引 言
无线监测技术在设备监测和安全监测等领域的应用越来越广泛[1-3], 但无线监测系统的续航问题一直制约其发展, 化学电池供电存在维护成本高、环境污染和寿命有限等问题[4]. 振动能量俘获技术可以将环境振动能收集并转换为电能, 有望实现无线监测系统自供电[5-8].
压电悬臂梁俘能器具有结构简单、尺寸紧凑等优点, 国内外****对此开展了大量的研究工作[9-12]. 经典的线性压电俘能器只能在其共振频率附近有效工作, 当环境激励频率远离俘能器共振频率时, 俘能器可俘获的能量显著减少, 这一问题严重制约俘能器的实际应用[13]. 为提升俘能器俘能性能, 研究人员提出了各种拓频方法, 根据不同原理, 可分为线性拓频和非线性拓频[14], 线性拓频方式主要包括: 多悬臂梁阵列[15]、L型梁[16]、多自由度梁[17]. 尽管上述结构能够有效拓宽俘能频带, 但就其结构中单一悬臂梁而言, 其工作频带宽度仍然很窄, 系统结构尺寸较大, 单位体积的俘能效率并不高. 非线性拓频方式主要有: 加装弹簧[18]、限制振幅[19]和磁场耦合[20]等方法, 非线性方法能够拓宽单一悬臂梁的工作带宽, 在各种非线性拓频方法中, 引入非线性磁力的俘能器结构较为简单, 在磁力作用下, 俘能器能够在双稳态、三稳态甚至更多稳态下运行[21-23]. 为比较三稳态压俘能器和双稳态压电俘能器的性能, Zhou等[24]对比分析了两种压电俘能器的频域响应特性. Zhu等[25]分析了随机激励下两种压电俘能器的输出性能, 研究结果均表明: 三稳态压电俘能器具有更浅的势阱, 更宽的俘能频带以及较高的输出. Leng等 [26]的研究表明: 三稳态压电俘能器在低强度和较高强度下的最佳磁距较为接近, 意味着最佳磁距下的俘能器能够有效适应激励强度的变化. Jung等 [27]设计了一种外部磁铁可旋转的三稳态压电俘能器, 