软体机器人的概念区别于传统的刚体机器人,设计方法的灵感往往来自于自然界,如模仿蠕虫、海星和蛇等的软体机器人[4-6]。针对具有软体特性的机器人,随着基于新型材料的应用和机器人机构形态的研究[7],机械智能将使其具有自适应能力[8-9],也逐步形成了2种技术发展途径:第1种是研制完全由软材料构建出的软体机器人,模仿对象往往是结构简单的生物体[10-12],没有内部骨骼,结构简单,加工成本一般相对刚体机器人也更低,能完成一些刚体机器人不擅长完成的复杂动作,但是其低刚性、低负载能力的特性也限制了它的功能性;第2种是研究具有部分软体材料的半软体机器人,其设计思想是采用柔软材料和支撑材料相融合的整体结构[13],降低了结构的复杂性。此外,部分新型软体机器人的设计理念更趋近于生物启发[14],但是目前还处于初步探索阶段,仍存在着诸多技术难题。
近年,3D打印制造技术的发展给仿生模块的设计注入了新活力[15]。3D打印的柔软腿可由多个独立控制的连续模块单元组成,并且可实现多种不同材料的无缝融合[16]。
基于上述分析,本文构建了一款柔软、简洁和智能的软体机器人,使其既有软体结构的应变能力,又有较强的驱动负载能力,既保证了部分关节的刚性,又提升了机器人的整体性能,同时还具有结构设计和控制方案上的简洁性。采用3D打印等新型制造技术为机器人研制柔软温和的外体,通过耦合多组新型驱动器与多组柔性和刚性关节,组成具有适应性和灵巧性的新型机器人。
1 软体机器人设计原则和驱动原理 1.1 柔软躯干和四肢的总体设计方案 该半软体爬行机器人的三维模型如图 1所示,其主要由两部分组成:躯干部分包括前后硬质壳体、中间弹簧及硅胶壳体;四肢(腿)分别装配在前后壳体的下部,与躯干的收缩运动配合,4组硅胶软足加装在四肢的底部,以提供足够的摩擦力实现运动。
 |
| 图 1 半软体爬行机器人的三维示意图 Fig. 1 Three-dimensional schematic of semi-soft crawling robot |
| 图选项 |
该半软体爬行机器人躯干部的柔软关节采用形状记忆合金(Shape Memory Alloy,SMA)[17-19]作为驱动,同时使用自反馈和超弹性形状记忆合金(Superelastic Shape Memory Alloy,SSMA)[20]构建外传感单元。柔软关节的机构设计基于驱动器的原理,可实现弯曲,其驱动器布局如图 2所示。该机构包含一个高刚度弹簧把前后壳体连接起来,弹簧和壳体支撑起机器人的躯干外形轮廓。2组SMA驱动丝穿过弹簧和壳体,固定在4根装配在壳体内侧的滚轴上,SMA驱动丝分别与1组小弹簧及挡块串联,以实现疲劳性能的优化及保证适当的预应力。与此同时,2根SSMA驱动丝与SMA驱动丝并联分布,可提供SMA驱动丝形变的准确外部反馈。该躯干关节可获得2组弯曲自由度,即偏转和俯仰。2组驱动丝同时加热将导致躯干向地面方向弯曲;2组驱动丝的形变量不一致将导致躯干向左右两侧摆动。在该躯干关节中,硬壳体、滚轴和挡块都采用高强度工程塑料聚醚醚酮(PEEK)加工而成,以保证驱动元件间的绝缘并提供足够的机构强度。置于前后硬壳体中间的3D打印硅胶软壳被覆盖在高刚度弹簧以及驱动传感丝的外侧,用于保护内置的驱动传感器,同时配合运动的开展。
 |
| 图 2 机器人躯干外形及内部传感器布局 Fig. 2 Layout of trunk shape and internal sensor of robot |
| 图选项 |
受限于关节的最大转角和SMA的响应频率(材料性能决定),该半软体爬行机器人的运动速度将会非常慢。为了解决这个问题,在机器人整体设计上,本文在躯干下部加入了4组腿。通过躯干柔性关节的弯曲,结合这4组腿的旋转运动可极大提高每一次收缩运动的行程,进而提高运动速度。每组腿都通过2根SMA驱动丝与弹簧结合实现双向旋转,在腿部驱动系统中,由于内应力情况比较简单,SMA自反馈就足以满足闭环控制的需求。在每组腿的底部都装配一个由3D打印的硅胶制作的非对称足,它们将根据腿与地面姿态的不同提供不同的摩擦阻力以实现运动,如图 3所示。
 |
| 图 3 3D打印足 Fig. 3 3D printing of foot |
| 图选项 |
1.2 柔软关节的设计原则 为了实现柔软关节的2个自由度,关键是通过SMA驱动丝实现该关节的弯曲运动。其中,1组高刚度的弹簧将作为对抗SMA驱动丝的弯曲对抗单元,SMA驱动丝组与其呈并联布局:柔软关节的俯仰自由度通过SMA-弹簧的对抗设置实现,该动作主要是配合机器人的前进和后退,SMA驱动丝提供连续的驱动力;柔软关节的摆动通过2组SMA驱动丝的对抗来实现,2组驱动丝分别根据转角的需求提供反向的力矩。本文选用SMA驱动丝构建驱动单元,以获得更大的轴向应力、更稳定的性能和自反馈的能力及更快的冷却速度。
