引 言
密集颗粒流及气粒两相流大量应用于食品和药物加工、石油化工和能源转化等行业. 由于颗粒与颗粒之间及气体与颗粒之间存在强烈的非线性耗散作用, 密集颗粒流及气粒流动中往往会出现复杂的非均匀多尺度流动现象[1-5]. 近年来, 国内外诸多****致力于采用数值模拟方法来研究这种复杂流动, 目前针对颗粒相的数值模拟方法主要有离散单元法(DEM)和双流体方法(TFM). DEM相当于颗粒相的直接数值模拟, 计算准确性高, 但计算量大; 而TFM方法中颗粒相都被视为完全互穿的连续体, 由单独的质量、动量和能量守恒方程描述. 这种颗粒拟流体的连续性表示, 使得计算量不直接取决于颗粒数, 计算量相对较小. 但需要提供额外的颗粒相本构模型以及气体与颗粒相间作用模型, 而这些模型的可靠性将直接影响到TFM计算结果的准确性.
颗粒动力学理论[6-8](KTGF)被广泛用于推导颗粒相本构模型, 其中包含了描述颗粒与颗粒作用的本构模型和描述颗粒与固体壁面作用的壁面边界条件. 对于后者, 理论研究相对较少, 当前应用最广泛的是Johnson和Jackson边界条件[9], 它包含弹性恢复系数e和光滑因子? 两个输入参数, 分别用以描述颗粒与壁面碰撞时法向和切向上的速度变化. 光滑因子? 的直接实验测量是不可行的, 通常都是通过调整数值来拟合实验数据而获得, 这非常耗时且适用范围窄[10-11]. 为此, 一些****尝试使用颗粒物性和流动参数来建立光滑因子?的函数. Li和Benyahia[12]提出了一个适用于低摩擦系数下的光滑因子函数关联式, 其中光滑因子被拟合为壁面上颗粒法向恢复系数、摩擦系数和无因次滑移速度的函数. Jenkins[13]引入3个可测物性参数, 库伦摩擦系数μ、切向弹性恢复系数

近年来, 随着计算机技术不断提高, 使得机器学习等人工智能技术也快速发展, 其中作为机器学习研究热门之一的人工神经网络模型(ANN)已经发展得较为完善. 人工神经网络是对人脑组织和运行机制的某种抽象、简化和模拟, 根据已知的一系列训练集, 利用黑箱式学习方法的一种高效的数据处理和预测方法, 具有效率高、联想记忆、预测效果好等优点, 因此, 人工神经网络模型逐渐应用于不同学科的研究之中. 如胡洲等[18]采用神经网络建立非球形散体颗粒的休止角模型, 发现休止角随颗粒形状变量、摩擦因数的增加都呈现增大的趋势, 与现有研究结果一致; 闫盛楠等[19]采用人工神经网络模型, 对非球形颗粒气固曳力系数进行了预测及分析, 并将模拟结果同文献中的实验数据进行对比分析, 结果表明, 人工神经网络可用于非球形颗粒气固曳力系数的预测研究.
因此, 本文拟采用DEM方法对颗粒流进行直接模拟, 获得壁面附近颗粒微观运动数据和壁面与颗粒直接作用力; 在此基础上统计分析颗粒的宏观运动特征, 为颗粒动力学理论推导的基本假设提供参考, 并基于人工神经网络模型挖掘颗粒旋转运动变量与颗粒物性参数和平动运动变量之间的隐含关系. 旨在为常规TFM方法建立更加可靠的壁面边界条件寻求可行的方法和基础数据.
1.
数学模型
在DEM模拟中, 每个颗粒的运动受牛顿第二定律支配, 质量为

$${m_i}frac{{{ m{d}}{{boldsymbol{v}}_i}}}{{{ m{d}}t}} = sumlimits_j {left( {{{boldsymbol{F}}_{n,ij}} + {{boldsymbol{F}}_{t,ij}}} ight)} + {m_i}{boldsymbol{g}} $$  | (1) |
$${I_i}frac{{{ m{d}}{{boldsymbol{omega}} _i}}}{{{ m{d}}t}} = sumlimits_j {left( {{{boldsymbol{R}}_{c,ij}} times {{boldsymbol{F}}_{t,ij}} - {mu _r}{R^ * }left| {{{boldsymbol{F}}_{n,ij}}} ight|frac{{{{boldsymbol{omega}} _{r,ij}}}}{{left| {{{boldsymbol{omega}} _{r,ij}}} ight|}}} ight)}$$  | (2) |
式中,








ight)}} $


根据Hertz?Mindlin接触理论[21-22], 法向接触力可以由下式给出
$$begin{split}{boldsymbol{F}}_{n,ij}^{} = &frac{4}{3}{E^ * }sqrt {{R^ * }{delta _{n,ij}}} {delta _{n,ij}}{{boldsymbol{n}}_{ij}} - hfill sqrt {frac{5}{6}} frac{{2ln e}}{{sqrt {{{ln }^2}e + {{text{π}} ^2}} }}cdot&sqrt {2{m^ * }{E^ * }sqrt {{R^ * }{delta _{n,ij}}} } left( {{{boldsymbol{v}}_{n,ij}} cdot {{boldsymbol{n}}_{ij}}} ight){{boldsymbol{n}}_{ij}}end{split}$$  | (3) |
式中,




ight)}} $

ight){E_i}
ight.$

ight){E_j}
ight]$



相应的切向接触力由下式给出
$$begin{split}{{boldsymbol{F}}_{t,ij}} =& 8{G^ * }sqrt {{R^ * }{delta _{n,ij}}} {{boldsymbol{delta}} _{t,ij}}{{boldsymbol{t}}_{ij}} - hfillsqrt {frac{5}{6}} frac{{2ln e}}{{sqrt {{{ln }^2}e + {{text{π}} ^2}} }} &sqrt {8{m^ * }{G^ * }sqrt {{R^ * }{delta _{n,ij}}} } left( {{{boldsymbol{v}}_{t,ij}} cdot {{boldsymbol{t}}_{ij}}} ight){{boldsymbol{t}}_{ij}}end{split}$$  | (4) |
式中,



ight){G_i} }
ight.$

ight){G_j}}
ight]$

切向力的大小受到库仑摩擦定律的限制. 如果式(3)和式(4)计算结果满足以下条件
$$left| {{{boldsymbol{F}}_{t,ij}}} ight| > mu left| {{{boldsymbol{F}}_{n,ij}}} ight|$$  | (5) |
式中,

