但是光伏电池的能源密度比汽油等能源低许多,限制了太阳能飞机的设计空间。于是考虑到能源短缺问题,太阳能飞机的设计和传统飞机不同,太阳能飞机的翼载荷和飞行功率较小。因此太阳能飞机的结构密度,能量采集和传递效率,能源的储存和管理[8],推进系统以及飞机构型需要进行详细设计进而达到能源循环的要求,以期实现长航时飞行[9]。
现有的太阳能飞机构型中,常规构型太阳能飞机占多数。对于非常规构型的太阳能飞机研究较少,例如鸭式构型的SolairⅠ号[10]、飞翼构型的太阳神号[11],以及“Z”型构型。其中“Z”型构型可以是美国秃鹰计划候选机型的构型,采用多机身尾翼配平[9],也可以是飞翼构型[12]。上述太阳能飞机都采用舵面偏转配平。考虑到太阳能飞机翼载荷较轻,结合新构型结构设计的可行性,提出“T”构型太阳能飞机。其原理是在巡航状态下采用降低重心的自配平方法,减少了气动配平损失。然后建立太阳能飞机数学模型,研究适合该构型的优化设计方法,分析其巡航状态的配平原理和静稳定性,并与常规构型太阳能飞机进行对比,分析该构型的应用效果,以及定量分析不同配平迎角下对应的操纵量。结果表明,“T”构型太阳能飞机具有较好的纵向静稳定性,降低了单位面积平飞需用功率,减少了舵面偏转配平带来的配平损失。
1 “T”构型的提出 1.1 现有太阳能飞机构型 为了实现长航时,获取更多的太阳能和减少飞行能耗,成为现有太阳能飞机构型设计研究的重点。波音提出了一种非常规构型的太阳能飞机“太阳鹰”,采用的是多机身布局[13]。每个机身上安装的主动光伏组件可根据太阳辐射角情况绕机身轴线转动来获得更多的太阳能。但是这种方式会带来阻力和结构质量的代价。而飞翼构型的太阳能飞机增大了飞机的面积,减轻了结构质量,在此基础上文献[12]提出的折叠机翼设计可获得更多的太阳能。但是舵面配平时力臂减小,则需要的舵面升力增加,造成全机升力减小。放宽静稳定性对低速太阳能飞机控制系统也有要求。对于具有纵向静稳定性的飞机,其需要舵面偏转操纵产生配平所需的升力,而且这部分升力与迎角产生升力方向相反,造成全机升力损失一部分,如图 1所示。而太阳能飞机飞行速度较低,并且不追求高机动性,具有静稳定性是有意义的。现有的太阳能飞机大多采用的是舵面偏转配平。上述舵面偏转配平方式,对于具有静稳定性的太阳能飞机而言,伴随着气动配平损失带来的飞行能耗。
 |
| V—飞行速度;α—迎角;xb, zb—机体轴;Ocg—飞机的重心;Oac—飞机的气动焦点;L(α)—升力;L(δe)—升降舵配平升力;δe—操纵量。 图 1 常规构型定直飞行时升力情况 Fig. 1 Lift of conventional configuration in direct flight |
| 图选项 |
1.2 “T”构型的配平原理 针对具有静稳定性太阳能飞机的气动配平损失带来的持续能耗的问题,提出了一种“T”构型布局方式,如图 2所示。机翼采用正弯度翼型,在机翼中段后缘处布置了操纵舵面。其下方有一个垂直的支撑面,一端连接机翼,另一端连接机身。由于太阳能飞机翼载荷较低,对T构型结构设计有利。机身可以放置蓄电池和负载。太阳能飞机的动力装置布置于机身前端和机翼前缘处。太阳能电池布置在机翼上表面。
 |
| 图 2 “T”构型示意图 Fig. 2 Sketch map of "T" configuration |
| 图选项 |
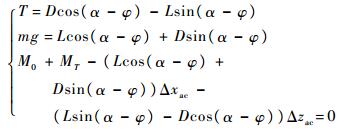
分析飞机的纵向受力情况,如图 3所示,并建立飞机纵向的平衡方程。图中:来流速度与机翼平均气动弦夹角为α,平均气动弦相对机体轴的安装角为φ。在纵向对称面内,飞机受到升力L、阻力D、推力T、重力mg(m为飞机质量,g为重力加速度)以及正弯度翼型零升俯仰力矩M0。
 |
| 图 3 “T”构型飞机定直飞行时受力情况 Fig. 3 Force conditions of "T" configuration in direct flight |
| 图选项 |
飞机在不同飞行迎角下定直飞行的平衡方程为
 | (1) |
式中:Δzac为焦点与重心距离沿垂直支撑面方向的投影;Δxac为焦点与重心距离沿机体轴方向的投影;MT为推力对重心的力矩。飞机在不同飞行迎角下定直飞行时,气动力是α和δe的函数,因此全机俯仰力矩特性不仅和迎角、重心位置有关,还和操纵量有关。
以机体坐标系为参照,飞机巡航飞行时,α=φ,给出飞机巡航飞行时的平衡方程:
 | (2) |
可以看出当飞机巡航飞行时,截面为正弯度翼型的机翼产生的低头力矩和机翼气动力产生的抬头力矩平衡时,飞机实现自配平。这种配平方式利用大面积机翼产生的气动力,提供抬头力矩,在巡航状态下采用降低重心的自配平方法,减少了气动配平损失。
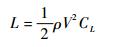
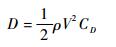
2 “T”构型参数设计的数学模型 2.1 能量平衡模型 太阳能飞机飞行时,升力系数为CL,阻力系数为CD,大气密度为ρ,机翼面积为S。全机升力可以表示为
 | (3) |
全机阻力可以表示为
 | (4) |
由于升力等于重力,结合式(3),可得
 | (5) |
由于推力等于阻力,结合式(4)和式(5)可得推进系统平飞需用功率与机翼面积比为
 | (6) |
式中:Pp为推进系统平飞需用功率;CD/CL3/2为功率因子。
太阳能飞机用电设备包括推进装置和机载设备,飞机平飞需用总功率为
 | (7) |
式中:ηplr为螺旋桨功率;ηmot为电机功率;Peq为机载设备功率。
太阳能飞机的能源动力系统通过太阳能电池板获取太阳能,传递、存储,最后转化为自身飞行所需的动力。在这个过程中必然伴随着能量损失。能源动力系统及能源利用率如图 4[14]所示,MPPT为最大功率跟踪点。
 |
| 图 4 能源动力系统及能源利用率[14] Fig. 4 Energy power system and energy utilization efficiency[14] |
| 图选项 |
太阳能飞机通过光伏电池将太阳能转化为电能,太阳能电池输出功率[15]为
 | (8) |
式中:I0为太阳垂直照射强度;τ为太阳能辐射的衰变系数;ηsc为太阳能电池转化效率;Ssc为太阳能电池的面积;h为太阳高度角。
白天太阳能电池产生的能量供给飞机正常运转。多余的能量则存储于蓄电池中,在太阳辐射量不足或夜间维持飞机正常飞行。设白天的时间为Td,夜晚的时间为Tn。为了让太阳能飞机能连续24 h不间断飞行,获得的太阳能总能量应该满足飞机飞行所需能量。假设飞机在某高度巡航飞行,则能量平衡方程为
 | (9) |
式中:tr为日出时刻;ts为日落时刻;ηmppt为最大功率跟踪器效率;ηbat为蓄电池效率; t为时间。根据能量平衡方程可推出单位时间单位面积太阳能电池获得的能量和单位面积的平飞需用功率关系为
 | (10) |
2.2 质量分析模型 太阳能飞机的质量由机体结构、太阳能电池、蓄电池、推进系统和负载的质量组成,即
 | (11) |
式中:mafl、msc、mbat、mp和meq分别为机体结构、太阳能电池、蓄电池、推进系统和负载的质量。各个分系统的质量为
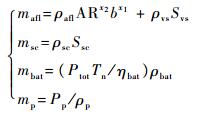 | (12) |
式中:ρafl为机身结构的密度;AR为展弦比;b为展长;x1和x2分别为与展长和展弦比对应的指数因子[16];ρvs为垂直支撑面的密度;Svs为垂直支撑面的面积;ρsc为太阳能电池密度;ρbat为蓄电池能量密度;ρp为推进装置功重比。
2.3 总体参数设计方法 太阳能飞机的所有参数可分为3类:一类是技术参数,和太阳能飞机的各子系统的技术水平有关;另一类是任务参数,和太阳能飞机需要完成的设计任务有关;还有一类是设计参数,和太阳能飞机的构型以及飞行状态有关,在这里选择机翼展弦比、展长、重心位置以及垂直支撑面长度作为设计参数。
太阳能飞机的总体参数众多,而且可以互相推导,根据飞机的质量组成,可以很好地得到其质量的迭代方程,所以选取质量为主要的迭代参数,求解出质量可以推导出其他的总体参数。程序的算法框图见图 5。根据质量分析模型方程式(11)和式(12),联立式(6)和式(7)得到质量迭代方程mk+1=f(mk),f(mk)为各子系统质量函数之和,k为迭代次数。选取初值m0可迭代求解飞机的质量,若为正实根,则方程有解,同时代入方程式(9)判断飞机是否可以实现昼夜飞行。如果满足昼夜能量平衡方程,则设计参数满足要求;如果不满足昼夜平衡方程,则改变设计参数,继续进行质量迭代。通过判断是否满足昼夜飞行条件,可以将符合条件的构型设计参数可行域确定下来。以巡航飞行功率和静稳定性为设计指标,从可行构型中确定最优构型。
 |