研究表明, 调整外部磁铁旋转至合适倾角能够有效提高输出性能. Wang等[28]在考虑悬臂梁几何非线性(GNL)和引力效应(GE)的基础上,建立分布式参数模型, 研究表明: 较低激励下, 具有GNL和GE的三稳态压电俘能器具有非对称势阱, 能够提升俘能器输出性能. Cao等[29]分析了几何参数对三稳态压电俘能器势阱深度的影响, 较浅的势阱能够有效拓宽工作频带并且提升低频环境下的俘能性能. 由于环境中的激励具有多方向的特点, 采用直梁结构的压电俘能器难以在多方向激励环境中实际应用. Chen等[30]通过仿真发现引入拱形结构的压电悬臂梁应变分布更加均匀, 有利于提高能量转换效率和电压输出. Zhao等[31]设计了一种弧形梁俘能器, COMSOL仿真表明弧形梁能够响应来自不同方向的激励. 针对曲梁的研究[32-33]表明: 采用曲梁结构的俘能器有着良好的输出性能, 且曲梁可拉伸变形, 有望实现多方向的能量俘获.
引入非线性磁场的压电俘能器结构简单, 较传统线性结构有着更宽的工作频带. 本文针对煤矿井下无线监测节点供电需求, 为适应采掘激励低频、多方向等特点, 引入拱形结构, 设计一种线形?拱形组合梁式三稳态压电俘能器, 建立线形?拱形组合梁式压电俘能器动力学模型, 借助数值仿真从时域角度分析了俘能器磁铁水平间距、垂直间距和激励加速度对动力学响应特性的影响规律, 并搭建实验平台, 验证理论分析的正确性, 研究可为线形?拱形组合梁式三稳态压电俘能器的优化设计提供理论指导.
1.
三稳态压电俘能器结构
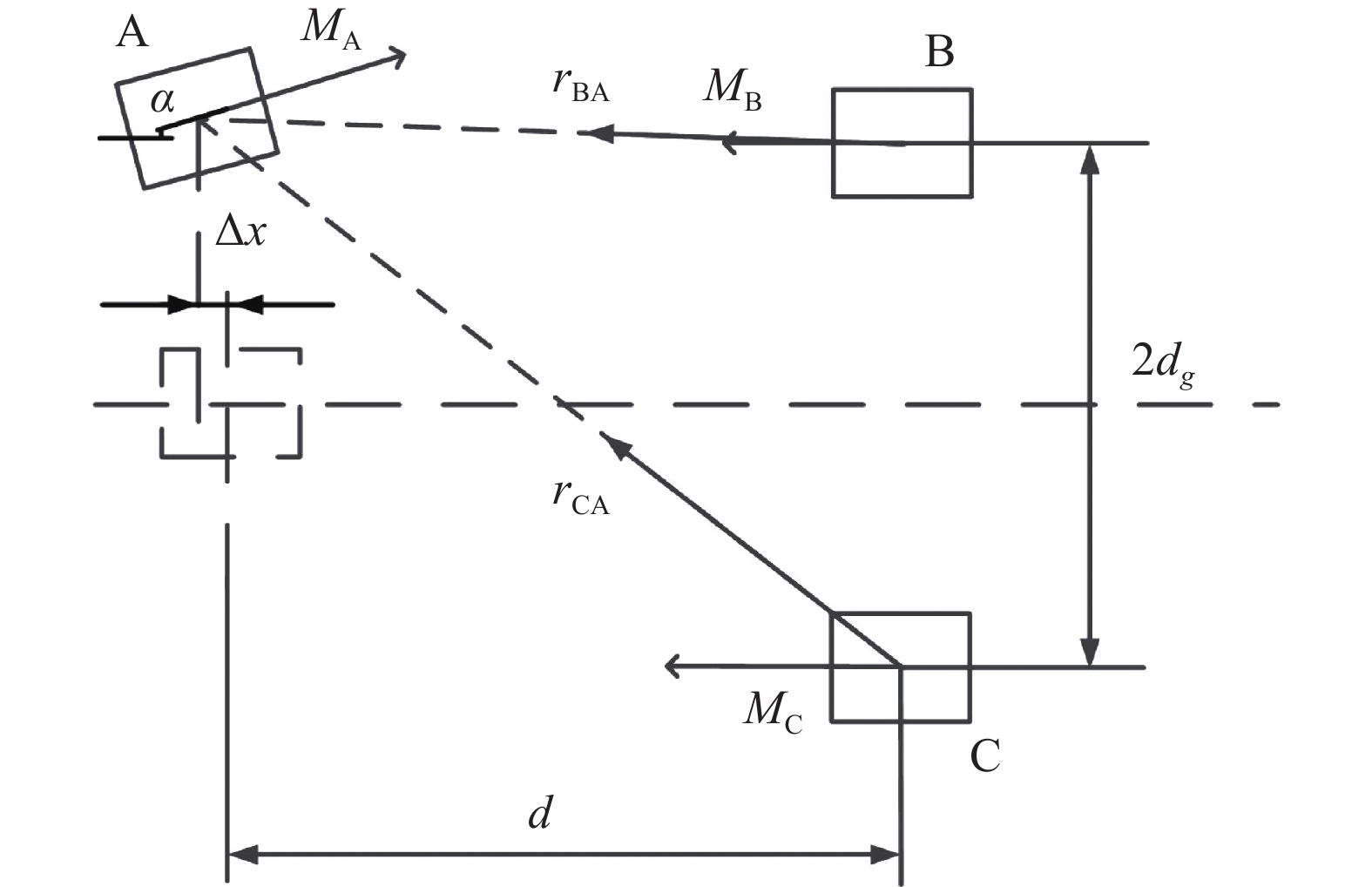
如图1为线形?拱形组合梁式三稳态压电俘能器结构示意图, 结构由线形?拱形组合梁、柔性压电材料PVDF和磁铁A, B, C组成. 线形?拱形组合梁上黏贴PVDF, 外接负载电阻