$$ {{boldsymbol{F}}_{t,ij}} = mu left| {{{boldsymbol{F}}_{n,ij}}} ight|{{boldsymbol{t}}_{ij}} $$  | (6) |
2.
模拟结果与讨论
2.1
模拟工况
在研究颗粒与壁面作用关系时, 可以选择相对简单的模拟对象, 如滚筒、斜槽[23]或者库埃特(Couette)流[17]. 本文以石油化工中常见的滚筒为模拟对象. 事实上, 已经有许多****对滚筒进行各种实验和模拟研究, 如顾丛汇等[24]通过实验和数值模拟研究丝状散体颗粒在滚筒内的停留时间; 胡陈枢等[25]采用DEM方法对滚筒内二元颗粒在不同转速下的运动进行模拟; 张立栋等[26]采用DEM方法研究滚筒内构件对二元颗粒体系运动混合的影响,并分析其增混机理. 但多数研究都是关注滚筒内部颗粒宏观运动特征, 然而颗粒和壁面作用通常至关重要[27-29], 对滚筒而言, 颗粒和壁面间的相互作用驱动着整个颗粒系统运动.
本文模拟的滚筒为Parker等[30]的实验装置. 为了最大限度的接近实验, 模拟采用与实验一致的全尺寸, 颗粒则简化为均一直径. 滚筒壁和颗粒材料均为有机玻璃, 相关结构和物性参数如表1所示. 模拟运行18 s, 时间步长为5.6 × 10?6 s, 为避免初始效应的影响, 用于统计的数据样本取自8 ~ 18 s.
表
1
模拟参数
Table
1.
Simulation parameters
table_type1 ">
| Parameters | Value |
| drum diameter, D/m | 0.1 |
| drum length, L/m | 0.65 |
| drum fill level/% | 35 |
| total number of particles | 72000 |
| particle diameter, d/m | 0.003 |
| particles density, ρ/(kg·m?3) | 2500 |
| Young modulus, E/(N·m?1) | 1.0 × 107 |
| Poisson ratio, $ nu $ | 0.29 |
| restitution coefficient, e | 0.9 |
| sliding friction coefficient, μ | 0.7 |
| rolling friction coefficient, μr | 0.01 |
 下载:
下载: 导出CSV
|显示表格
图1为瞬时颗粒分布, 其中颜色表示速度大小. 图中颗粒速度在轴向具有较好的相似性, 但在两端面附近表层颗粒速度略有增加. Zhang等[31]研究表明端壁摩擦对颗粒轴向扩散具有增强效应, 但其研究的滚筒长径比为1, 而本模拟的滚筒长径比为6.5, 因此端壁摩擦导致的轴向非均匀性较弱, 模拟结果在轴向上具有较好的对称性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-1.jpg'" class="figure_img
figure_type2 ccc " id="Figure1" />
图
1
滚筒内的颗粒分布
Figure
1.
Particle distribution in the drum
下载: 全尺寸图片
幻灯片
图2为各转速下滚筒最低点偏右θ = 30°位置上颗粒切向速度模拟和实验结果对比图. 从图2(a)中可以看出, 摩擦系数取为0.7时得到的切向速度曲线与实验结果一致; 图2(b)中针对不同转速下也获得较好的预测结果, 特别是在近壁区域, 模拟预测与实验结果吻合较好. 通过DEM模拟获得接近物理实际的结果, 将保障后续数据统计分析结果的可靠性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
切向速度与实验数据的比较
Figure
2.
Comparison of the tangential velocity with experiment data
下载: 全尺寸图片
幻灯片
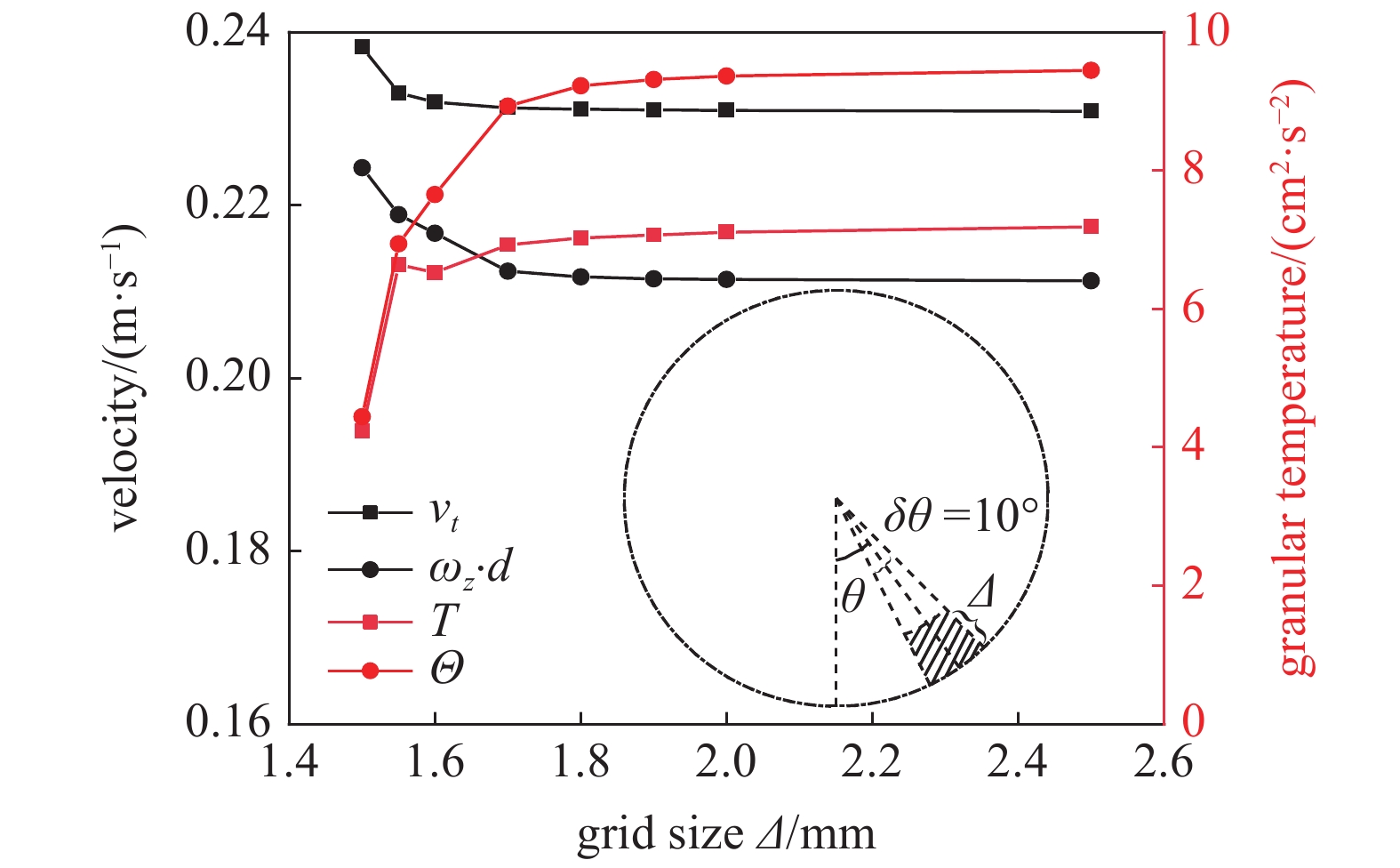
在统计近壁处颗粒信息时, 为保证结果的独立性, 选取贴壁网格应该尽量要小, 同时又要保证一定的颗粒数以减小统计误差. 考虑到颗粒在滚筒轴向的对称性, 贴壁网格在轴向取滚筒全长, 而在横截面上则如图3阴影区域所示, 由周向尺寸δθ和径向尺寸Δ共同确定. 其中径向尺寸Δ决定了统计颗粒靠近壁面的程度, 对近壁颗粒的统计特性更为重要. 图3显示了贴壁网格的径向尺寸Δ与平均颗粒变量(颗粒速度