| 图 5 程序的算法框图 Fig. 5 Block diagram of program algorithm |
| 图选项 |
3 结果分析与讨论 “T”构型与常规构型太阳能飞机最大区别是降低重心,增加了垂直支撑面连接机身和机翼。因此主要分析重心位置和垂直支撑面的设计参数。对于静稳定的太阳能飞机,其静稳定裕度有一定要求,假设静稳定性边界为?Cm/?CL=-0.15(Cm为俯仰力矩系数)。任务指标如表 1所示。
表 1 太阳能飞机的任务指标 Table 1 Mission index of solar-powered aircraft
| 任务指标 | 纬度/(°) | 日期 | h/km | Peq/W | meq/kg |
| 数值 | 40 | 春至日 | 8.0 | 100 | 150 |
表选项
3.1 静稳定性分析 设飞机重心坐标为(xcg, 0, zcg),坐标原点取平均气动弦前缘点在机身轴线上的投影点,其重心坐标进行无量纲化,xcg为真实位置除以平均气动弦长,zcg为真实位置除以垂直支撑面长度。zcg和飞机机翼尺寸有关,zcg和展弦比、展长的关系如图 6所示。因此主要研究太阳能飞机垂直支撑面的长度和重心坐标位置xcg对飞机静稳定性的影响。图 7(a)所示为垂直支撑面的长度l对俯仰力矩曲线的影响。可知,随着垂直支撑面长度的增加,俯仰力矩系数对迎角的导数Cmα增大,飞机的静稳定性增强。
 |
| 图 6 zcg和展弦比、展长的关系 Fig. 6 Relationship between zcg and aspect ratio and span |
| 图选项 |
 |
| 图 7 垂直支撑面长度l与重心位置xcg对俯仰力矩曲线的影响 Fig. 7 Influences of length of vertical supporting surface l andcentre of gravity position xcg on pitch moment curves |
| 图选项 |
在一定移动范围内,飞机重心坐标位置xcg可以通过质量布置调整,并不影响飞机的总质量大小和升阻特性。图 7(b)为重心坐标位置xcg对俯仰力矩曲线的影响。可见和舵面偏转相似,改变重心坐标沿机身方向的位置可以改变配平点,因此可将配平迎角设计在最佳的巡航迎角处。但从俯仰力矩系数对迎角的导数来看,改变重心坐标位置xcg对静稳定性也有一定影响。
3.2 平飞需用功率分析 由式(10)可知,对于太阳能飞机,不仅希望单位时间单位面积太阳能电池获得的太阳能越多,而且希望平飞需用功率和面积的比值越小。前者是由太阳能电池的效率和入射角决定,后者是由飞机构型决定。故研究机翼展弦比和展长变化对单位面积平飞需用功率的影响,如图 8所示。从图中可以看出, 仅考虑机翼展弦比和展长变化情况下,单位面积平飞需用功率存在最小值。
 |
| 图 8 Ptot/S和AR、b关系 Fig. 8 Relationship between Ptot/S and AR, b |
| 图选项 |
垂直支撑面长度对单位面积平飞需用功率和静稳定性的影响如图 9所示。可见,单位面积平飞需用功率随垂直支撑面长度减小而降低,但?Cm/?CL增加,即静稳定性降低,?Cm/?CL需满足最小稳定裕度要求。
 |
| 图 9 垂直支撑面长度对Ptot/S和静稳定性的影响 Fig. 9 Influences of length of vertical supporting surface on Ptot/S and static stability |
| 图选项 |
3.3 对比研究 在相同的技术任务参数下,满足静稳定裕度?Cm/?CL=-0.15,当展长为42.7m,展弦比为10.5,重心坐标为(0.22, 0, 0.32),垂直支撑面长度为7.1 m时,“T”构型太阳能飞机最小单位面积平飞需用功率为29.91W/m2。而满足相同静稳定裕度情况下,常规构型太阳能飞机的最小单位面积平飞需用功率为31.77W/m2。与之相比,该构型太阳能飞机的单位面积平飞需用功率减小了6.2%,应用效果明显。
3.4 操纵特性分析 为了实现太阳能飞机以不同速度定直平飞,在机翼中段后缘处布置可上下偏转的操纵舵面。其操纵力矩对俯仰力矩系数的影响如图 10(a)所示。不同迎角下定直飞行采用舵面偏转进行配平,其静稳定性是变化的。由图 7(b)可知,xcg变化对配平点是有影响的,同时占全机质量接近1/4的锂电池布置于机身内,因此考虑xcg和舵面偏转的组合操纵。其俯仰力矩曲线如图 10(b)所示。组合操纵不仅满足配平需求还改善了配平点的静稳定性。
