引言
近年来, 低功耗电子设备和无线传感器网络在民用和军事领域得到了广泛的应用[1-2]. 然而, 这些设备大多依靠电池作为电源, 到目前为止, 化学电池仍有许多问题待解决, 例如寿命短、体积大、对环境污染严重. 此外, 更换电池或为电池充电非常麻烦, 有时甚至不切实际, 例如人体内部的传感器[3-4]. 因此, 为了避免更换电池, 延长设备使用寿命, 用于自供电的能量采集技术得到广泛应用.
目前, 机械振动[5]由于不易受自然环境影响, 且储量丰富, 是当前最具吸引力的能源选择. 根据转换方法的不同, 机械能转化为电能的方法可分为压电[6]、电磁[7]和静电[8]转换. 压电能量采集技术因其强大的机电耦合效应、能量转换效率高和结构简单等优点, 成为最具有潜力的电池替代品. 因此, 在本研究中, 选择压电转换作为能量采集方法.
随着能量采集技术的发展, 悬臂梁结构受到普遍关注[9-12]. 与悬臂梁结构相比, 压电圆板因其轴对称结构和双向应变等优势吸引了研究者的关注[13-14]. 例如, 一些****研究了承受压力波动的压电圆板能量采集器的采集性能[15-17], 这些研究为参数优化提供了有用的设计工具. Yuan等[18]基于压电控制方程, 推导出压电鼓式换能器在弯曲模式下的解析解, 分析了换能器采集振动能量的性能. Kan等[19]利用Raleigh方法建立了不同边界的压电圆板的解析模型, 他们发现简支边界往往可以获得更高的机电耦合系数. Mohsen和Hamid[20]研究了随机激励下固支压电圆板能量采集器采集性能, 成功将功率密度提高到3.2 mW/m2.
遗憾的是, 上述文献中能量采集器的固有频率相较于低频环境来说较高, 导致了低发电效率. 为了克服这个问题, Chen等[21], Palosaari等[22]等发表了关于降低能量采集器固有频率的评论, 发现预应力对于降低固有频率和提高能量采集效率是必要的. 基于上述发现, 很多****对附加质量的圆板能量采集器进行了探究. 一些文献[23-27]借助于实验手段, 采用不同的设计来提高能量采集器的采集性能. Liu等[23-24]分别将平坦的粘合区域更改为弯曲的粘合区域, 将附加在中心的质量块更改为环形空心形状, 优化了压电圆板能量采集器的功率输出. Han等[25]发现, 有凹槽的压电圆板能量采集器相较于无凹槽的能量采集器, 输出功率明显增加. Solovyev和Duong[26]用ANSYS和ACELAN软件对压电双晶圆板能量采集器建模, 为设备的组装技术提供指导. 值得注意的是, 上述文献均是通过实验或仿真完成, 不能反映结构参数与能量采集器采集性能的关系. 因此, 封闭形式的解析解是描述和优化能量采集器的必要工具. Jiang和Hu[27]使用压电控制方程推导出中心带有刚性质量块的双晶压电圆板能量采集器的解析解, 结果表明调整参数可以提高能量采集器的采集性能. Yang等[28-29]基于板振动理论研究了附加质量的压电圆板的弯曲振动, 并通过仿真和实验进行验证.
影响压电圆板能量采集器的采集性能的参数有很多, 包括基板厚度、半径、质量块重量、压电片外径等. 然而关于压电片内径对能量采集器的采集性能的影响还鲜有报道. Xu等[30]通过实验发现了压电圆板能量采集器中的非均匀应变分布会降低输出功率. 因此, 他们减小压电片尺寸并在中心挖孔, 研究发现去除压电片的低电压输出部分能够提高采集效率. 与上述文献不同的是, 本文使用能量法和有限元仿真来研究考虑附加质量接触面积的压电圆板能量采集器的采集性能, 并探究了压电片内径对能量采集器采集性能的影响.
本文采用广义哈密顿原理, 推导出附加质量的压电圆板能量采集器的机电耦合方程, 用伽辽金法对方程近似离散, 通过离散方程得到输出电压、功率的闭合解. 最后基于闭合解探讨了负载阻抗、附加质量块、压电板的内、外径对压电能量采集器采集性能的影响, 并用有限元仿真对结果进行验证. 以期为工程对象提供参考数据.
1.
压电圆板能量采集器的理论模型
1.1
压电圆板能量采集器机电耦合方程
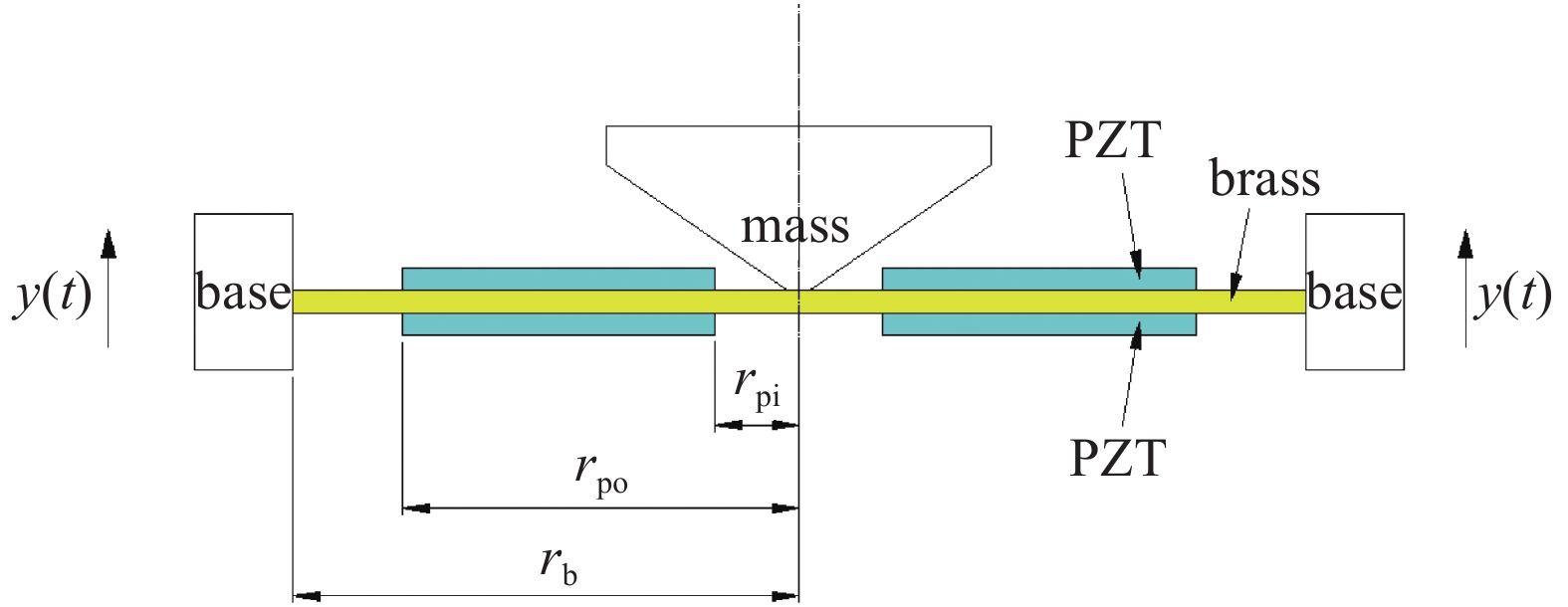
由质量块和压电复合板组成的能量采集器的剖视结构如图1所示. 复合板由两个串联的压电陶瓷片铺设在基板上组成, 其中基层的半径和厚度分别为rb和hb, 压电片内、外半径和厚度分别为rpi,rpo和hp. 压电复合板中心固定一个倒锥形质量块, 质量块尖端半径rm远小于复合板半径, 因此在理论建模中将质量块考虑为质点. 基板被固支在振动位移为y(t)基座上.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
附加质量块的圆板能量采集器的剖面图
Figure
1.
The cutaway view of the circular energy harvester considering proof mass
 下载:
下载: 全尺寸图片
幻灯片
假设系统的挠度不足以引起非线性几何项, 考虑基础位移的位移矢量为
$$ {boldsymbol{U}} = - zfrac{{partial w}}{{partial r}}{boldsymbol{i}} + (w + y){boldsymbol{k}} $$  | (1) |
式中, i和k分别表示沿r和z轴的单位向量.
基于基尔霍夫薄板理论, 几何方程为
$$ left. begin{array}{l} {varepsilon _r} = - zdfrac{{{partial ^2}w}}{{partial {r^2}}} {varepsilon _theta } = - dfrac{z}{r}dfrac{{partial w}}{{partial r}} {varepsilon _{rtheta }} = 0 end{array} ight} $$  | (2) |
遵循胡克定律, 基板的物理方程为[20]
$$ left. begin{array}{l} sigma _r^{left( {text{b}} ight)} = dfrac{{{E_{text{b}}}}}{{1 - v_{text{b}}^2}}left( {{varepsilon _r} + {v_{text{b}}}{varepsilon _theta }} ight) sigma _theta ^{left( {text{b}} ight)} = dfrac{{{E_{text{b}}}}}{{1 - v_{text{b}}^2}}left( {{varepsilon _theta } + {v_{text{b}}}{varepsilon _r}} ight) end{array} ight} $$  | (3) |
式中, (
ight)} $

