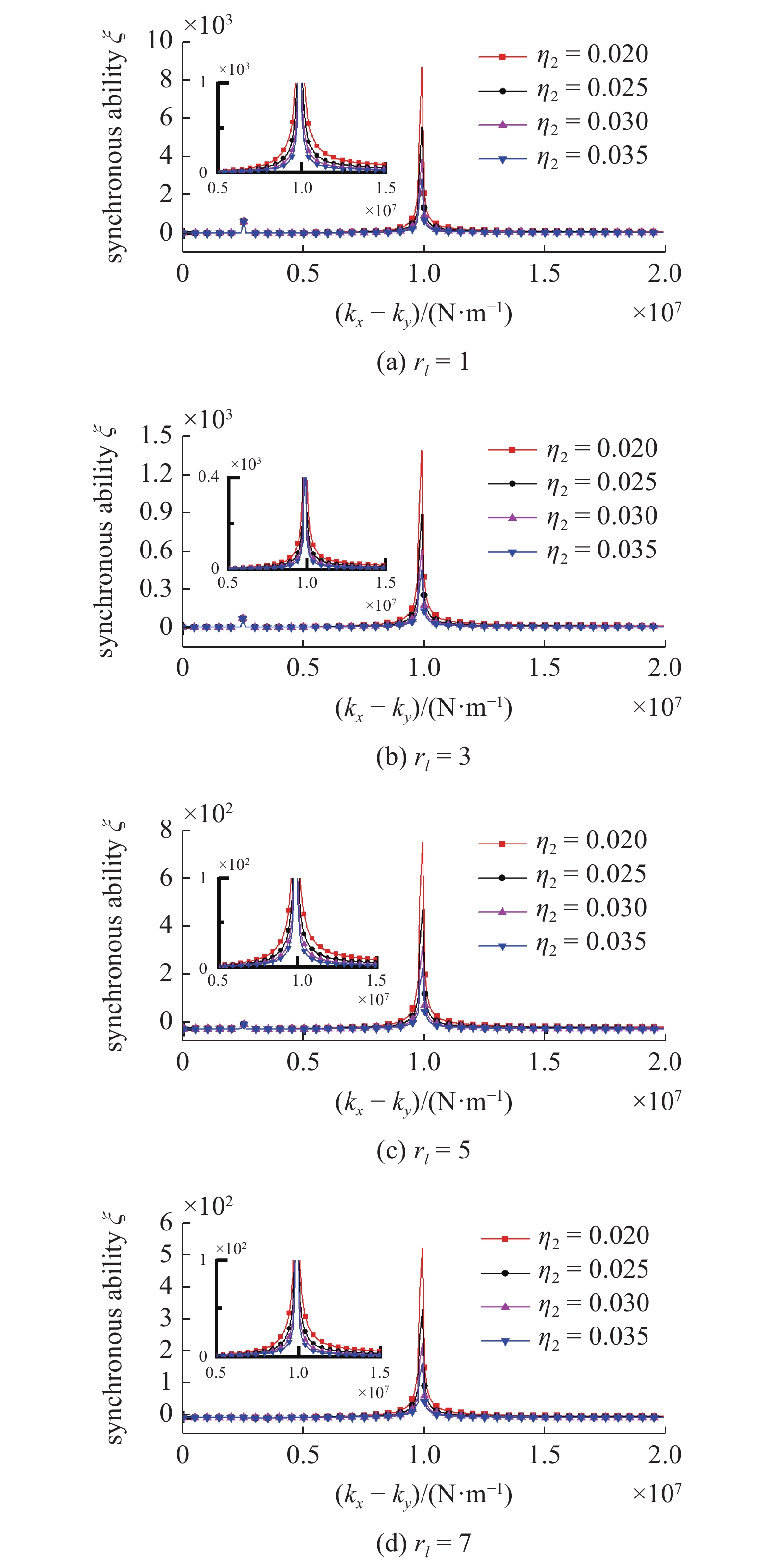
按照式(30), 已利用数值计算方法发现电机在箱体上倾角βi的变化不影响转子倍频同步能力, 本小节不再讨论. 给定β1 = 120°, β2 = 60°, 图4揭示了振动系统在不同转子的偏心质量和偏心半径下, 振动电机的安装距离对倍频转子同步能力指数的变化规律. 可以看出, 随着低频转子质量参数η2的增大, 系统同步指数将会逐渐减小. 意味着增加低频转子的偏心质量有利于提高振动系统的有效激振力, 两电机通过箱体的弹性振动和能量传递使得转子间的耦合量增加, 从而提高系统的同步能力. 同时, 以rl = 1附近为界线, 左边部分的同步指数对rl变化的敏感性程度明显大于右边, 原因在于缩短电机旋转中心至箱体质心的距离容易造成电机间用于平衡自身电磁转矩达到同步状态的可调节量不足. 当rl > 1时, ξ的变化幅度趋于平缓, 并最终以很小的斜率无限接近于零值附近, 表明箱体获得倍频同步振动的可行性也越来越高, 该结果符合3.1节的倍频同步范围分析. 对比图4(a)~4(d), 显示转子的偏心半径参数ro不影响系统同步指数的整体变化趋势, 只改变ξ在相应的ro和rl取值下的值域. 另一方面, 若β2 = 60°, ro = 0.16时, 对于电机距离参数rl分别取1, 3, 5, 7, 质量参数η2分别为0.02, 0.025, 0.03, 0.035时, 不同支撑弹簧刚度值对系统倍频同步能力的影响如图5所示. 可见, 由于振动系统具有两个不同的激励频率, 导致图中共出现两个共振区域, 分别位于2.46 × 106 N/m和9.86 × 106 N/m附近. 此时, 系统各自由度的固有频率和系统的外界激励频率接近, 即系统处于近共振状态, 频率比λx = λy = λψ = 1, 无法出现激振器稳定的倍频同步状态和箱体的周期性振动.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
当β1 = 120°, β2 = 60°时的倍频同步能力
Figure
4.
Double-frequency synchronization capacity with β1 = 120°, β2 = 60°
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
当β2 = 60°, ro = 0.16时的倍频同步能力
Figure
5.
Double-frequency synchronization capacity with β2 = 60°, ro = 0.16
下载: 全尺寸图片
幻灯片
3.3
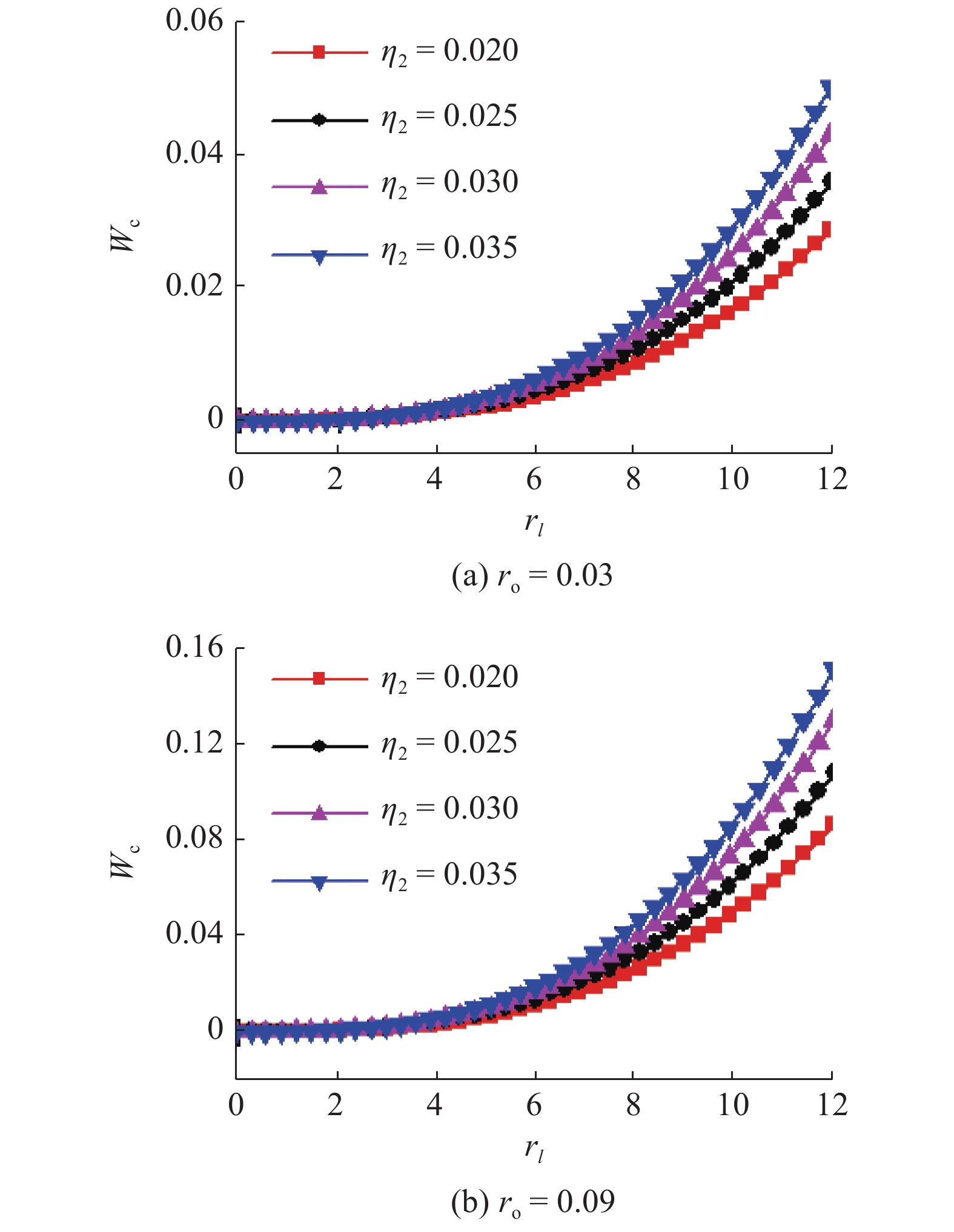
倍频同步转矩分析
根据振动系统的转矩差分方程(25)第2式和式(27), 高频电机与低频电机通过箱体的弹性耦合以及动能、势能与电能等能量之间的相互转化, 使得偏心块以各自额定转速同步驱动的同时, 其电机轴上的电磁转矩可以达到动态平衡. 因此, 振动系统的倍频同步行为问题可以转换为对电机转矩与结构参数的关系研究. 根据倍频同步准则(29)与同步稳定判别式(33), 倍频同步转矩参数Tsyn由常数

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-6-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-6-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure6-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
当β1 = 120°, β2 = 60°时的倍频同步转矩
Figure
6.