ight)$


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
线形?拱形组合梁式三稳态压电俘能器结构示意图
Figure
1.
Schematic diagram of linear-arch beam TPEH
 下载:
下载: 全尺寸图片
幻灯片
2.
三稳态压电俘能器动力学模型
2.1
非线性磁力建模
为准确分析压电悬臂梁振动特性, 需要确定其末端受到的非线性磁力大小, 磁铁A, B, C间的几何关系如图2所示, 本文采用磁偶极子模型描述非线性磁力, 磁铁B在磁铁A处产生的磁通密度为[34]
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
非线性磁力模型
Figure
2.
Nonlinear magnetic force model
下载: 全尺寸图片
幻灯片
$$ {B_{{ m{BA}}}} = - frac{{{mu _0}}}{{4{text{π}} }}nabla frac{{{M_{ m{B}}}{{{{boldsymbol r}}}_{{ m{BA}}}}}}{{left | {{{{{boldsymbol r}}}_{{ m{BA}}}}} ight |_2^3}} $$  | (1) |
式中,


m{BA}}}}$

m{B}}}$

磁铁B在磁铁A处产生的势能为
$$ {U_{{ m{BA}}}} = - {B_{{ m{BA}}}} cdot {M_{ m{A}}} $$  | (2) |
式中,
m{A}}} $



ight)$


ight)$

$$ left.begin{split}&{{boldsymbol{r}}_{{ m{BA}}}} = - d cdot {boldsymbol{i}} + f cdot {boldsymbol{ j}}&{M_{ m{A}}} = {m_{ m{A}}}{V_{ m{A}}}cos alpha cdot {boldsymbol{ i}} + {m_{ m{A}}}{V_{ m{A}}}sin alpha cdot {boldsymbol{ j}}&{M_{ m{B}}} = - {m_{ m{B}}}{V_{ m{B}}} cdot {boldsymbol{ i}}&cos alpha = frac{1}{{sqrt {{{left[ {wprime left( {L,t} ight)} ight]}^2} + 1} }}end{split} ight}$$  | (3) |
式中, 分别




m{A}}} $

m{B}}} $

m{A}}} $

m{B}}} $

$$ begin{split}& {U_{{ m{BA}}}} = &quad frac{{{mu _0}{m_{ m{A}}}{V_{ m{A}}}{m_{ m{B}}}{V_{ m{B}}}}}{{sqrt {{{left[ {wprime left( {L,t} ight)} ight]}^2} + 1} {{left( {{d^2} + {f_{{ m{BA}}}}^2} ight)}^{frac{5}{2}}}}} cdot &quad frac{1}{{4{text{π}} }}left[ { - {f_{{ m{BA}}}}^2 + 2{d^2} - 3d{f_{{ m{BA}}}}wprime left( {L,t} ight)} ight] end{split} $$  | (4) |
式中,
m{BA}}}} = wleft( {L,t}
ight) - {d_g}$

同理, 磁铁C在磁铁A处产生的势能
$$ begin{split}& {U_{{ m{CA}}}} = &quad frac{{{mu _0}{m_{ m{A}}}{V_{ m{A}}}{m_{ m{C}}}{V_{ m{C}}}}}{{sqrt {{{left[ {wprime left( {L,t} ight)} ight]}^2} + 1} {{left( {{d^2} + {f_{{ m{CA}}}}^2} ight)}^{frac{5}{2}}}}} cdot &quad frac{1}{{4{text{π}} }}left[ { - {f_{{ m{CA}}}}^2 + 2{d^2} - 3d{f_{{ m{CA}}}}wprime left( {L,t} ight)} ight] end{split} $$  | (5) |
式中,
m{CA}}}} = wleft( {L,t}
ight) + {d_g}$

磁铁B, C在组合梁末端磁铁A处产生的总势能
$$ {U_m} = {U_{{ m{BA}}}} + {U_{{ m{CA}}}} $$  | (6) |
因此磁铁A受到的非线性磁力
$$ {F_m} = frac{{partial {U_m}}}{{partial wleft( {L,t} ight)}} $$  | (7) |
2.2
线形?拱形组合梁恢复力
采用YLK-10测力计测量线形?拱形组合梁在

$$ {F_r} = 56;681.2w{left( {L,t} ight)^3} - 254.586w{left( {L,t} ight)^2} + 14wleft( {L,t} ight) $$  | (8) |
式中,
ight) $



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
线形?拱形组合梁位移?恢复力曲线图
Figure
3.
Nonlinear restoring force of linear-arch beam
下载: 全尺寸图片
幻灯片
从图3中可以看出, 线形?拱形组合梁不同于传统的直梁, 其恢复力具有非线性, 以
ight) = 0 $