在前进和后退运动过程中,2条前腿协同工作,根据姿态需求摆向相同的方向,后腿也协同转出对应的转角;在转向过程中,左边的2条腿与右边2条腿在进给方向差速行进。为了保证机器人的有效移动,腿下部装配有高摩擦系数的足底单元,在前向运动时,足部与地面的接触面积增大会增加向后方的摩擦力,推动前进,而后向运动时形变恰好相反。
2 基于几何模型的参数分析 2.1 动力学分析 俯仰运动可以分解为以下4个步骤。
2.1.1 初始姿态 在初始姿态时,驱动丝没有加热,但是装配阶段施加的弹簧预紧力使得所有的驱动丝都处于绷紧状态,如图 4所示,前后硬质壳体的中心都位于前后腿之间。图中:α为躯干对水平方向的转角;m1为躯干的质量;g为重力加速度;L1为躯干质心到腿部支撑点的水平距离;F为中央弹簧提供的拉力;L2为壳体质心中点到壳体右侧边缘的水平距离;h1为弹簧和合金丝与壳体连接着力点到壳体下沿的距离;u为弹簧作用点到腿部支撑点的水平方向角度;f为左侧2只腿提供的摩擦力。
 |
| 图 4 初始姿态的动力学分析 Fig. 4 Dynamic analysis of initial attitude |
| 图选项 |
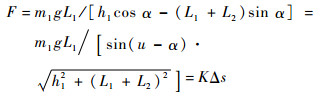
以躯干的左半边为例,躯干对水平方向的转角为α,躯干重力矩M1为
 | (1) |
由于在初始阶段,合金丝处于低温态,仅能提供极为有限的力输出,因此其力矩可以忽略不计。同时,合金丝和中央弹簧提供的力矩M2为
 | (2) |
基于力矩平衡原则,M1=M2,因此可得到
 | (3) |
式中:K为中央弹簧的弹性模量;Δs为中央弹簧的压缩距离;u为16.7°。
图 4所示姿态的左侧2只腿提供的摩擦力f应与弹簧提供的拉力F大致相当,因此要求腿部(足)可以提供的最大摩擦力fmax远大于该拉力F。此外,该机器人右侧与左侧的力学情况在初始完全对称。
通过式(3),可得出初始阶段的躯干转角α为
 | (4) |
基于式(4),随着K和h1的增大,初始向地面内凹的角度越小。在实际测量中,我们选择了高刚度的弹簧,可认为机器人躯干的初始姿态时,躯干与地面水平,在此情况下,由于摩擦力不大,四肢也与地面呈垂直支撑。
2.1.2 加热初始姿态 为了实现爬行机器人前进后退的运动,躯干内的SMA驱动丝被加热收缩,具体的内应力情况如图 5所示。
 |
| 图 5 SMA驱动丝加热后的初始力学分析 Fig. 5 Initial mechanical analysis of SMA when heated |
| 图选项 |
根据图 5,每根合金丝都同时有2对内应力,即Fs1和Fs2,Fs3和Fs4,力沿合金丝方向传递,因此大小相等,即|Fs1|=|Fs2|=|Fs3|=|Fs4|=|Fs|。Fs2和Fs3的合力为Fsc1,Fs3和Fs4的合力为Fsc2,Fsc1和Fsc2是一对大小相等、方向相反的力。因此,SMA驱动丝对躯干的作用力可简化在三点上,如图 6所示。
 |
| 图 6 SMA驱动丝驱动力 Fig. 6 Driving force of SMA |
| 图选项 |
基于以上分析,躯干传递到柔软关节的力矩M3为
 | (5) |
式中:L3为Fs1到腿部支撑点的垂直距离,为16.5 mm;L4为力Fsc1和力Fsc2到腿部支撑点的垂直距离差值,为9.37 mm。
力Fsc1和Fsc2的合力可表达为
 | (6) |
式中:θ为合金丝中段与躯干上沿的夹角。
在初始姿态时,腿部两侧的SMA驱动丝同时轻微加热,保证腿部关节处于绷紧状态,在关节旋转过程中,左右侧丝轮流作为驱动丝和阻力丝存在,收缩侧(驱动)的力臂随收缩变长,拉伸侧(阻力)的力臂随之变短,因此转角越大,转动相对越容易。
2.1.3 躯干加热收缩过程 加热驱动过程中,受SMA驱动丝的收缩力,中央弹簧会外凸拱起,同时为了配合身体的移动,运动方向前侧的双足会向运动方向旋转并产生更大的对地摩擦力。建立处于运动方向(左侧)的躯干和腿部的力平衡方程:
 | (7) |
式中:Fz1为足部对地面的压力;α1为躯干与水平面的夹角;F1s1为左侧弹簧提供拉力;F1为左侧合金丝内应力。
水平方向的力平衡方程如下:
 | (8) |
式中:f1为地面摩擦力。
由于左侧足底部的摩擦力f1受到摩擦系数μ1的影响,可表示为
 | (9) |
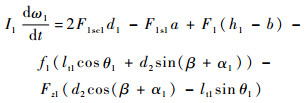
结合式(6)可获得左边躯干的平衡力矩为
 | (10) |
