针对威胁区域建模问题,大多数研究都将威胁区域简化为有固定边界的几何多边形[4, 5],并在此基础上设计控制策略,使UAV自主避开威胁到达目的地以达到完成任务的目的。同时,该方法也应用在了机器人路径规划[6, 7]及协同到达[8]等方面,这类方法仅简单考虑了探测威胁边界达到目的地,没有考虑UAV自身的隐身、机动性能以及较强的突防能力。但在目标跟随过程中,除了考虑威胁对UAV的损伤外,还需考虑能否跟上目标以及在威胁区域中停留时间等问题。在跟随目标过程中,为了避免目标丢失,UAV不得不经过或进入到某些威胁区域中,很显然此类方法具有一定的局限性。
针对多威胁环境下UAV的飞行决策问题,部分文献从不同角度进行了研究。文献[9]通过威胁等效的方式,将威胁分级并层次化得到了威胁的作用半径,利用UAV飞行姿态与雷达散射截面(Radar Cross Section,RCS)之间的关系,采用改进粒子群优化算法进行航路规划,使得UAV具有穿越一部分威胁区域的能力。文献[10]考虑动态RCS特性和雷达发现准则提出基于改进快速扩展随机树的隐身突防航路规划方法,能够在复杂环境下快速生成突防路径。上述研究强调的是利用UAV的隐身特性实现突防,而隐身UAV通常用于防守方实力较弱的情况,运用中也有一定的局限性。
控制UAV规避威胁的方法大致可分为两大类[11]:第1类采用离线或在线航路规划方法产生规避威胁的航路,再运用航路跟踪算法沿着所产生的航路进行飞行,以达到规避障碍的目的[4, 5, 11]。文献[5]中引入几何学中的L图用于航路规划,能够引导UAV有效规避威胁区域,原理简单易于实现。文献[12]中采用改进的Grossberg神经网络算法生成规避航路,采用基于MPC的航路跟踪控制器控制UAV生成规避路径,能够控制UAV成功规避障碍。第2类方法则利用UAV本地控制器根据机载传感器探测到的实时威胁信息进行融合并产生规避指令。Call等[13]提出了基于人工势场法的威胁规避控制方法,取得了较好的控制效果。
针对目标跟踪制导控制问题,国外许多****进行了相关的研究。文献[14]提出了在目标周围定义一个全局引力场,通过向量场的作用控制UAV到达稳定的观测轨线上。文献[15]采用了一种实时的航路规划方法来确保UAV与目标之间的相对固定距离,通过UAV导航模块进行航路跟踪。文献[16]提出了虚拟目标的UAV目标跟踪方法,并采用模型预测控制的方法进行飞行控制率的设计。文献[17]将UAV目标跟踪控制作为具有边界条件的最优控制问题,提出了一种基于Lyapunov向量场和切线向量场相结合的组合导航方法。尽管这些方法没有考虑真实战场环境中威胁对UAV的损伤及威胁程度,但其在理论方面取得了一定的成果,也逐步提高了目标跟踪的精度。
分析上述方法,对本文的研究和提出的问题具有很强的借鉴意义。在多威胁条件影响下,本文研究了UAV跟随运动目标的问题,并提出了一种基于规则的UAV智能目标跟随策略,该策略可以避免UAV进入威胁较大的区域,保证UAV与目标之间的相对距离,并在威胁等级较低的区域快速通过,避免停留时间过长,该方法即保证了UAV的安全性,又能很好地跟随运动目标。
1 威胁概率图模型在真实的作战任务中,需要考虑威胁、障碍和受限区域的存在以及对UAV的影响,避免对UAV不必要的损伤,保证任务顺利完成。此处将威胁作为影响UAV安全或导致UAV损伤的主要因素。当UAV在多威胁区域中飞行或者执行任务时,飞行安全可以根据在特定时间、特定位置处其受损或者丧失能力的概率加以描述。因此,本文采用一种高斯概率分布形式建立威胁概率图(Threat Probability Map,TPM)模型。
式中:r=(x y)T为相对于惯性坐标系的位置向量;μi为第i个威胁的均值向量;Ki为第i个威胁的协方差矩阵。
式中:μx,i和μy,i分别为第i个威胁源沿着x和y方向上的均值;σx,i2和σy,i2分别为第i个威胁源沿着x和y方向上的方差。
采用高斯分布描述威胁的特征一般遵循多维高斯分布。假设在40 km×40 km区域中随机确立11个威胁中心及协方差矩阵建立TPM模型。图 1和图 2分别为多威胁区域的风险度及二维平面投影示意图。
 |
| 图 1 多威胁区域的风险度示意图Fig. 1 Schematic of risk degree of multi-threats area |
| 图选项 |
 |
| 图 2 风险度在二维平面投影图Fig. 2 Project of risk degree on two dimension plat |
| 图选项 |
2 基于决策树的智能目标跟随策略设计2.1 基本集合元素定义假设Ts为制导更新周期,在离散时刻t=kTs,k={0,1,…,n},更新UAV的航向指令ψcmd及速度指令Vcmd。图 3为UAV与运动目标的位置和航向示意图。图中:
 为UAV与目标的相对位置向量;VHC为UAV航向约束范围;VHDC为UAV与目标之间的航向偏差约束范围;ψL和ψR为UAV最大向左和向右航向角;rs为UAV的探测半径;rp为近似区域半径;ψmax为UAV最大转角角度;ψHDC为航向角偏差;Dp为近似圆区域。可以看出,相对于参考坐标系而言,UAV和目标的位置分别为
为UAV与目标的相对位置向量;VHC为UAV航向约束范围;VHDC为UAV与目标之间的航向偏差约束范围;ψL和ψR为UAV最大向左和向右航向角;rs为UAV的探测半径;rp为近似区域半径;ψmax为UAV最大转角角度;ψHDC为航向角偏差;Dp为近似圆区域。可以看出,相对于参考坐标系而言,UAV和目标的位置分别为  UAV=(xu,yu)和 t=(xt,yt),航向角分别为ψUAV和
UAV=(xu,yu)和 t=(xt,yt),航向角分别为ψUAV和  。
。 |
| 图 3 UAV与运动目标的位置和航向示意图Fig. 3 Schematic of position and heading of UAV and moving target |
| 图选项 |
假设Cp(k)为k时刻近似圆,则k+1时刻以目标预测位置为中心的近似圆如图 3所示。