ight)} $



考虑压电材料的压电效应, 上压电陶瓷的物理方程[31]
$$ left. begin{array}{l} sigma _r^{left( {{text{p}}1} ight)} = dfrac{ {{varepsilon _r} + {v_{text{p}}}{varepsilon _theta } - (1 + {v_{text{p}}}){d_{31}}{E_3}} }{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}} sigma _theta ^{left( {{text{p}}1} ight)} = dfrac{ {{varepsilon _theta } + {v_{text{p}}}{varepsilon _r} - (1 + {v_{text{p}}}){d_{31}}{E_3}} }{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}} D_3^{left( {{text{p}}1} ight)} = {d_{31}}left(sigma _r^{left( {{text{p}}1} ight)} + sigma _theta ^{left( {{text{p}}1} ight)} ight) + varepsilon _{33}^T{E_3} end{array} ight} $$  | (4) |
式中, (
ight)} $

ight)} $

ight)} $



下压电陶瓷的物理方程
$$ left. begin{array}{l} sigma _r^{left( {{text{p}}2} ight)} = dfrac{ {{varepsilon _r} + {v_{text{p}}}{varepsilon _theta } + (1 + {v_{text{p}}}){d_{31}}{E_3}} }{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}} sigma _theta ^{left( {{text{p}}2} ight)} = dfrac{ {{varepsilon _theta } + {v_{text{p}}}{varepsilon _r} + (1 + {v_{text{p}}}){d_{31}}{E_3}} }{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}} D_3^{left( {{text{p}}2} ight)} = - {d_{31}}left(sigma _r^{left( {{text{p}}2} ight)} + sigma _theta ^{left( {{text{p}}2} ight)} ight) + varepsilon _{33}^T{E_3} end{array} ight} $$  | (5) |
式中,
ight)}
ight.$

ight)}
ight)$

ight)} $

z方向的电场强度与电压之间的关系[31]
$$ {E_3} = - frac{{v(t)}}{{2{h_{text{p}}}}} $$  | (6) |
式中, v(t)为上下压电板之间的电压.
压电圆板能量采集器的总动能表示为[32]
$$ begin{split} T =& frac{1}{2}{int_{{V^{left( {text{b}} ight)}}} {{ ho _{text{b}}}[dot w(r,t) + dot y(t)]} ^2}{text{d}}V{text{ }} + & {text{ }} frac{1}{2}{int_{{V^{left( {{text{p}}1} ight)}}} {{ ho _{text{p}}}[dot w(r,t) + dot y(t)]} ^2}{text{d}}V{text{ }}+ & {text{ }} frac{1}{2}{int_{{V^{left( {{text{p}}2} ight)}}} {{ ho _{text{p}}}[dot w(r,t) + dot y(t)]} ^2}{text{d}}V + &frac{1}{2}{m_0}{left[ {dot w(0,t) + dot y(t)} ight]^2} = & {text{ }} frac{1}{2}int_{{A_{text{b}}}} {left[ {m{text{ + }}{m_0}delta left( r ight)} ight]{{[dot w(r,t) + dot y(t)]}^2}} {text{d}}A end{split} $$  | (7) |
式中, m0是附加质量块的质量, m为压电复合板单位面积的质量, 表示为
$$ m = left{ begin{array}{l} {m_1} = { ho _{text{b}}}{h_{text{b}}},;;;;;;;;;;;;;;;;;;;;;{text{ 0}} leqslant r leqslant {r_{{text{pi}}}} {m_2} = { ho _{text{b}}}{h_{text{b}}} + 2{ ho _{text{p}}}{h_{text{p}}},;;;;;;;;;{r_{{text{pi}}}} leqslant r leqslant {r_{{text{po}}}} {m_3} = { ho _{text{b}}}{h_{text{b}}},;;;;;;;;;;;;;;;;;;;;;{text{ }}{r_{{text{po}}}} leqslant r leqslant {r_{text{b}}} end{array} ight. $$  |
式中, ρb和ρp分别表示基板和压电板的体积密度.
压电圆板能量采集器的总势能为[32]
$$ begin{split} U = &frac{1}{2}intlimits_{{V^{left( {text{b}} ight)}}} {left( {sigma _r^{left( {text{b}} ight)}{varepsilon _r} + sigma _theta ^{left( {text{b}} ight)}{varepsilon _theta }} ight)} {text{d}}V + & frac{1}{2}intlimits_{{V^{left( {{text{p}}1} ight)}}} {left( {sigma _r^{left( {{text{p}}1} ight)}{varepsilon _r} + sigma _theta ^{left( {{text{p}}1} ight)}{varepsilon _theta }} ight)} {text{d}}V + & {text{ }} frac{1}{2}intlimits_{{V^{left( {{text{p}}2} ight)}}} {left( {sigma _r^{left( {{text{p2}}} ight)}{varepsilon _r} + sigma _theta ^{left( {{text{p}}2} ight)}{varepsilon _theta }} ight)} {text{d}}V = & {text{ }} frac{1}{2}int_{{A_{text{b}}}} {{D_j}left[ {{{left( {frac{{{partial ^2}w}}{{partial {r^2}}}} ight)}^2} + frac{{2{v_j}}}{r}frac{{partial w}}{{partial r}}frac{{{partial ^2}w}}{{partial {r^2}}} + {{left( {frac{1}{r}frac{{partial w}}{{partial r}}} ight)}^2}} ight]} {text{d}}A - & {text{ }} frac{1}{2}frac{{vleft( t ight)left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}}}{{2S_{11}^{{E}}left( {1 - {v_{text{p}}}} ight)}}int_{{A_{text{b}}}} {H(r)left( {frac{{{partial ^2}w}}{{partial {r^2}}} + frac{1}{r}frac{{partial w}}{{partial r}}} ight)} {text{d}}A end{split} $$  | (8) |
式中,
ight) - Hleft( {r - {r_{{text{po}}}}}
ight) $

$$ {D_j} = left{ begin{array}{l} {D_1} = dfrac{{{E_{text{b}}}{I_{{text{b}}2}}}}{{ {1 - v_{text{b}}^2} }},{text{ 0}} leqslant r leqslant {r_{{text{pi}}}} {D_2} = dfrac{{{E_{text{b}}}{I_{{text{b}}2}}}}{{ {1 - v_{text{b}}^2} }} + dfrac{{{I_{{text{p}}2}}}}{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}},{text{ }}{r_{{text{pi}}}} leqslant r leqslant {r_{{text{po}}}}{text{ }} {D_3} = dfrac{{{E_{text{b}}}{I_{{text{b}}2}}}}{{ {1 - v_{text{b}}^2} }},{text{ }}{r_{{text{po}}}} leqslant r leqslant {r_{text{b}}}{text{ }} end{array} ight. $$  |
$$ {v_j} = left{ begin{array}{l} {v_1} = {v_{text{b}}},{text{ 0}} leqslant r leqslant {r_{{text{pi}}}} {v_2} = dfrac{{dfrac{{{E_{text{b}}}{I_{{text{b}}2}}{v_{text{b}}}}}{{ {1 - v_{text{b}}^2} }} + dfrac{{{I_{{text{p}}2}}{v_{text{p}}}}}{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}}}}{{dfrac{{{E_{text{b}}}{I_{{text{b}}2}}}}{{ {1 - v_{text{b}}^2} }} + dfrac{{{I_{{text{p}}2}}}}{{S_{11}^Eleft( {1 - v_{text{p}}^2} ight)}}}},{text{ }}{r_{{text{pi}}}} leqslant r leqslant {r_{{text{po}}}} {v_3} = {v_{text{b}}},{text{ }}{r_{{text{po}}}} leqslant r leqslant {r_{text{b}}}{text{ }} end{array} ight. $$  |
$$ begin{split} 式中,;&{I_{{text{b2}}}} = displaystyleint_{ - frac{{{h_{text{b}}}}}{2}}^{frac{{{h_{text{b}}}}}{2}} {{z^2}{text{d}}z = } dfrac{{h_{text{b}}^3}}{{12}}&{I_{{text{p}}2}} = int_{frac{{{h_{text{b}}}}}{2}}^{frac{{{h_{text{b}}}}}{2} + {h_{text{p}}}} {{z^2}{text{d}}z + int_{ - left( {frac{{{h_{text{b}}}}}{2} + {h_{text{p}}}} ight)}^{ - frac{{{h_{text{b}}}}}{2}} {{z^2}{text{d}}z} = }&qquad {frac{2}{3}left[ {{{left( {frac{{{h_{text{b}}}}}{2} + {h_{text{p}}}} ight)}^3} - {{left( {frac{{{h_{text{b}}}}}{2}} ight)}^3}} ight]} end{split} quadquadqquadqquad$$  |
串联压电陶瓷片的总电能为[32]
$$ begin{split} {W_{{text{ie}}}} =& frac{1}{2}int_{{V^{left( {{text{p}}1} ight)}}} {D_3^{left( {{text{p}}1} ight)}{E_3}} {text{d}}V + {text{ }}frac{1}{2}int_{{V^{left( {{text{p2}}} ight)}}} {D_3^{left( {{text{p2}}} ight)}{E_3}} {text{d}}V{text{ = }} & {text{ }}frac{1}{2}int_{{A_{text{b}}}} {Hleft( r ight)} Biggl{{18} {frac{{vleft( t ight)left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}}}{{2S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}left( {frac{{{partial ^2}w}}{{partial {r^2}}} + frac{1}{r}frac{{partial w}}{{partial r}}} ight) + } & left. {frac{{{v^2}(t)}}{{2{h_{text{p}}}}}left[ {varepsilon _{33}^{text{T}} - frac{{2d_{31}^2}}{{S_{11}^{text{E}}left( {1 - {v_{text{p}}}} ight)}}} ight.} ight]Biggl}{18}{text{d}}A end{split}$$  | (9) |
考虑内部电能的广义哈密顿原理为[31]
$$ int_{{t_1}}^{{t_2}} {left( {delta T - delta U + delta {W_{{text{ie}}}} + delta {W_{{text{nc}}}}} ight)} {text{d}}t = 0 $$  | (10) |
式中, δT, δU, δWie和δWnc分别为动能、势能、电能和非保守能的变分. 在本研究中, 由于在动能中考虑了基础激励的影响, 机械阻尼在后续研究中引入, 因此非保守虚功为
$$ delta {W_{{text{nc}}}} = delta {W_{{text{nce}}}} = Q(t)delta v(t) $$  | (11) |
将式(7) ~ 式(9)和式(11)代入式(10), 忽略惯性矩和面内惯性, 机电耦合方程为
$$ begin{split}& D{nabla ^4}w + left[ {m + {m_0}delta left( r ight)} ight]ddot w - & qquad frac{{{d_{31}}left( {{h_{text{p}}} + {h_{text{b}}}} ight)vleft( t ight)}}{{2S_{11}^{text{E}}left( {1 - {v_{text{p}}}} ight)}}left( {frac{{{delta _{text{F}}}}}{r} + frac{{partial {delta _{text{F}}}}}{{partial r}}} ight) = - left[ {m + {m_0}delta left( r ight)} ight]ddot y end{split} $$  | (12) |
$$ begin{split}& displaystyleint_{{A_{text{p}}}} {left. {frac{{left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}{nabla ^2}w}}{{2S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}} + } ight.} & left. {frac{{vleft( t ight)}}{{2{h_{text{p}}}}}left[ {varepsilon _{33}^T - frac{{2d_{31}^2}}{{S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}} ight.} ight]{text{d}}A + Q = 0 end{split} $$  | (13) |
式中,
ight) - delta left( {r - {r_{{text{po}}}}}
ight) $

