根据是否增加额外动力源,扭矩辅助型AMT分为2种:无源动力补偿型和有源动力补偿型[1]。有源动力补偿装置通常以电机作为动力源,对原变速箱的结构改动小,控制简单,输出扭矩更精确[2],但是成本较高,本文采用无源动力补偿方案。
根据换挡时刻发动机的状态不同,扭矩辅助型AMT换挡过程分为4种:有动力升挡、有动力降挡、无动力升挡和无动力降挡[3, 4]。其中无动力换挡过程中,辅助离合器不工作,换挡控制与传统的AMT相同。许多专家****[5, 6, 7, 8]对此都做过详尽论述。本文则着重对有动力换挡过程中的升挡控制进行研究。
在传统AMT上,增加了一套由辅助离合器和自动控制装置组成的扭矩辅助机构,使其在换档时避免了动力中断。本文建立扭矩辅助型AMT的动力学模型,制定了扭矩辅助型AMT有动力升挡控制策略。基于2挡升3挡工况进行仿真研究,并通过整车试验验证该控制策略的有效性。
1 扭矩辅助型AMT结构及工作原理1.1 结构图 1为扭矩辅助型AMT结构方案。它以AMT为基础,在中间轴和输出轴之间增加扭矩辅助机构,换挡过程中传递扭矩。该系统有2个离合器:一个是起步离合器,位于发动机和变速箱之间,确保汽车平稳起步;另一个是辅助离合器,在换挡时传递扭矩。
 |
| 1—起步离合器;2—输入轴;3—4、5挡同步器;4—输出轴4挡齿轮;5—输出轴3挡齿轮;6—2、3挡同步器;7—输出轴2挡齿轮;8—输出轴1挡齿轮;9—1挡倒挡同步器;10—输出轴倒挡齿轮;11—输出轴辅助离合器齿轮;12—输出轴;13—辅助离合器;14—倒挡轴;15—中间轴倒挡齿轮;16—中间轴1挡齿轮;17—中间轴2挡齿轮;18—中间轴3挡齿轮;19—中间轴4挡齿轮;20—中间轴5挡齿轮;21—中间轴。 图 1 扭矩辅助型AMT结构方案 Fig. 1 Torque-assist AMT structure scheme |
| 图选项 |
1.2 工作原理汽车起步时,起步离合器接合。起步结束后,起步离合器保持常接合状态。开始换挡时,辅助离合器的压力不断增加,传递的扭矩不断增大,当前挡位齿轮传递的扭矩不断减小。当扭矩减为零时,分离当前挡位的同步器,调整发动机转速,接合目标挡位同步器。当目标挡位齿轮完全接合时,降低辅助离合器压力直至为零,整个换挡过程结束。
图 2为扭矩传递示意图,以1挡升2挡为例说明换挡原理。开始换挡时,增大辅助离合器13的压力,使其开始传递扭矩。此时,一部分扭矩由中间轴21,通过辅助离合器13传递给输出轴12。随着辅助离合器扭矩不断增大,输出轴1挡齿轮8传递扭矩不断减小。当输出轴1挡齿轮8传递扭矩变为零时,推动1挡例挡同步器9,分离输出轴1挡齿轮8,此时辅助离合器13单独传递扭矩。扭矩传递路径如图 2黑色虚线所示。调整发动机的转速,当转速下降到2挡对应值时,推动2挡同步器6,输出轴2挡齿轮7接合。然后减小辅助离合器压力,辅助离合器扭矩不断变小,输出轴2挡齿轮7传递的扭矩不断增大,当辅助离合器扭矩为零时,换挡结束。此时的扭矩传递路径如图 2红色虚线所示。
 |
| 图 2 扭矩传递示意图 Fig. 2 Schematic of torque transmission |
| 图选项 |
2 动力学模型2.1 发动机模型发动机的扭矩Te可表达为节气门开度α和转速ne的函数,即Te=f(α,ne)。通过对发动机稳态试验数据进行插值,可以得到发动机的稳态扭矩[9]。
但是发动机在实际工作时,通常都处于动态工况,此时气缸内部混合物浓度不断变化,使得输出扭矩偏离稳态扭矩,此时无法通过发动机稳态试验数据拟合得到实际输出扭矩。因此,需要在稳态扭矩Te的基础上建立动态模型。发动机的动态输出扭矩Ted可以表示为[10]