假设Dp(k)为k时刻以Cp(k)为边界的区域,用于描述UAV与目标之间是否接近,半径rp不同代表接近程度不同。则k+1时刻以目标预测位置为中心的近似圆区域如图 3所示。

图 4为VPR和VFPR示意图。可以看出,可达圆Cr(k)是以UAV位置为中心,当前速度VUAV(k)和制导更新周期Ts乘积为半径所形成的区域,如式(5)所示:
 |
| 图 4 VPR和VFPR示意图Fig. 4 Schematic of VPR and VFPR |
| 图选项 |

邻近区域VPR为Cr(k)和Cp(k)的交叉点处形成的扇形区域,此区域由Cr(k)、Cp(k)和Dp(k)的位置关系进行确定。
可行邻近区域VFPR为VPR和VHC相交的扇形区域,此区域可由VPR和VHC的大小和范围确定,即VFPR=VHC∩VPR。如果VFPR=∅,说明UAV以当前速度不能移动到Dp(k)内。如果VFPR≠∅,说明UAV能以当前速度移动到Dp(k)中。
当UAV接近威胁区域时,UAV需尽快改变飞行航向并远离受限区域,因此UAV会根据当前的飞行方向以及自身的航向约束范围来决定下一时刻的安全飞行范围VSHR。在UAV当前位置处寻找到梯度下降最快的方向,并取该方向的切线方向与当前UAV自身航向角约束范围的交集作为UAV的安全飞行航向范围VSHR,即UAV所改变的飞行航向限制在VSHR内,使UAV能尽快远离受限区域,VSHR为图 5中阴影区域。图中:ψmin为最小梯度方向角;ψtgR和ψtgL为最小梯度方向的切线方向角。
 |
| 图 5 UAV的安全航向范围Fig. 5 Safe heading range of UAV |
| 图选项 |
2.2 生成决策树UAV在多威胁区域中执行目标跟随任务时,除了考虑跟随精度外,还需考虑受损及安全性等问题,因此,UAV在自主跟随过程中需要同时满足以下3种目标:①避免受限区域;②保持与目标之间的距离;③UAV损伤程度最小。根据3种目标的不同优先级以及UAV与目标之间的几何关系设计了不同的决策条件和规则状态并生成决策树,进而生成UAV的期望航向角及期望速度指令。
决策条件1 在飞往威胁区域过程中UAV是否处于危险状态。此条件根据VSHR及特定位置处的TPM值进行量化,为了更好地避免进入受限区域,UAV需要以当前速度,沿着当前航向、最大向右航向以及最大向左航向进行n步预测,本文采用三步预测方法。此时,在参考坐标系中,UAV的3个预测位置根据式(6)进行计算:

式中:xc为UAV当前的x坐标;yc为UAV当前的y坐标;Vc(k)为UAV当前的速度;n为预测时域长度;ψi(k)为k时刻UAV所选取的航向。此时,UAV需要估计这3个指定位置处的TPM值。如果f(xi,yi)≥f2(f2为受限区边界概率密度),说明UAV处于高威胁区(High Threaten Area,HTA),UAV无论选择哪个飞行航向都将进入该受限区域。如果部分f(xi,yi)<f2并且VSHR≠∅,说明UAV处于低威胁区(Low Threaten Area,LTA)。如果所有f(xi,yi)<f2,说明UAV处于无威胁区域(No Threaten Area,NTA)。
决策条件2 确定下一周期UAV是否位于近似圆内。此条件根据VPR、VHC和VSHR进行量化。当决策条件1为NTA时,如果VHC∩VPR≠∅,说明UAV能够生成速度-航向指令进入Dp(k+1)内。当决策条件1为LTA时,如果VSHR∩VPR≠∅,说明UAV能够在安全航向范围内选择速度-航向指令进入Dp(k+1)内。
决策条件3 确定UAV航向与目标估计航向是否接近。通过VHC和VHDC进行量化。当决策条件1为NTA时,如果VHC∩VHDC≠∅,说明UAV与目标的航向接近。当决策条件1为LTA时,如果VSHR∩VHDC≠∅,说明UAV能够在安全航向范围内选择速度-航向指令保持与目标接近。
决策条件4 确定UAV是否朝Dp(k)飞行。根据VHC、VHDC、VSHR和ψLOS进行量化。其中,ψLOS为相对于参考坐标系的相对角度。当决策条件1为NTA时,如果ψLOS⊂(VHC∩VHDC),说明UAV能够朝向Dp(k)飞行。当决策条件1为LTA时,如果ψLOS⊂(VSHR∩VHDC),说明UAV能够安全地朝向Dp(k)飞行。
根据上述设计的决策条件及产生的决策结果,建立UAV智能目标跟随策略决策树,如图 6所示。
 |
| 图 6 UAV智能目标跟随策略决策树Fig. 6 Decision trees of UAV intelligent target following strategy |
| 图选项 |
在目标跟随过程中,UAV按照不同决策层级自主生成航向/速度指令,具体的策略状态和决策条件对应关系如表 1所示。
表 1 决策条件和策略状态Table 1 Decision conditions and strategy states
| 策略状态 | 决策条件1 | 决策条件2 | 决策条件3 | 决策条件4 |
| ① | NTA | N | Y | Y |
| ② | NTA | N | Y | N |
| ③ | NTA | N | N | N/A |
| ④ | NTA | Y | N/A | N/A |
| ⑤ | LTA | N | Y | Y |
| ⑥ | LTA | N | Y | N |
| ⑦ | LTA | N | N | N/A |
| ⑧ | LTA | Y | N/A | N/A |
| ⑨ | HTA | N/A | N/A | N/A |
表选项
2.3 不同策略条件下UAV航向/速度指令设计根据期望航向ψd和容许航向范围VAHR计算航向指令ψcmd。假定以下3种航向:目标估计方向
(k)、最小梯度下降方向ψmin(k)和相对位置向量方向ψLOS(k)。智能跟随导航的主要任务就是根据不同的决策状态选择其中一种航向作为UAV的期望航向,具体策略如下。策略1 策略状态①为NTA,策略状态②为N时,说明UAV在无威胁区域中飞行,但UAV与目标之间的距离不在指定范围内。然而智能目标跟随策略的最终目的就是在避免威胁区域的同时还能与目标保持在指定的范围内。为了满足目标2的要求,UAV需要尽可能地飞往以目标估计位置为中心的Dp(k)内,则UAV所选航向为