对式(13)求关于时间的导数, 根据
ight)}}{{{R_{text{L}}}}} $

$$ int_{{A_{text{p}}}} { {frac{{left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}{nabla ^2}dot w}}{{2S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}}} {text{d}}A + {C_{text{p}}}dot vleft( t ight) + frac{{vleft( t ight)}}{{{R_{text{L}}}}} = 0 $$  | (14) |
式中, RL表示负载阻抗; 压电陶瓷的电容
$$ {C_{text{p}}} = dfrac{{{text{π}} left( {r_{{text{po}}}^2 - r_{{text{pi}}}^2} ight)vleft( t ight)}}{{2{h_{text{p}}}}}left[ {varepsilon _{33}^T - dfrac{{2d_{31}^2}}{{S_{11}^{text{E}}left( {1 - {v_{text{p}}}} ight)}}} ight]$$  |
将横向挠度假设为[33]
$$ wleft( {r,t} ight) = sumlimits_{r = 1}^N {{phi _r}left( r ight){q_r}left( t ight)} $$  | (15) |
式中,
ight) $

ight) $


ight) $
$$ {phi _r}left( r ight) = left{ begin{array}{l} {phi _{1r}}left( r ight),{text{ 0}} leqslant r leqslant {r_{{text{pi}}}} {phi _{2r}}left( r ight),{text{ }}{r_{{text{pi}}}} leqslant r leqslant {r_{{text{po}}}}{text{ }} {phi _{3r}}left( r ight),{text{ }}{r_{{text{po}}}} leqslant r leqslant {r_{text{b}}}{text{ }} end{array} ight. $$  | (16) |
将式(15)代入式(12)和式(14), 引入瑞利阻尼[31], 用伽辽金法对方程离散化得
$$ {boldsymbol{M}}ddot {boldsymbol{q}} + {boldsymbol{D}}dot {boldsymbol{q}} + {boldsymbol{Kq}} - {boldsymbol{theta}} vleft( t ight) = - pddot yleft( t ight) $$  | (17) |
$$ {{boldsymbol{eta}} ^{ m{T}}}dot {boldsymbol{q}} + {C_{text{p}}}dot vleft( t ight) + frac{1}{{{R_{text{L}}}}}vleft( t ight) = 0 $$  | (18) |
式中, M,D = μΜ+γK,K分别表示质量矩阵、阻尼矩阵和刚度矩阵, 其中μ和γ是比例系数[31]. θ和η分别代表反向耦合项和正向耦合项, 表示为
$$begin{split} {m_{ir}}{text{ = }}&intlimits_{{A_1}} {{m_1}{phi _{r1}}{phi _{i1}}{text{d}}A + } intlimits_{{A_2}} {{m_2}{phi _{r2}}{phi _{i2}}{text{d}}A + } & {intlimits_{{A_3}} {{m_3}{phi _{r3}}{phi _{i3}}{text{d}}A} + {m_0}{phi _{r1}}left( 0 ight){phi _{i1}}left( 0 ight){text{ = }}} & {{text{2}}{text{π}} left( {int_0^{{r_{{text{pi}}}}} {{m_1}{phi _{r1}}{phi _{i1}}r} {text{d}}r + int_{{r_{{text{pi}}}}}^{{r_{{text{po}}}}} {{m_2}{phi _{r2}}{phi _{i2}}r} {text{d}}r + } ight.} & {left. {int_{{r_{{text{po}}}}}^{{r_{text{b}}}} {{m_3}{phi _{r3}}{phi _{i3}}r} {text{d}}r} ight) + {m_0}{phi _{r1}}left( 0 ight){phi _{i1}}left( 0 ight)} {{text{ }}} end{split}$$  |
$$ begin{split} {k_{ir}} =& intlimits_{{A_1}} {{D_1}{nabla ^4}left( {{phi _{r1}}} ight){phi _{i1}}{text{d}}A + intlimits_{{A_2}} {{D_2}{nabla ^4}left( {{phi _{r2}}} ight){phi _{i2}}{text{d}}A} } {text{ }} + & {text{ }} intlimits_{{A_3}} {{D_3}{nabla ^4}left( {{phi _{r3}}} ight){phi _{i3}}{text{d}}A{text{ = 2}}{text{π}} Biggl[{14} {int_0^{{r_{text {pi}}}} {{D_1}{nabla ^4}left( {{phi _{r1}}} ight){phi _{i1}}r} {text{d}}r + } } & {int_{{r_{text {pi}}}}^{{r_{{text{po}}}}} {{D_2}{nabla ^4}left( {{phi _{r2}}} ight){phi _{i2}}r} {text{d}}r + int_{{r_{{text{po}}}}}^{{r_{text{b}}}} {{D_3}{nabla ^4}left( {{phi _{r3}}} ight){phi _{i3}}r} {text{d}}r} Biggl]{14}{text{ }}end{split}$$  |
$$ {theta _i} = frac{{{d_{31}}left( {{h_{text{p}}} + {h_{text{b}}}} ight){text{π}} }}{{S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}left( {{r_{{text{po}}}}frac{{{text{d}}{phi _{i2}}}}{{{text{d}}r}} {{r_{{text{po}}}}} - {r_{{text{pi}}}}frac{{{text{d}}{phi _{i2}}}}{{{text{d}}r}} {{r_{{text{pi}}}}} } ight) $$  |
$$ begin{split} {p_i} &= intlimits_{{A_1}} {{m_1}{phi _{i1}}} {text{d}}A + intlimits_{{A_2}} {{m_2}{phi _{i2}}{text{d}}A} + intlimits_{{A_3}} {{m_3}{phi _{i3}}{text{d}}A} + {m_0}{phi _{i1}}left( 0 ight) = & {text{ 2}}{text{π}} Biggr( {int_0^{{r_{{text{pi}}}}} {{m_1}{phi _{i1}}r} {text{d}}r + int_{r_{{text{pi}}}}^{{r_{{text{po}}}}} {{m_2}{phi _{i2}}r{text{d}}r} + } & {int_{{r_{{text{po}}}}}^{{r_{text{b}}}} {{m_3}{phi _{i3}}r} {text{d}}r} Biggr) + {m_0}{phi _{i1}}left( 0 ight) end{split} $$  |
$$ begin{split} {eta _i} = &frac{{left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}}}{{2S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}int_{{A_{text{p}}}} {left[ {phi _{i2}^{''}left( r ight) + frac{1}{r}phi _{i2}'left( r ight)} ight]} {text{d}}A = &frac{{{text{π}} left( {{h_{text{p}}} + {h_{text{b}}}} ight){d_{31}}}}{{S_{11}^Eleft( {1 - {v_{text{p}}}} ight)}}int_{{r_{{text{pi}}}}}^{{r_{{text{po}}}}} {left[ {rphi _{i2}^{''}left( r ight) + phi _{i2}'left( r ight)} ight]{text{d}}r} end{split}qquadqquad $$  |
1.2
电压和功率输出闭合解
假设
ight) = a{{
m{e}}^{{
m{j}}omega t}}$

$$ {boldsymbol{f}} = - {boldsymbol{p}}ddot yleft( t ight) = - {boldsymbol{p}}a{{ m{e}}^{{ m{j}}omega t}} $$  | (19) |
式中, a和ω分别表示基础激励的加速度幅值和频率.
基于线性机电假设, 广义坐标和输出电压可表示为
$$ left. begin{array}{l}{boldsymbol{q}}left( t ight) = {boldsymbol{varTheta}} {{ m{e}}^{{ m{j}}omega t}}vleft( t ight) = V{{ m{e}}^{{ m{j}}omega t}}end{array} ight} $$  | (20) |
式中,