2.3
压电俘能器动力学方程
为确定组合梁的振动位移
ight) $

$$ wleft( {x,t} ight) = sumlimits_{i = 1}^n {{varphi _i}left( x ight)} {q_i}left( t ight) $$  | (9) |
其中,



ight) $

ight) $

由于环境中的激励以低频为主, 组合梁的一阶模态弯曲振动起主导作用, 因此本文仅考虑组合梁的一阶模态. 对于线形?拱形组合梁, 由于结构复杂, 难以获取模态函数解析表达式, 由于其一端夹紧固定于基座之上, 另一端自由, 使用容许函数表示模态函数[37]
$$ varphi left( x ight) = 1 - cos left[ {frac{{left( {2i - 1} ight){text{π}} x}}{{2L}}} ight] $$  | (10) |
采用拉格朗日方程建立线形?拱形组合梁的运动方程
$$ {L_a}left( {x,t} ight) = {T_S} + {T_P} + {T_M} + {W_P} - {U_r} - {U_M} $$  | (11) |
式中,






金属基层和压电层的动能和组合梁的势能可表示为
$$ {T_S} = frac{1}{2}{ ho _S}{A_S}int_0^L {{{Big[ {dot wleft( {x,t} ight) + dot zleft( t ight)} Big]}^2}} { m{d}}x $$  | (12) |
$$ {T_P} = frac{1}{2}{ ho _P}{A_P}int_0^L {{{Big[ {dot wleft( {x,t} ight) + dot zleft( t ight)} Big]}^2}} { m{d}}x $$  | (13) |
$$ {U_r} = int {{F_r}} { m{d}}qleft( t ight) $$  | (14) |
式中, “·”为表示

ho _S} $


ho _P} $


ight) $

组合梁末端磁铁的动能为
$$ {T_M} = frac{1}{2}{M_t}Big[ {dot wleft( {L,t} ight) + dot zleft( t ight)} Big] + frac{1}{2}{I_t}{left[ {frac{{{partial ^2}left( {L,t} ight)}}{{partial tpartial x}}} ight]^2} $$  | (15) |
式中


压电层在



$$ {E_3} = - frac{{vleft( t ight)}}{{{h_p}}} $$  | (16) |
$$ {D_3} = {e_{31}}{S_1} + epsilon _{33}^S{E_3} $$  | (17) |
式中
ight)}}{{partial {x^2}}}$



当组合梁受激振动形变, 金属基层上的PVDF随之形变, 由压电效应产生电能
$$ begin{split}& {W_P} = frac{1}{2}intlimits_{{V_P}} {{E_3}{D_3}} { m{d}}{V_P} hfill &quad = frac{1}{4}{e_{31}}bleft( {{h_s} + {h_p}} ight)vleft( t ight)frac{{partial wleft( {L,t} ight)}}{{partial x}} + frac{1}{2}{C_p}{v^2}left( t ight) end{split} $$  | (18) |
式中

结合非线性磁力、恢复力的分析, 根据欧拉?伯努利梁理论和基尔霍夫定律可得线形?拱形组合梁的系统动力学方程
$$ Mddot qleft( t ight) + 2delta omega dot qleft( t ight) + {F_r} - theta vleft( t ight) + {F_M} = - beta ddot Zleft( t ight) $$  | (19) |
$$ theta dot qleft( t ight) + {C_P}dot vleft( t ight) + frac{{vleft( t ight)}}{R} = 0 $$  | (20) |
式中
$$begin{split}& M = left( {{ ho _S}{A_S} + { ho _P}{A_P}} ight)int_0^L {{{ {varphi left( x ight)} }^2}} { m{d}}x +&quad {M_t}{ {varphi left( L ight)} ^2} + {I_t}{ {varphi prime left( L ight)}^2} end{split}$$  | (21) |
$$ theta = frac{1}{2}{e_{31}}bleft( {{h_s} + {h_p}} ight)varphi prime left( L ight) $$  | (22) |
$$ beta = left( {{ ho _S}{A_S} + { ho _P}{A_P}} ight)int_0^L {varphi left( x ight){ m{d}}x + {M_t}} varphi left( L ight) $$  | (23) |
式中, “
ight) $


