���շ�Һѹϵͳ��������ʱ,����������ٶ�����صĽ��Ͷ����[9]���������������ʱ�������ϵ��ͨ����1.1~1.3��Χ��[10],���ջ�����ͻ������ļ��������2.0��Ƶ�Һѹϵͳ,�ڳ�����С���ع����¿��ܲ����ϴ����ֹ�ٶȺͳ��,����ؽṹ�������ʩ���ܷ��нϸߵ�Ҫ��ͳ��������շ�Һѹϵͳ��ʹ����ȱ���ɿ���,������Ӧ�����ı仯������������ܵ��������,���������������Ͳ�غ�ͨ�������������Ƕȵ����������,����غɳ������г�ĩ��[11, 12]�����ʵ������˶������ļ��ٶ�,ʹ�˶������ȼ��ٺ���ٵ���̬,���������������ʼ�ε�����Ͳ�غɲ���С�г�ĩ�˵��غ�,ʹ����Ͳ�غ��������г��ϵķֲ����Ӿ���,�������Ͳ��Ч�ʡ�ʵ���������Ҳ��Ҫ������շ�Һѹϵͳ���пɿ��ԡ�
Ŀǰͨ��������������ѧ����,����ģ����Һѹ����������ܵ��շŹ��̡���������[13]ʹ��������շ���άģ�ͺ�Һѹϵͳģ�ͽ������Ϸ���,�о����շ�����Ͳ������������շ����ܵ�Ӱ�졣ӡ����[14]�����˽���շ�Һѹϵͳ������ܶ���ѧ����������ģ��,������������֤�˷���ģ�͵�ȷ��,�о���Һѹϵͳ���ֲ�����������շ����ܵ�Ӱ�졣�����о���֤�˽��Һѹϵͳ��������������ѧ������������շ����ܷ����е�ȷ��,��δ�漰��Һѹϵͳ��ƺ��շ����ܵĸĽ���
���������һ������������ܵĿɿر����շ��������ĸ������,ͨ���ı���ͼ�������·�Ͻ���������������,ʵ����������շ�Һѹϵͳ��ʹ���еĿɿ��ԡ�ʹ��������������ѧ�����о��˲�ͬ���ع����������������Ķ���ѧ���̡��볣��������,��һ�������Լ���¸����˶�������µ���ֹ�ٶȡ�����ѹ����ֵ������Ͳ�غɺͽṹ������ԡ�
1 ������ܿɿر����շ�������1.1 ���������ά�շŻ���������շ�ϵͳ�����շŻ�����Һѹϵͳ���֡�ij�ʹ�����������������ά�շŻ�����ͼ 1��ʾ������������������:���Ƚ�������ͲMN��������,�˷���λ������NS������,ʹ��λ������;Ȼ���շ�����ͲJK�����쳤,ͨ��ҡ��KL��������֧��IO����֮������Ծ�ֹ��Ť���ۡ������˺ͻ��ֵ����(ͼ��ʡ��)���շ�ת��OP��ת,����������Ͳж��;���֧����������λ��,��λ���������շŻ�������Ҫ������� 1��ʾ��
 |
| ͼ 1 ij�ʹ���������������ά�շŻ���Fig. 1 Three-dimensional main landing gear retracting device of a large civil aircraft |
| ͼѡ�� |
�� 1 ��������շŻ�������Ҫ����Table 1 Key parameters of main landing gear retracting device
| �������� | ��ֵ |
| ֧���������㲿��������/kg | 1436.6 |
| ֧�����ľ��շ�ת�����/mm | 2314 |
| ֧������շ�ת����Ծ�/(kg��m 2) | 9124.3 |
| ֧���շ�ת��/(��) | 80.5 |
| ��λ���������ɳ���/mm | 400 |
| ��λ�����ɸն�/(N��m -1) | 8000 |
��ѡ��
1.2 ��������շ�Һѹ������������Ƹ��ݸû��͵ļ���Ҫ��,�����������ʱ��Ӧ��11 s����,���������ʱ��������Ϊ2.0,Һѹϵͳ����ѹ��Ϊ20.6 MPa��������Ƶ���������շ�Һѹ������ԭ����ͼ 2��ʾ�����е��������o1Ϊ���ͽ���,�ɱ���������̳�ʼ������Ͳ�ڳ��ֹ��ߵij��ѹ����ֵ��������o3������Ͻ�����o2�Ľ������,���������95%������Ͳ�г̿�ʼ,����������1%���г�����ס������o3����·�����ַ��,ʹ��Һ���ӽ�����o2����,����и�ǻѹ��,����������̵���ֹ�ٶȡ����������o4��o5������ܷ���ʱ���������,�Կ��Ʒ����ٶȡ����շ�Һѹ����������Ҫ������� 2��ʾ��
 |
| sa���շ�����Ͳλ��;Fa���շ�����Ͳ�������; pp���շ�����Ͳ����ѹ��;pb���շ�����Ͳ����ѹ��; p1���շ�����Ͳ��ǻѹ��;p2���շ�����Ͳ�и�ǻѹ��; q1����ǻ�����������;q2���и�ǻ������������ͼ 2 ��������շ�Һѹ������Fig. 2 Hydraulic operating actuator of main landing gear |
| ͼѡ�� |
�� 2 ��������շ�Һѹ����������Ҫ����Table 2 Key parameters of main landing gear hydraulic operating actuator
| �������� | ��ֵ |
| �շ�����Ͳ����г� s amax/mm | 282.7 |
| ����Ͳ����ֱ�� D p/mm | 148.0 |
| ����Ͳ������ֱ�� D r/mm | 98.0 |
| ��ǻ��Ч������� A 1/mm 2 | 17203 |
| �и�ǻ��Ч������� A 2/mm 2 | 9660 |
| ������ o 1��Խ���� r 1(ʵ�ʽ����= r 1 A 1) | 0.0004 |
| ������ o 2��Խ���� r 2(ʵ�ʽ����= r 2 A 2) | 0.0002 |
| ������ o 3��Խ���� r 3(ʵ�ʽ����= r 3 A 2) | 0.0018 |
| ����ѹ�� p p/MPa | 20.6 |
| ����ѹ�� p b/MPa | 0.4 |
��ѡ��
1.3 ��������շ�Һѹ�������ɿر�������ڸ��շ�Һѹ������������ƵĻ�����,���һ���ܹ���Ӧ��ͬ���ع����Ŀɿر����շ��������ĸ������,��ԭ����ͼ 3��ʾ������ʹ�õ�˫�������������������ͨ���������Ƶ�����-ѹ������,��ѹ��һ��ʱ���������ֵ�������Ա仯,����ֵһ��ʱ������ѹ���ƽ�������Ƴ�����[15],��˿���Ϊ����������������ϵ���������ij˻������ֵ�����Թ�ϵ��ͨ��������������ܰ�װλ�õ����Լ��ٶȼ�,�����������������������ܵĴ������,���ݹ��ص��ڱ����������Ŀ���ֵ,����ʵ�ֶ�����������ٶȵĿ��ơ���������������˶��Էɻ�������ٶȵ�Ӱ���С,�Ҷ�������ʱ�ľ���Ҫ��,����ϵͳ�����Ϊ����ϵͳ,�ṹ������������o1�����Ը�������ܷ���ʱ�Ĺ�������,�Ӷ�ʡȥ�˵��������o5���ñ�����Ƶ�����Ͳ��ԭ�����ͬ,�������������ĵ��ڹ��ɡ�������o3�Ľ����������ѹ��pp��Ҫ��������������ܷ����Ļ�����ȷ����
 |
| ͼ 3 ������ܿɿر����շ�������Fig. 3 Controllable operating actuator of main landing gear |
| ͼѡ�� |
2 �������������ѧ��ģ�����2.1 �������������ѧ����ģ���շŻ����Ķ���ģ�ͺ�Һѹϵͳģ��ͬ������������շ�ϵͳ�Ķ���ѧģ�͡���������������ϵͳ�������µĶ���ѧ����:
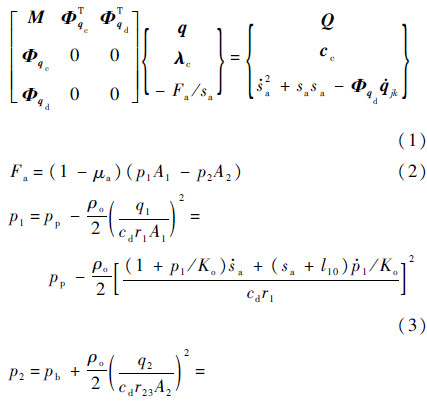
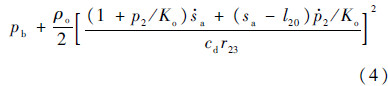
ʽ��:MΪ��������;��qcΪ�˶������ſɱȾ���;��qdΪ�շ�����Ͳλ��Լ�����ſɱȾ���;qΪ������ٶ�����;qjkΪ�շ�����Ͳ��Ͳ�ͻ�����ƽ��������������;��cΪ�˶������������ճ�������;QΪ���������������������˶���Ħ��������λ���������ͽ������Լ��ٶ���صĹ������Ĺ���������;ccΪ���ٶ�Լ���ַ��̵��Ҳ���;��aΪ�շ�����Ͳ��Ħ��ϵ��;l10��l20�ֱ�Ϊ��ǻ���и�ǻ��Һ�ij�ʼ���ȣ���oΪ��ѹ����Һ���ܶ�;KoΪ��Һ���������ģ��;cdΪ�����ͽ�����������ϵ��;r23Ϊ�и�ǻ��������Ч��Խ����֮�͡�
�����������շ�ϵͳģ��,ʹ�����������������������������������ѧ����ģ��,����ʹ�õ���Ҫ������� 3��ʾ��
�� 3 �������������ѧ����ģ�͵���Ҫ����Table 3 Key parameters of dynamic simulation model of main landing gear retraction
| �������� | ��ֵ |
| ������ F dmax/N | 2334 |
| ������ F u/N | 2000 |
| ����������ʱ�� t u/s | 2.0 |
| �˶���Ħ��ϵ�� �� j | 0.1 |
| �շ�����ͲĦ��ϵ�� �� a | 0.1 |
| ��ǻ��Һ��ʼ���� l 10/mm | 30 |
| �и�ǻ��Һ��ʼ���� l 20/mm | 300 |
| ��ǻ��ʼѹ�� p 10/MPa | 1.0 |
| �и�ǻ��ʼѹ�� p 20/MPa | 0.4 |
| ��ѹ����Һ�ܶ� �� o/(kg��m -3) | 900 |
| ��Һ�������ģ�� K o/MPa | 1700 |
| ������/������ϵ�� c d | 0.62 |
��ѡ��
2.2 ��������շ��������������������������ʱ�������nz���ֺ㶨,ȡnz=1.0��2.0��6�鹤��,����ѹ��pp=20.6 MPa���շ�Һѹ���������ó�����Ƶ�������������������ͼ 4��ͼ 7�ͱ� 4��ʾ��
 |
| ͼ 4 ������Ʋ�ͬ���ع�����֧�����շ�ת����ٶ�Fig. 4 Strut rotational speed of conventional design under different load factors |
| ͼѡ�� |
 |
| ͼ 5 ������Ʋ�ͬ���ع���������Ͳ��ǻ���и�ǻѹ��Fig. 5 Actuator cylinder pressure and back pressure of conventional design under different load factors |
| ͼѡ�� |
 |
| ͼ 6 ������Ʋ�ͬ���ع���������Ͳ����Fig. 6 Actuator force of conventional design under different load factors |
| ͼѡ�� |
 |
| ͼ 7 ������Ʋ�ͬ���ع���������Ͳ���仯��Fig. 7 Actuator force derivative of conventional design underdifferent load factors |
| ͼѡ�� |
�� 4 ������Ʋ�ͬ���ع�������������������Table 4 Landing gear retraction simulation results of conventional design under different load factors
| ���� | n z | |||||
| 1.0 | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | |
| ������ʱ t r/s | 7.273 | 7.63 | 8.085 | 8.668 | 9.5 | 11.01 |
| ֧����ֹ���ٶ� �� r/(rad��s -1) | 0.104 | 0.094 | 0.083 | 0.07 | 0.055 | 0.033 |
| �и�ǻ���ѹ�� p 2max/MPa | 15.99 | 13.92 | 11.82 | 9.26 | 6.63 | 3.77 |
| ����Ͳ������� F amax/kN | 204.6 | 228 | 251.6 | 275 | 299.1 | 332.1 |
| �����仯������ֵ F a+/(10 6N��s -1) | 4.773 | 4.006 | 3.112 | 2.394 | 1.538 | 0.856 |
| �����仯�ʸ���ֵ F a��/(10 6N��s -1) | 4.34 | 3.545 | 3.536 | 2.156 | 1.993 | 2.02 |
| ����������� q 1max/(L��s -1) | 0.909 | 0.903 | 0.897 | 0.891 | 0.885 | 0.879 |
��ѡ��
�ɷ������ɼ�,������������������ʱ����ص����Ӷ�����,֧����ֹ���ٶ�����ص����Ӷ���С���������Ҫ��,Ӧ��֤�������Ĺ�����������ܹ���ָ����ʱ��������,�ݴ˵��ڵĽ������ᵼ��С���ع�����֧����ֹ���ٶȽϴ�,�����Ҫ����ĩ�˽�����ĩ�˽���ʹ����Ͳ�����Ϳ������С,�Ӷ���С��ֹ�ٶ�,Ȼ��ĩ�˽���ʹ����Ͳѹ��ͻȻ����,���Һѹ���,����Ͳ���������ͻ��Ҳ�Խṹ���������������Ͳ���������ʱ��ı仯�ʷ�ӳ�ṹ����ij̶�,�ɼ�Һѹ�ͽṹ����ij̶�����صļ�С������
3 �����շ�����������ȷ�������3.1 �����շ���������������������ݳ�����Ƶ��շ�Һѹ�������ڲ�ͬ���ع����µ�����,�����շ��������б����������Ľ����Ӧ����صļ�С����С,ʹ�ò�ͬ���ع����������������ʱ���,�Ӷ�����С���ع����µ���ֹ�ٶȡ�Ӧ��Сr3��r2֮��,�Խ���ĩ�˽�����ɵij����ȡpp=20.6 MPa,r3=0.000 15,r1��r2����صı仯��ͼ 8��ʾ��Ϊ�˷���Ա�,�˴�r1��r2��ʾ�����������Ľ������õ�ЧΪ����ϵ��Ϊ0.62�Ľ�����ʱ�ĵ�Ч��Խ����,r1=r2+r3��������Ƶķ�������ͼ 9��ͼ 12�ͱ� 5��ʾ��
 |
| ͼ 8 pp=20.6 MPa�ı������r1��r2����صı仯Fig. 8 Variable design (pp=20.6�BMPa) parameters r1 and r2 as functions of load factors |
| ͼѡ�� |
 |
| ͼ 9 ������Ʋ�ͬ���ع�����֧�����շ�ת����ٶ�Fig. 9 Strut rotational speed of variable design under different load factors |
| ͼѡ�� |
 |
| ͼ 10 ������Ʋ�ͬ���ع���������Ͳ��ǻ���и�ǻѹ��Fig. 10 Actuator cylinder pressure and back pressure of variable design under different load factors |
| ͼѡ�� |
 |
| ͼ 11 ������Ʋ�ͬ���ع���������Ͳ����Fig. 11 Actuator force of variable design under different load factors |
| ͼѡ�� |
 |
| ͼ 12 ������Ʋ�ͬ���ع���������Ͳ���仯��Fig. 12 Actuator force derivative of variable design under different load factors |
| ͼѡ�� |
�ɱ� 5�ɼ�,������ܿɿر����շ�����������ڸ������µ����������ʱ�����11 s���ҡ�����ڳ������,����������й����µ������ֹ���ٶȽ�����19%,�и�ǻ���ѹ��������17%,�����仯���������ֵ������79%,�����仯�����ֵ������49%,���������������������3.2%���ɼ�������ܱ����շ��������ܹ���Ч�������������ʱ֧������λ���ij����ĩ�˽�����ɵ�Һѹ�ͽṹ�����
�� 5 pp=20.6 MPa�ı�����Ƶ���������������Table 5 Landing gear retraction simulation results of variable design (pp=20.6 MPa)
| ���� | n z | |||||
| 1.0 | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | |
| t r/s | 10.89 | 10.92 | 10.91 | 10.92 | 10.96 | 11.01 |
| �� r/(rad��s -1) | 0.084 | 0.082 | 0.079 | 0.074 | 0.065 | 0.046 |
| p 2max/MPa | 13.32 | 12.05 | 11.91 | 11.87 | 11.8 | 11.68 |
| F amax/kN | 168.6 | 199.6 | 232.8 | 265.8 | 298.9 | 331.8 |
| F a+/(10 6N��s -1) | 0.959 | 0.976 | 1.0 | 1.011 | 1.016 | 0.975 |
| F a��/(10 6N��s -1) | 1.767 | 1.822 | 1.893 | 1.978 | 2.065 | 2.192 |