将式(19)、式(20)代入式(17)、式(18), 得到能量采集器在短路(RL→0)和断路(RL→∞)状态下的固有频率、系统的响应幅值和电压幅值为
$$ left. begin{array}{l} left| { - {boldsymbol{M}}{omega ^2} + {boldsymbol{K}}} ight| = 0{text{ }}left( {{R_{text{L}}} to 0} ight) left| { - {boldsymbol{M}}{omega ^2} + {boldsymbol{K}} + dfrac{{{boldsymbol{theta}} {{boldsymbol{eta}} ^{text{T}}}}}{{{{{C}}_{text{p}}}}}} ight| = 0{text{ }}left( {{R_{text{L}}} to infty } ight) end{array} ight} $$  | (21) |
$$ {boldsymbol{varTheta}} = {left( { - {boldsymbol{M}}{omega ^2} + {boldsymbol{D}}{ m{j}}omega + {boldsymbol{K}} + dfrac{{{boldsymbol{theta}} {{boldsymbol{eta}} ^{text{T}}}{ m{j}}omega }}{{{C_{text{P}}}{ m{j}}omega + {{{R_{text{L}}}^{ - 1}}}}}} ight)^{ - 1}}left( { - {boldsymbol{p}}a} ight) $$  | (22) |
$$ begin{split} &V = - dfrac{{{ m{j}}omega }}{{{C_{text{p}}}{ m{j}}omega + {{{R_{text{L}}^{-1}}}}}}{{boldsymbol{eta}} ^{text{T}}}.&;;;;;;;{left( { - {boldsymbol{M}}{omega ^2} + {boldsymbol{D}}{ m{j}}omega + {boldsymbol{K}} + dfrac{{{boldsymbol{theta}} {{boldsymbol{eta}} ^{text{T}}}{ m{j}}omega }}{{{C_{text{p}}}{ m{j}}omega + {{{R_{text{L}}^{ - 1}}}}}}} ight)}left( { - {boldsymbol{p}}a} ight) end{split}$$  | (23) |
功率幅值可以定义为
$$ P = frac{{{V^2}}}{{{R_{text{L}}}}} $$  | (24) |
求解