式中:γ为非稳态工况下的发动机转矩下降系数,本文取0.03;ωe为发动机曲轴角速度;ε0为发动机曲轴角加速度。
2.2 离合器模型离合器包括起步离合器和辅助离合器,二者均为湿式离合器。湿式离合器有3种工作模式:完全分离、滑摩和完全接合。完全分离时,湿式离合器的主从动摩擦片之间会产生很小的带排扭矩,本文认为湿式离合器在完全分离的状态下不传递扭矩[11]。完全接合时,湿式离合器传递的扭矩是静摩擦扭矩。湿式离合器在完全分离和完全接合之间存在一个中间过渡过程,即滑摩过程,滑摩状态下湿式离合器传递动摩擦扭矩[12]。
湿式离合器的滑摩过程非常复杂,油液特性和摩擦副特性都影响其扭矩传递。湿式离合器传递的扭矩Tc由2个部分组成:粗糙扭矩和黏性扭矩,即[13, 14]

式中:Tr为粗糙扭矩;Tv为黏性扭矩。粗糙扭矩Tr是由摩擦面之间的凸起接触而产生的机械摩擦扭矩,其计算公式为[15]

式中:Z为摩擦副的数量;Np为有效摩擦面积占总面积的百分比;ro为摩擦片的外径;ri为摩擦片的内径;μc为摩擦系数;Pe为接触压力;ωrel为主从动摩擦片转差。黏性扭矩Tv是由摩擦面之间的黏性剪切力通过边界油膜传递的扭矩,其计算公式为[16]

式中:ηc为液压油黏度;φf和φfs分别为Patir和Cheng平均流量模型中的流量因数;h为油膜厚度。
2.3 变速齿轮箱模型扭矩辅助型AMT的变速齿轮箱是普通的平行轴齿轮箱,组成部分包含多对齿轮副和同步器。其中齿轮传动模型[17]为

式中:ωB为输入端转速;ωF为输出端转速;ia为变速器速比;TB和TF为输入端转矩和输出端转矩;η为齿轮机械效率。
变速器在工作时,通过对同步器施加作用力完成摘挡和挂挡过程。在同步过程中,同步器传递的扭矩为[18]

式中:μs为同步器同步面摩擦系数;Fs为同步器上的同步换挡;Rsi和Rso分别为同步器摩擦面的工作内径和外径;αs为摩擦面的锥角。
同步时间为

式中:Isi和Iso分别为同步器输入端和输出端转动惯量;ωsi和ωso分别为同步器输入端和输出端角速度;Tsi和Tso分别为同步器输入端和输出端作用转矩。
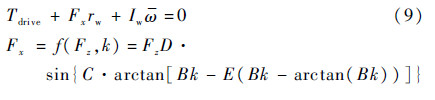
2.4 轮胎模型本文使用“Magic Formula”轮胎模型。图 3为车轮-轮胎受力图,在水平良好路面上滚动的轮胎受到了纵向力和垂直力,Vx为轮胎轮心在前进方向的线速度,ω为轮胎围绕轮心转动的角速度,Fz为轮胎在垂直方向受到的负荷,Fx为轮胎地面接触点纵向力,存在如下力学平衡式[19]:
 |
| 图 3 车轮-轮胎受力图 Fig. 3 Wheel-tire force diagram |
| 图选项 |
式中:Tdrive为车轮驱动转矩;rw为车轮半径;Iw为车轮转动惯量;ω为车轮角加速度;k为车轮滑移率,可由k=Vsx/丨Vx丨得到,其中Vsx为滑移速度,可由式(10)得到;另外4个系数B、C、D和E依据外倾角和垂直作用力决定。
在纵向x方向,轮胎由于受到外力作用,会产生一定程度的滑移,滑移速度为