Double-frequency synchronization torque with β2 = 60°, ro = 0.16
下载: 全尺寸图片
幻灯片
3.4
双转子倍频同步状态分析
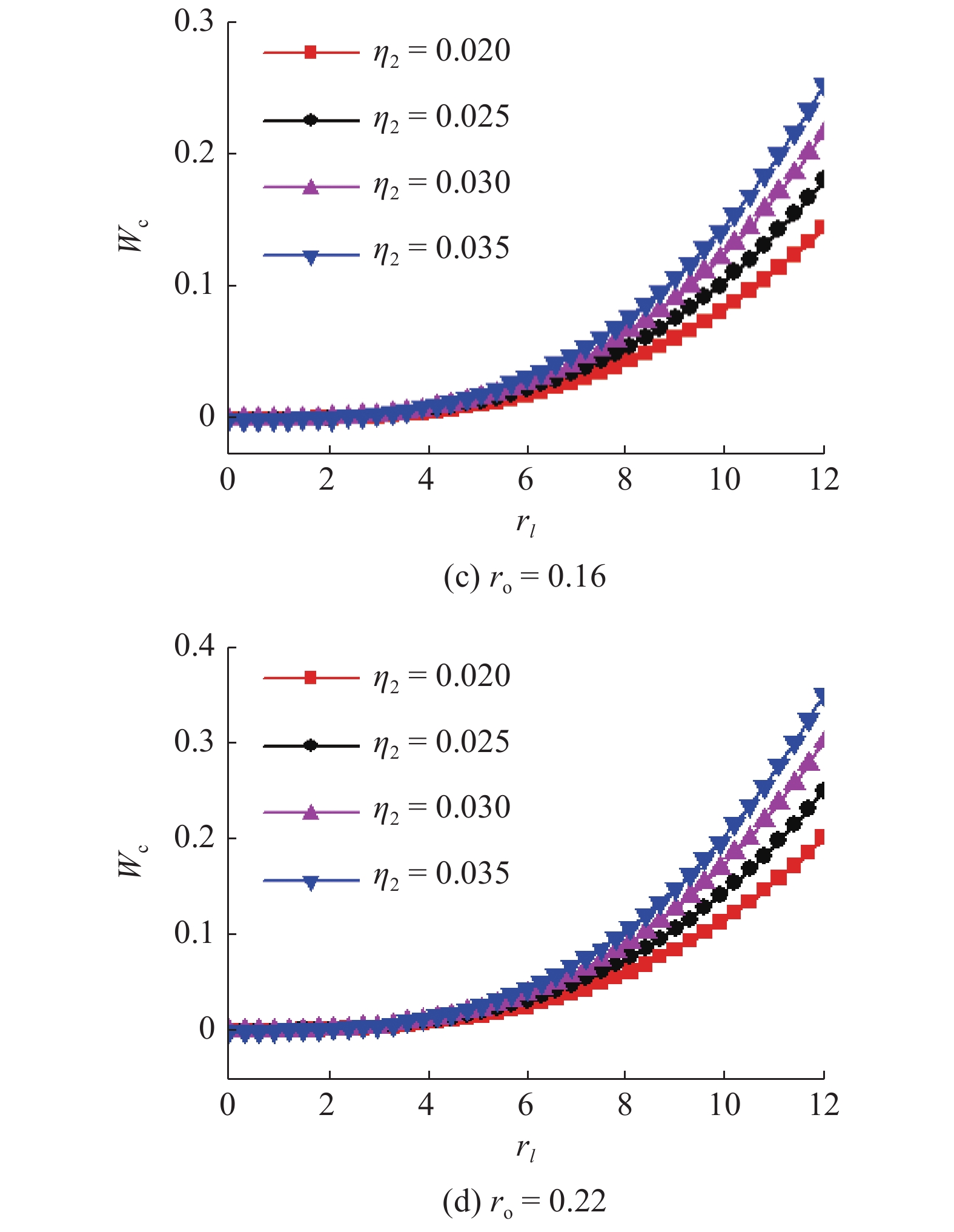
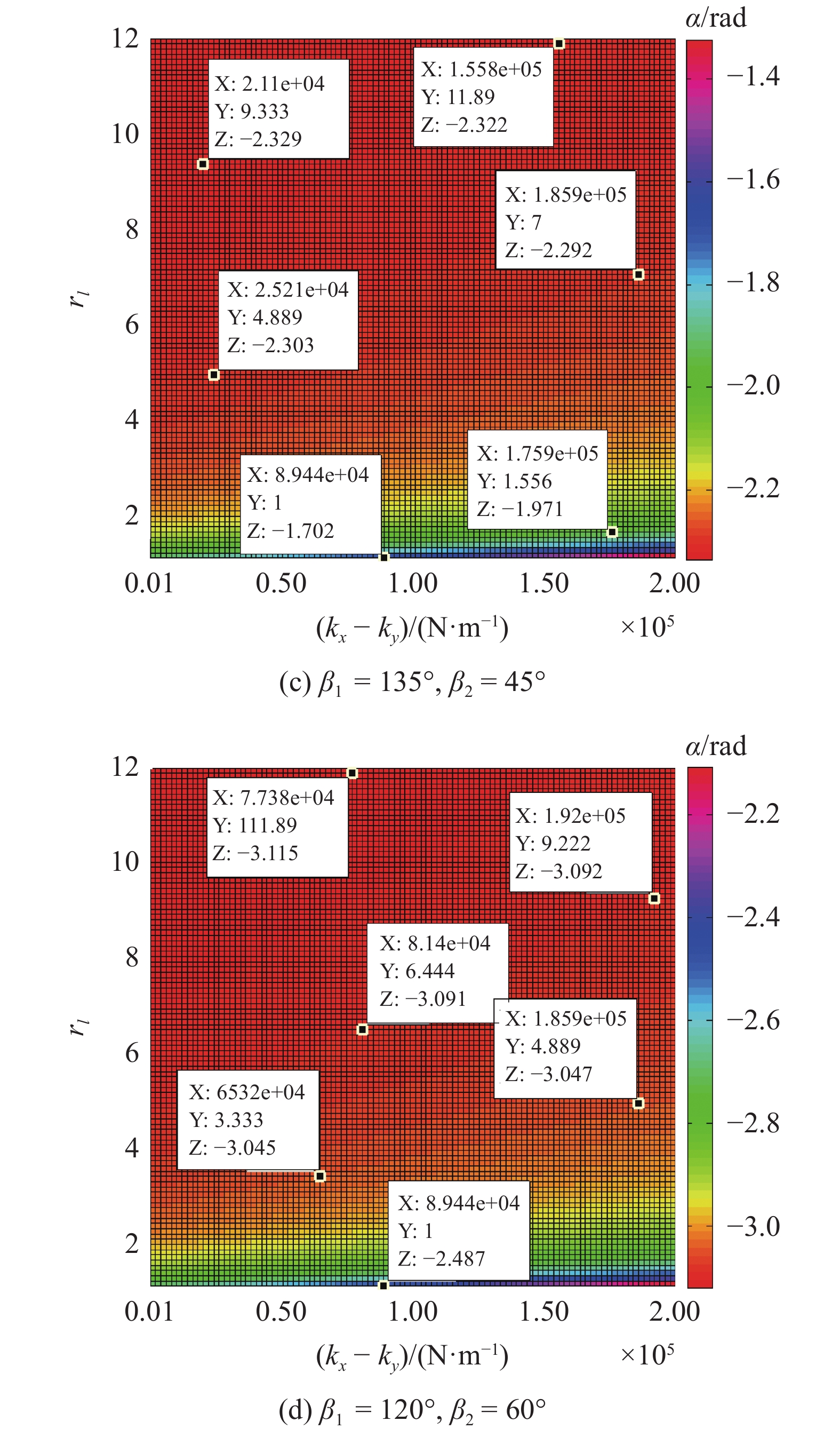
双转子倍频同步运动状态是由高低频振动电机以及刚性箱体之间的耦合振动效应形成的, 其值的稳定性决定了振动系统沿各自由度的位移响应和动力学特性, 是评估系统同步振动的最重要数字特征. 考虑不同的电机倾斜角βi, 根据上述倍频激励双转子同步理论推导, 电机位置结构参数rl、支撑弹簧刚度值kx和ky以及双转子相位差近似稳态值α之间的关系如图7所示, 数值计算的正确性将在接下来的模拟仿真和实验研究中得到验证. 关于机械系统振动类型可分为: 系统1/λc < 0.9时是亚共振系统; 0.9 ≤ 1/λc ≤ 1.1是近共振系统; 1.1 ≤ 1/λc ≤ 3是远共振系统; 1/λc > 3是超远共振系统[22]. 本文考虑系统的kx = ky, kψ可由kx和ky换算得到, kx和ky的取值范围为1 × 103 N/m < kx = ky < 2 × 105 N/m, 即频率比1/λx = 1/λy = 1/λψ > 3.5, 研究对象确定为超远共振系统. 由图7可知, 当β1 = 150°, β2 = 30°时, 随着安装距离rl的增加, 实现倍频振动的稳定同步状态值α在刚度系数不变的情况下逐渐减小并最终趋于?1.55 rad附近. 同时, 考虑rl为一常数, 可见x和y方向弹簧刚度系数的增加几乎不影响两振动电机的稳态相位差值的变化情况. 若改变两振动电机的倾斜角度, 即增加各电机的βi值, 图7(b)的同步状态变化规律类似于图7(a), 但明显两倍频激励的转子相位差的值域发生变化, 此时系统同步状态趋近于?1.96 rad附近. 另外图7(c)和7(d)显示转子在不同的电机倾斜角βi下, 其稳定同步状态值分别锁定在?2.32 rad和?3.12 rad附近. 根据研究结果表明电机斜倾角βi的取值虽然不对振动系统的同步范围、同步能力以及同步转矩值产生影响, 但是对倍频转子的同步行为具有一定的耦合作用. 系统的激振力与同步运动特性依赖于不同相位差值所反映出的动力学特性, 在工程中合理设计振动电机的安装位置可以实现稳定的振动筛分.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-7-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-7-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure7-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
倍频激励双转子相位差近似稳态值
Figure
7.