 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
网格大小与平均颗粒变量的关系
Figure
3.
Relationship between mesh size and averaged particle variables
下载: 全尺寸图片
幻灯片
$$begin{split}T &= frac{1}{3}leftlangle {left( {{boldsymbol{v}} - bar {boldsymbol{v}}} ight) cdot left( {{boldsymbol{v}} - bar {boldsymbol{v}}} ight)} ight angle hfill &= frac{1}{{3N}}sumlimits_{i = 1}^N {left[ {{{left( {{v_{x,i}} - {{bar v}_x}} ight)}^2} + {{left( {{v_{y,i}} - {{bar v}_y}} ight)}^2} + {{left( {{v_{z,i}} - {{bar v}_z}} ight)}^2}} ight]}end{split}$$  | (7) |
$$begin{split}varTheta &= frac{I}{{3m}}leftlangle {left( {{boldsymbol{omega}} - bar {boldsymbol{omega}} } ight) cdot left( {{boldsymbol{omega}} - bar {boldsymbol{omega}} } ight)} ight angle hfill &{text{ }} = frac{I}{{3mN}}sumlimits_{i = 1}^N {left[ {{{left( {{omega _{x,i}} - {{bar omega }_x}} ight)}^2} + {{left( {{omega _{y,i}} - {{bar omega }_y}} ight)}^2} + {{left( {{omega _{y,i}} - {{bar omega }_z}} ight)}^2}} ight]}end{split}$$  | (8) |
式中,