式中:
 用于提高UAV的跟随精度。此时,UAV的容许航向范围为VAHR=VHC∩VHDC。
用于提高UAV的跟随精度。此时,UAV的容许航向范围为VAHR=VHC∩VHDC。策略2 策略状态③与前2个策略状态类似,但不同之处在于决策条件3为N,说明UAV与目标的航向偏差很大,不在允许范围之内。在快速跟随过程中,很容易导致UAV与目标不在规定的近似圆内,造成目标丢失。此时,UAV需要进行快速转弯,并与
(k)相同,即ψd(k)= (k)。UAV的容许航向范围为VAHR=VHC。策略3 在策略状态④中目标1与目标2完成的前提下,需要进一步完成目标3。因此,此策略应引导UAV沿着威胁影响最小的方向飞行,但其很可能使UAV与目标不在一定范围内,导致策略中的2种目标相互冲突,因此需要在2种相互冲突目标之间进行均衡处理。
根据UAV的动力学约束确定自身的容许航向范围为VAHR=VHC∩VPR,考虑到UAV的安全性,最有可能的航向为ψmin(k)。在此引入一个临时航向角ψtp(k),如果ψmin(k)∈VAHR,ψtp(k)=ψmin(k);否则,ψtp(k)应选取VAHR边界上与ψmin(k)最接近的方向。图 7为惯性坐标系与局部坐标系示意图。图中:rtg(k)为k时刻从目标中心到交点yL2处的方向向量;rt(k)为k时刻目标相对于坐标系的位置向量;ryL2(k)为k时刻交点yL2相对于坐标系的位置向量;ψtg1(k)和ψtg2(k)分别为交点yL2与近似圆Cp(k)相切后所形成的2个切向角。定义一个局部坐标系统,以UAV当前位置为原点,纵轴yL与水平方向的夹角为ψtp(k)。此时,纵轴yL与近似圆Cp(k)相交于2个点yL1和yL2。
 |
| 图 7 惯性坐标系与局部坐标系示意图Fig. 7 Schematic of inertia and local coordinates |
| 图选项 |
为便于计算,需在惯性坐标系和局部坐标系之间进行转换,则从惯性坐标系到局部坐标系的旋转矩阵为

交点yL1和yL2坐标为

在点yL2处的2个切线方向与水平方向的夹角为ψtg1和ψtg2,近似圆Cp(k)的中心达到yL2点的位置向量为rtg(k)。

根据旋转矩阵进行计算:

式中:
UAV(k)为UAV相对于坐标系的位置向量。根据式(11)和式(12),在惯性坐标系下的位置向量为
式中:
 和
和  为单位向量。则在点yL2处的2个切线方向与水平方向的夹角分别为ψtg1和ψtg2:
为单位向量。则在点yL2处的2个切线方向与水平方向的夹角分别为ψtg1和ψtg2:
为了满足与目标接近以及UAV损伤概率最小2个目标要求,采用一种有效方式进行加权。假设沿ψtp(k)和ψtg方向上的单位向量分别为