式中:I1为壳体的转动惯量;d1为中心点到力F1sc1的垂直长度;a为中心点到力F1s1的垂直长度;b为中心点到躯体下沿的垂直距离;d2为中心点到腿支点的距离;lt1为腿的长度;β为中心点与腿支点连线与躯体下沿的夹角;θ1为足部与地面的夹角;ω1为左侧躯干转动角速度。
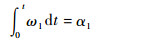
对角加速度求2次积分可获得壳体的转角α1为
 | (11) |
通过以上分析,建立处于运动后方(右侧)的躯干和腿部的力平衡方程,可获得右边躯干的平衡力矩I2和转角α2。
2.1.4 躯干冷却放平过程 在躯干的驱动丝冷却过程中,SMA驱动丝的收缩力减小,中央弹簧试图恢复原状,同时为了配合身体的移动,运动方向后侧的双足会向运动反方向旋转并产生更大的对地摩擦力,运动方向的双足侧回到与躯干垂直的角度以减小对地摩擦力。
垂直方向和水平方向的力平衡方程与式(7)和式(8)相同。但由于腿部的转角变化,需要考虑两侧足底摩擦系数的改变,即摩擦力f1要受摩擦系数μ′1的影响。
左侧躯干的平衡力矩与壳体转角公式与式(10)和式(11)相同。进一步分析,建立处于运动后方(右侧)的躯干和腿部的力平衡方程,方法相同。此时只需要考虑摩擦力f2的摩擦系数要受μ′2的影响。
下文将基于机构学分析得出前后躯干的理论目标转角α1、α2,以及前后腿部的理论目标转角θ1、θ2。摩擦力系数μ1、μ2、μ′1、μ′2可通过试验测得。最终根据计算结果决定驱动器的关键设计参数。
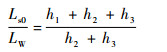
2.2 运动学分析 基于目前柔软关节的设计,在驱动过程中,由于中央躯干弹簧的压缩模量远高于抗弯模量,因此假设在SMA加热收缩时,弹簧不被压缩,沿弹簧中心轴两侧的距离Ls0保持不变。因此,SMA驱动丝中间段的长度LW可表示为
 | (12) |
式中:h1、h2、h3和Ls0的值见表 1。
表 1 躯干和腿部参数 Table 1 Parameters of trunk and legs
| 机构参数 | h1 | h2 | h3 | h4 | Ls0 |
| 数值/mm | 20 | 8 | 8 | 30 | 64 |
表选项
躯干关节转角α可表示为
 | (13) |
结合式(12)和式(13),可得到SMA驱动丝的驱动距离与躯干关节转角的关系为
 | (14) |
当Ls0-LW的值等于SMA驱动丝的收缩距离时,式(14)可以简化为
 | (15) |
式中:SW为SMA驱动丝的收缩距离。
SMA驱动丝的最大收缩距离为初始长度S0的3.8%,参考表 1的值,可算得最大俯仰角度为47°。
考虑到腿部单元之间的拓扑关系,腿长设置为40 mm,两侧分别连接1根30 mm长的SMA驱动丝,旋转轴直径约为8 mm。依次加热2根SMA驱动丝,驱动器产生对抗性的应力,驱动腿部在+21°~-21°间来回摆动。
根据以上分析描述的运动模型,可得到收缩后的SMA驱动丝的长度为
 | (16) |
式中:h4为合金丝长度。h3和h4的值见表 1。
腿部关节转角θ为
 | (17) |
该半软体爬行机器人的躯干长度为216 mm,基于以上参数,结合式(15)和式(17)以及表 1中的数据,可得到理论上单次运动的直线最大距离为42 mm。
3 仿真 根据第2.1节所建立的动力学模型,进一步建立各关节的运动学模型。躯干关节转角α1和α2变化如下:
 | (18) |
 | (19) |
腿部关节转角θ1和θ2变化如下:
 | (20) |
 | (21) |
根据方程式(18)~式(21)得到躯干的关节转角仿真曲线,如图 7所示。
 |
| 图 7 躯干关节转角运动规划仿真 Fig. 7 Simulation of trunk joint angle motion planning |
| 图选项 |
根据图 7分析,本文设计的半软体爬行机器人的左右两侧躯干的转角基本相同,符合设计要求。
同理可得到腿部的关节转角曲线,如图 8所示。根据图 8对比分析,本文设计的半软体爬行机器人腿部关节的转角符合前进的运动规律,符合设计要求。
 |
| 图 8 腿部关节转角运动规划仿真 Fig. 8 Simulation of leg joint angle motion planning |
| 图选项 |
4 试验 基于运动学分析,软体机器人的运动可分解为躯干和腿部各自的关节转角,这些转角值再分解为各组驱动丝的目标形变量。由于躯干和腿部的驱动原理以及传感系统都存在差异,因此二者的控制模型有所不同。