ight
angle $


2.2
颗粒微观运动
2.2.1
平动速度分布
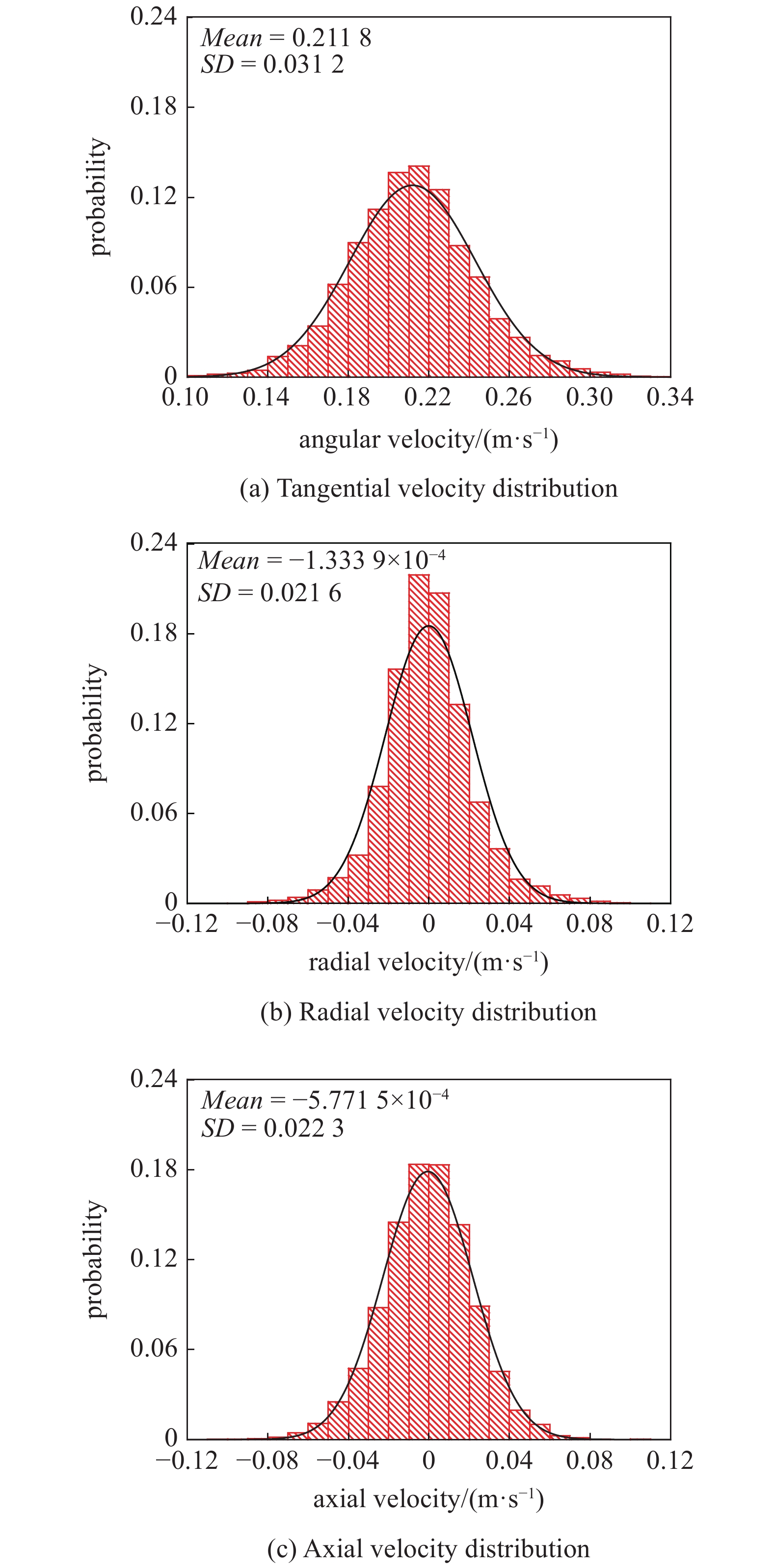
在欧拉方法中, 通常由颗粒动力学理论提供描述颗粒运动特性的本构关系. 颗粒动力学借鉴分子运动论, 假设颗粒运动速度近似满足正态分布, 颗粒壁面边界条件也是基于这样的假设[13]. 对颗粒运动信息进行统计分析, 发现近壁处颗粒的平动速度的确较好地符合正态分布, 如图4所示. 图中统计参数取自滚筒最低点偏右θ = 30°贴壁网格(网格见图3)内的颗粒. 由于受到壁面剪切作用, 切向的颗粒平动速度均值和标准差SD最大; 而在壁面阻碍和轴向对称性作用下, 径向和轴向的颗粒平动速度均值趋近零, 标准差SD也相对较小. 颗粒速度分布的标准差反映了颗粒速度脉动的强弱, 显然, 在壁面作用下颗粒速度脉动呈现出各向异性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
近壁颗粒平动速度分布
Figure
4.
Translational velocity distribution of near-wall particles
下载: 全尺寸图片
幻灯片
在研究壁面边界条件时, 摩擦系数对壁面颗粒运动具有显著影响[31]. 表2给出了不同摩擦系数下, 壁面附近颗粒平动速度分布的统计结果. 其中决定系数R2可以表征正态分布函数拟合的好坏, 取值范围为[0,1], 越接近1表明数据拟合地越好. 由表2可知, 4个摩擦系数下的决定系数均大于0.92, 表明颗粒平动速度都较好地符合正态分布; 此外, 不同摩擦系数下, 切向的标准差SD总是最大的, 表明颗粒平动速度脉动存在各向异性[32].
表
2
平动速度分布的标准差和决定系数
Table
2.
Standard deviation and determination coefficient of translational velocity distribution
table_type1 ">
| μ | 0.3 | 0.5 | 0.7 | 0.9 |
| SDt | 0.02377 | 0.03048 | 0.03122 | 0.02929 |
| SDr | 0.01312 | 0.02087 | 0.02157 | 0.02168 |
| SDz | 0.0189 | 0.02023 | 0.02233 | 0.02215 |
| Rt2 | 0.93513 | 0.96393 | 0.98887 | 0.99515 |
| Rr2 | 0.92683 | 0.93184 | 0.96179 | 0.97895 |
| Rz2 | 0.98524 | 0.99693 | 0.99575 | 0.99548 |
下载: 导出CSV
|显示表格
随着摩擦系数的减小, 各个方向的标准差SD有减小的趋势; 当摩擦系数降为0.3时, 由于颗粒与壁面的摩擦作用减小, 颗粒受壁面剪切激发的程度也相对减弱, 颗粒速度脉动也因此减弱. 这在颗粒动力学理论中表现为颗粒从宏观运动中获得的能量减小, 从而导致颗粒温度下降. 此外, 摩擦系数减小后, 除轴向速度外, 切向和径向速度的决定系数也明显减小, 即正态分布假设的可靠性有所减弱; 这表明近壁颗粒速度分布的主要影响因素仍然是壁面的径向阻碍作用, 其次才是壁面切向的摩擦剪切作用. 因此, 在颗粒动力学理论中考虑颗粒与壁面作用时, 引入颗粒平动速度正态分布假设基本上是合理的, 但更精细的模型还应进一步考虑颗粒平动速度脉动的各向异性.
2.2.2
旋转速度分布
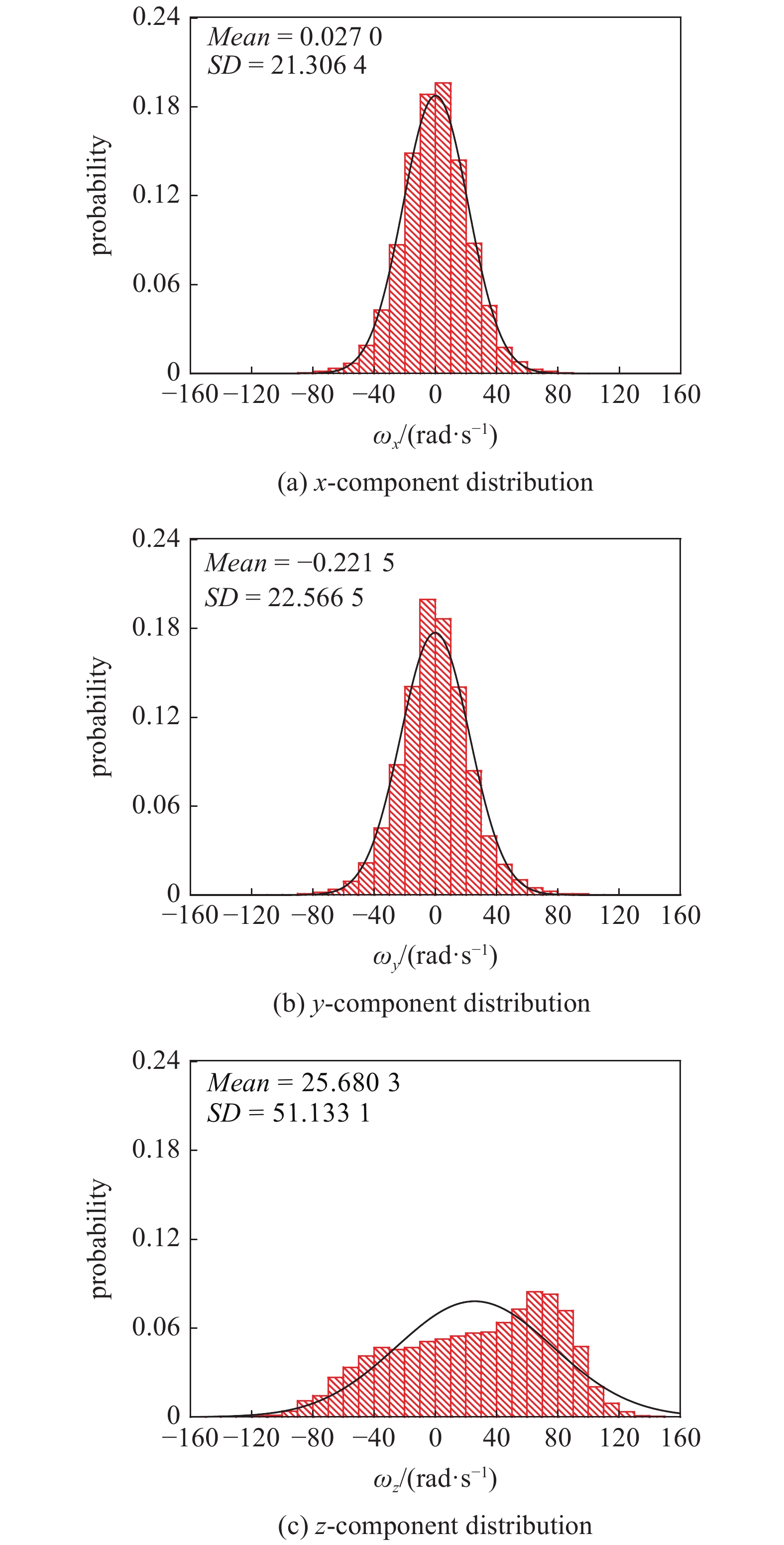
滚筒最低点偏右θ = 30°贴壁网格内颗粒旋转速度分布如图5所示, 其中