3 有动力升挡控制策略3.1 控制策略概述在有动力升挡过程中,发动机输出正扭矩,由发动机驱动车辆。其特征为目标挡位增加,油门踏板开度增大,车辆速度增大越过升挡线。升档过程如图 4所示,以1挡升2挡为例,整个升挡过程分为3个阶段:摘挡阶段(从t0到t1)、发动机调速阶段(从t1到t2)和挂挡阶段(从t2到t3)。
 |
| 图 4 升挡过程示意图 Fig. 4 Schematic of upshift process |
| 图选项 |
扭矩辅助型AMT升挡时,起步离合器接合,变速器的输入轴与发动机曲轴刚性连接,且转动惯量较大。由于同步器的扭矩限制,主从动端转速必须精确匹配,再执行升挡;并且换挡过程中滑摩功和冲击度相互影响。因此,制定有动力升挡控制策略,协调控制辅助离合器、发动机和变速器,确保升挡过程迅速、平稳[20]。
3.2 摘挡阶段控制策略摘挡力为零时是变速器的最佳摘挡时机。此时变速器内部的接合齿轮处于零扭矩自由状态,既不传递动力,也不传递阻力。在实际换挡过程中,齿轮传递扭矩较小时,也能顺利摘挡。考虑到传感器精度,设定变速器的最佳摘挡时机为接合齿轮传递扭矩小于10 N·m。传统AMT在换挡时,通过分离离合器切断动力,实现顺利摘挡。对于扭矩辅助型AMT,通过精确控制辅助离合器,使得接合齿轮的扭矩逐渐过渡到辅助离合器,实现顺利摘挡,同时避免传动系统动力中断[21]。
当控制系统发出升挡指令后,增大辅助离合器的压力,辅助离合器的扭矩不断变大,1挡齿轮传递扭矩不断减小。当1挡齿轮传递扭矩接近零时,分离1挡齿轮。此时变速器的输出扭矩为Tout=iaTa+i1T1,其中:Ta为辅助离合器扭矩;i1为1档速比。可得1挡齿轮传递扭矩T1=(Tout-iaTa)/i1。
本文在变速器输出轴上安装了扭矩传感器,可以精确测量变速器输出扭矩Tout。而辅助离合器传递的扭矩Ta可以根据辅助离合器的压力等参数计算得到。结合经验值,设定1挡齿轮分离时的临界条件为丨T1丨=丨(Tout-iaTa)丨/i1≤10。在分离1挡齿轮后,进入发动机调速阶段。
3.3 发动机调速阶段控制策略变速器摘挡后,发动机通过辅助离合器将扭矩传递到车轮。当升挡时,基于当前车速和目标传动比,降低发动机转速,从而实现顺利换挡。由Genise的专利[22]可知,当输出轴转速乘以目标挡位传动比与输入轴转速之差小于20 r/min时为最佳换挡转速。在实际控制中,由于换挡执行机构存在时间滞后,需要提前确定换挡转速值。因此,设定转速之差小于90 r/min为最佳换挡转速。
辅助离合器在传递扭矩的过程中,由于摩擦作用会产生热量。并且换挡过程,冲击度和滑摩功相互影响。为了实现最佳换挡性能,根据刘玺[23]的研究成果,在发动机调速阶段采用二次型最优控制理论进行最优控制,冲击度和滑摩功作为性能指标函数。
由发动机曲轴状态方程Jp*
 e=Te-Ta,可得
e=Te-Ta,可得
式中:Jp*为发动机曲轴转动惯量。
由变速箱输出轴状态方程Jv
v=iaTa-Tl,可得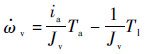
式中:Tl为负载转矩;Jv为变速箱输出轴转动惯量;ωv为输出轴角速度。
取状态变量为
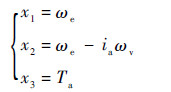
取控制变量为