因此,在惯性坐标系中,期望航向向量rd(k)为utp(k)和utg(k)的加权和。

式中:δ(k)∈[0,1]为权重因子,目的是使2种目标之间进行更加合理的权衡。一般情况下,权重参数δ(k)∈(0,1)的设计如式(19)所示:
式中:δc(k)为k时刻在局部坐标系下UAV离目标中心点的远近程度,δc(k)=yL2(k)/2rp;δtg和δtp为尺度因子,是本文策略所设计的参数。根据式(18),计算得到UAV的期望航向角为
策略状态⑤~策略状态⑧中的策略与策略状态①~策略状态④类似,可以继续采用上述策略进行决策,唯一不同之处在于UAV的容许航向范围需要改变,将上述规则中UAV自身容许约束VHC转变为UAV的安全航向范围VSHR即可。
策略4 在策略状态⑨中,UAV已经处于HTA,此时UAV需要进行快速转弯避免进入受限区域,因为选取UAV的自身航向约束VHC为容许航向范围VAHR。期望航向ψd必定选取最速下降方向ψmin(k),即VAHR=VHC,ψd=ψmin(k)。
当存在威胁或受限区域时,除了调整飞行航向外,UAV还需调整自身速度进行有效机动。对于策略状态①~策略状态⑧而言,采用基于速度误差和位置误差的比例控制算法确定UAV的期望飞行速度。速度误差用于描述UAV的速度与目标估计速度之间的差值,通过速度误差来确定如何根据目标的估计速度对UAV的速度进行合理调整。位置误差用于确定UAV与近似圆区域Dp(k)之间的相对距离。
图 8为局部坐标系下UAV与近似圆之间的位置误差示意图。假设UAV在航向指令ψcmd(k)引导下与近似圆存在2个交点,交点坐标计算根据式(9)和式(10)进行,则位置误差为e(k)=(yL1(k)+yL2(k))/2,根据2个交点的符号判断UAV与Dp之间的位置关系。因此,对2种误差进行加权得到UAV的期望速度为
 |
| 图 8 局部坐标系下UAV与近似圆之间的位置误差示意图Fig. 8 Schematic of position error between UAV and proximity circle in local coordinate |
| 图选项 |

式中:
 为目标的估计速度;VUAV(k)为UAV当前速度;Ks和Ke为比例系数。对于不同的状态,比例系数的选择也是不同的。例如策略状态①和策略状态⑤,虽然UAV不在Dp内,但是朝向Dp飞行,此时UAV需要以较短的时间加速飞行进入该区域。
为目标的估计速度;VUAV(k)为UAV当前速度;Ks和Ke为比例系数。对于不同的状态,比例系数的选择也是不同的。例如策略状态①和策略状态⑤,虽然UAV不在Dp内,但是朝向Dp飞行,此时UAV需要以较短的时间加速飞行进入该区域。在策略状态⑨中,UAV处于一个较高威胁的区域,此时UAV需要沿着最速下降方向快速飞行,尽快使UAV远离高威胁区域。因此,UAV的期望飞行速度为