3.
三稳态压电俘能器动力学分析
3.1
势能和磁力分析
表1给出了三稳态压电俘能器中组合梁和磁铁的结构、材料参数.
表
1
三稳态压电俘能器结构和材料参数
Table
1.
Structure and material parameters of TPEH
table_type1 ">
| Parameter | Value | |
| linear-arch beam | $ {L_1} $/mm | 20 |
| $ {h_S} $/mm | 0.2 | |
| $ b $/mm | 8 | |
| $ r $/mm | 10 | |
| density/ (kg·m?3) | $ 8300 $ | |
| Young's modulus / (N·m?2) | $1.28 times {10^{11}}$ | |
| PVDF | permittivity constant/ (F·m?1) | $ 1.10 times {10^{ - 10}} $ |
| Young's modulus / (N·m?2) | $ 3 times {10^9} $ | |
| density / (kg·m?3) | $ 1780 $ | |
| $ {h_P} $/mm | 0.11 | |
| magnet | structure size/mm | $ 10 times 10 times 5 $ |
| ${mu _0}$/ (H·m?1) | $4{text{π}} times {10^{ - 7} }$ |
下载: 导出CSV
|显示表格
系统总势能为
$$ U = {U_M} - {U_r} $$  | (24) |
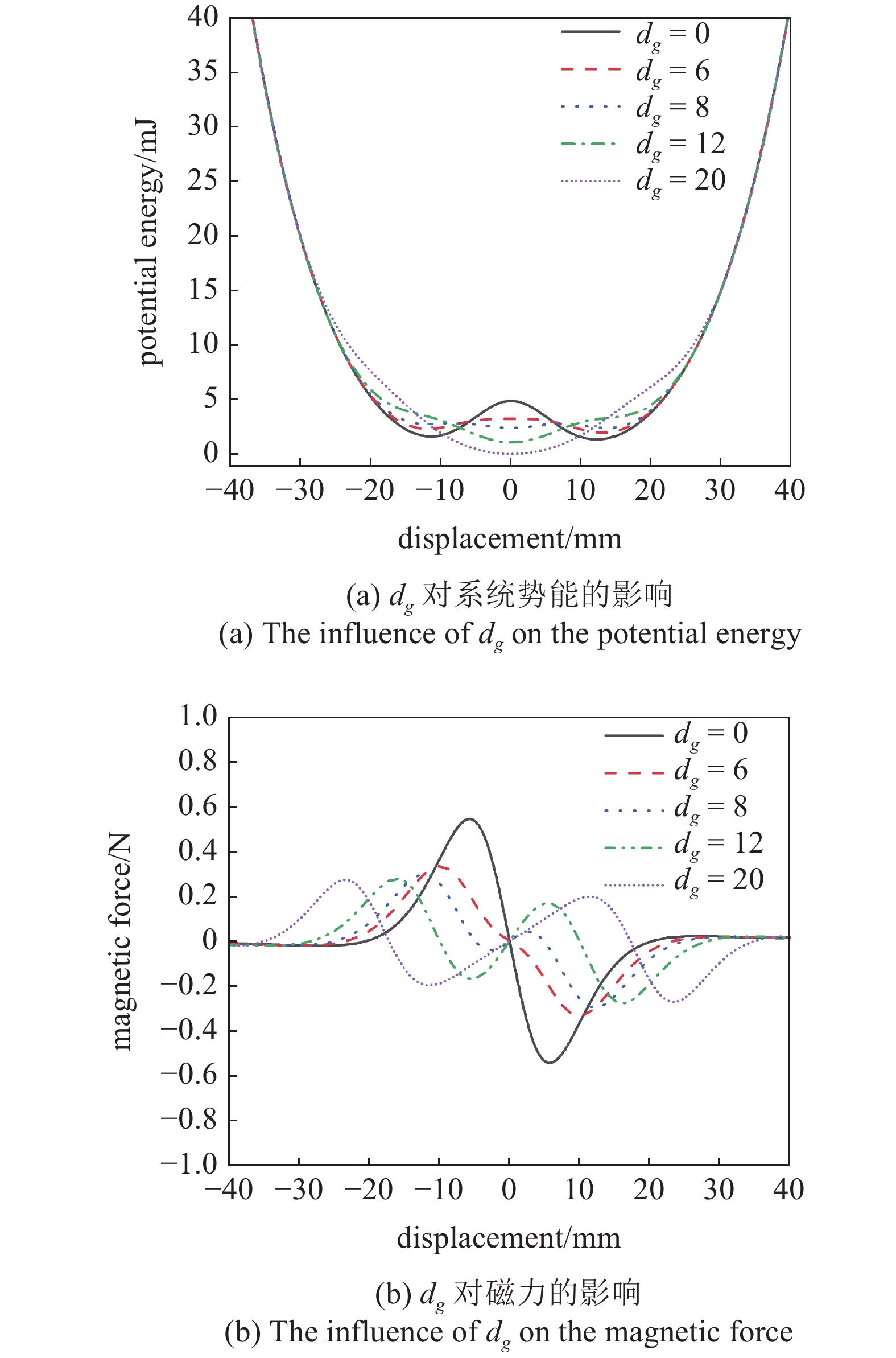
由式(24)可知, 水平磁距