$$ {R_{text{L}}} = left({{{C_{text{p}}}{ m{j}}omega + dfrac{{{{boldsymbol{eta}} ^{ m{T}}}{boldsymbol{theta}} { m{j}}omega }}{{ - {boldsymbol{M}}{omega ^2} + {boldsymbol{D}}{ m{j}}omega + {boldsymbol{K}}}}}} ight)^{-1} $$  | (25) |
2.
结果与讨论
本节, 选择黄铜为基体结构, PZT-5H[31]为压电层来研究附加质量块的压电圆板能量采集器的采集性能. 压电圆板能量采集器的参数如表1所示.
表
1
圆板能量采集器的参数
Table
1.
The parameters of the circular energy harvester
table_type1 ">
| Parameter | Unit | Value |
| Eb | GPa | 90 |
| $ S_{11}^E $ | m2/N | 1.65 × 10?11 |
| ρb | kg/m3 | 8500 |
| ρp | kg/m3 | 7500 |
| vb | — | 0.33 |
| vp | — | 0.2897 |
| d31 | m/V | ?2.74 × 10?10 |
| $varepsilon _{33}^T$ | F/m | 3.021 × 10?8 |
| hb | mm | 0.2 |
| hp | mm | 0.2 |
| rb | mm | 28 |
| μ | s?1 | 57.7715 |
| γ | s | 7.7022 × 10?6 |
下载: 导出CSV
|显示表格
2.1
收敛性研究
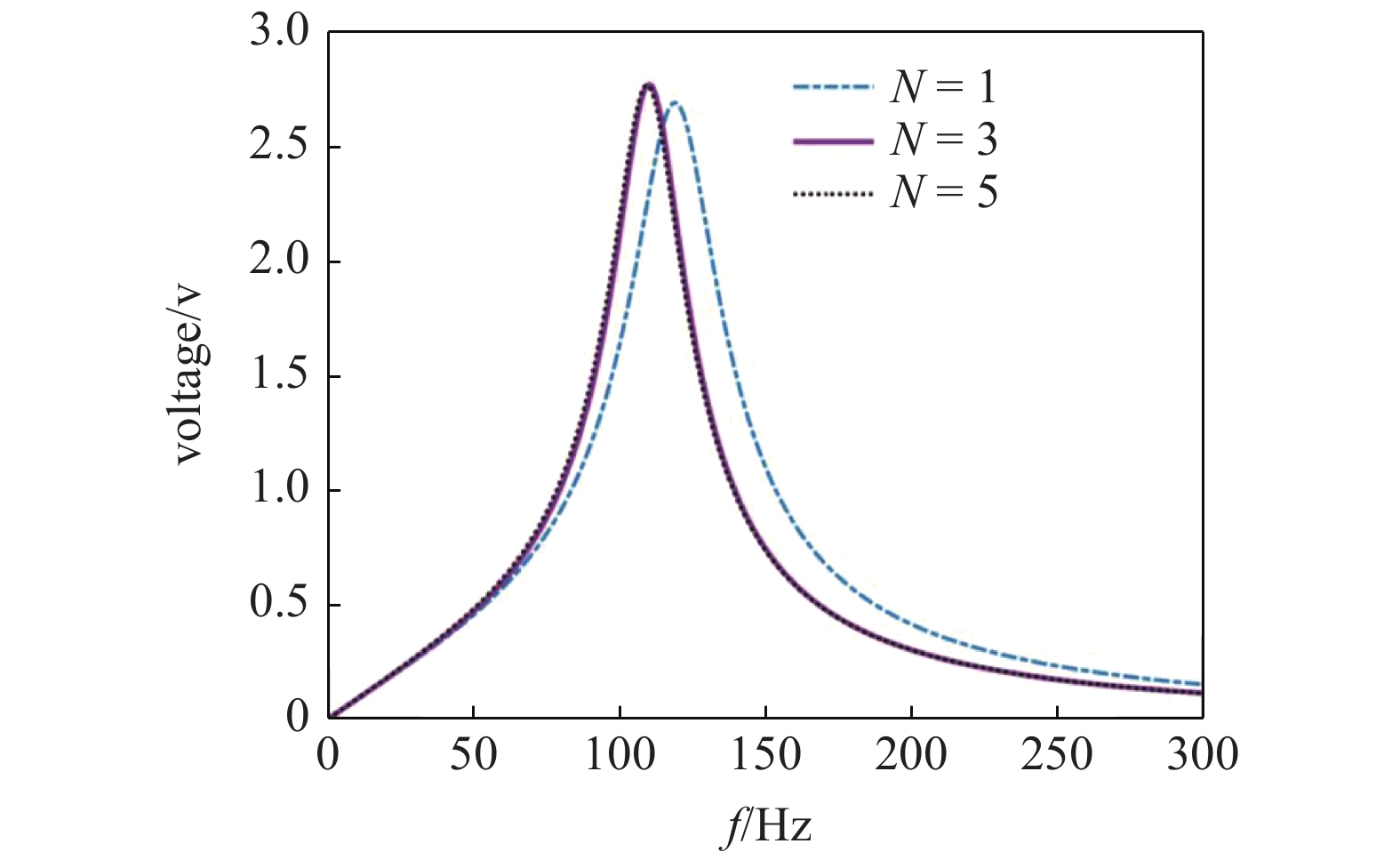
首先, 收敛性研究来确定准确预测出输出电压和功率的假设模态数量. 图2绘制了不同模态数量对应的电压频响图, 其他参数分别为rpi = 2 mm, rpo = 20 mm, RL = 25 kΩ, m0 = 74.3 g和a = 0.1g. 显然, 当N ≥ 3时, 结果趋于收敛, 因此选择N = 3进行数值分析.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
不同模态数下输出电压随基础激励频率变化
Figure
2.
The variation of the voltage output with base excitation frequency for different number of modes
下载: 全尺寸图片
幻灯片
2.2
有限元仿真和验证
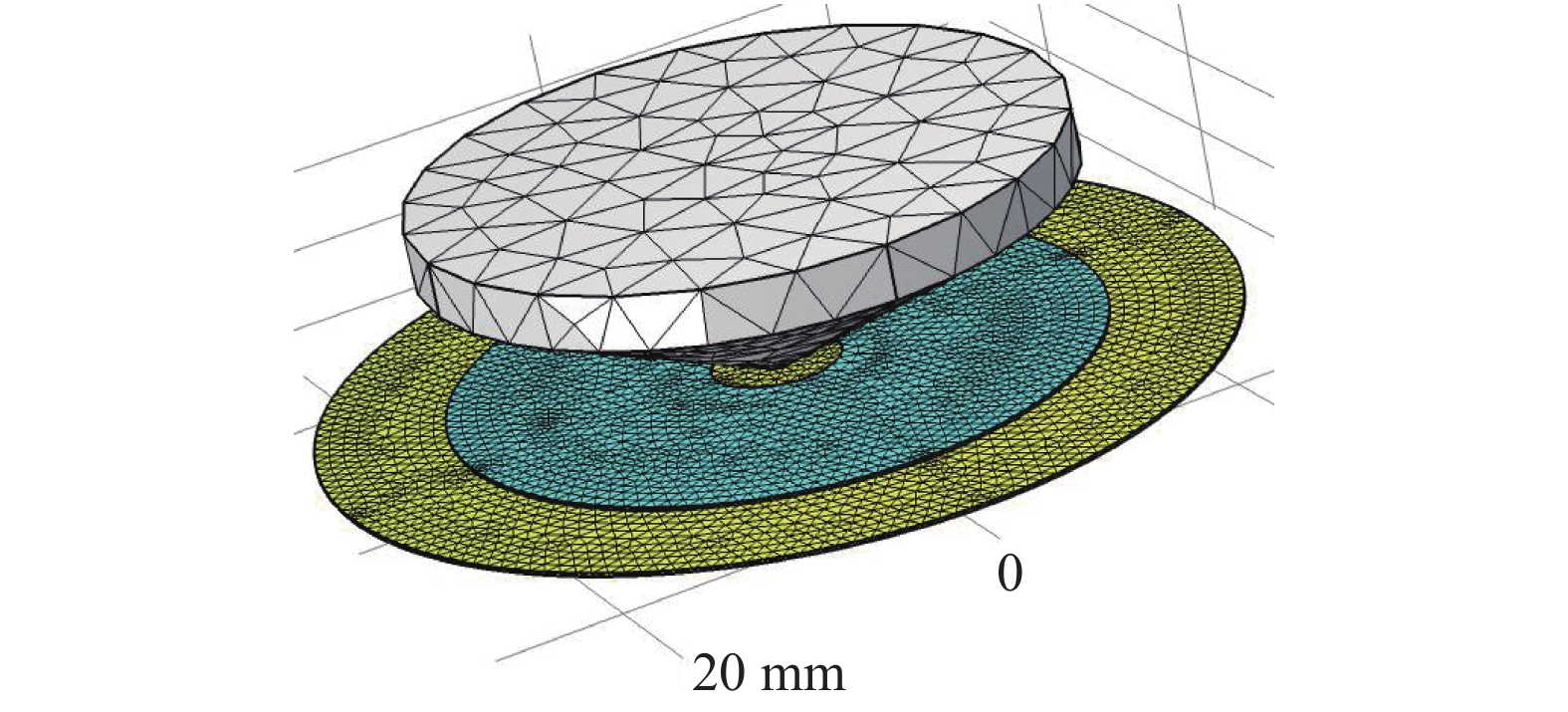
为验证理论推导的正确性, 采用有限元软件COMSOL建立了压电圆板能量采集器有限元分析模型, 如图3所示, 其中, 蓝色和黄色分别表示压电片和基体黄铜. 接下来, 使用压电和固体力学模块对压电圆板能量采集器进行模态分析, 稳态响应分析.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
压电圆板能量采集器的有限元模型
Figure
3.
Finite element model of the piezoelectric circular plate energy harvester
下载: 全尺寸图片
幻灯片
无附加质量时圆板能量采集器固有频率的解析计算与有限元计算结果对比, 如表2所示. 从表2中可以观察到最大相对误差为0.397%, 这说明了理论计算与有限元计算结果高度一致, 验证了理论推导的正确性. 表3总结了m0 = 74.3 g时圆板能量采集器固有频率的理论计算与有限元仿真结果, 同时有限元仿真中考虑了附加质量的接触半径, 定义χ = rm/rb (质量块与压电复合板的接触半径与基板半径比值). 分析可得, 当χ = 1/28时, 最大相对误差为1.141%, 当χ = 1/14时, 最大相对误差增大至5.87%. 表明相对误差随着质量块与复合板的接触半径的增加而增加. 产生误差的主要原因是在理论模型中, 将质量块考虑为中心质点, 而实际模型中, 质量块与复合板的接触半径会影响能量采集器的固有频率. 综上所述, 随着质量块与复合板接触半径的减小, 理论模型和有限元模型一致性增强.
表
2
m0 = 0时压电圆板能量采集器的固有频率理论值与仿真值比较
Table
2.
Comparison of natural frequency of circular energy harvester with m0 = 0 from theory and simulation
table_type2 ">
| rpi/mm | RL = 0 Ω | RL = 10 kΩ | RL→∞ | ||||||||
| FEA/Hz | model/Hz | error/% | FEA/Hz | model/Hz | error/% | FEA/Hz | model/Hz | error/% | |||
| 0 | 581.73 | 580.72 | ?0.174 | 656.66 | 654.05 | ?0.397 | 663.88 | 662.87 | ?0.152 | ||
| 3 | 572.56 | 571.56 | ?0.175 | 640.32 | 638.01 | ?0.361 | 647.41 | 646.75 | ?0.102 | ||
| 4 | 566.81 | 565.82 | ?0.175 | 629.94 | 627.88 | ?0.328 | 636.95 | 636.46 | ?0.077 | ||