为了构建腿部的闭环控制模型,用SMA的自反馈作为主要的反馈参数。为了建立自反馈的控制模型,用一个激光位移传感器检测腿部的实际转角,基于该转角可获得驱动丝的形变量。在检测得到转角和驱动丝的电阻值后,基于径向基函数(RBF)神经网络[21-22]用于训练电阻-位移的拟合曲线,以建立插值函数。在控制模型建立后,可通过电阻反馈获得腿部姿态的预估值,将预估值与目标值的差值传递给控制器后,生成SMA驱动器的加热占空比以实现目标转角。
躯干的控制与腿部的控制存在一些差异,主要是由于柔性关节在缺乏刚性约束的情况下,驱动器的内应力更加复杂,因此加入了2组SSMA驱动丝与SSA驱动丝并联作为传感器单元。RBF神经网络被用于训练产生SMA驱动丝和SSMA驱动丝的反馈模型,通过基于支持度[23-24]的函数对2类反馈进行融合。最终的融合模型被用于躯干的闭环控制中。
本文采用3D打印技术制备了机器人足部的模具,当沿足部的弯曲方向施加压力时,足部与地面的接触面积增大,摩擦系数增大,而向足部的逆方向施加压力时,足部与地面的接触面积减小,摩擦系数减小。
根据动力学分析的结论,本文选择0.381 mm的SMA驱动丝和0.1 mm的SSMA传感丝构建驱动传感单元,同时加入弹簧以提升驱动器的整体性能。由于驱动丝和传感丝的形变信息无法获取,本文选择Baumer CH-8501 Frauenfeld型激光传感器固定在机器人的前部躯干外壳上,在其对应的后部躯干壳体靠弹簧侧固定了一个测试标定的靶标,在运动过程中检测该位移传感器反馈的距离信息,如图 9所示。该激光传感器有效距离为25~300 mm,重复定位精度为0.1 mm,适合本文机器人尺寸的需求。
 |
| 图 9 机器人实体 Fig. 9 Robot entity |
| 图选项 |
本文中,作为试验条件,SMA驱动丝加热电流为1.1 A,最大占空比接近85%。为了实现SMA驱动丝的冷却完全,以提高控制精度,每一次运动的频率接近0.08 Hz,实际的运动情况如图 10所示。
 |
| 图 10 前进运动图 Fig. 10 Schematic of forward motion |
| 图选项 |
通过对图 10的分析可得,该半软体爬行机器人的运动速度接近4 mm/s,根据图中标定的软尺,可以得到该机器人每一次的移动距离在35~45 mm之间的结论。试验结果验证了机器人设计的合理性。
5 结论 1)搭建了一款基于智能驱动器的半软体爬行机器人,柔软关节由弹簧和SMA驱动器组成,四肢由2组SMA驱动丝组成,可以实现双向旋转,柔软关节的俯仰动作配合腿关节的旋转可实现机器人较高效率的运动。
2)建立了机器人各关节的动力学模型和运动学模型,确定了机器人机构设计的关键参数及驱动器设计的关键参数。
3)选用高强度工程塑料PEEK和3D打印技术对机器人进行了构建,并进行了前进运动试验,验证了理论模型的正确性。
参考文献
| [1] | TRIVEDI D, RAHN C D, KIER W M, et al. Soft robotics:Biological inspiration, state of the art, and future research[J].Applied Bionics and Biomechanics, 2008, 5(3): 99–117.DOI:10.1155/2008/520417 |
| [2] | KIM S, LASCHI C, TRIMMER B. Soft robotics:A bioinspired evolution in robotics[J].Trends in Biotechnology, 2013, 31(5): 23–30. |
| [3] | SRINIVASAN M, RUINA A. Computer optimization of a minimal biped model discovers walking and running[J].Nature, 2006, 439(7072): 72–75.DOI:10.1038/nature04113 |
| [4] | MARVI H, GONG C H, GRAVISH N, et al. Sidewinding with minimal slip:Snake and robot ascent of sandy slopes[J].Science, 2014, 346(6206): 224–229.DOI:10.1126/science.1255718 |
| [5] | BAISCH A T, SREETHARAN P S, WOOD R J.Biologically-inspired locomotion of a 2g hexapod robot[C]//Proceedings of IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2010:5360-5365. |