Double-frequency phase difference between the two rotors in steady state
下载: 全尺寸图片
幻灯片
4.
计算机模拟与分析
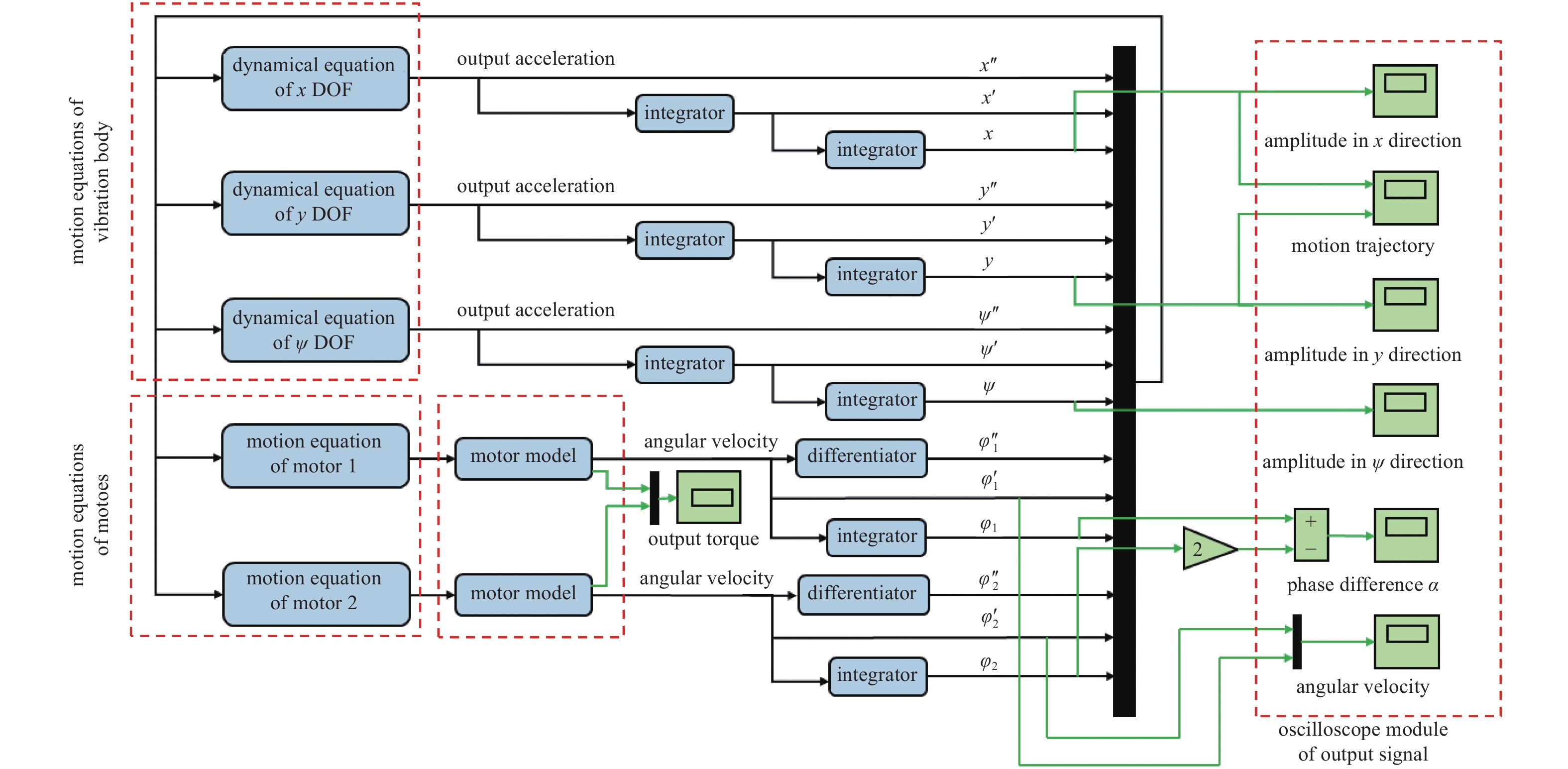
为进一步论证倍频激励双转子振动同步理论分析的有效性, 明确两电机在倍频激振源的驱动下各转子与箱体的机电耦合动态特性, 掌握系统倍频振动同步机理, 本节根据多自由度运动微分方程(8)建立了系统的机电耦合动力学仿真模型, 如图8所示. 采用Runge?Kutta算法可求解转子与箱体在超远共振系统中的动态模拟结果. 求解原理如下: 图中x, y, ψ方向的动力学方程模块依次表示箱体质心沿水平方向、竖直方向以及摆动方向上, 以加速度c″ (c = x, y, ψ)作为输出信号的运动微分方程. 同时, 利用积分器分别对其进行一次与二次积分运算, 获取箱体沿c自由度瞬时速度c′ 和瞬时位移c. 在高频振动电机1与低频振动电机2的运动方程中, 分别以各自电磁转矩Mei?Rei作为电机i仿真模型的输入信号, 进而输出转子i的角速度信号



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-8.jpg'" class="figure_img
figure_type2 ccc " id="Figure8" />
图
8
倍频激励双转子振动系统机电耦合动力学仿真模型
Figure
8.