| 5 | 560.64 | 559.64 | ?0.178 | 618.72 | 616.81 | ?0.309 | 625.64 | 625.48 | ?0.026 | ||
下载: 导出CSV
|显示表格
表
3
m0 = 74.3 g时压电圆板能量采集器的固有频率理论值与仿真比较
Table
3.
Comparison of natural frequency of circular energy harvester with m0 = 74.3 g from theory and simulation
table_type2 ">
| rpi/mm | RL = 0 Ω | RL→∞ | |||||||||
| model/Hz | FEA (χ = 1/28)/Hz | error/% | FEA (χ = 1/14)/Hz | error/% | model/Hz | FEA (χ = 1/28)/Hz | error/% | FEA (χ = 1/14)/Hz | error/% | ||
| 0 | 109.81 | 110.23 | ?0.383 | 113.6 | ?3.33 | 125.61 | 126.88 | ?1.003 | 130.89 | ?4.04 | |
| 3 | 97.89 | 97.73 | 0.164 | 102.02 | ?4.05 | 108.72 | 108.27 | 0.411 | 113.96 | ?4.60 | |
| 4 | 92.85 | 92.03 | 0.893 | 96.81 | ?4.09 | 101.54 | 100.42 | 1.116 | 106.55 | ?4.70 | |
| 5 | 87.57 | 86.58 | 1.141 | 91.66 | ?4.46 | 94.04 | 93.26 | 0.835 | 99.56 | ?5.87 | |
下载: 导出CSV
|显示表格
2.3
参数对能量采集器采集性能的影响
附加质量块的压电圆板能量采集器的解析解是必不可少的, 它可以根据具体的要求快速设计采集器. 本节基于闭合解探讨负载阻抗、附加质量、压电板的内外径对能量采集器采集性能的影响, 并通过有限元仿真进行验证. 在有限元仿真中质量块与压电复合板的接触半径rm = 1 mm.
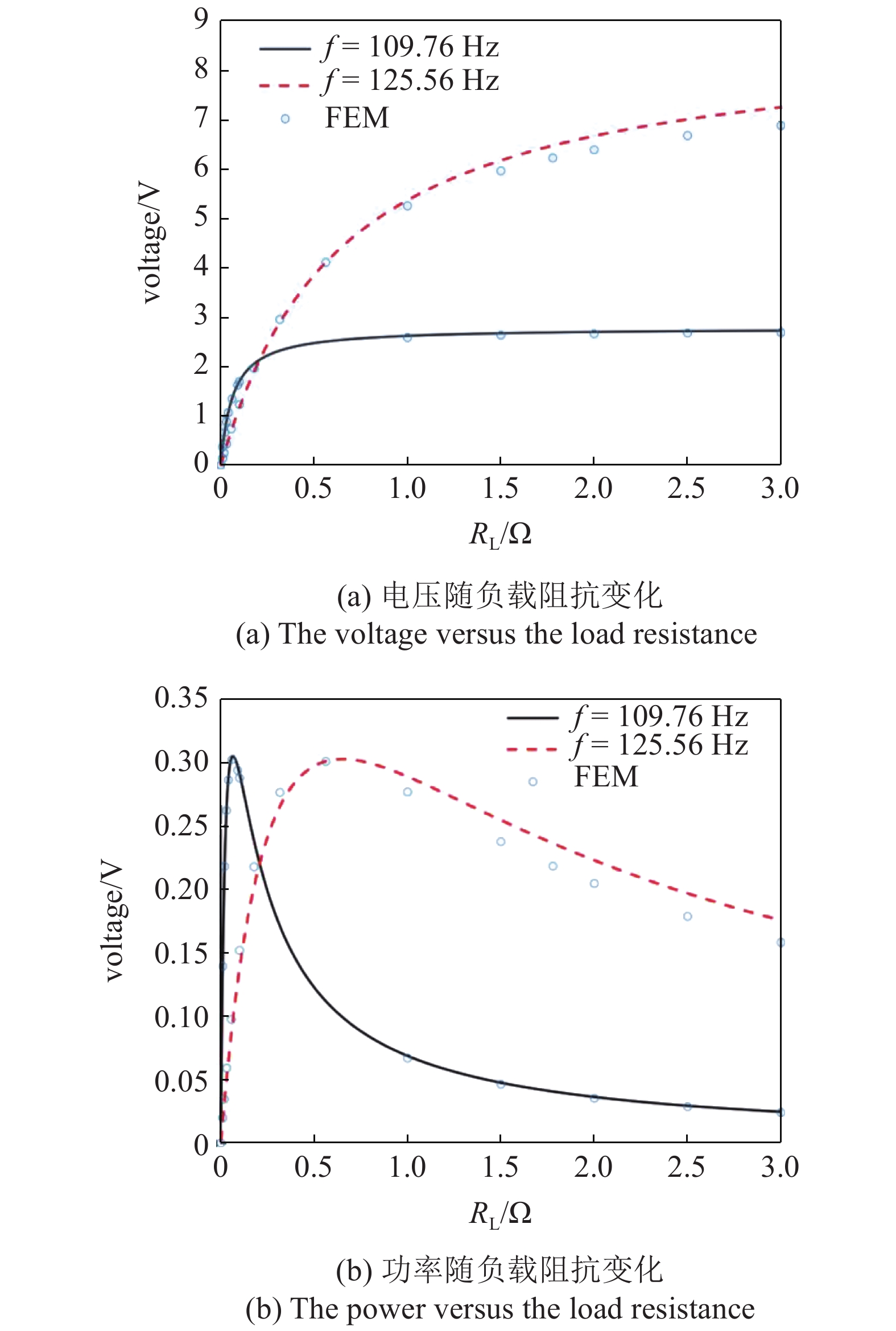
图4绘制了在短路和断路共振频率处激励时, 电压和功率随负载阻抗的变化, 其余参数分别为rpi = 0 mm, rpo = 20 mm, a = 0.1g, m0 = 74.3 g. 给出的结果表明理论解(线)与有限元解(空心点)高度一致. 分析可知, 给定基础激励频率, 电压随负载阻抗的增大而单调升高, 进而趋于稳定. 输出功率先增大再降低, 且不同基础激励频率下系统的最优阻抗也不同, 通过方程(25)得到最优阻抗. 从图4中还可以观察到, 负载阻抗较小时, 由于系统接近于短路, 因而短路共振频率激励下(f = 109.76 Hz) 的输出电压和功率相对较高. 随负载阻抗的增大, 曲线交于RL = 20.5 kΩ处, 此时电压和功率相等, 越过该点后, 由于负载阻抗较大, 系统接近开路状态, 断路共振频率激励下 (f = 125.56 Hz)的电压和功率较大.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
负载阻抗对输出电压和功率的影响
Figure
4.
The effect of the load resistance on the output voltage and power
下载: 全尺寸图片
幻灯片
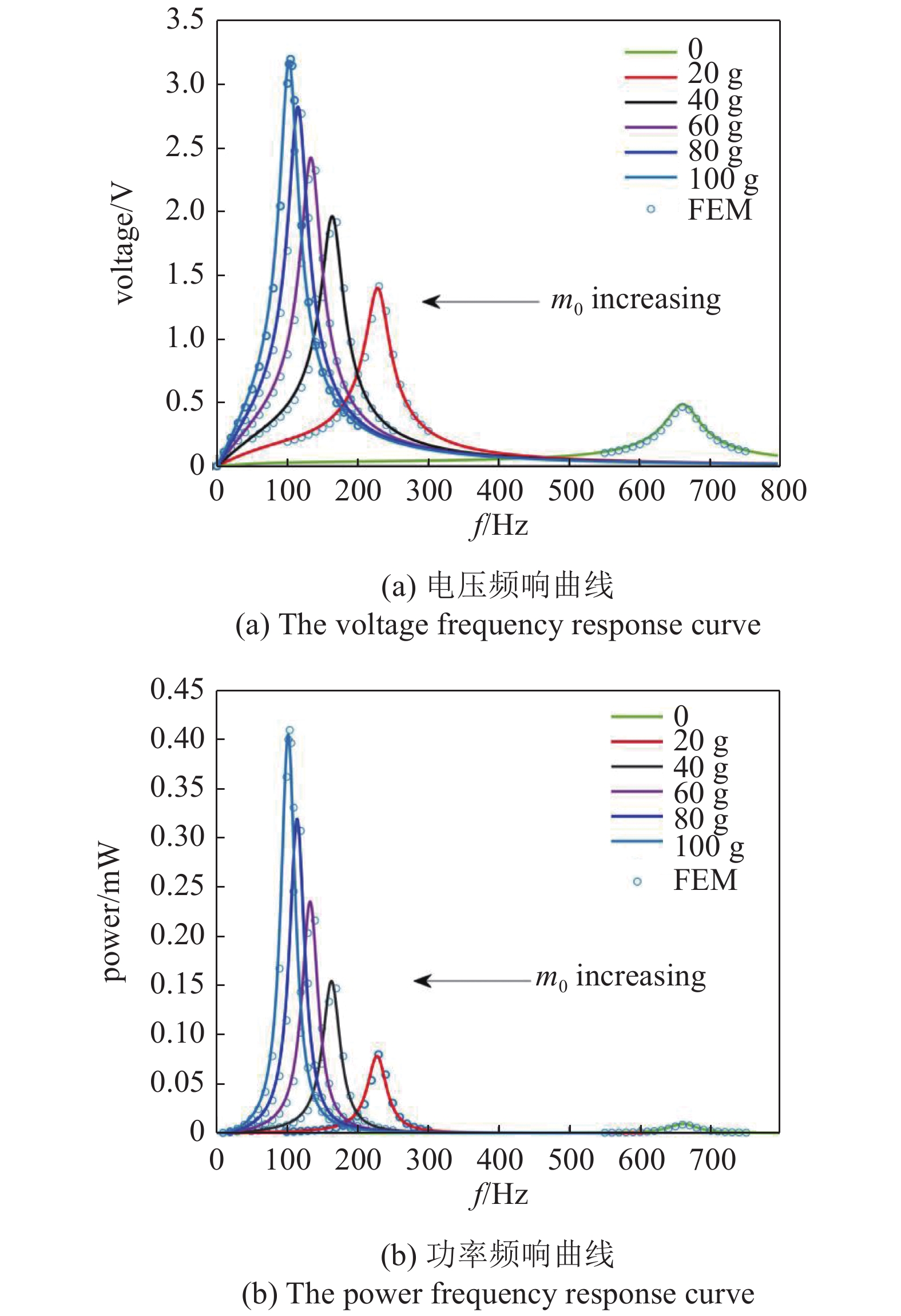
附加质量对压电能量采集器输出电压和功率的影响如图5所示, 其余参数分别为rpi = 0 mm, rpo = 20 mm, a = 0.1g, RL = 25 kΩ. 显然, 与无质量块相比, 附加20 g质量块的能量采集器固有频率从661.38 Hz降低到228.228 Hz, 输出电压和功率分别增长了187.74%和724.21%. 这表明质量荷载能够有效降低采集器的固有频率和增加其采集性能. 然而, 增加质量荷载对提高采集器的采集性能是有限制的, 具体而言, 附加40 g质量块的能量采集器输出电压和功率相较于20 g, 分别提升了40%和97%; 而附加60 g质量块的能量采集器的输出电压和功率相较于40 g, 分别提升了23%和52%. 显然随着质量块重量的提升, 电压和功率输出增长率降低. 且过重的质量块容易造成压电陶瓷板破裂.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
附加质量对能量采集器采集性能的影响
Figure
5.
The influence of the mass on the harvesting performance of the energy harvester
下载: 全尺寸图片
幻灯片
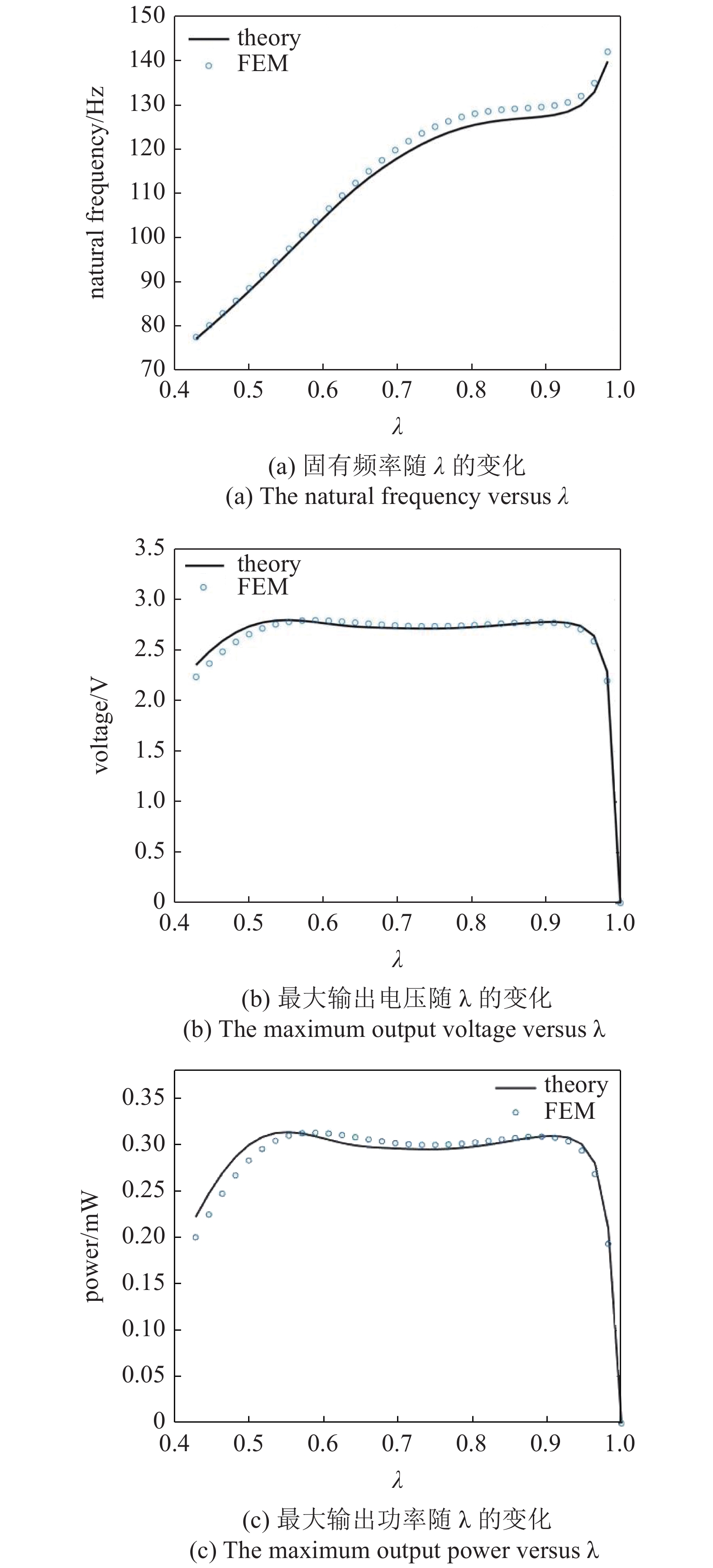
压电片外半径对固有频率、最大输出电压和功率的影响如图6所示, 定义λ = rpo/rb (压电片外半径与基板半径比值), 其余参数分别为rpi = 0, a = 0.1g, RL = 25 kΩ, m0 = 74.3 g. 图6(a)显示, 能量采集器的固有频率随外半径的增加而增大, 当λ大于0.928时, 固有频率斜率增大. 图6(b)和图6(c)描绘了最大输出电压和功率随λ的变化. 显然, 在λ