| [6] | ELPHICK M R, MELARANGE R. Neural control of muscle relaxation in echinoderms[J].Journal of Experimental Biology, 2001, 204(5): 875–885. |
| [7] | OBEROI H, DRAPER A, THOMPSON P.Production implementation of a multi spindle flexible drilling system for circumferential splice drilling applications on the 777 airplane[C]//SAE 2009 Aerospace Technology Conference and Exposition.Warrendale, PA:SAE Press, 2009:257-262. |
| [8] | SHEPHERD R F, STOKES A A, NUNES R, et al. Soft machines that are resistant to puncture and that self seal[J].Advanced Materials, 2013, 25(46): 6709–6713.DOI:10.1002/adma.v25.46 |
| [9] | WRIGHT C, BUCHAN A, BROWN B, et al.Design and architecture of the unified modular snake robot[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2012:4347-4354. |
| [10] | SEOK S, ONAL C D, WOOD R, et al.Peristaltic locomotion with antagonistic actuators in soft robotics[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2010:1228-1233. |
| [11] | LASCHI C, CIANCHETTI M, MAZZOLAI B, et al. Soft robot arm inspired by the octopus[J].Advanced Robotics, 2012, 26(7): 709–727.DOI:10.1163/156855312X626343 |
| [12] | UMEDACHI T, TRIMMER B A.Design of a 3D-printed soft robot with posture and steering control[C]//Proceedings of IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2014:2874-2879. |
| [13] | MORIN S A, SHEPHERD R F, KWOK S W, et al. Camouflage and display for soft machines[J].Science, 2012, 337(6096): 828–832.DOI:10.1126/science.1222149 |
| [14] | LI C, ZHANG T N, GOLDMAN D I. A terradynamics of legged locomotion on granular media[J].Science, 2013, 339(6126): 1408–1412.DOI:10.1126/science.1229163 |
| [15] | CHAN V, PARK K, COLLENS M B, et al. Development of miniaturized walking biological machines[J].Scientific Reports, 2012, 2(7424): 328–329. |