 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
近壁颗粒旋转速度分布
Figure
5.
Rotational velocity distribution of near-wall particles
下载: 全尺寸图片
幻灯片
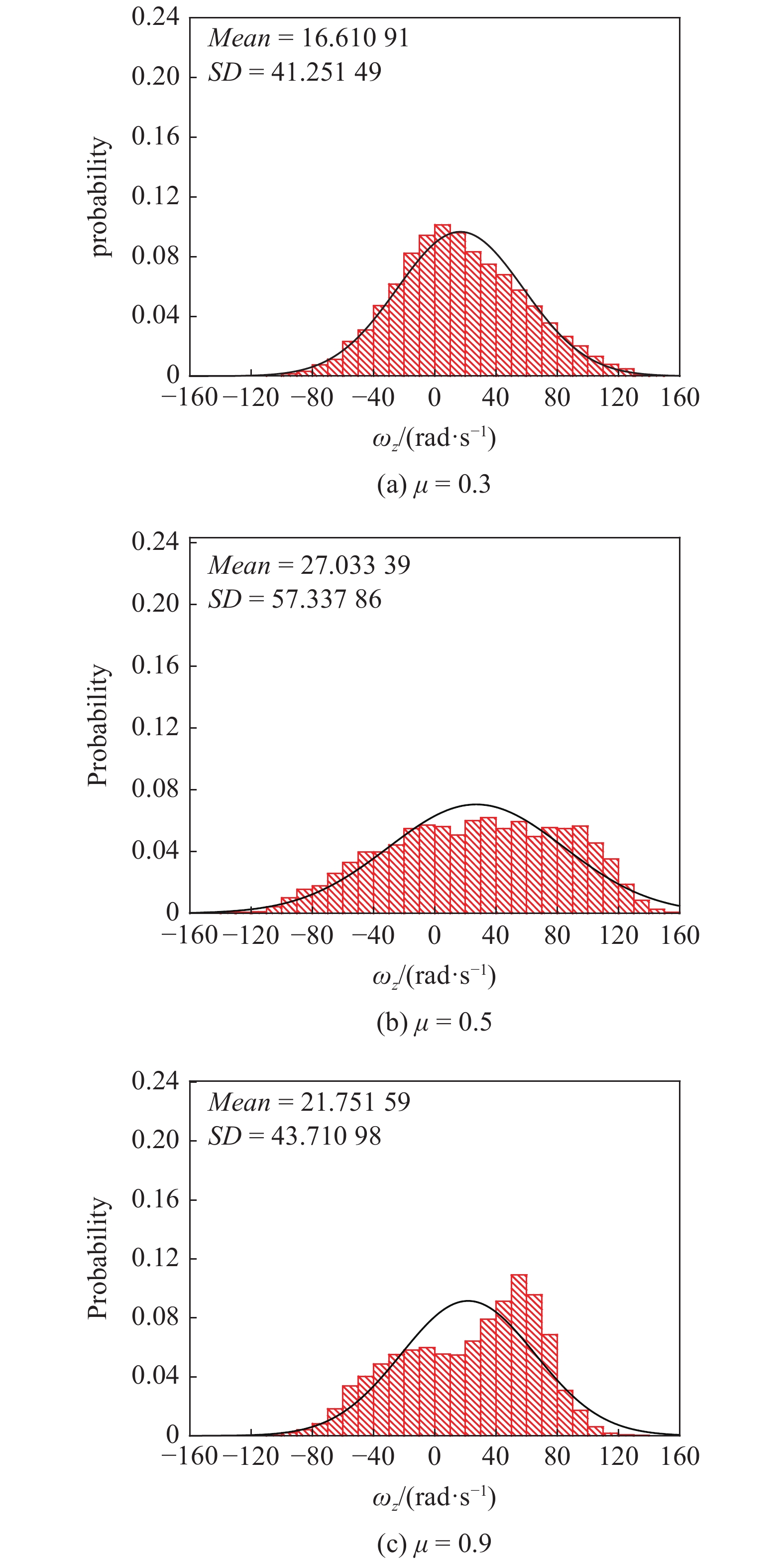
图6为摩擦系数为0.3, 0.5和0.9时, 颗粒轴向旋转速度分布. 结合图5(c),可以发现随着摩擦系数的提高, 颗粒轴向旋转速度


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
不同摩擦系数下的近壁颗粒轴向旋转速度分布
Figure
6.
Axial rotational velocity distribution of near-wall particles under different friction coefficients
下载: 全尺寸图片
幻灯片
表3为不同摩擦系数下的颗粒旋转速度统计分析结果. 从表3中可以看出, 摩擦系数为0.3时, 旋转速度分布的拟合决定系数接近1; 但随着摩擦系数增加, 轴向旋转速度分布的拟合决定系数明显减小, 摩擦系数在0.5, 0.7和0.9时, 拟合决定系数小于0.9, 表明其严重偏离正态分布, 这与图6旋转速度的直观分布是一致的. 同时, 不同摩擦系数下, 轴向旋转速度分布的标准差SD均明显大于其他两个方向, 表现出较强的各向异性. 总的来说, 切向和径向的旋转速度分布仍然较好的满足正态分布, 但轴向的旋转速度分布随着摩擦系数的增加越偏离正态分布. 因此, 与颗粒平动速度分布不同, 在动力学理论中将壁面附近颗粒旋转速度假设为正态分布需谨慎.
表
3
旋转速度分布的标准差和决定系数
Table
3.
Standard deviation and determination coefficient of rotational velocity distribution
table_type2 ">
| μ | 0.3 | 0.5 | 0.7 | 0.9 |
| SDX | 11.90368 | 18.65482 | 21.30643 | 21.80627 |
| SDY | 15.86229 | 22.58676 | 22.56652 | 21.88801 |
| SDZ | 41.25149 | 57.33786 | 51.13313 | 43.71098 |
| R2X | 0.98682 | 0.99291 | 0.99569 | 0.99535 |
| R2Y | 0.99072 | 0.98469 | 0.98589 | 0.98491 |
| R2Z | 0.97712 | 0.87048 | 0.76709 | 0.72841 |
下载: 导出CSV
|显示表格
2.3
无因次旋转温度
在颗粒动力学理论中, 颗粒温度将单个颗粒的微观小尺度脉动行为与大量颗粒所表现的宏观流动性质相关联, 出现在颗粒黏度、压力和扩散系数等参数的本构关系中. 实际颗粒碰撞过程中, 平动能量与旋转能量会相互转化, 因此颗粒平动温度与旋转温度应相互耦合. 颗粒与壁面作用时, 旋转温度的影响是不可忽略的[14], 但常规欧拉双流体模型中并未求解颗粒旋转温度, 为此需建立颗粒旋转温度的代数型封闭关联式. Jenkins和Zhang[33]曾将球形颗粒无因次旋转温度