Electromechanical coupling dynamics simulation model of dual-rotor vibration system excited by double-frequency
下载: 全尺寸图片
幻灯片
4.1
β1 = 150°, β2 = 30°, rl = 1.2时的倍频同步特性
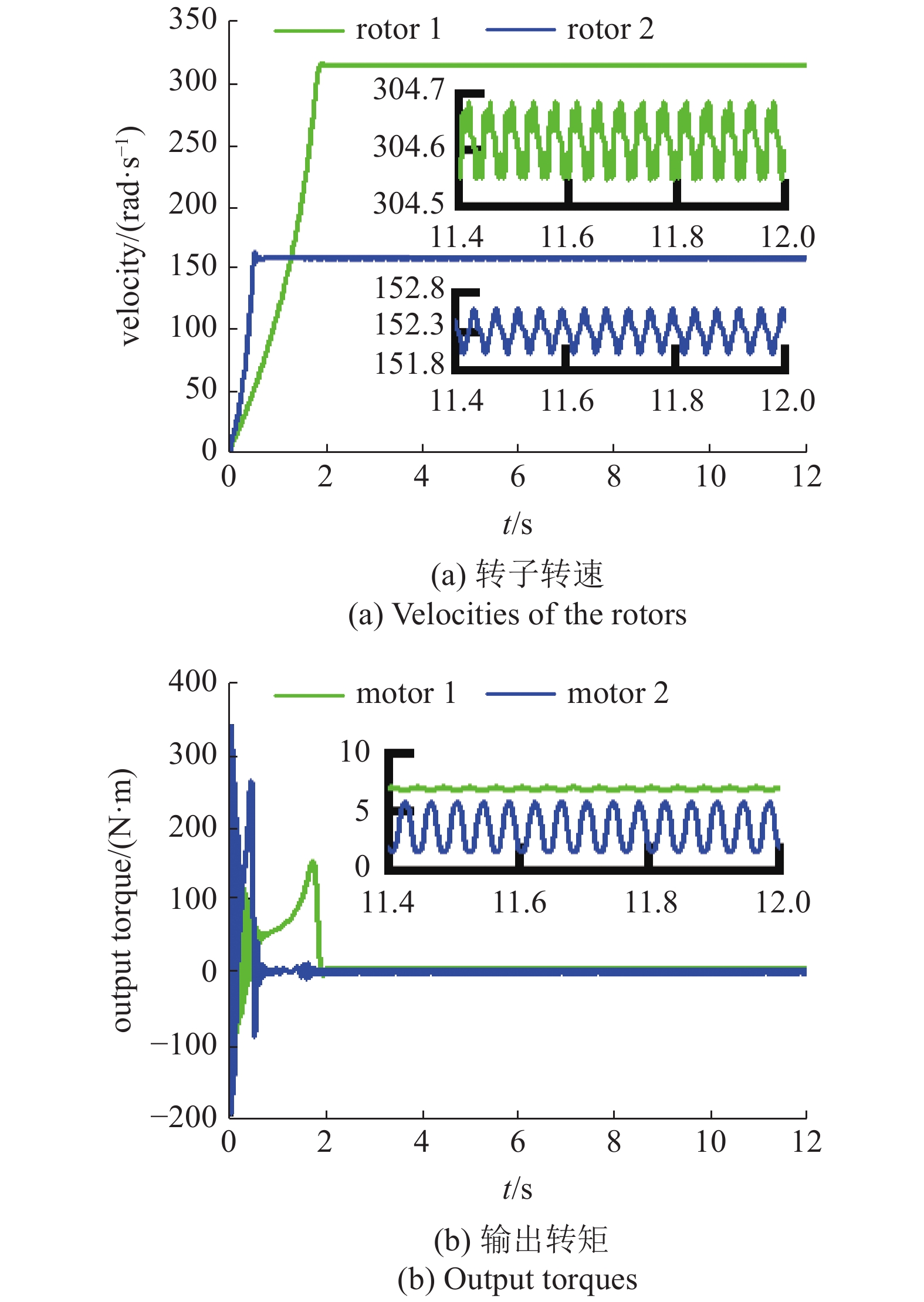
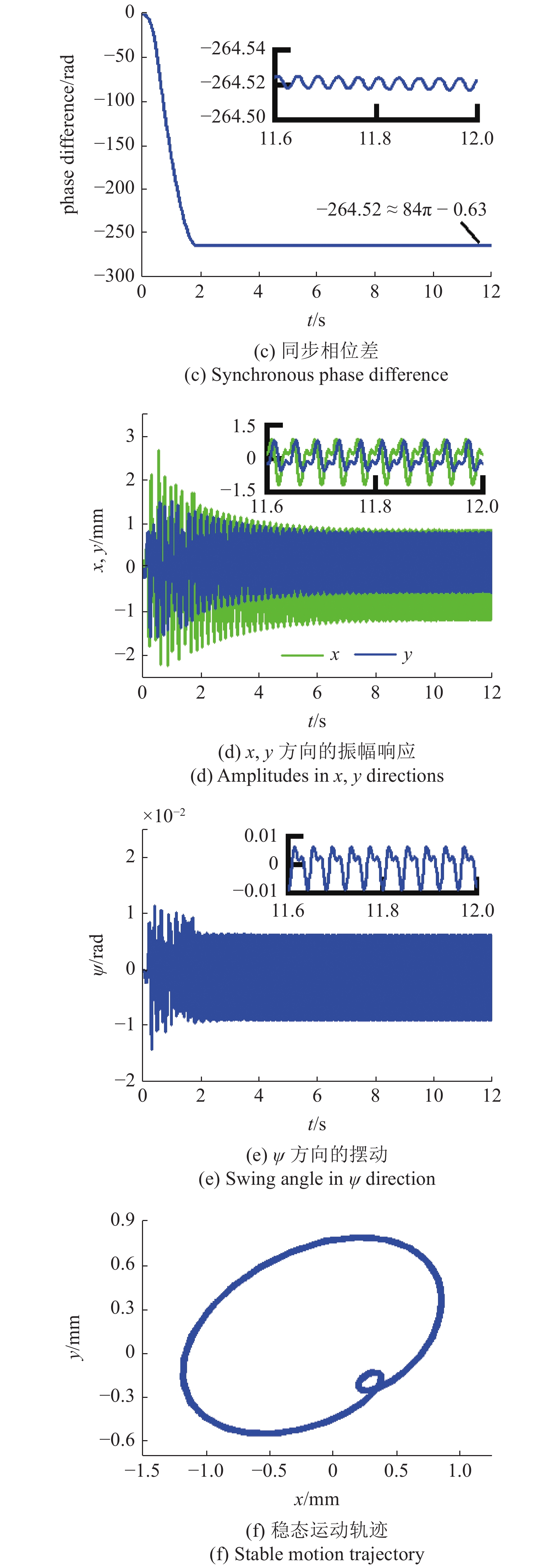
考虑结构参数kx = ky = 89586 N/m, kψ = 13560 N·m/rad (λx = λy = λy = 0.2), m2 = 3 kg (η2 = 0.03, η12 = 0.67), l = 0.36 m (rl = 1.2), 系统倍频同步特性模拟结果如图9所示. 经过计算验证, 此组结构参数符合同步准则和稳定判别式. 如图9(a)所示, 同时对高频振动电机和低频振动电机提供相同动力源, 驱动各转子作同向回转运动. 由于两电机内部性能参数存在一定的差异, 转子1到达额定转速所消耗的时间相对转子2较长, 导致两电机在初始阶段无法以相同转速同步启动, 并且转子1的加速度略小于转子2. 可见低频电机率先以152.3 rad/s到达同步转速状态, 大约运行2 s后, 高频电机的稳态同步转速为304.6 rad/s, 此时系统逐渐获得周期性振动. 将各转子的速度波动范围与振动电机的实际运行速度相比较, 前者远远小于后者, 证明理论分析中将扰动参数看作慢变参量并考虑扰动参数矩阵

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-9-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-9-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure9-1" />
9
β1 = 150°, β2 = 30°, rl = 1.2时的仿真结果
9.
Simulation result when β1 = 150°, β2 = 30° and rl = 1.2
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
β1 = 150°, β2 = 30°, rl = 1.2时的仿真结果(续)
Figure
9.
Simulation result when β1 = 150°, β2 = 30° and rl = 1.2 (continued)
下载: 全尺寸图片
幻灯片
4.2
β1 = 142°, β2 = 38°, rl = 1时的倍频同步特性
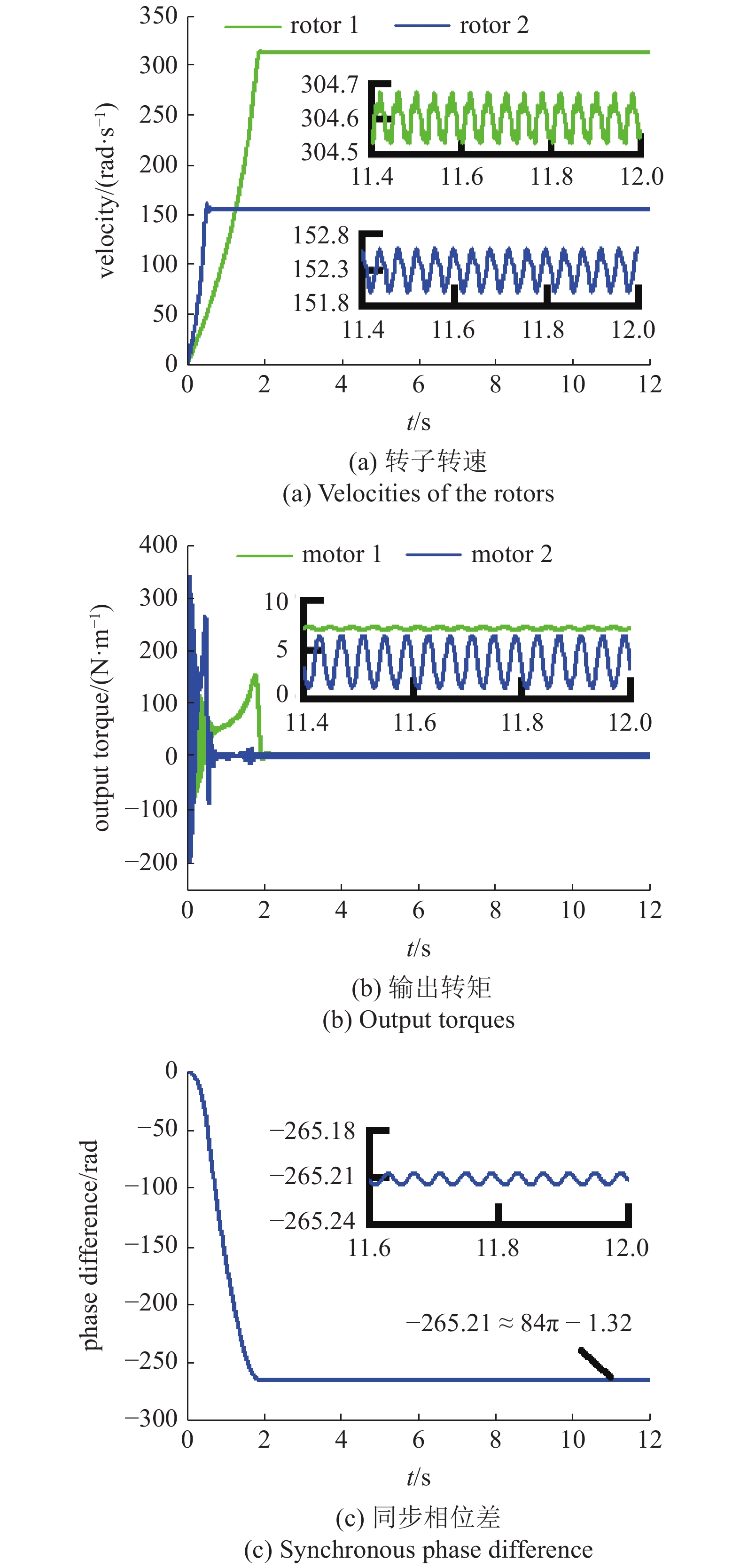
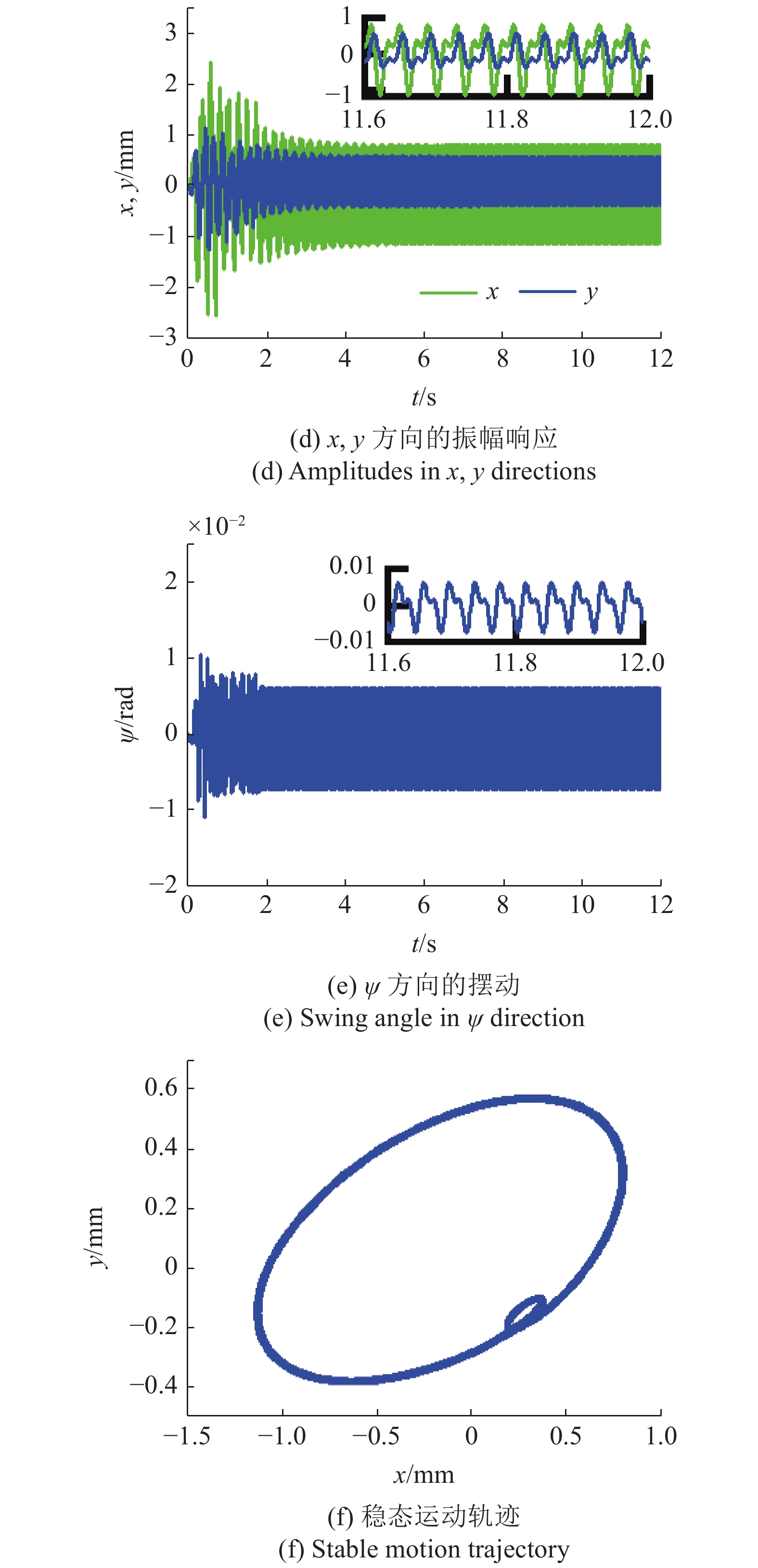