 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
压电片外径对能量采集器的固有频率、最大输出电压和功率的影响
Figure
6.
The effect of the outer radius of the piezoelectric plate on the natural frequency, maximum output voltage and power of the energy harvester
下载: 全尺寸图片
幻灯片
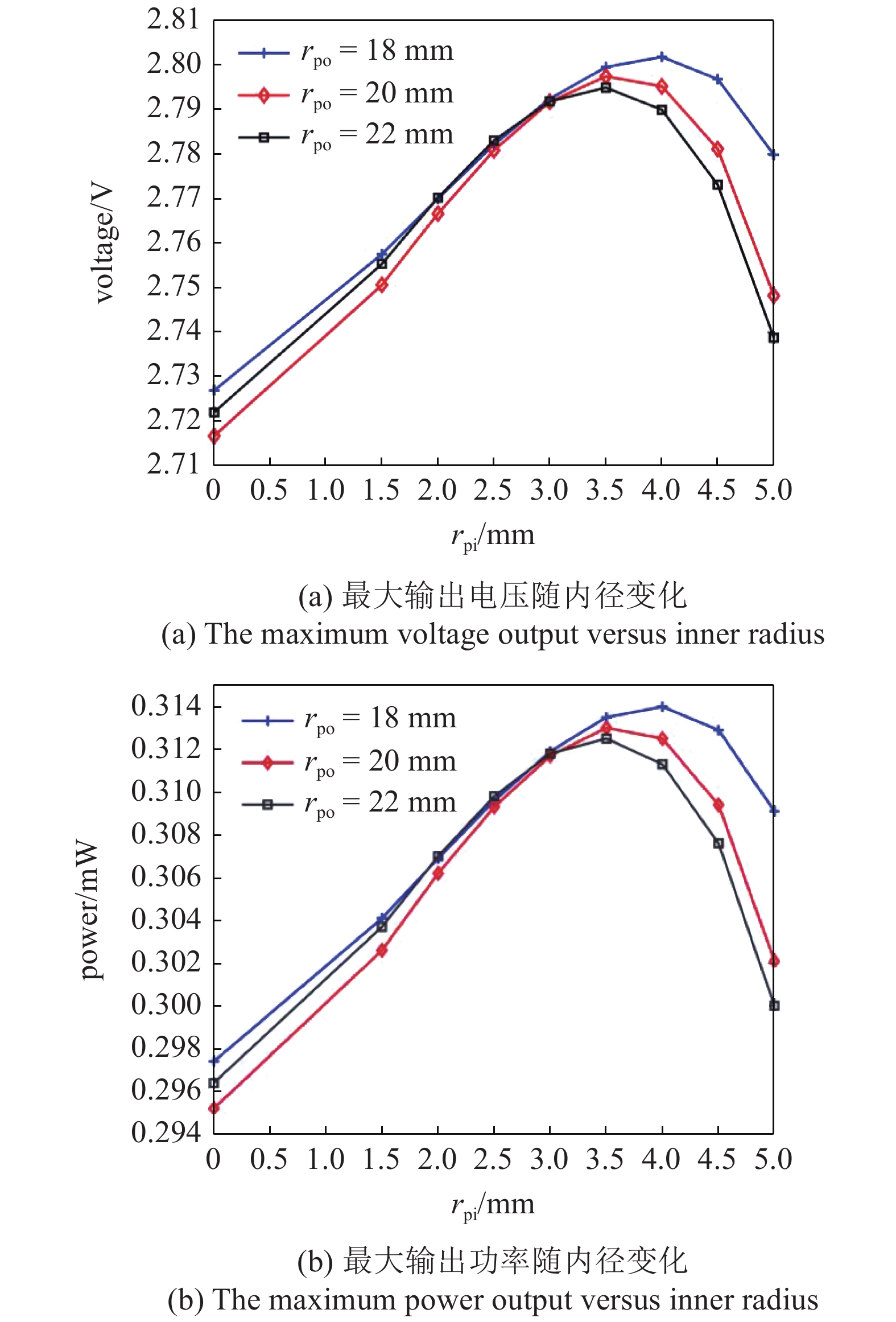
图7(a)和图7(b)绘制了不同的外半径下, 最大输出电压和功率随压电板内径的变化. 其余参数分别为m0 = 74.3 g, a = 0.1g, RL = 25 kΩ. 分析可得, 给定压电片外径, 随着内径的增大, 最大电压和功率的输出先增大再降低. 为了更具体地说明压电片内径对能量采集器性能的影响, 以外径为20 mm的压电圆板为例具体分析, 如图7(c)和图7(d)所示. 随着内径的增大, 共振频率降低, 最大输出功率和电压增加, 直至内径为3.5 mm, 此时, 共振频率为100.6 Hz, 输出功率和电压分别达到最大值0.313 mW和2.7974 V. 随着内径的进一步增大, 共振频率持续降低, 输出电压和功率开始下降. 因此, 相较于无孔的压电片, 内径位于2.5 ~ 4 mm范围内的压电片可以提高能量采集器的采集性能.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-7-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-7-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure7-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
压电片内半径对能量采集器采集性能的影响
Figure
7.
The effect of the inner radius of the piezoelectric plate on the harvesting performance of energy harvester
下载: 全尺寸图片
幻灯片
3.
结论
基于基尔霍夫薄板理论, 应用广义哈密顿原理建立了附加质量块的压电圆板能量采集器的理论模型. 采用数值分析和有限元仿真研究各参数对压电圆板能量采集器的采集性能的影响. 得到以下结论.
(1) 随着质量块与复合板接触半径的减小, 理论模型和有限元模型一致性增强.
(2) 能量采集器的输出电压、功率受负载阻抗、附加质量、压电片内外径等的综合影响. 随负载阻抗的增加, 能量采集器的输出电压增加, 直至趋于稳定, 输出功率先增加再降低. 不同基础激励频率下系统的最优阻抗也不同.
(3) 质量块的引入有效降低了能量采集器的固有频率, 提高了其采集性能. 与无质量块相比, 附加20g质量块的能量采集器固有频率降低了65%, 输出电压和功率分别增长了187.74%和724.21%.
(4) 压电片外径的增加会增大能量采集器的固有频率. 设置压电片内径为0, 在λ