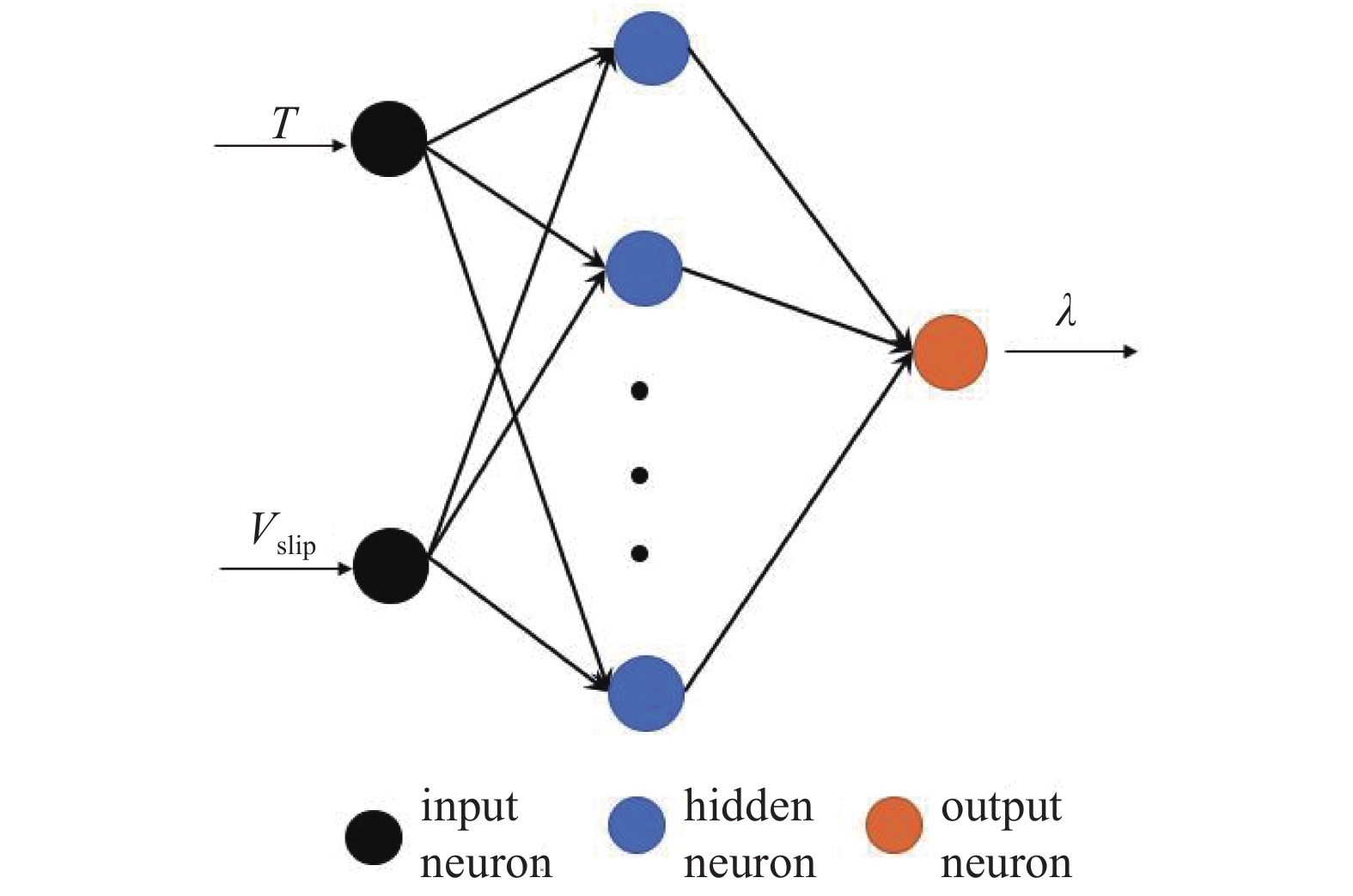
图7为本文采用的BP神经网络结构示意图. BP神经网络是一种多层的前馈神经网络, 其主要的特点是: 信号是前向传播的, 而误差是反向传播的, 传播过程主要分为两个阶段, 第一阶段是信号的前向传播, 从输入层经过隐含层, 最后到达输出层; 第二阶段是误差的反向传播, 从输出层到隐含层, 最后到输入层, 依次调节隐含层到输出层的权重和偏置, 输入层到隐含层的权重和偏置. 每层的神经元节点通过权值与偏置与下一层的节点相连接, 输入信号通过激活函数转换成输出结果, 最后网络输出如下
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
本文使用的神经网络结构
Figure
7.
Structure of neural network used in present work
下载: 全尺寸图片
幻灯片
$${y_p} = fleft( {sumlimits_{q = 1}^Q {{x_{pq}}{w_{pq}} + {b_p}} } ight)$$  | (9) |
式中,









