基于此想法,研究者们大胆地提出了两种旨在实现地月(或星际之间)物资转移的绳系卫星系统构想,一种构想源自于TUI公司的Robert,他在1980年就首次提出了一种动量交换/电动绳系(Momentum-Exchange/Electrodynamic Reboost tethers,MXER)卫星推进系统[8].MXER采用动量交换原理,结合电动绳的变轨原理实现载荷的轨道转移.另一种构想来自于英国谢菲尔德大学的Cartmell教授,他在MXER的基础上创造性地提出了驱动型动量交换绳系(Motorized Momentum Exchange Tether,MMET)卫星[9, 10]的概念.MXER系统由母星、子星(或载荷)以及一根连接母星与子星的电动绳组成,主要通过母星与子星之间的动量交换(具体来说是将母星的动量转移给子星,从而增加子星的动量以此来实现子星的轨道转移).该系统一次只能转移一个载荷,此外,由于母星损失了一部分动量,将面临一个长时间进行轨道调整的过程.而MMET不同于MXER,Cartmell在MXER的基础上将母星置于系统质心处,由两根等长的系绳分别连接两套相同的抓捕机构,由两套抓捕机构对两个需要进行轨道调整的载荷实行抓捕.这样,MMET系统就能通过改变两个载荷之间的动量,从而实现其中一个载荷升轨、另一个载荷降轨的星际双向轨道转移的目的.
在对MMET近二十多年的研究中,许多研究者对MMET开展了广泛的理论与实验研究,对MMET理论的发展做出了巨大的贡献.其中,Ziegler和Cartmell通过将系绳简化为刚性杆模型对MMET系统的动力学进行了初步研究[11, 12],同时,他们也针对性地开展了一些地面模拟实验,得到了一些有价值的数据.除此之外,Chen、Ismail等在Ziegler等的研究基础上将系绳的柔性加入到了MMET系统动力学模型中[13, 14, 15],在两端固定的假设下,将系绳的横向振动(二维、三维模型)、纵向振动(二维、三维模型)、侧向振动(三维模型)作为广义坐标引入到动力学模型中.但是,他们均未考虑系统存在结构偏差(即母星两侧系绳的长度存在偏差以及两载荷之间的质量存在偏差等)对MMET系统动力学特性的影响.
由于MMET旨在利用系统的对称性,同时实现两个载荷的轨道转移.因此,MMET系统要想准确实现两载荷的轨道转移,必要前提就是保证系统两端结构的对称性以维持母星的轨道稳定.但是,在实际工程应用中,误差的存在不可避免,因此,分析系统结构误差对系统动力学的影响十分必要.本文在前人研究的基础上,首先采用传统拉格朗日(Lagrange)方法,考虑系绳长度以及载荷质量存在偏差,建立连续地月转移系统(Continuous Cislunar Payload Transfer System,CCPTS)误差动力学模型.同时,在建模过程中,本文在不影响系统模型精度的情况下,采用泰勒级数展开的方式对MMET系统势能进行相应简化.此外,针对所建立的动力学模型,对母星两端系绳的长度的误差、两载荷的质量偏差以及综合误差对CCPTS的动力学特性的影响进行深入分析.经过仿真分析,得出不同程度的误差大小与系统质心轨道特性的影响程度之间的关系,并为如何解决系统结构偏差以及减小因系统结构偏差对系统轨道所造成的影响提出一些建议.