改变电机位置参数并考虑kx = ky = 89586 N/m, kψ = 13560 N·m/rad (λx = λy = λy = 0.2), m2 = 3 kg (η2 = 0.03, η12 = 0.67), l = 0.31 m (rl = 1), 其他系统参数见数值计算部分, 进一步论证机械模型的准确性, 其倍频同步特性模拟结果如图10所示. 将结构参数代入振动系统两个必要条件中进行理论计算, 结果符合关于稳定相位差值的验证标准. 在零时刻同时对高频电机和低频电机提供激振源, 从图10(a)可知转子1的转速上升趋势明显慢于转子2, 这是因为系统所采用的振动电机为一个二极异步电机和一个四极异步电机, 各电机的电气参数存在差异性, 导致转子在到达额定角速度过程中所需的角加速度值不一样. 运行2 s之后两转子逐渐趋于稳态, 其同步转速分别维持在304.6 rad/s和152.3 rad/s. 同时可以看出, 两振动电机在稳态时的速度波动最大值仅为0.3 rad/s, 远小于振动电机的激励频率. 另外, 图10(b)显示为振动电机的输出电磁转矩. 初始时刻由于箱体质量和支撑弹簧的刚度值均较大, 造成箱体无法马上激起振动响应. 随着运行时间增长, 两电机的输出扭矩增大, 并经过共振区后逐渐稳定在7 N·m和4 N·m. 系统处于稳定的倍频同步运动状态, 图10(c)反应转子1与转子2间的相位差α稳定在?1.32 rad (?265.21 ≈ ?84π?1.32). 与图7(b)的理论值相比, 计算结果在允许的误差范围内是吻合的. 此外, 图2-图10(e)揭示了箱体在双频激励下可获得稳定的周期性振动, 各自由度的幅值分别确定为1.1 mm, 0.6 mm与0.008 rad. 最后结合箱体质心沿x和y方向的稳态响应可以得到如图10(f)所示的内“8”型稳态运动轨迹.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-10-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-10-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure10-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
β1 = 142°, β2 = 38°, rl = 1时的仿真结果
Figure
10.
Simulation result when β1 = 150°, β2 = 30° and rl = 1
下载: 全尺寸图片
幻灯片
5.
实验验证
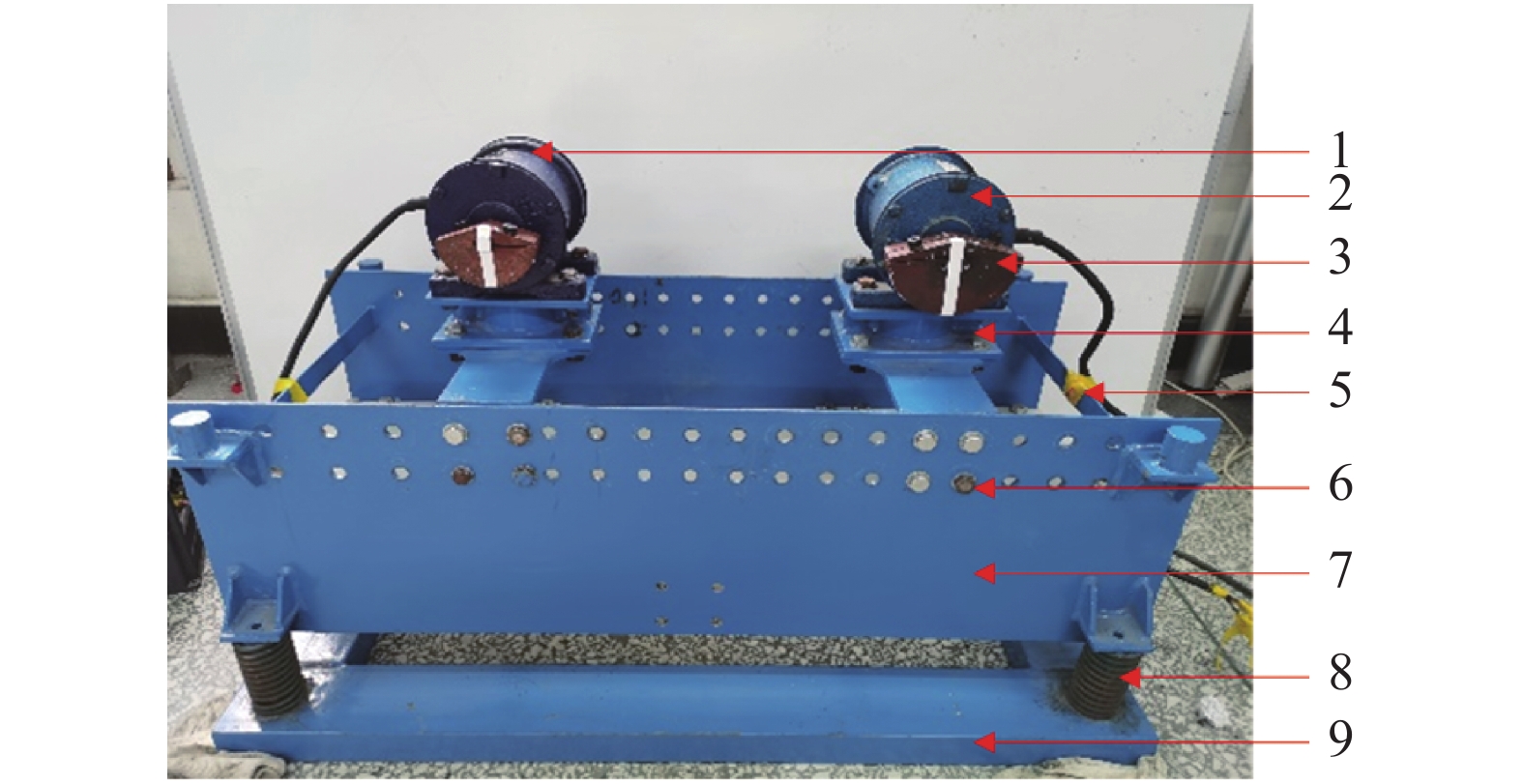
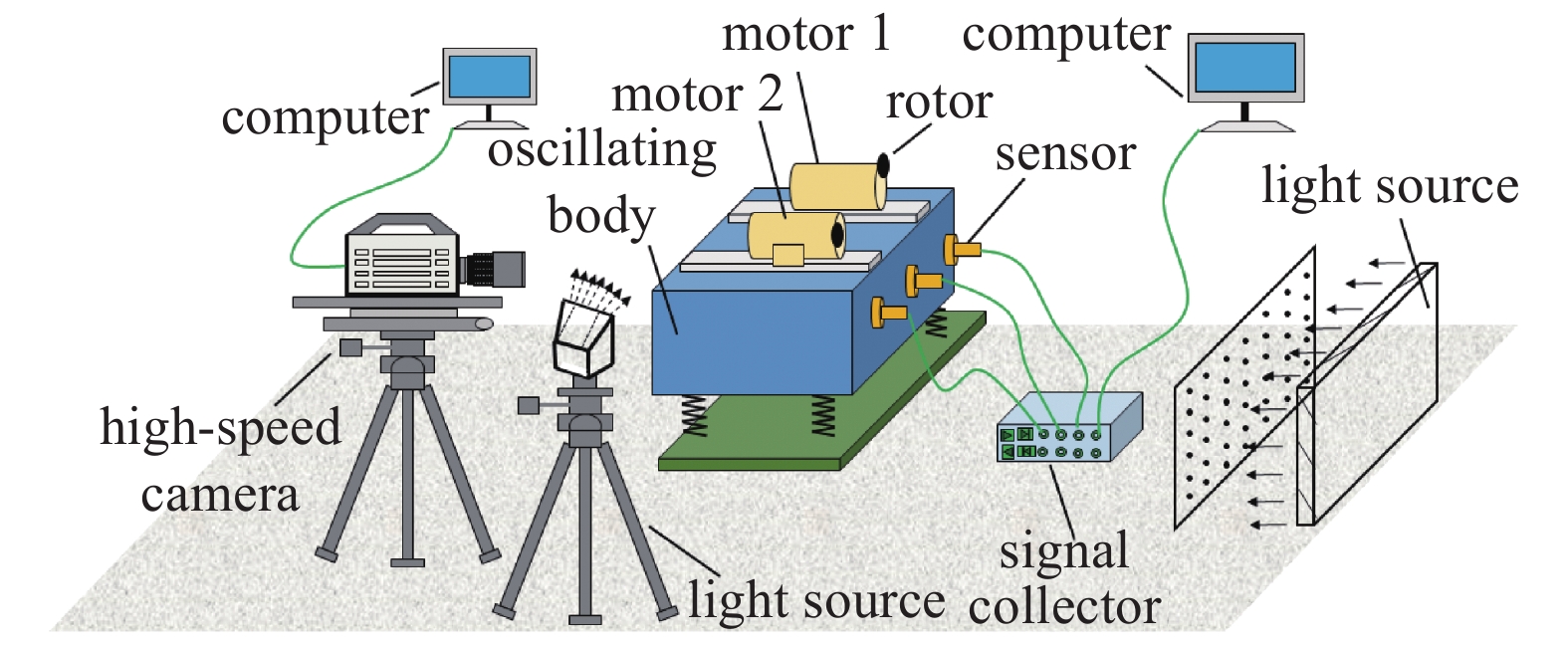