当神经网络输出值与目标值


$$ E = frac{1}{2}{left( {{y_p} - hat y} ight)^2} $$  | (10) |
为了减小误差

本研究输入参数为平动温度




$$ begin{split} & {boldsymbol{lambda} } = {boldsymbol{W} }dfrac{1}{ {1 + { { m{e} }^{ - ({W_x}x + {b_1})} } } } + {b_2} & {boldsymbol{x}} = left[ T ;; {{V_{{text{slip}}}}} ight]&{{boldsymbol{b}}_1}{ m{ = [0}}{ m{.028;820;17,;0}}{ m{.028;820;17,;0}}{ m{.028;820;17, }}&qquad{ m{0}}{ m{.028;820;17,;0}}{ m{.028;820;17,;0}}{ m{.028;820;17, }}&qquad{ m{0}}{ m{.028;820;17,;0}}{ m{.028;820;17]}}&{{{b}}_2}{ m{ = 0}}{ m{.718;393;26}}&{{boldsymbol{W}}_x} = {[{W_1};;{W_2}]^{ m{T}}}&{boldsymbol{W}_1}{ m{ = [ - 0}}{ m{.522;647;14,; - 0}}{ m{.522;647;14,; - 0}}{ m{.522;647;14, }}&qquad{ m{ - 0}}{ m{.522;647;14,; - 0}}{ m{.522;647;14,; - 0}}{ m{.522;647;14, }}&qquad{ m{ - 0}}{ m{.522;647;14,; - 0}}{ m{.522;647;14]}}end{split}$$  |
$$ begin{split} &{boldsymbol{W}_2}{ m{ = [0}}{ m{.087;477;71,;0}}{ m{.087;477;71,;0}}{ m{.087;477;71, }}&qquad{ m{0}}{ m{.087;477;71,;0}}{ m{.087;477;71,;0}}{ m{.087;477;71, }}&qquad{ m{0}}{ m{.087;477;71,;0}}{ m{.087;477;71]}}&boldsymbol{W}{ m{ = [0}}{ m{.613;576;85,; 0}}{ m{.613;576;85,; 0}}{ m{.613;576;85,}}&qquad{ m{0}}{ m{.613;576;85,;0}}{ m{.613;576;85,;0}}{ m{.613;576;85, }}&qquad{ m{0}}{ m{.613;576;85,; 0}}{ m{.613;576;85}}{{ m{]}}^{ m{T}}}end{split}$$  | (12) |
表
4
人工神经网络模型的细节
Table
4.
Details of the artificial neural network model
table_type1 ">
| No. | Particulars | Specifications |
| 1 | network type | BP neural network |
| 2 | activation function | sigmoid and linear |
| 3 | error calculation | MSE |
| 4 | number of input layer unit | 2 |
| 5 | input parameters | T, Vsilp |
| 6 | number of output layer unit | 1 |
| 7 | output parameters | λ |
| 8 | number of hidden layer unit | 8 |
| 9 | learning rate | 0.0002 |
| 10 | training times | 600 |
| 11 | training set size | 2060 |
| 12 | test set size | 560 |
下载: 导出CSV
|显示表格
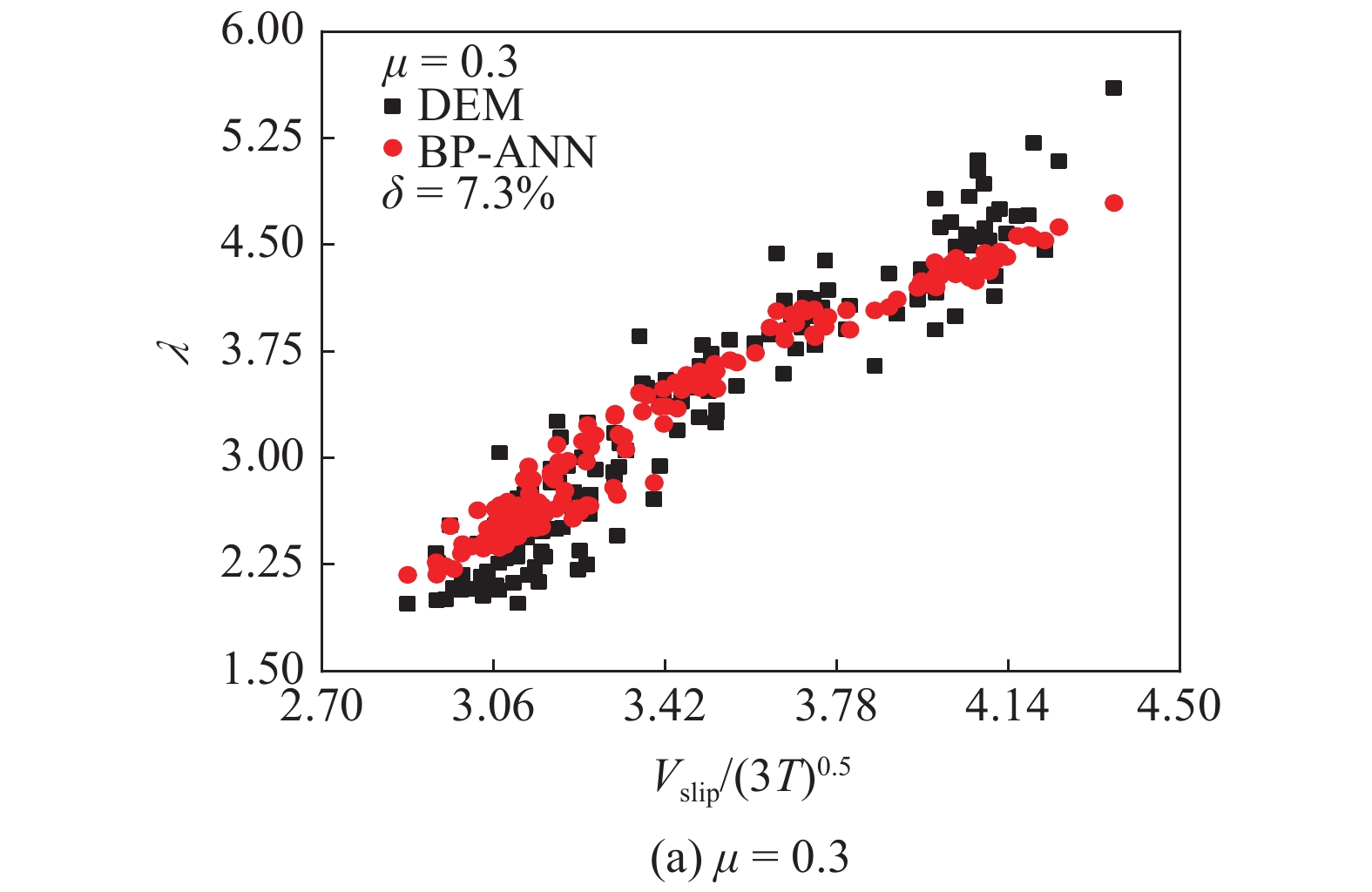
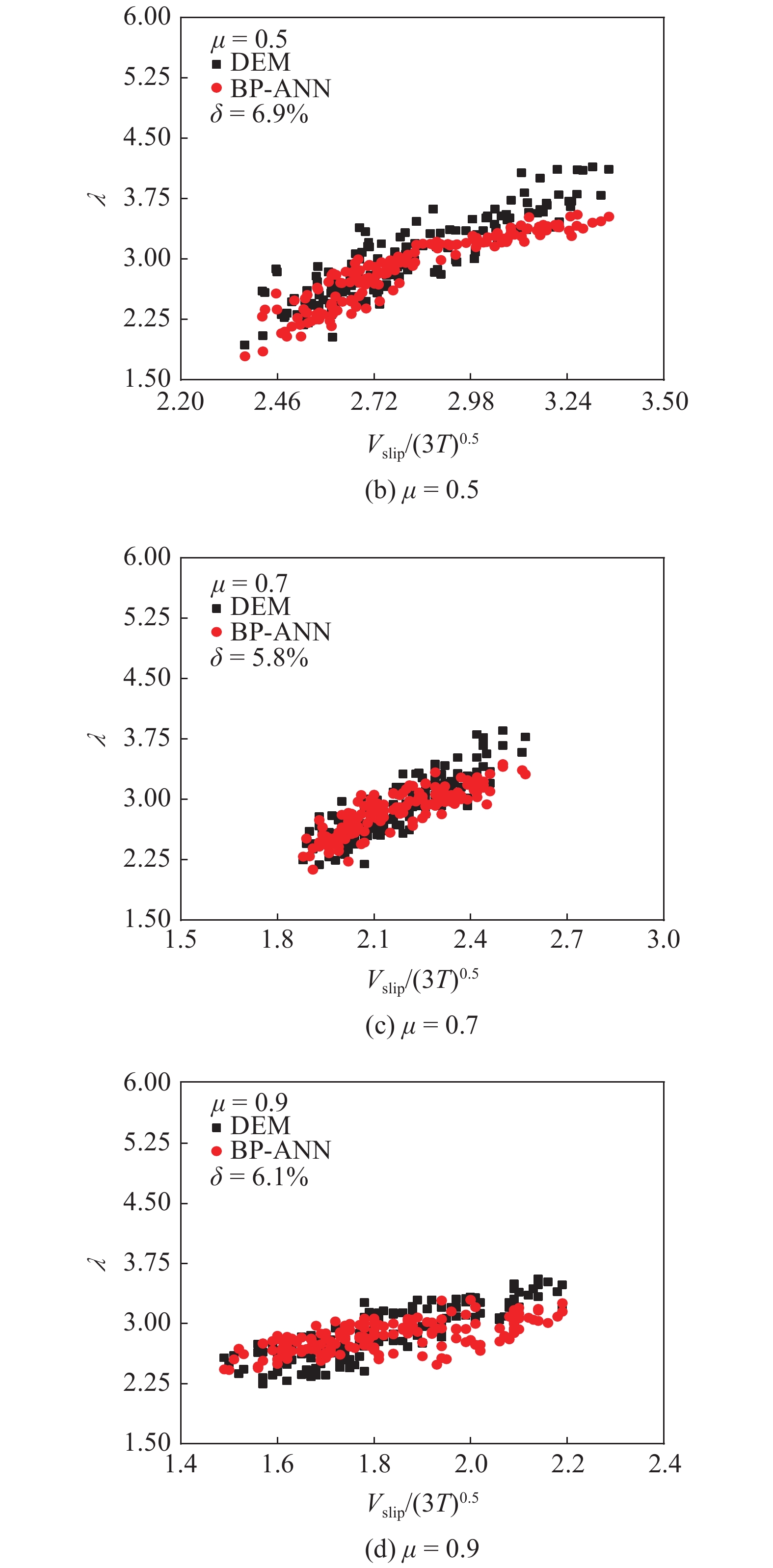
图8为模型预测结果与DEM统计结果的对比, 其中红色圆点为BP神经网络预测的无因次旋转温度λ, 黑色的正方形为DEM模拟结果, δ为统计的平均相对误差. 由图可见, 相同摩擦系数下, 无因次旋转温度随无因次滑移速度增大呈现出增长趋势; 且相同无因次滑移速度下, 随着摩擦系数的增加, 无因次旋转温度也表现为增长趋势. 此外, 即使样本数据点较为离散, BP神经网络预测结果的平均相对误差依然较小, 表明采用神经网络模型建立颗粒旋转温度的代数型封闭关联式是可行的.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-8-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-8-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure8-1" />
8
无因次旋转温度的模型预测与DEM统计结果对比
8.
Comparison of predicted dimensionless rotational temperature with DEM results
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
无因次旋转温度的模型预测与DEM统计结果对比(续)
Figure
8.
Comparison of predicted dimensionless rotational temperature with DEM results (continued)
下载: 全尺寸图片
幻灯片
2.4
壁面处颗粒应力分析
欧拉双流体模型中, 颗粒壁面边界条件主要是通过壁面上颗粒相法向应力来关联切向应力. 因此, 通过DEM模拟并统计分析壁面所受颗粒的切向和法向应力, 可以为双流体模型中颗粒壁面边界条件的构建提供数据参考.
图9给出了不同摩擦系数下, 壁面上切向和法向应力比与颗粒无因次滑移速度之间的关系. 由图可知, 当摩擦系数为0.3和0.5时, 应力比随无因次滑移速度的增加而增大, 并趋近于摩擦系数值; 当摩擦系数增大到0.7和0.9时, 无因次滑移速度的增加到一定程度后不再增加, 应力比出现非单值型分布, 这和图中Louge[17]针对摩擦系数0.75和 ∞ 两种状态下给出的分布趋势是一致的. 本文统计结果和Louge的数据分布规律相同, 但数值上存在差异, 并随摩擦系数增加差异变大, 其原因可能在于Louge的模拟中壁面上镶嵌有半球体, 增大了颗粒与壁面的切向作用.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/10//lxxb2021-313-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
不同摩擦系数下壁面切向与法向应力比
Figure
9.
Wall stress ratio under different friction
下载: 全尺寸图片
幻灯片
Johnson和Jackson壁面边界条件采用简单常数来描述应力比与无因次滑移速度的关系, 这与实际数据是不相符的, 只能作为一定范围内的近似或平均. Zhao等[34]对近壁颗粒平动和旋转速度采用各向同性的正态分布, 推导了应力比与滑移速度理论公式, 对比Johnson和Jackson壁面边界条件即可将光滑因子表示如下[15]
$$begin{split}phi = &mu frac{{1 + e}}{2}cot varPhi cdot hfill &left[ {frac{1}{{left( {lambda + 1} ight){{cot }^2}varPhi + 1}} + frac{{arctan left( {sqrt {lambda + 1} cot varPhi } ight)}}{{sqrt {lambda + 1} cot varPhi }}} ight]end{split}$$  | (11) |
其中,
ight)} / {left[ {7mu left( {1 + e}
ight)}
ight]}} $