| q 1max/(L��s -1) | 0.643 | 0.667 | 0.699 | 0.738 | 0.791 | 0.880 |
��ѡ��
3.2 �����շ������������Է�������Ӱ����r1=kio(r2+r3),����kioΪ����Ͳ�������������������֮��,�������Ϊkio=1.0�������������kioȡ����ֵ����ƱȽ�,nz=1.2�Ĺ����µķ������Ա���� 6��ʾ��
�� 6 kioȡ��ֵͬʱnz=1.2�����ķ������Ա�Table 6 Simulation results (nz=1.2) comparison of variable designs with different kio
| ���� | k io | ||
| 1.0 | 2.0 | 0.5 | |
| r 1 | 0.000 33 | 0.000 49 | 0.000 275 |
| r 2 | 0.000 18 | 0.000 095 | 0.000 4 |
| t r/s | 10.92 | 11.01 | 11.04 |
| �� r/(rad��s -1) | 0.082 | 0.052 | 0.103 |
| p 2max/MPa | 12.05 | 23.43 | 4.87 |
| F amax/kN | 199.6 | 199.6 | 199.6 |
| F a+/(10 6N��s -1) | 0.976 | 1.058 | 0.878 |
| F a��/(10 6N��s -1) | 1.822 | 2.276 | 1.604 |
| q 1max/(L��s -1) | 0.667 | 0.821 | 0.613 |
��ѡ��
�ɱ� 6�ɼ�,kio=2.0�������Ȼ��ֹ�ٶ����kio=1.0�����Ҫ��,���и�ǻѹ����ֵ����,�ṹ�������������Ҳ����;kio=0.5�������Ȼ�и�ǻѹ�����ṹ�����������kio=1.0������Ե�,����ֹ�ٶȽϴ�,���糣����ơ����,ȡ�м�ֵkio=1.0�ı����շ�����������Ǻ��ʵġ�
4 �����շ����������ܸĽ���Ա�4.1 �������������õı����շ�������������������շ������������ѡ������ѹ��ʱ��Ȼ�������ع�����������ܹ���11 s��������Ϊ��������������ѹ��,����Ҫ�����������������Լ�С�շ�����Ͳ�г�ĩ�������������ȡpp=19.0 MPa,r3=0.000 15,����Ƶı����շ�������r1��r2����صı仯��pp=20.6 MPa����ƵĶԱ���ͼ 13��ʾ��pp=19.0 MPa�ı�����Ƶķ�������� 7��ʾ��
 |
| ͼ 13 ��ͬ����ѹ���ı������r1��r2��nz�ı仯Fig. 13 Comparison of r1 and r2 as functions of nz between variable designs based on different input pressures |
| ͼѡ�� |
�� 7 pp=19.0 MPa�ı�����Ƶ���������������Table 7 Landing gear retraction simulation results of variable design (pp=19.0 MPa)
| ���� | n z | |||||
| 1.0 | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | |
| t r/s | 11.05 | 11.04 | 11.05 | 11.06 | 11.01 | 4.356 |
| �� r/(rad��s -1) | 0.083 | 0.081 | 0.077 | 0.069 | 0.053 | 0.012 |
| p 2max/MPa | 11.24 | 11.19 | 11.12 | 11.04 | 10.89 | 7.77 |
| F amax/kN | 167.5 | 199.5 | 232.7 | 265.8 | 298.7 | 323.3 |
| F a+/(10 6N��s -1) | 0.77 | 0.782 | 0.799 | 0.808 | 0.791 | 1.507 |
| F a��/(10 6N��s -1) | 1.421 | 1.482 | 1.548 | 1.63 | 1.736 | 1.527 |
| q 1max/(L��s -1) | 0.632 | 0.663 | 0.699 | 0.751 | 0.837 | 2.528 |
��ѡ��
�ɱ� 7�ɼ�,nz=1.0~1.8�Ĺ�������ֹ�ٶȡ��и�ǻ���ѹ���ͽṹ������pp=20.6 MPa �ı��������������,��nz=2.0�Ĺ�������Ͳ��������ȳ�����ƽ�����2.6%,�������仯������ֵ�ϴ�,����Ҫ�����������ܴ�
4.2 pp=19.0 MPa������ƵĸĽ�������Ա�����һ�����շ�����Ͳ������λ�ƴ�����,ʹr1�ܹ��������ع��������շ�����Ͳ�г���������,����Խ��ͽṹ���������������ȡr1=0.001 5 sa/samax+0.000 2,r2=0.002 85,�Ľ����pp=19.0 MPa�ı��������֮ǰ���������nz=2.0�����µķ������Ա���ͼ 14��ͼ 17�ͱ� 8��ʾ��
 |
| ͼ 14 ��ͬ�����nz=2.0�����µ�֧����ת���ٶȶԱ�Fig. 14 Strut rotational speed comparison of different designs (nz=2.0) |
| ͼѡ�� |
 |
| ͼ 15 ��ͬ�����nz=2.0�����µ�����Ͳѹ���Ա�Fig. 15 Actuator cylinder pressure and back pressure comparison of different designs (nz=2.0) |
| ͼѡ�� |
 |
| ͼ 16 ��ͬ�����nz=2.0�����µ�����Ͳ�����Ա�Fig. 16 Actuator force comparison of different designs (nz=2.0) |
| ͼѡ�� |
 |
| ͼ 17 ��ͬ�����nz=2.0�����µ�����Ͳ���仯�ʶԱ�Fig. 17 Actuator force derivative comparison of different designs (nz=2.0) |
| ͼѡ�� |
�� 8 ��ͬ�����nz=2.0�����µķ������Ա�Table 8 Simulation results (nz=2.0) comparison of different designs
| ���� | p p=20.6 MPa | p p=19.0 MPa | ||
| ���� | ���� | ���� | �Ľ� | |
| t r/s | 11.01 | 11.01 | 4.356 | 6.533 |
| �� r/(rad��s -1) | 0.033 | 0.046 | 0.012 | 0.021 |
| p 2max/MPa | 3.77 | 11.68 | 7.77 | 0.97 |
| F amax/kN | 332.1 | 331.8 | 323.3 | 323.1 |
| F a+(10 6N��s -1) | 0.856 | 0.975 | 1.507 | 0.678 |
| F a��/(10 6N��s -1) | 2.02 | 2.192 | 1.527 | 1.106 |
| q 1max/(L��s -1) | 0.879 | 0.880 | 2.528 | 1.139 |
��ѡ��
�ɽ���ɼ�,�Ľ���ı�������������ع����¿ɱ���֧�����ٶ������������ƽ�ȱ仯,��������������ͽṹ������ԭ��pp=19.0 MPa�ı�����ƴ�͡���ȳ������,���й����µ������ֹ���ٶȽ�����20%,�и�ǻ���ѹ��������30%,����Ͳ�������������2.7%,�����仯���������ֵ������83%,�����仯�����ֵ������60%,�����������������������25%��
5 ����1) ������ܿɿر����շ��������ܹ���Ӧ���������ʱ��ͬ�Ĵ�����ء���ȳ������,����������й��ع����µ������֧�������ֹ���ٶȽ�����19%,�շ�����Ͳ�и�ǻ���ѹ��������17%,����Ͳ���仯���������ֵ������79%���ɿر����շ���������Ч���������������ʱ֧������λ���ij����ĩ�˽�����ɵ�Һѹ�ͽṹ�����
2) ���ڱ����շ����������,��ͬһ������ʹ����Ͳ�и�ǻ����ǻ��������Խ�������,�ɻ�ú��ʵ���ֹ�ٶȡ��ṹ�������������������ָ�ꡣ
3) ��ǻ��������Խ�����������ع��������շ�����Ͳ�г��������ӵĿɿر����շ���������ƿɽ�һ����������Ͳ�غɺͳ��,���������������Ҳ���ɿر����շ�������������ѹ���Ϳ��Ʒ�����ѡ��Ӧ�ۺϿ���������������ܡ�ҺѹԴ�������ƺͿ���ϵͳ���ӳ̶ȵȶ�����ء�
�����
| [1] | ���в�,��ռ��,�ڵ»�,��.�ɻ������Һѹϵͳ�Ľ������[J].������Һѹ,2002,30(4):179-180. TANG Y C,WANG Z Y,YU D H,et al.Designing of save energy in hydraulic system for aircraft landing gear[J].Machine Tool & Hydraulics,2002,30(4):179-180(in Chinese). |
| Cited By in Cnki (1) | |
| [2] | ����,���Ƿ�,������.AMESim���漼���ڷɻ�Һѹϵͳ�е�Ӧ��[J].�������������,2006,15(2):42-45. GUO J,WU Y F,CHU N S.Application of AMESim in aircraft hydraulic system[J].Computer Aided Engineering,2006,15(2):42-45(in Chinese). |
| Cited By in Cnki (36) | Click to display the text | |
| [3] | ��ǿ,�ڻ�,ͯ����.ij�ͷɻ�������շŹ��̷���[J].���崫�������,2009,7(2):29-31. ZHANG Q,YU H,TONG M B.Simulation of extending and retracting process for aircraft landing gear[J].Fluid Power Transmission and Control,2009,7(2):29-31(in Chinese). |
| Cited By in Cnki (19) | Click to display the text | |
| [4] | �ڷ�Բ,����,����.�����Һѹ�շ�ϵͳ��ģ����Ϸ���[J].Һѹ������,2013,37(4):45-48. YU F Y,GAO Y,CHENG Z.Modeling and fault simulation of landing gear retraction system[J].Chinese Hydraulics & Pneumatics,2013,37(4):45-48(in Chinese). |
| Cited By in Cnki (5) | |
| [5] | �����,����,������,��.�ɻ�������շ�Һѹϵͳ���������ά��Ӧ��[J].Һѹ������,2013,37(6):87-90. ZHU W F,LI X D,DING W Y,et al.Simulation and maintenance of aircraft landing gear hydraulic system[J].Chinese Hydraulics & Pneumatics,2013,37(6):87-90(in Chinese). |
| Cited By in Cnki (3) | |
| [6] | ��ϲƽ,�ܻ�,½��,��.�ɻ�ǰ������շŻ�·Һѹ����Ӱ���о�[J].���崫�������,2013,11(3):17-19. HUANG X P,ZHOU H,LU B,et al.Study of the effect of hydraulic damping on nose landing gear in the retraction/extension circuit[J].Fluid Power Transmission and Control,2013,11(3):17-19(in Chinese). |
| Cited By in Cnki | Click to display the text | |
| [7] | �,����,κС��,��.�ɻ�������շ�Һѹϵͳ��ơ�������ʵ����֤[J].�Ͼ����պ����ѧѧ��,2014,46(2):225-231. LI C,ZHANG M,WEI X H,et al.Design,analysis and experimental validation for hydraulic extension/retraction system of aircraft landing gears[J].Journal of Nanjing University of Aeronautics and Astronautics,2014,46(2):225-231(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [8] | ����,Ф��,���.���ͷɻ�������շſ���ϵͳ����[J].�������պ����ѧѧ��,2013,39(5):595-599. TU Y,XIAO X,LI N.Computer analysis of large-scale aircraft landing gear retraction and extension control system[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(5):595-599(in Chinese). |