(5) 相较于无孔的压电片, 压电片内径的合理选择不仅可以降低能量采集器的固有频率, 还可以提高其采集性能.
附录A

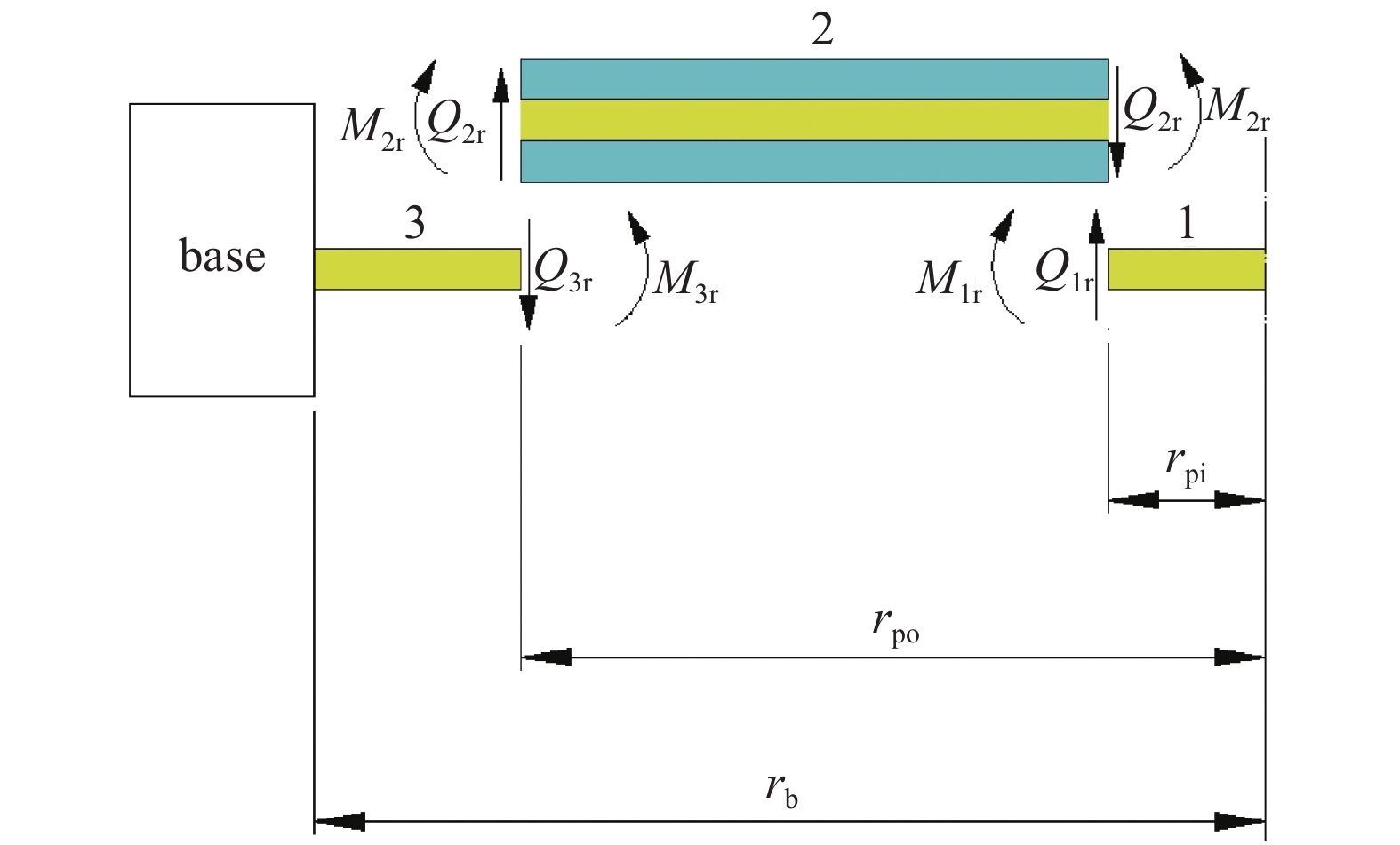
为得到压电复合板的振型, 将压电复合板分为3部分, 每部分的力学行为和边界条件如图A1所示.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-A1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-441-A1.jpg'" class="figure_img
figure_type1 bbb " id="Suppl-FigureA1" />
A1
能量采集器3个截面受力分析
A1.
The force analysis of the three sections of the energy harvester
下载: 全尺寸图片
幻灯片
基于弹性板的弯曲振动理论, 假定
ight) $

$$ left. begin{array}{l} {phi _{1r}}(r) ={A_1}{{ m{J}}_0}left( {{beta _1}r} ight) + {C_1}{{ m{I}}_0}left( {{beta _1}r} ight),qquad{text{ 0}} leqslant r leqslant {r_{{text{pi}}}} {phi _{2r}}(r) ={A_2}{{ m{J}}_0}left( {{beta _2}r} ight) + {B_2}{{ m{Y}}_0}left( {{beta _2}r} ight) + qquad {C_2}{{ m{I}}_0}left( {{beta _2}r} ight) + {D_2}{{ m{K}}_0}left( {{beta _2}r} ight),qquad{text{ }}{r_{{text{pi}}}} leqslant r leqslant {r_{{text{po}}}} {phi _{3r}}(r) = {A_3}{{ m{J}}_0}left( {{beta _3}r} ight) + {B_3}{{ m{Y}}_0}left( {{beta _3}r} ight) + {C_3}{{ m{I}}_0}left( {{beta _3}r} ight) + qquad {D_3}{{ m{K}}_0}left( {{beta _3}r} ight),qquad {text{ }}{r_{{text{po}}}} leqslant r leqslant {r_{text{b}}} end{array} ight} tag{A1}$$  |
式中J0, Y0, K0和I0均为零阶贝塞尔函数.

r = rpi处的边界条件为
$$ left. {begin{array}{*{20}{l}}{phi _{1r}}{|_{{r_{{ m{pi}}}}}} = {phi _{2r}}{|_{{r_{{ m{pi}}}}}}dfrac{{{ m{d}}{phi _{1r}}}}{{{ m{d}}r}}{|_{{r_{{ m{pi}}}}}} = dfrac{{{ m{d}}{phi _{2r}}}}{{{ m{d}}r}}{|_{{r_{{ m{pi}}}}}}{M_{1r}}{|_{{r_{{ m{pi}}}}}} = {M_{2r}}{|_{{r_{{ m{pi}}}}}}{Q_{1r}}{|_{{r_{{ m{pi}}}}}} = {Q_{2r}}{|_{{r_{{ m{pi}}}}}}end{array}} ight} tag{A2}$$  |
式中
$$ begin{array}{l} {M_{1r}} = - {D_1}left( {dfrac{{{partial ^2}{phi _{1r}}}}{{partial {r^2}}} + dfrac{{{v_1}}}{r}dfrac{{partial {phi _{1r}}}}{{partial r}}} ight) {M_{2r}} = - {D_2}left( {dfrac{{{partial ^2}{phi _{2r}}}}{{partial {r^2}}} + dfrac{{{v_2}}}{r}dfrac{{partial {phi _{2r}}}}{{partial r}}} ight) {Q_{1r}} = - {D_1}dfrac{partial }{{partial r}}left( {dfrac{{{partial ^2}{phi _{1r}}}}{{partial {r^2}}} + dfrac{1}{r}dfrac{{partial {phi _{1r}}}}{{partial r}}} ight) {Q_{2r}} = - {D_2}dfrac{partial }{{partial r}}left( {dfrac{{{partial ^2}{phi _{2r}}}}{{partial {r^2}}} + dfrac{1}{r}dfrac{{partial {phi _{2r}}}}{{partial r}}} ight) end{array} $$  |
r = rpo处的边界条件为
$$ left. begin{array}{l} {phi _{2r}}{|_{{r_{{text{po}}}}}} = {phi _{3r}}{|_{{r_{{text{po}}}}}}dfrac{{{text{d}}{phi _{2r}}}}{{{text{d}}r}}{|_{_{{r_{{text{po}}}}}}} = dfrac{{{text{d}}{phi _{3r}}}}{{{text{d}}r}}{|_{_{{r_{{text{po}}}}}}} {M_{2r}}{|_{{r_{{text{po}}}}}} = {M_{3r}}{|_{_{{r_{{text{po}}}}}}} {Q_{2r}}{|_{_{{r_{{text{po}}}}}}} = {Q_{3r}}{|_{_{{r_{{text{po}}}}}}} end{array} ight} tag{A3}$$  |
式中
$$ begin{array}{l} {M_{3r}} = - {D_3}left( {dfrac{{{partial ^2}{phi _{3r}}}}{{partial {r^2}}} + dfrac{{{v_3}}}{r}dfrac{{partial {phi _{3r}}}}{{partial r}}} ight) {Q_{3r}} = - {D_3}dfrac{partial }{{partial r}}left( {dfrac{{{partial ^2}{phi _{3r}}}}{{partial {r^2}}} + dfrac{1}{r}dfrac{{partial {phi _{3r}}}}{{partial r}}} ight) end{array} $$  |
夹紧边r = rb处的边界条件为
$$ left. begin{array}{l} {phi _{3r}}{|_{{r_{text{b}}}}} = 0dfrac{{{text{d}}{phi _{3r}}}}{{{text{d}}r}}{|_{{r_{text{b}}}}} = 0 end{array} ight} tag{A4}$$  |