1 CCPTS概念CCPTS包括两套长期驻轨的子系统:一套子系统称为驻地载荷转移系统(Earth Motorized Momentum Exchange Tether,EMMET),运行于地球某椭圆轨道上;另一套子系统运行于月球某椭圆轨道上,称为驻月载荷转移系统(Lunar Motorized Momentum Exchange Tether,LMMET).两套系统工作原理相似,MMET示意图如图 1所示.
 |
| 图 1 MMET示意图Fig. 1 Schematic of MMET |
| 图选项 |
由图 1可知,CCPTS由如下几部分组成:母星系统(包括制导控制系统、定子、转子等)、推进绳(与转子相连,由转子的旋转带动系绳的旋转)、抓捕机构、悬臂梁平衡系统(与定子相连,主要控制CCPTS的旋转面的朝向稳定与平衡).CCPTS进行载荷转移的过程示意图如图 2所示.图中,l为系绳的长度,vM为母星的轨道速度.首先,MMET通过调整系绳的旋转角速度,使得当系统质心运行到轨道近地点时,两抓捕机构的位置正好位于系统质心与地心的连线上.同时,空天飞行器将需要送往月球的载荷P1送入到此时处于低轨端的抓捕机构处,并与抓捕机构实现对接,来自月球的载荷P2也同时到达处于高轨端的抓捕机构处并与该抓捕机构实现对接.这两个过程必须同时进行,以保证对接前后CCPTS质心的轨道参数不发生较大变化,如图中过程①所示;图中②表示CCPTS进行轨道调整的过程.在载荷交会对接的过程中必然会对母星(即系统质心)的轨道参数产生影响,因此需要对CCPTS质心轨道进行调整;此外,要实现载荷P1、P2的准确入轨(即P1进入设计的地月转移轨道,P2进入低地球轨道并由空天飞行器带回地面),CCPTS转子就必须提供合适的驱动力矩,当系统完成n+1/2(n为正整数)个轨道周期之后,载荷P1、P2均获得了实现精确入轨的轨道速度且位置互换;图中③表示载荷P1、P2与各自的抓捕机构同时实现分离.
 |
| 图 2 CCPTS进行载荷转移过程示意图Fig. 2 Process schematic of transferring payloads by CCPTS |
| 图选项 |
2 CCPTS二维刚性动力学模型2.1 坐标系定义1) 惯性坐标系OEXYZ.
坐标原点OE为地球质心,OEX轴指向春分点,OEY轴位于地球赤道面内并垂直于OEX,OEZ轴与OEX轴、OEY轴构成右手系并指向地球北极,3个轴方向上的单位矢量分别为I、J和K.
2) 运动坐标系OMxoyozo.
原点定义在CCPTS质心OM(后文均以OM代表母星)处,OMxo轴位于轨道面内,由地心指向CCPTS质心方向,OMyo轴垂直于OMxo并位于轨道面内,OMzo与OMxo、OMyo构成右手坐标系,3个轴方向上的单位矢量分别为ro、θo和no;惯性坐标系与运动坐标系之间的相对关系如图 3所示.
 |
| Ω—赤经;i—轨道倾角;ω—近地点幅角; θ—真近角;RM—母星质心矢径.图 3 惯性坐标系与运动坐标系Fig. 3 Inertial frame and motion coordinate |
| 图选项 |
3) 轨道面坐标系OEXoYoZo.
坐标原点位于地心(即地球质心),OEXo轴指向CCPTS系统轨道近地点(perigee)方向,OEYo轴位于轨道面内垂直于OEXo(位于CCPTS运行方向一侧),OEZo与OEXo、OEYo构成右手坐标系,3个轴方向上的单位矢量分别为i、j和k.
4) 体轴坐标系OMxbybzb.
OMxb由低轨载荷(lower payload)指向高轨载荷(upper payload),OMyb位于轨道面内,垂直于OMxb,OMzb轴与OMxb、OMyb构成右手坐标系.3个轴方向上的单位矢量分别为$\bar i$、$\bar j$和$\bar k$;轨道面坐标系与体轴坐标系的几何关系如图 4所示.