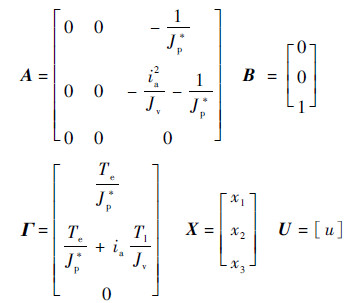
发动机调速阶段的状态方程为

式中:A为状态矩阵;B为控制矩阵;Γ为干扰矩阵。
系统的约束条件为
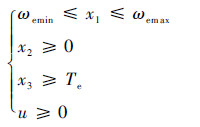
式中:ωemin为发动机最低转速;ωemax为发动机最高转速。
系统的初始条件为
式中:ωe0为调速阶段开始时发动机的转速;ωv0为调速阶段开始时输出轴转速;Te0为调速阶段开始时发动机扭矩。
发动机调速阶段结束时,发动机转速与输出轴转速满足挂挡条件,即输出轴转速乘以目标挡位传动比与输入轴转速之差小于90 r/min,即9.42 rad/s。

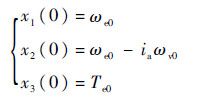
根据发动机调速阶段的动力学方程,可得冲击度j和滑摩功L为
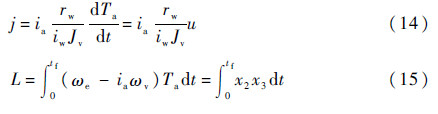
选取发动机调速阶段的最优控制性能指标函数为
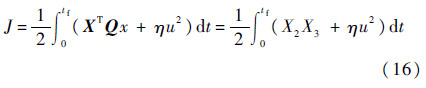
式中:Q为正定加权矩阵。
变速器的输出扭矩为iaTa,其冲击度为