式中:amax为UAV最大加速度约束。
1) 目标的初始位置为(38,5),初始速度为50 m/s,初始航向角为π/2。
2) UAV的初始位置为(39,2),初始速度为100 m/s,初始航向角为2π/3。
3) UAV的最小和最大飞行速度分别为50 m/s和180 m/s,最大和最小加速度分别为3 m/s2和-3 m/s2,最大转弯角速率为π/12 rad/s,制导更新周期Ts=3 s。
4) UAV机载传感器探测范围为2 km,近似圆范围为1.5 km。
5) 受限区边界概率密度f2=0.02,航向角偏差范围ψHDC*=π/4。
6) UAV与近似圆之间的远近程度参数为:δtg=0.05,δtp=0.20。
7) 指令速度比例控制增益参数为:Ks=0.5,Ke=0.000 5。
8) 测量噪声的标准偏差为0.05 km。
9) 加速目标的运动方程为
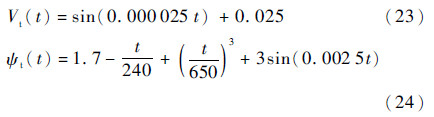
图 9为基于离散点寻优法的加速目标跟随仿真,图 10为基于规则的智能加速目标跟随仿真。从图 9和图 10中可以看出,目标从起始位置加速到达最终位置并形成一条运动轨迹,同时经过3个受限区域(主要指高炮掩护区域),此时UAV在跟随加速目标的过程中,需要禁止UAV进入这些受限区域,尽量缩短UAV在威胁区域内的飞行时间,尽可能避免UAV的损伤甚至损毁。图 9中,UAV采用离散点寻优法进行跟随决策,发现UAV多次进入受限区域内,UAV会不同程度地出现损伤或整机损毁现象,损毁概率较大。然而在图 10中,采用基于规则的智能目标跟随方法能够很好地避免UAV进入受限区域内,并且采用三步预测方法能够提前预测威胁的边界和影响范围,进而在遇到威胁区域时,针对不同规则提前做出决策,选取合适的航向和速度指令来引导UAV飞行,很好地避开受限区域并与目标保持一定的距离,既保证了UAV的安全性,又避免了跟随任务中目标丢失,进而验证了本文所提方法的有效性。
 |
| 图 9 基于离散点寻优法的加速目标跟随仿真Fig. 9 Following simulation for acceleration target based on discrete point optimization method |
| 图选项 |
 |
| 图 10 基于专家规则的智能加速目标跟随仿真Fig. 10 Following simulation for intelligent acceleration target based on expert rules |
| 图选项 |
10) 复杂运动目标的运动方程如下。
减速运动阶段模型:
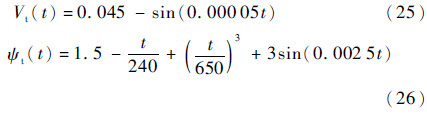
加速运动阶段模型:
图 11为基于离散点寻优法的复杂运动目标跟随仿真,图 12为基于专家规则的智能复杂运动目标跟随仿真。从图 11和图 12中可以看出,目标从起始位置开始以减速及加速交替的方式进行运动并形成一条运动路径,同时经过4个受限区域。图 11中,UAV进入到前2个受限区域,此时UAV受到的损伤概率非常大,由于采用离散点寻优法的决策机制比较单一,计算速度较慢,从而会使得UAV失去对目标的实时探测,最终导致目标丢失。在图 12中,采用基于专家规则的智能跟随方法可以根据UAV所处状态,针对不同规则以及三步预测的信息,采用预测控制方法进行决策,决策机制较为全面,使得UAV没有进入到威胁等级较高区域并能在即将接近该区域时提前进行机动,降低UAV损伤概率,确保UAV实时探测到目标,进一步验证本文所提方法的有效性。
 |
| 图 11 基于离散点寻优法的复杂运动目标跟随仿真Fig. 11 Follwing simulation for complex moving target based on discrete point optimization method |
| 图选项 |
 |
| 图 12 基于专家规则的智能复杂运动目标跟随仿真Fig. 12 Following simulation for intelligent complex moving target based on expert rules |
| 图选项 |
4 结 论针对单架UAV跟随目标而言,UAV需要考虑威胁对自身的损伤程度、避免进入高威胁区域以及保证目标跟随精度等问题,并且需要UAV根据所处不同情况进行比较有针对性地决策,因此本文提出了一种基于规则的UAV智能目标跟随策略,经仿真验证表明:
1) 在原有威胁概率图模型基础上,根据UAV、运动目标以及所提出的任务优先级设计出不同规则条件下UAV飞行航向及速度指令。
2) 采用了一种基于专家系统规则的智能决策方法,并在不同的规则下采用模型预测控制算法中的滚动时域预测方法进行决策。
3) 将该方法应用于UAV对地面加速目标和复杂运动目标跟随任务中,根据不同规则实时改变UAV的速度和航向控制指令,使UAV受到的损伤概率达到最小,并较好地跟随此2种目标,进一步验证了本文所提方法的有效性。
参考文献
| [1] | BERTUCCELLI L F, HOW J P.Search for dynamic targets with uncertain probability maps[C]//Proceedings of the 2006 American Control Conference.Piscataway,NJ:IEEE Press,2006:737-742. |
| [2] | ALTSHULER Y, YANOVSKY V,WAGNER I A,et al.Efficient cooperative search of smart targets using UAV swarms[J].Robotica,2008,26(4):551-557. |
| [3] | TRODDEN P, RICHARDS A.Multi-vehicle cooperative search using distributed model predictive control:AIAA-2008-7138[R].Reston:AIAA,2008. |
| Click to display the text | |
| [4] | CHOI J W, CURRY R E,ELKAIM G H.Real-time obstacle-avoidance path planning for mobile robots:AIAA-2010-8411[R].Reston:AIAA,2010. |
| [5] | 王树磊,魏瑞轩, 沈东,等.面向航路规划的Laguerre图构造算法[J].系统工程与电子技术,2013,35(3):552-556. WANG S L,WEI R X,SHEN D,et al.Laguerre diagram construction algorithm for path planning[J].Systems Engineering and Electronics,2013,35(3):552-556(in Chinese). |