前文已对倍频同步系统的理论推导、数值计算和计算仿真进行详细的研究, 但是研究成果能否应用于振动筛分工程中有待进一步证明. 因此设计倍频激励双转子振动系统试验样机如图11所示. 电机启动时, 机械装置在电机激励偏心块的离心力作用下产生激振力, 其中电机技术参数如表1所示. 箱体在弹簧能量吸收和能量释放过程中发生位移振动和旋转摆动. 随着两电机的回转速度比值逐渐以稳定的两倍关系驱动偏心块, 基于箱体与电机间的弹性耦合效应, 两偏心块将会以恒定相位差值做倍频同步运动, 此时箱体在各方向上做周期性振动. 根据实验样机制定倍频同步实验测试方案, 如图12所示. 实验平台包括同步测试系统、实验样机和动态测试系统. 首先, 在动态测试过程中, 测试点的振动信号由一系列加速度传感器及时采集. 然后通过信号放大器和数据处理系统进行分析得到信号的动态特性. 其次, 在同步测试过程中, 通过高速成像系统准确捕捉高频转子与低频转子在瞬时状态下的相位差, 可以直观地实现稳定同步运动的定量分析. 最后将实验图像传输到计算机进行存储和处理.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
试验样机: 1 二极振动电机; 2 四极振动电机; 3 偏心块; 4 电机座; 5 钢架; 6 锁紧螺栓; 7 箱体; 8 支撑弹簧; 9 基座
Figure
11.
Experimental prototype: 1 two-pole motor; 2 four-pole motor; 3 eccentric block; 4 motor base; 5 steel frame.; 6 locking bolt; 7 oscillating body; 8 supporting spring; 9 foundation support
下载: 全尺寸图片
幻灯片
表
1
激振电机的技术参数
Table
1.
Technical parameters of the exciting motors
table_type1 ">
| Parameters | Motor 1 | Motor 2 |
| model number | YZS-1.5-2 | YZS-1.5-4 |
| rated voltage/V | 380 | 380 |
| rated power/kW | 0.12 | 0.12 |
| exciting force/kN | 1.5 | 1.5 |
| velocity/(r·min?1) | 2860 | 1430 |
| pole pairs | 1 | 2 |
| rated frequency/Hz | 50 | 50 |
| rated current/A | 0.36 | 0.4 |
下载: 导出CSV
|显示表格
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
倍频同步振动系统的实验测试方案
Figure
12.