根据状态空间方程,使用变分法求得辅助离合器目标扭矩变化率的最优轨迹为

式中:P(t)、M(t)、h(t)和x(t)为待定系数,可以通过逆推法计算这4个系数,根据辅助离合器目标扭矩的变化率和控制周期,即可求得某周期的辅助离合器目标扭矩变化量,通过迭代运算得出辅助离合器目标扭矩。根据辅助离合器目标扭矩和系统的状态方程,即可求得发动机扭矩和辅助离合器主从动盘转速差等其他状态参数。
3.4 挂挡阶段控制策略当发动机转速降低至2挡对应的目标值后,接合2挡齿轮。然后以适当的速度降低辅助离合器的压力,其传递的扭矩随之减小,2挡齿轮传递的扭矩不断增大,变速器的输出扭矩不断增大。辅助离合器压力下降的速度要适当,既不能过快,也不能太慢。增速过快会引起变速器输出扭矩的迅速下降,导致较大冲击;增速过小会延长换挡时间,加剧辅助离合器的磨损。
4 仿真及试验分析4.1 仿真分析为了验证扭矩辅助型AMT有动力升挡控制策略的有效性,根据整车动力性模型建立仿真模型,进行基于2挡升3挡工况的仿真研究,表 1为整车参数,设定路面附着系数为0.8,风速为2 m/s,汽车空载,油门踏板开度为0.2。图 5为2挡升3挡仿真结果。
 |
| 图 5 2挡升3挡仿真结果 Fig. 5 Simulation results from the second gear to the third gear |
| 图选项 |
表 1 整车参数Table 1 Vehicle parameters
| 参数 | 数值 |
| 质量/kg | 6 500 |
| 轴距/mm | 4 250 |
| 额定功率P/kW (转速/(r·min-1)) | 101(2 500) |
| 最大扭矩Tm/(N·m) (转速/(r·min-1)) | 430(1 500) |
| 变速器传动比 | 6.11,3.39,2.05,1.32,1.00 |
| 倒档传动比 | 5.22 |
| 主减速比 | 4.875 |
| 最高车速/(km·h-1) | 99 |
| 车轮半径/mm | 406 |
| 迎风面积/m2 | 6.5 |
| 风阻系数 | 0.8 |
| 滚阻系数 | 0.008 |
表选项
汽车在10.6 s开始升3挡,进入2挡摘挡阶段。为了顺利摘挡,不断增加辅助离合器传递的压力,2挡齿轮传递的扭矩不断变小,在10.9 s分离2挡齿轮,换挡过程进入发动机调速阶段。通过协调控制发动机和辅助离合器,使得发动机转速不断下降,在11.55 s发动机转速到达3挡对应的目标值,接合3挡齿轮同步器,换挡过程进入摘挡阶段,辅助离合器传递的扭矩不断减小,3挡齿轮传递的扭矩不断增加,当辅助离合器完全分离后,换挡过程结束。
由图 5(a)可知,发动机转速在整个换挡过程中变化比较平稳。由图 5(b)和图 5(c)可知,随着辅助离合器压力的上升,2挡齿轮传递的扭矩不断减小,来自发动机的扭矩由2挡齿轮逐渐向辅助离合器过渡,在10.9 s时,2挡齿轮传递扭矩为0,分离2挡齿轮,换挡过程进入发动机调速阶段。为了降低发动机转速,增大了辅助离合器压力,同时减小了节气门开度,当发动机转速到达3挡对应的转速值时,接合3挡齿轮。辅助离合器压力逐渐下降,3挡齿轮传递的扭矩不断增大,然后进入3挡行驶状态。由图 5(d)可知,在整个换挡过程中,变速器都能输出扭矩,从而避免了动力中断。由图 5(h)可知,挂挡时刻的冲击度最大,因为起步离合器保持接合,变速器输入轴与发动机刚性连接,转动惯量较大,容易产生冲击。但换挡冲击度绝对值的最大值为5.78 m/s3,可以接受,换挡过程基本平顺。
4.2 试验分析为了验证本文制定的换挡控制策略的有效性,在水平沥青路面上进行整车换挡试验,风速为2 m/s,汽车空载,油门踏板开度为0.2,图 6为2挡升3挡的试验结果。为测量变速箱输出轴扭矩和转速,在输出轴安装了扭矩转速传感器,车速由输出轴转速乘以相应系数求得。辅助离合器的压力由压力传感器测量,发动机转速由内置于发动机壳体的转速传感器测量。汽车的纵向加速度由加速度传感器测量,冲击度无法直接测量,由加速度进行微分求解,踏板开度传感器由角位移传感器测量。
 |
| 图 6 2挡升3挡实验结果 Fig. 6 Test results from the second gear to the third gear |
| 图选项 |
在11.1 s,汽车开始由2挡升3挡,此时辅助离合器的压力逐渐上升,辅助离合器传递扭矩不断增大,2挡齿轮传递扭矩不断变小。在11.35 s,2挡齿轮传递扭矩接近零,分离2挡齿轮,进入发动机调速阶段。根据目标传动比控制发动机输出扭矩和辅助离合器扭矩,增大辅助离合器压力,减小发动机节气门开度,从而增大发动机与辅助离合器扭矩之差使得发动机转速不断减小,待发动机转速接近目标转速时适当地减小辅助离合器压力,增大节气门开度,从而一定程度上减小发动机与辅助离合器扭矩值差,使得发动机转速尽可能长时间的维持在目标转速附近,为挂3挡创造条件。到12.1 s时,接合3挡齿轮,然后逐渐降低辅助离合器压力,直至为零,升挡过程结束。
由图 6(b)可知,辅助离合器的实际压力能够较好地跟随目标压力,辅助离合器压力智能控制系统能有效控制压力。由图 6(c)可知,在摘挡和挂挡时刻产生了一定冲击,因为在这2个时间点,变速器的传动比发生改变,容易产生扭矩波动。从图 6(d)可以看出,在换挡过程中变速箱一直输出扭矩,由于辅助离合器传动比较小,因此输出扭矩低于换挡前后的扭矩,但是汽车一直处于加速状态,动力性相对于传统AMT得到较大改善。在整个换挡过程中,冲击度绝对值的最大值为6.85 m/s3,可以接受,换挡过程基本平顺,保证了较好的换挡品质。
5 结 论本文介绍了扭矩辅助型AMT的结构和工作原理,搭建了扭矩辅助型AMT的动力学模型,制定了有动力升档过程的控制策略。基于2档升3档工况,进行了扭矩辅助型AMT的仿真研究和整车试验。仿真和试验结果表明:
1)发动机转速、辅助离合器压力、换挡冲击度及车速信号仿真结果与试验结果接近,本文搭建的扭矩辅助型AMT车辆模型正确。