| Cited By in Cnki (3) | Click to display the text | |
| [6] | MASEHIAN E, AMIN-NASERI M R.A Voronoi diagram visibility graph-potencial field compound algorithm for robot path planning[J].Journal of Robotic Systems,2004,21(6):275-300. |
| Click to display the text | |
| [7] | TOMONO M. Planning a path for finding targets under spatial uncertainties using a weighted Voronoi graph and visibility measure[C]//Proceedings of 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ:IEEE Press,2003:124-129. |
| Click to display the text | |
| [8] | CORTES J, MARTINEZ S,BULLO F.Robust rendezvous for mobile autonomous agents via proximity graphs in arbitrary dimensions[J].IEEE Transactions on Automatic Control,2006,51(8):1289-1298. |
| Click to display the text | |
| [9] | 唐上钦,黄长强, 胡杰,等.基于威胁等效和改进PSO算法的UCAV实时航路规划方法[J].系统工程与电子技术,2010,32(8):1706-1710. TANG S Q,HUANG C Q,HU J,et al.Threat equivalent and improved PSO algorithm based real-time method of UCAV route planning[J].Systems Engineering and Electronics,2010,32(8): 1706-1710(in Chinese). |
| Cited By in Cnki (17) | |
| [10] | 莫松,黄俊,郑征,等. 基于改进快速扩展随机树方法的隐身无人机突防航迹规划[J].控制理论与应用,2014,31(3): 375-385. MO S,HUANG J,ZHENG Z,et al.Stealh penetration path planning for stealth unmanned aerial vehicle based on improved rapidly-exploring-random-tree[J].Control Theory & Application,2014,31(3):375-385(in Chinese). |
| Cited By in Cnki (3) | Click to display the text | |
| [11] | MUJUMDAR A, PADHI R.Evolving philosophies on autonomous obstacle and collision avoidance of unmanned aerial vehicles[J].Journal of Aerospace Computing Information and Communication,2011,8(2):17-41. |
| Click to display the text | |
| [12] | WANG X, YADAV V,BALAKRISHNAN S N.Cooperative UAV formation flying with obstacle/collision avoidance[J].IEEE Transactions on Control Systems Technology,2007,15(4): 672-679. |
| Click to display the text | |
| [13] | CALL B, BEARD R,TAYLOR C,et al.Obstacle avoidance for unmanned air vehicles using image feature tracking:AIAA-2006-6541[R].Reston:AIAA,2006. |
| [14] | FREW E, LAWRENCE D,MORRIS S.Coordinated standoff tracking of moving targets using Lyapunov guidance vector field[J].Journal of Guidance Control and Dynamics,2008,31(2):290-306. |
| Click to display the text | |
| [15] | RUANGWISET A. Path generation for ground target tracking of airplane-typed UAV[C]//Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics.Piscataway,NJ:IEEE Press,2009:1354-1358. |
| Click to display the text | |
| [16] | BELANGER J, DESBIENS A,GAGNON E.UAV guidance with respect of arrival specifications[C]//16th Mediterranean Conference on Control and Automation.Piscataway,NJ:IEEE Press,2008:1265-1270. |
| [17] | CHEN H, CHANG K C,AGATE C S.Tracking with UAV using tangent-plus-Lyapunov vector field guidance[C]//12th International Conference on Information Fusion,FUSION'09.Piscataway,NJ:IEEE Press,2009:363-372. |