 |
| mP1,mP2—载荷P1、P2的质量;l1,l2—系绳T1和T2的长度;x—系绳质量单元与母星的距离;mM—母星质量;Ψ—系绳展长方向与当地重力梯度方向夹角;dm—质量微元.图 4 轨道面坐标系与体轴坐标系Fig. 4 Orbital plane coordinate and body coordinate |
| 图选项 |
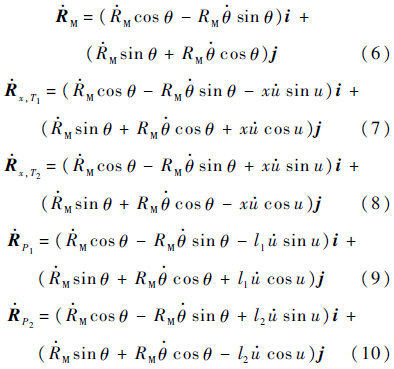
2.2 建立动力学模型假设CCPTS驻地系统运行在以地球为中心的椭圆轨道上,半长轴为a,离心率为e,不考虑系绳的面外运动,即系绳的旋转面与轨道面重合,同时不考虑系绳的柔性.基于以上假设,在轨道面坐标系中,可以表示出母星OM、质量微元dm及载荷P1、P2相对于轨道面坐标系的位置矢量分别为

式中:u=ψ+θ.
由于轨道面坐标系为相对惯性系,因此其各坐标轴方向向量i、j和k均为常值,各自的导数为零,由此得到各单元的速度矢量表达式为
假设系绳的密度为ρ,系绳的横截面积为A,于是得到CCPTS平动动能Ttrans为
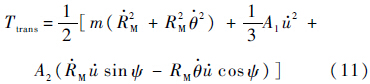
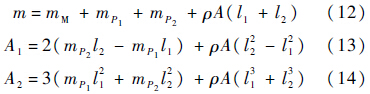
式中:m为CCPTS总质量,m、A1和A2的表达式为
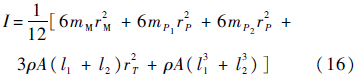
假设载荷、母星、系绳均为圆柱体,各自的尺寸半径分别为rP、rM和rT,载荷及母星的尺寸高度为hP和hM,于是得到CCPTS绕各自质心的转动动能Trot为

式中:I为CCPTS的部分转动惯量,表达式为
联立式(11)和式(15)得到CCPTS的动能T为

式中:$\tilde I$为CCPTS在轨道面内总的转动惯量,其表达式为
求解CCPTS势能函数V,由于不考虑系绳的弹性势能,因此,系绳势能仅由重力产生.由图 4可得CCPTS各部分的势能为
式中:μ为地球引力常数,其取值见第3节.在满足动力学研究精度的前提下,为了简化分析,对式(20)~式(23)采用泰勒级数展开,并略去x/RM、l1/RM、l2/RM二次以上的项,化简得到CCPTS势能为
最后得到CCPTS的拉格朗日函数为
选择(RM,θ,ψ)为系统的广义坐标,相应的广义力为(0,0,τ),由此得到CCPTS动力学方程为

3 仿真分析各广义坐标初值为
式中:RM(0)的初值大小决定CCPTS母星近地点的高度,为了尽量减小大气阻力对系统轨道的影响,应适当增加近地点高度;$\dot \theta $(0)的初值大小决定CCPTS初始轨道的形状,为了尽量降低载荷实现地月转移所需的速度增量,CCPTS初始轨道的远地点高度应该尽量大一些.CCPTS参数如表 1所示,仿真时间取为60000s.
表 1 CCPTS参数Table 1 Parameters of CCPTS
| 参数 | 数值 |
| μ/(m3·s-2) | 3.9877848×1014 |
| l1/m | 10000 |
| mM/kg | 5000 |
| mP1/kg | 1000 |
| ρ/(kg·m-3) | 970 |
| A/m2 | 6.283×10-5 |
| rM/m | 0.5 |
| rP/m | 0.5 |
| rT/m | 0.00447207 |
表选项
图 5给出了不同系绳长度偏差(Δl=0.01,0.1和1m)存在的情况下,CCPTS质心矢径RM随时间变化关系.由图可知,从宏观角度看,当系绳长度存在不同程度的偏差时,系统质心依然保持稳定的周期性椭圆轨道运动特性.