2)换挡冲击度参数仿真结果最大值为5.78 m/s3,试验结果最大值为6.85 m/s3,在精度允许范围内,满足换挡品质要求。
3)换档过程中有动力输出,换挡冲击度较低。证明本文提出的有动力升档控制策略可有效提高AMT车辆换挡品质。
参考文献
| [1] | 裴栋. 不分离离合器AMT综合控制研究[D].长春:吉林大学,2009:5-9. PEI D.Research on the integrated control of no separated clutch AMT[D].Changchun:Jilin University,2009:5-9(in Chinese). |
| Cited By in Cnki (13) | |
| [2] | GALVAGNO E, VELARDOCCHIA M,VIGLIANI A.A model for a flywheel automatic assisted manual transmission[J].Mechanism and Machine Theory,2009,44(6):1294-1305. |
| Click to display the text | |
| [3] | 杨志刚. 汽车自动变速系统智能控制方法研究[D].重庆:重庆大学,2003:81-98. YANG Z G.Research on the intelligent control method of the automated mechanical transmission of automobile[D].Chongqing:Chongqing University,2003:81-98(in Chinese). |
| Cited By in Cnki (30) | |
| [4] | 张建国. 双离合器式自动变速器控制品质评价与优化[D].长春:吉林大学,2011:55-76. ZHANG J G.Double clutch transmission control quality evaluation and optimization[D].Changchun:Jilin University,2011:55-76(in Chinese). |
| Cited By in Cnki (27) | |
| [5] | 王印束. 基于动力传动系统一体化的双离合器自动变速器控制技术研究[D].长春:吉林大学,2012:49-68. WANG Y S.Study on dual clutch transmission based on integrated powertrain control[D].Changchun:Jilin University,2012:49-68(in Chinese). |
| Cited By in Cnki (13) | |
| [6] | TAGUCHI Y, SOGA Y,MINENO A,et al.Development of an automated manual transmission system based on robust design:SAE 2003-01-0592[R].Detroit:SAE,2003. |
| Click to display the text | |
| [7] | 余志生. 汽车理论[M].北京:机械工业出版社,2004:25-38. YU Z S.Automobile theory[M].Beijing:China Machine Press,2004:25-38(in Chinese). |
| [8] | MANFRED M, HENNING W,陈荫三,等.汽车动力学[M].北京:清华大学出版社,2009:21-45. MANFRED M,HENNING W,CHEN Y S,et al.Vehicle dynamics[M].Beijing:Tsinghua University Press,2009:21-45(in Chinese). |
| [9] | 胡丰宾, 孙冬野,秦大同,等.DCT双离合器联合起步模式建模与仿真[J].江苏大学学报(自然科学版),2010,31(1):19-25. HU F B,SUN D Y,QIN D T,et al.Modeling and simulation for dual clutch launching mode of DCT[J].Journal of Jiangsu University(Natural Science Edition),2010,31(1):19-25(in Chinese). |
| Cited By in Cnki (28) | Click to display the text | |
| [10] | 鲁统利,王衍军. 基于模糊控制的双离合器式自动变速器起步过程仿真研究[J].汽车工程,2009,31(8):746-750. LU T L,WANG Y J.A study on the start process simulation of a dual clutch automatic transmission based on fuzzy control[J].Automotive Engineering,2009,31(8):746-750(in Chinese). |
| Cited By in Cnki (25) | Click to display the text | |
| [11] | ADACHI K, OCHI Y,SEGAWA S,et al.Slip control for a lock-up clutch with a robust control method[C]//SICE 2004 Annual Conference.Piscataway,NJ:IEEE Press,2004,1:744-749. |
| Click to display the text | |