| Cited By in Cnki (7) | Click to display the text | |
| [9] | ����.ij�Ϳͻ���������շŶ���ѧ���������鷽���о�[D].�Ͼ�:�Ͼ����պ����ѧ,2012:38-39. FAN R.Analysis and test for retraction-extension dynamic performance of a civil aircraft main landing gear[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012:38-39(in Chinese). |
| Cited By in Cnki | |
| [10] | ������,���ٽ�,�ܾ���,��.��������غ��ױ��Ʒ���[J].�������պ����ѧѧ��,2013,39(5):621-625. LIU X M,WAN S J,XIONG J J,et al.New approach for generating flight load spectrum of civil aircraft[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(5):621-625(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [11] | KNOWLES J A C,KRAUSKOPF B,LOWENBERG M.Numerical continuation analysis of a three-dimensional aircraft main landing gear mechanism[J].Nonlinear Dynamics,2013,71(1-2):331-352. |
| Click to display the text | |
| [12] | �Ʒ���,����,��Զ��.����������ά�շŻ������շŻ�еЧ�ʷ���[J].�����������,2013,33(S1):188-191. HUANG F L,LI S,WANG Y D.Study of mechanical efficiency of a civil aircraft's three dimensional landing gear operation mechanism[J].Journal of Vibration,Measurement and Diagnosis,2013,33(S1):188-191(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [13] | ������,����,�����.ij�ͷɻ�������շŻ������ܷ���[J].������ָ�ӿ���,2012,37(3):169-173. JI G M,DONG M,FU Z J.Performance simulation of retraction/extension mechanism of a certain aircraft[J].Fire Control & Command Control,2012,37(3):169-173(in Chinese). |
| Cited By in Cnki (6) | Click to display the text | |
| [14] | ӡ��,����,κС��,��.������Ӱ���µ�������շ�ϵͳ���ܷ���[J].�������պ����ѧѧ��,2015,41(5):953-960. YIN Y,NIE H,WEI X H,et al.Retraction system performance analysis of landing gear with the influence of multiple factors[J].Journal of Beijing University of Aeronautics and Astronautics,2015,41(5):953-960(in Chinese). |
| Cited By in Cnki | |
| [15] | Bosch Rexroth Group.2-way proportional throttle valve for block installation[EB/OL].Lohr am Main:Bosch Rexroth Group,2007[2014-12-01].http://www.boschrexroth.com/RDSearch/rd/r_29209/re29209_2007-04.pdf. |
| Click to display the text |