 |
| 图 10 操纵力矩和组合操纵对俯仰力矩系数的影响 Fig. 10 Influences of operating moment and combined control on pitch moment coefficient |
| 图选项 |
4 结论 本文针对气动配平损失,提出了“T”构型太阳能飞机,经建模仿真表明:
1)该构型太阳能飞机采用降低重心的自配平原理,降低了巡航状态下气动配平损失。增加垂直支撑面的长度有利于提高飞机的静稳定性,但也增加了飞机的阻力和质量。根据静稳定裕度边界要求,设计垂直支撑面的长度。改变重心坐标沿机身方向的位置可以改变配平点,可将巡航配平迎角设计在最小平飞功率对应迎角处。
2)满足任务要求,当静稳定裕度?Cm/?CL=-0.15时,以单位面积平飞需用功率最小为目标,“T”构型太阳能飞机存在最佳设计参数:展长为42.7m,展弦比为10.5,重心坐标为(0.22, 0, 0.32),垂直支撑面长度为7.1m。
3)与常规构型太阳能飞机相比,该构型太阳能飞机的单位面积平飞需用功率减小了6.2%,降低了配平损失,应用效果明显。
4) xcg变化和舵面偏转的组合操纵不仅满足以不同迎角飞行时的配平需求,还改善了配平点的静稳定性。
综上所述,定量分析了“T”构型太阳能飞机的配平原理和设计方法,该构型不仅能减少配平损失,而且满足静稳定性设计要求。今后还将对飞机结构设计、纵向动稳定性以及横侧向稳定性进行进一步研究,优化与完善构型设计。
参考文献
| [1] | IRVING F G, MORGAN D.The feasibility of an aircraft propelled by solar energy[C]//Proceedings of the AIAA/MIT/SSA 2nd International Symposium on the Technology and Science of Low Speed and Motorless Flight.Reston: AIAA, 1974:1-9. |
| [2] | YOUNGBLOOD J W, TALAY T A.Solar-powered airplane design for long-endurance, high-altitude flight[C]//AIAA 2nd International Very Large Vehicles Conference.Reston:AIAA, 1982:1-8.http://arc.aiaa.org/doi/pdfplus/10.2514/6.1982-811 |
| [3] | BRANDT S A, GILLIAM F T. Design analysis methodology for solar-powered aircraft[J].Journal of Aircraft, 1995, 32(4): 703–709.DOI:10.2514/3.46780 |
| [4] | ENRICO C. Design of solar high altitude long endurance aircraft for multi payload and operations[J].Aerospace Science and Technology, 2006, 10(6): 541–550.DOI:10.1016/j.ast.2006.06.001 |
| [5] | MEYER J, DU PLESSIS J A F, ELLIS P, et al.Design considerations for a low altitude long endurance solar powered unmanned aerial vehicle[C]//AFRICON, 2007.Piscataway, NJ:IEEE Press, 2007:1-7. |
| [6] | LEUTENEGGER S, JABAS M, SIEGWART R Y. Solar airplane conceptual design and performance estimation[J].Journal of Intelligent & Robotic Systems, 2011, 61(1-4): 545–561. |