图4显示了








 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4

Figure
4.
The influence of
 下载:
下载: 全尺寸图片
幻灯片
图5显示了






 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-5.jpg'" class="figure_img
figure_type2 ccc " id="Figure5" />
图
5

Figure
5.
The influence of
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-6-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-6-1.jpg'" class="figure_img
figure_type2 ccc " id="Figure6-1" />
6
不同水平间距

6.
Phase portrait and time-displacement diagram of different magnetic distance
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-6.jpg'" class="figure_img
figure_type2 ccc " id="Figure6" />
图
6
不同水平间距

Figure
6.
Phase portrait and time-displacement diagram of different magnetic distance
 下载:
下载: 全尺寸图片
幻灯片
3.2
系统动力学特性分析
系统势能和磁力分析结果表明: 磁铁间距对系统势能和磁力有着显著影响, 一定激励条件下, 调整磁铁间距能够使系统实现不同的运动状态, 当磁铁间距较小时, 磁铁A与磁铁B, C间作用力较大, 此时势阱较深, 低水平的激励下, 系统难以越过势垒, 脱离势阱较深的位置. 因此, 合理的选择磁铁间距显得尤为重要, 本节将对磁铁水平间距



3.2.1
水平间距$d$
对系统动力学特性的影响
当







3.2.2
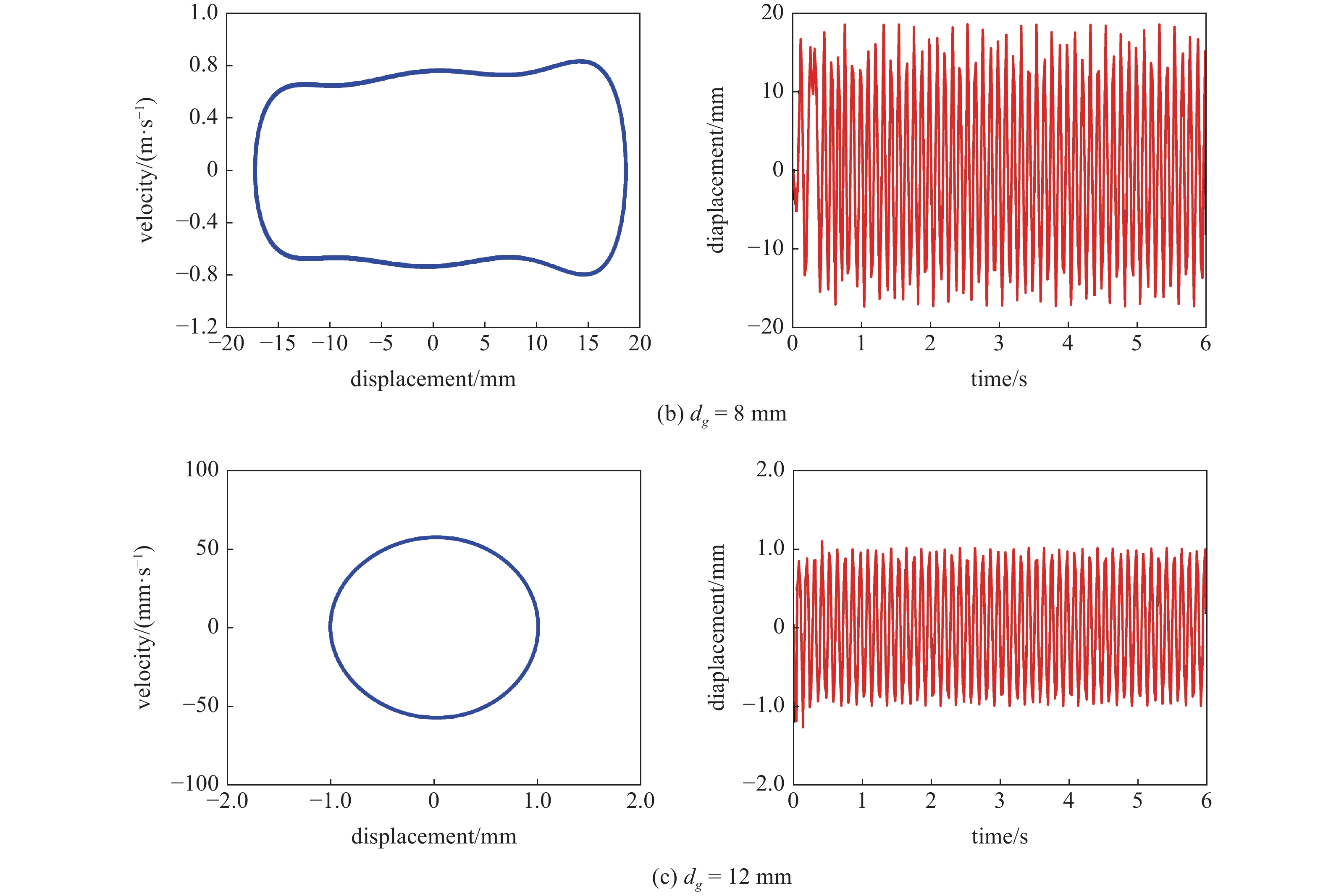
垂直间距${d_g}$
对系统动力学特性的影响
取








 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-7-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-7-1.jpg'" class="figure_img
figure_type2 ccc " id="Figure7-1" />
7
不同垂直间距

7.
Phase portrait and time-displacement diagram of different magnetic distance
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-7.jpg'" class="figure_img
figure_type2 ccc " id="Figure7" />
图
7
不同垂直间距

Figure
7.
Phase portrait and time-displacement diagram of different magnetic distance
 下载:
下载: 全尺寸图片
幻灯片
3.2.3
激励加速度$a$
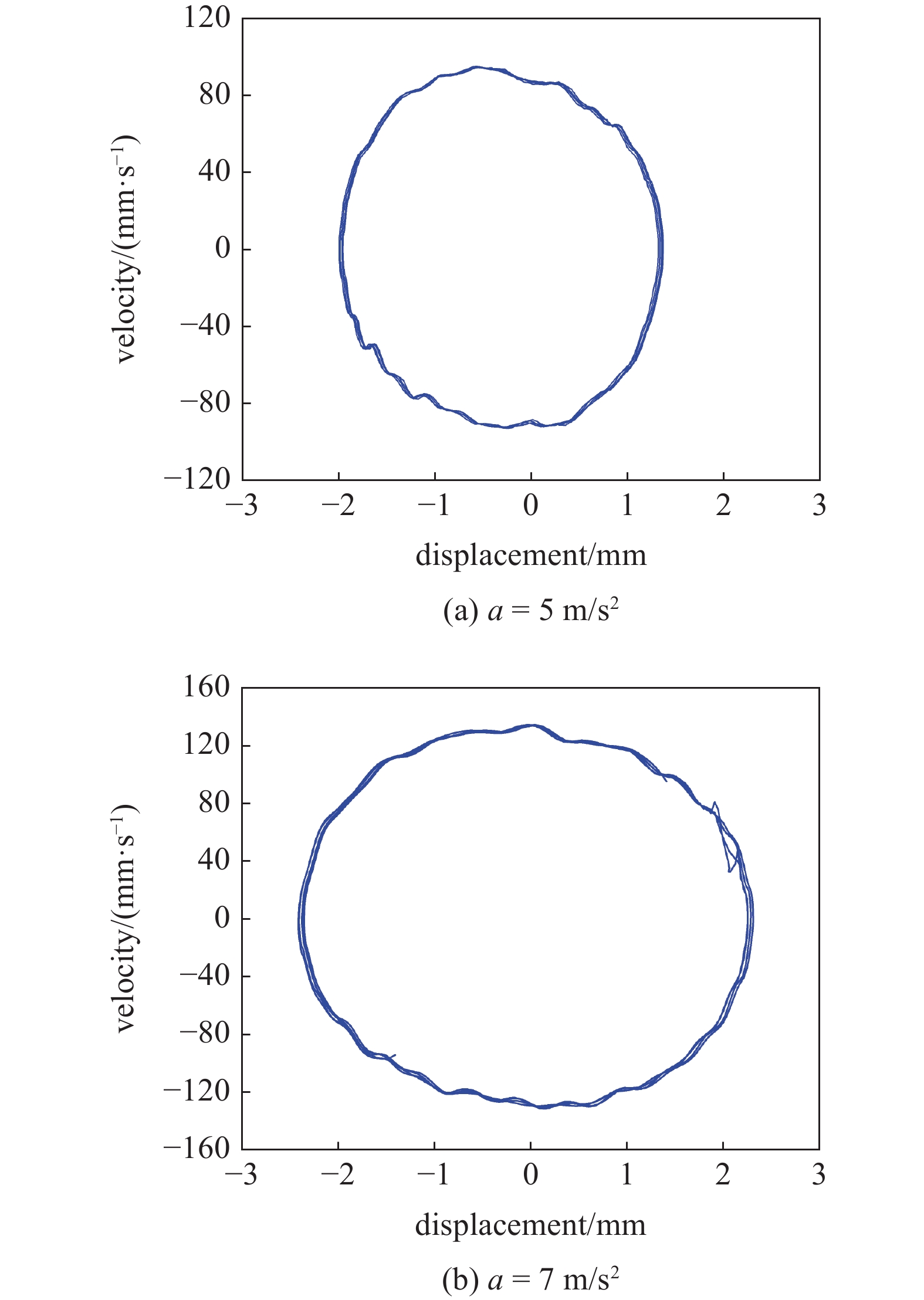
对系统动力学特性的影响
取