Experimental testing scheme of double-frequency synchronization vibration system
下载: 全尺寸图片
幻灯片
5.1
参数β1 = 150°, β2 = 30°, rl = 1.2的实验结果
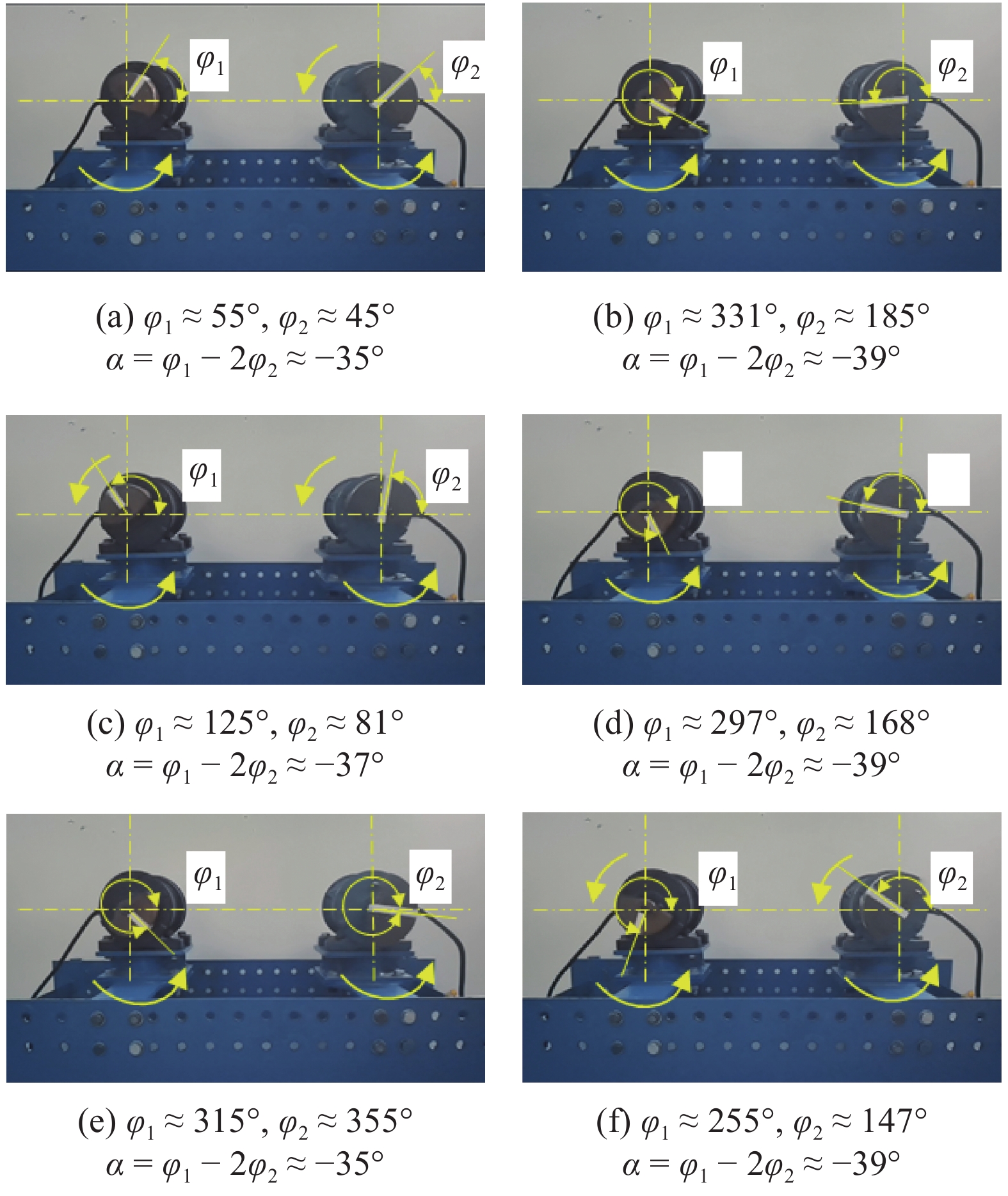
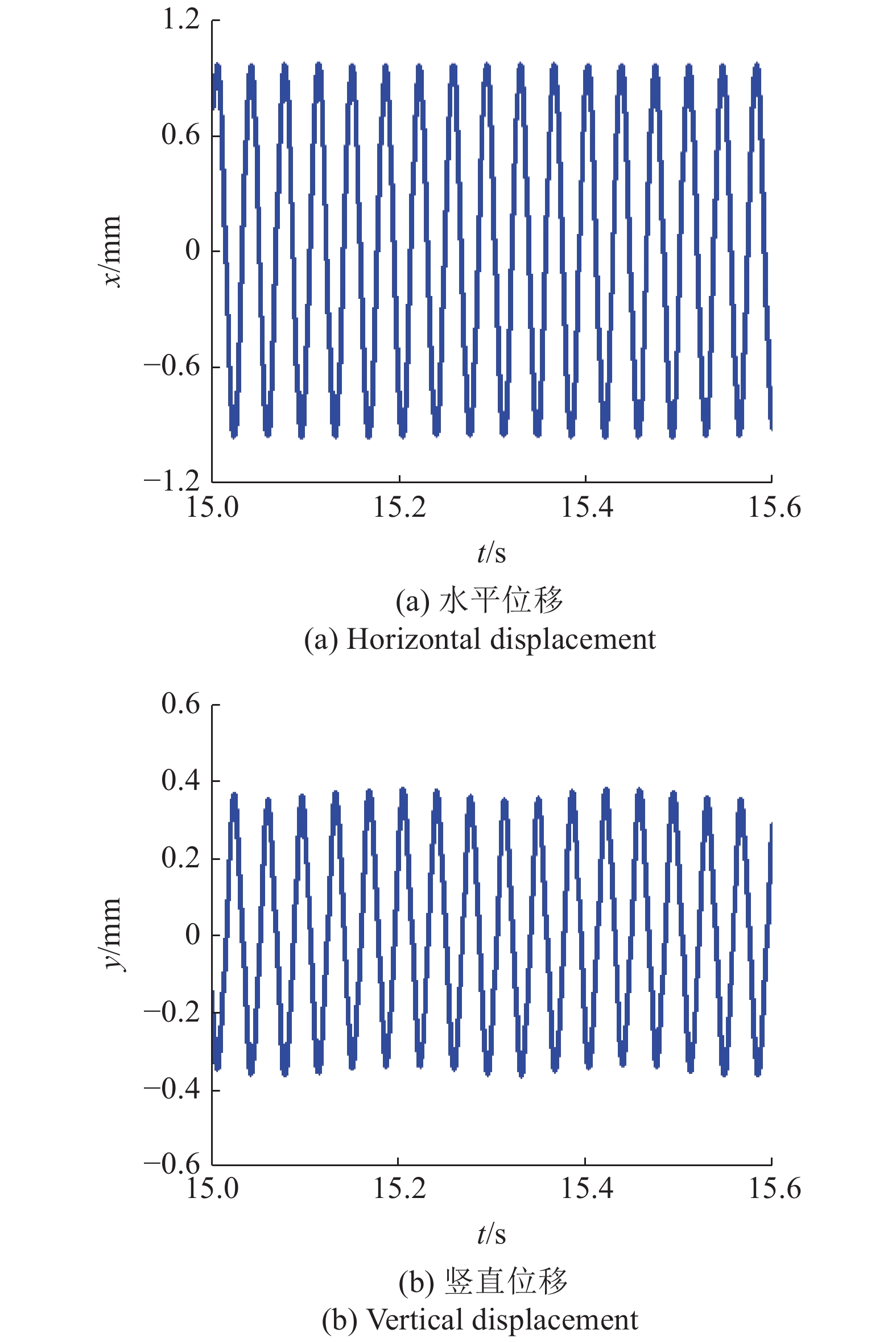
根据图12的实验测试方案, 得到参数β1 = 150°, β2 = 30°, rl = 1.2时的倍频激励双转子振动系统动力学响应和同步运动状态, 如图13和图14所示. 此组结构参数下, 系统动力学响应根据两种不同激励频率叠加所产生的波形可视为近似稳定的周期振动. 箱体沿水平方向的位移单幅值稳定在1.1 mm; 同时振动系统的沿竖直方向位移响应测得0.65 mm. 为实现同向回转双转子倍频同步振动, 箱体不仅必须具有稳定的幅值响应, 还需要两激振电机获得同步运动, 这依赖于偏心转子相位差的稳定性. 如图14所示, 利用高速成像系统精确记录不同瞬时状态的偏心转子位置. 实验测试结果分析表明倍频同步相位差α基本稳定在?39° ~ ?35°(即?0.68 ~ ?0.61 rad), 波动范围很小. 与数值分析和计算机模拟结果对比如表2所示, 确定该工况下的同步状态实验最大误差为9%, 符合振动筛分工程的误差允许范围. 整个机电耦合系统的动能, 势能和电能在同步运行过程中可以产生稳定的动态平衡, 所提出的机械模型能够成功实现倍频同步运动.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
β1 = 150°, β2 = 30°, rl = 1.2的位移响应
Figure
13.
Displacement responses with β1 = 150°, β2 = 30°, rl = 1.2
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-14.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-14.jpg'" class="figure_img
figure_type1 bbb " id="Figure14" />
图
14
β1 = 150°, β2 = 30°, rl = 1.2的同步运动状态: (a) ~ (f) 分别为转子瞬时相位差
Figure
14.
Synchronous motion state with β1 = 150°, β2 = 30°, rl = 1.2: (a) ~ (f) the instantaneous phase differences between rotors
下载: 全尺寸图片
幻灯片
表
2
动力学响应的理论、仿真和实验对比结果
Table
2.