| [7] | ZHU X F, GUO Z, FAN R F, et al. How high can solar-powered airplanes fly[J].Journal of Aircraft, 2014, 51(5): 1653–1659.DOI:10.2514/1.C032333 |
| [8] | GAO X Z, HOU Z X, GUO Z, et al. Energy management strategy for solar-powered high-altitude long-endurance aircraft[J].Energy Conversion and Management, 2013, 70: 20–30.DOI:10.1016/j.enconman.2013.01.007 |
| [9] | ZHU X F, GUO Z, HOU Z X, et al. Solar-powered airplanes:A historical perspective and future challenges[J].Progress in Aerospace Sciences, 2014, 71: 36–53.DOI:10.1016/j.paerosci.2014.06.003 |
| [10] | BOUCHER R J.History of solar flight[C]//AIAA/SAE/ASME.20th Joint Propulsion Conference.Reston:AIAA, 1984:14-29. |
| [11] | NOLL T E, BROWN J M, PEREZ-DAVIS M E, et al.Investigation of the helios prototype aircraft mishap:NASA Report 64317[R].Washington, D.C.:NASA, 2004. |
| [12] | MARDANPOUR P, HODGES D H. Passive morphing of flying wing aircraft:Z-shaped configuration[J].Journal of Fluids and Structures, 2014, 44: 17–30.DOI:10.1016/j.jfluidstructs.2013.09.020 |
| [13] | 马东立, 包文卓, 乔宇航. 利于冬季飞行的太阳能飞机构型研究[J].航空学报, 2014, 35(6): 1581–1591.MA D L, BAO W Z, QIAO Y H. Study of solar-powered aircraft configuration beneficial to winter flight[J].Acta Aeronautica et Astronautica Sinica, 2014, 35(6): 1581–1591.(in Chinese) |
| [14] | ROSS H.Fly around the world with a solar-powered airplane[C]//Proceedings of the 26th Congress of International Council of the Aeronautical Science.Reston:AIAA, 2008:1-11. |
| [15] | 沈辉, 曾祖勤. 太阳能光伏发电技术[M].北京: 化学工业出版社, 2005: 6-14.SHEN H, ZENG Z Q. Solar photovoltaic power generation technology[M].Beijing: Chemical Industry Press, 2005: 6-14.(in Chinese) |
| [16] | NOTH A, SIEGWART R, ENGEL W.Design of solar powered airplanes for continuous flight[D].Zürich:ETH Zürich, 2008. |