将神经网络模型预测的无因次旋转温度代入上述光滑因子, 再结合Johnson和Jackson壁面边界条件, 可以计算出壁面上应力比如图9中实线所示. 当摩擦系数为0.3时, 由表2和表3可知颗粒速度分布的确较好的符合正态分布, 因此公式预测结果与DEM统计结果相吻合; 但当摩擦系数提高后, 由于颗粒旋转速度偏离正态分布, 公式预测和DEM统计结果偏差增加.
3.
结 论
采用DEM方法数值模拟了滚筒内颗粒流动状况. 通过统计和ANN算法研究了壁面附近微观颗粒的运动特征, 得出了以下结论.
(1) 颗粒平动速度都基本符合正态分布, 小摩擦系数下颗粒旋转速度也满足正态分布, 但随着摩擦系数的提高, 壁面剪切产生的轴向旋转速度分布偏离正态分布; 同时颗粒平动和旋转速度脉动呈现较强的各向异性.
(2) 无因次旋转温度和无因次滑移速度存在一定的正相关, 并受摩擦系数的影响. 将滑移速度和颗粒平动温度作为输入, 采用人工神经网络构建颗粒旋转温度模型, 可以为常规欧拉双流体模型框架下考虑颗粒旋转温度提供代数型封闭.
(3) 壁面与颗粒作用的切向与法向应力比, 受无因次滑移速度和摩擦系数的影响, 摩擦系数增大后, 其理论关系的建立需要考虑更真实的颗粒速度分布, 如非正态分布、各向异性.