 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
不同激励加速度下的系统相图
Figure
8.
Phase portrait of different excitation acceleration
下载: 全尺寸图片
幻灯片
从图6 ~ 图8可以看出, 组合梁运动至两侧稳定位置时速度不相等, 这是由于线形?拱形组合梁非线性恢复力的不对称性所致.
4.
实验验证
为验证俘能器动力学特性理论分析的正确性, 根据表1所示结构参数制作压电俘能器样机并搭建实验平台进行实验验证, 如图9所示, 实验平台由: 计算机、振动控制器、功率放大器、振动台、激光测振仪、COCO80采集仪、线形?拱形组合梁式三稳态压电俘能器及基座组成. 实验中, 通过计算机设置激励条件, 由振动控制器发出激励信号, 经由功率放大器输出至振动台, 振动台按照预设的激励信号运行, 使用激光测振仪实时测量组合梁拱形部分的响应速度.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
实验平台
Figure
9.
Experimental platform
下载: 全尺寸图片
幻灯片
图10所示是





 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-10-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-10-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure10-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-392-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
不同激励加速度下的实验相图
Figure
10.
Experimental phase diagrams under different excitation accelerations
下载: 全尺寸图片
幻灯片
低激励下的实验结果与仿真结果较为吻合, 但随着激励的增大, 特别是当系统作三稳态运动时, 由于组合梁形变较大, 实验与仿真结果之间存在误差, 其主要原因有: (1)线形?拱形组合梁压电俘能器样机制作产生的加工误差, 造成实验条件与仿真存在偏差; (2)实验得到的相图倾斜明显, 而仿真得到的相图倾斜并不明显, 这是由于仿真中未考虑重力因素, 且实验中由于拱形部分的存在, 难以精准测量其形变位移, 导致激光测振仪测量的数据存在偏差.
5.
结 论
本文针对线形?拱形组合梁式三稳态压电俘能器, 基于拉格朗日方程建立了动力学模型, 使用4阶龙格?库塔算法对动力学方程进行数值求解, 分析了不同磁距对系统特征, 初步揭示了不同加速度对系统动力学性能的影响规律, 通过实验验证了理论分析的正确性. 仿真与实验得到以下主要结论.
(1)保持






(2)随着激励水平的增加, 系统更易越过势垒实现阱间运动, 俘能器响应位移随之增大.
(3)线形?拱形组合梁的非对称恢复力导致势能曲线呈现非对称势阱, 这为低激励环境中的俘能器应用提供了新的解决思路.