| [12] | BAI S S, MOSES R L,SCHANZ T,et al.Development of a new clutch-to-clutch shift control technology:SAE 2002-01-1252[R].Detroit:SAE,2002. |
| Click to display the text | |
| [13] | 施国标. 电控机械式自动变速器中离合器控制的研究[D].长春:吉林大学,1998:35-49. SHI G B.Research on the clutch control of automated mechanical transmission[D].Changchun:Jilin University,1998:35-49(in Chinese). |
| [14] | 胡宏伟. 湿式自动离合器接合过程特性的研究[D].杭州:浙江大学,2008:25-38. HU H W.Study on the characteristic of automatic wet clutch engagement process[D].Hangzhou:Zhejiang University,2008:25-38(in Chinese). |
| Cited By in Cnki (76) | |
| [15] | 郑磊. 自动变速器的建模与仿真技术研究[D].长春:吉林大学,2011:45-61. ZHENG L.Research on modeling and simulation technology of automatic transmission[D].Changchun:Jilin University,2011:45-61(in Chinese). |
| Cited By in Cnki (10) | |
| [16] | 王印束. 双离合器式混合动力传动系统模式切换品质仿真研究[D].长春:吉林大学,2009:34-51. WANG Y S.Simulation research on the mode switching quality of hybrid powertrain with two clutch[D].Changchun:Jilin University,2009:34-51(in Chinese). |
| Cited By in Cnki (13) | |
| [17] | GOETZ M, LEVESLEY M C,CROLLA D A.Integrated powertrain control of gearshifts on twin clutch transmission:SAE 2004-01-1637[R].Detroit:SAE,2004. |
| Click to display the text | |
| [18] | CHENG X S, LIU X.Research on starting control of wet dual clutch transmission[C]//Proceedings of 2010 International Conference on Computer,Mechatronics,Control and Electronic Engineering (CMCE 2010).Piscataway,NJ:IEEE Press,2010,2:476-479. |
| Click to display the text | |
| [19] | 彼得罗夫B A. 汽车传动系自动操纵的理论基础[M].陆兆风,译.北京:人民交通出版社,1963:23-35. ПЕТРОВ B A.Vehicle drive train automatic control theoretical basis[M].LU Z F,translated.Beijing:China Communications Press,1963:23-35(in Chinese). |
| [20] | VELARDOCCHIA M, D'ALFIO N,BONISOLI E,et al.Block-oriented models of torque gap filler devices for AMT transmissions:SAE 2008-01-0631[R].Detroit:SAE,2008. |
| Click to display the text | |
| [21] | 陈清洪. AMT_DCT自动变速器通用开发平台关键技术研究[D].重庆:重庆大学,2010:45-65. CHEN Q H.The key control technology research of AMT/DCT automatic transmissions universal development platform[D].Chongqing:Chongqing University,2010:45-65(in Chinese). |
| Cited By in Cnki (10) | |
| [22] | MANISH K, TAEHYUN S,YI Z.Shift dynamics and control of dual-clutch transmissions[J].Mechanism and Machine Theory,2007,42(6):168-182. |
| Click to display the text | |
| [23] | 刘玺. 湿式双离合器自动变速器换档关键技术研究[D].长春:吉林大学,2011:35-46. LIU X.The key control technology research of shift process based on wet dual clutch transmission[D].Changchun:Jilin University, 2011:35-46(in Chinese). |
| Cited By in Cnki (15) |