Comparison results among the theories, simulations and experiments of the dynamic responses
table_type1 ">
| α /rad | x /mm | y /mm | |
| theoretical value | ?0.67 | —— | —— |
| simulation value | ?0.63 | 1.2 | 0.72 |
| experimental value | ?0.61 | 1.1 | 0.65 |
| error/% | 9 | 8.3 | 9.7 |
下载: 导出CSV
|显示表格
5.2
参数β1 = 142°, β2 = 38°, rl = 1的实验结果
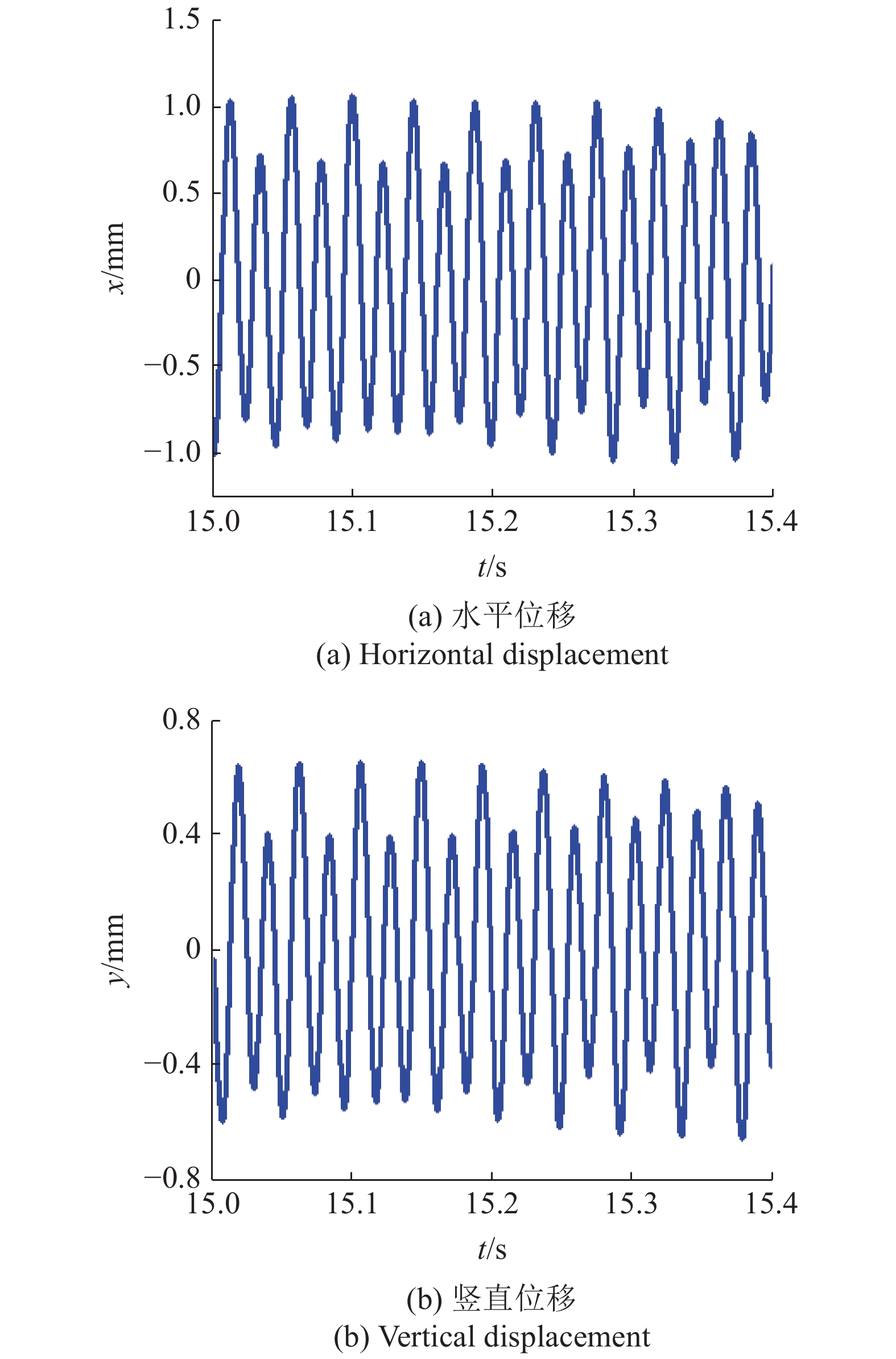
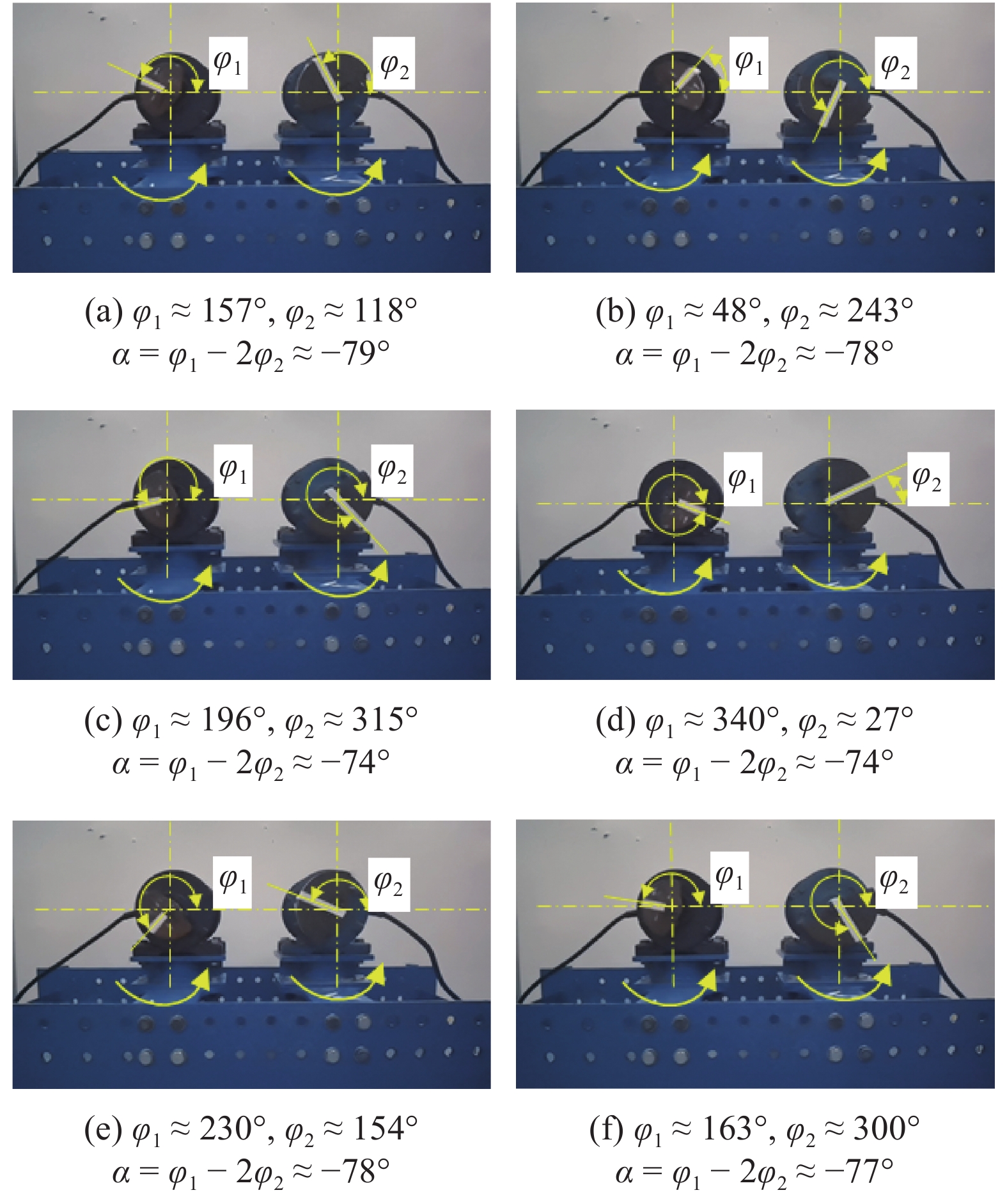
结合实验平台和理论推导, 重新考虑电机安装位置参数β1 = 142°, β2 = 38°, rl = 1, 再次研究了实验系统的机电耦合稳态同步行为, 如图15和图16所示. 运用加速度传感器测得实验测试点沿水平方向的加速度响应, 并在振动分析仪中将加速度值对时间二次积分得到测点的位移振幅为1 mm. 同理, 对振动系统的竖直方向位移响应测得0.4 mm. 此外, 系统6个不同瞬态的偏心转子位置被高速摄像机准确捕捉. 经过对倍频同步状态的分析与计算, 得出不同瞬态的转子相位差值α ≈ ?79° ~ ?74°(即?1.38 ~ ?1.3 rad). 理论、仿真和实验对比结果如表3所示. 无论是箱体的动力学响应还是转子间的同步状态, 实验测试结果与理论推导, 计算机仿真结果基本一致, 并且同步状态的绝对误差为3.3%, 进一步论证了倍频激励双转子振动系统的可行性和正确性. 造成波动误差的原因归纳为: 从振动质体的角度出发, 机械装置施加在电机轴上的负载具有可变性和非均匀性, 这是由于激振电机与箱体之间的耦合作用以及振动系统质量分布的不均匀造成的; 从激振器的角度出发, 实验测试环境的温度和湿度变化对感应电机的各项电气参数会有一定的影响, 比如电机内部转子和定子的电感系数, 阻抗系数, 互感系数等.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-15.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-15.jpg'" class="figure_img
figure_type1 bbb " id="Figure15" />
图
15
β1 = 142°, β2 = 38°, rl = 1的位移响应
Figure
15.
Displacement responses with β1 = 142°, β2 = 38°, rl = 1
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-16.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-359-16.jpg'" class="figure_img
figure_type1 bbb " id="Figure16" />
图
16
β1 = 142°, β2 = 38°, rl = 1的同步运动状态: (a) ~ (f) 分别为转子瞬时相位差
Figure
16.
Synchronous motion state with β1 = 150°, β2 = 30°, rl = 1: (a) ~ (f) the instantaneous phase differences between rotors
下载: 全尺寸图片
幻灯片
表
3
动力学响应的理论、仿真和实验对比结果
Table
3.
Comparison results among the theories, simulations and experiments of the dynamic responses
table_type1 ">
| α /rad | x /mm | y /mm | |
| theoretical value | ?1.335 | —— | —— |
| simulation value | ?1.32 | 1 | 0.45 |
| experimental value | ?1.38 | 1.1 | 0.4 |
| error/% | 3.3 | 10 | 11.1 |
下载: 导出CSV
|显示表格
6.
结 论
本文通过以上理论推导, 数值计算, 仿真研究以及实验验证详细揭示了倍频激励双转子振动系统的自同步机理和动态特征. 重要结论概括如下:
(1)系统倍频同步条件可表征为两台激振器之间输出剩余转矩差的绝对值不能超过倍频同步转矩值, 稳定性判据可通过一个与倍频同步转矩和同步相位差有关的判别式反映;
(2)系统的倍频同步特性主要依赖于安装位置, 激振器的偏心质量, 支撑弹簧刚度值以及偏心半径等参数. 倍频同步能力随着安装距离的不断增加而逐渐接近于零值附近, 电机间用于平衡电磁转矩达到同步状态的耦合量增大, 系统获得倍频同步振动的可行性越来越高;
(3)系统的倍频稳态相位差值在单周期内随着电机位置参数的增大而逐渐趋于平缓, 直至系统同步状态不再受到安装距离变化的影响. 另外电机倾角不影响同步状态的整体变化趋势, 只改变相位差的值域, 系统同步状态在计算模拟与实验研究中得到验证;
(4)与常规同频系统不同, 倍频激励双转子振动系统稳态质心运动轨迹显示为内“8”型, 为研制新型非常规轨迹的振动机械提供了较好的理论依据.