| [16] | UMEDACHI T, VIKAS V, TRIMMER B A.Highly deformable 3-D printed soft robot generating inching and crawling locomotions with variable friction legs[C]//Proceedings of IEEE/RSJ 2013 International Conference on Intelligent Robots and Systems.Piscataway, NJ:IEEE Press, 2013:4590-4595. |
| [17] | QIN C J, MA P S, YAO Q. A prototype micro-wheeled-robot using SMA actuator[J].Sensors and Actuators A-Physical, 2004, 113(1): 94–99.DOI:10.1016/j.sna.2004.01.017 |
| [18] | ASUA E, FEUTCHWANGER J, GARCIA-ARRIBAS A, et al. Sensorless control of SMA-based actuators using neural networks[J].Journal of Intelligent Material Systems and Structures, 2010, 21(18): 1809–1818.DOI:10.1177/1045389X10388965 |
| [19] | KOHL M, JUST E, PFLEGING W, et al. SMA microgripper with integrated antagonism[J].Sensors and Actuators A-Physical, 2000, 83(1-3): 208–213.DOI:10.1016/S0924-4247(99)00385-4 |
| [20] | 崔迪, 李宏男, 宋钢兵. NiTi形状记忆合金电阻特性研究[J].建筑材料学报, 2008, 11(5): 567–573.CUI D, LI H N, SONG G B. NiTi shape memory alloy resistance characteristic study[J].Journal of Building Materials, 2008, 11(5): 567–573.(in Chinese) |
| [21] | SAHA A, CHRISTIAN J, TANG D S, et al.Oriented non-radial basis functions for image coding and analysis[C]//Proceedings of IEEE 1990 International Conference on Advances in Neural Information Processing Systems.Piscataway, NJ:IEEE Press, 1990:728-734. |
| [22] | POZNYAK A S, SANCHEZ E N, YU W. Differential neural networks for robust nonlinear control:Identification, state estimation and trajectory tracking[J].International Journal of Adaptive Control and Signal Processing, 2004, 18(3): 315–316.DOI:10.1002/(ISSN)1099-1115 |
| [23] | 王婷杰, 施惠昌. 一种基于模糊理论的一致性数据融合方法[J].传感器技术, 1999, 18(6): 50–53.WANG T J, SHI H C. A kind of the consistency of the data fusion method based on fuzzy theory[J].Journal of Transducer Technology, 1999, 18(6): 50–53.(in Chinese) |
| [24] | 罗中良, 高潮, 王方连, 等. 不确定信息的数字滤波器设计及应用[J].传感器技术, 2002, 21(5): 24–26.LUO Z L, GAO C, WANG F L, et al. The digital filter design and application of uncertain information[J].Journal of Transducer Technology, 2002, 21(5): 24–26.(in Chinese) |