 |
| 图 5 CCPTS质心矢径随时间变化关系Fig. 5 Relation of radius of CCPTS’s center-of-mass |
| 图选项 |
为了明确系绳长度偏差对母星轨道的影响程度,定义母星质心矢径偏差为

式中:上标“d”表示偏差.图 6为系绳长度偏差对CCPTS质心矢径的影响.由图可知,虽然从宏观上难以看出系绳长度偏差对母星质心矢径的影响程度,但从微观上看,随着系绳长度偏差的增加,ΔRM随时间做周期变化的同时,其幅值也随之呈现出近似线性增加的趋势.由此说明CCPTS姿态的不对称以及在此情况下的姿态运动会对母星质心的轨道运动产生一定程度影响.
 |
| 图 6 系绳长度偏差对CCPTS质心矢径的影响Fig. 6 Influence of tether length deviation on radius of CCPTS’s COM |
| 图选项 |
图 7给出了系绳长度偏差(Δl=0.01,0.1和1m)存在的情况下,对称模型与结构偏差模型中CCPTS质心径向速度$\dot R$M随时间变化关系.由图可知,径向速度的变化介于[-1485,1485]m/s之间,并且从宏观上看,系绳长度偏差对母星径向速度影响甚微.
 |
| 图 7 CCPTS质心径向速度随时间变化关系Fig. 7 Relation of radial velocity of CCPTS’s COM changing with time |
| 图选项 |
同样,定义CCPTS的径向速度偏差ΔR·M为

图 8为系绳存在不同程度的长度偏差Δl时,对CCPTS母星径向速度$\dot R$M的影响随时间的变化关系.由图 8可知,随着Δl的增加,质心径向速度偏差$\dot R$M随轨道运动周期而做周期性变化的同时,其峰值(极大值和极小值)也随时间呈现近似线性增加的趋势.
 |
| 图 8 系绳长度偏差对CCPTS质心径向速度的影响Fig. 8 Influence of tether length deviation on radial velocity of CCPTS’s COM |
| 图选项 |
图 9同时给出了误差模型与标准模型中,系绳展长与当地重力梯度方向夹角ψ随时间变化关系的对比情况.在不考虑外力矩作用的情况下,由于没有其他外力矩因素的存在,因此在初始给定的旋转角速度情况下,ψ随时间呈线性增加的趋势.而当外力矩存在时,随着外力矩的增加,系绳所受到的角加速度越大,最终导致ψ随时间呈现出非线性指数增加的趋势,增加的快慢由外力矩值的大小所决定,外力矩越大,ψ增加越快.
 |
| 图 9 系绳与重力方向夹角随时间变化关系Fig. 9 Relation of angle between tether-span and local gravity gradient changing with time |
| 图选项 |
图 10为不同系绳长度偏差Δl对Δψ的影响随时间的变化关系.不同于Δl对ΔRM、Δ$\dot R$M所带来的影响,随着系绳长度偏差Δl的增加,Δψ的峰值也随之呈现近似相同的增加趋势(Δl增加的倍数与Δψ增加的倍数相等).对于某一偏差Δl而言,随着时间的推移,Δψ的幅值周期性累加,变化周期与CCPTS轨道周期一致.
 |
| 图 10 系绳长度偏差对系绳与重力方向之间夹角的影响Fig. 10 Influence of tether length deviation on angle between tether-span and local gravity gradient |
| 图选项 |
在外力矩τ=0以及τ=250kN·m两种情况下,图 11给出了不同长度偏差对系绳旋转角速度$\dot \psi $的影响.当外力矩τ不存在时,随着系绳长度偏差的增加,Δ$\dot \psi $的峰值也随之增加,当CCPTS位于远地点时,Δ$\dot \psi $达到极值.此外,相比于系绳长度偏差对轨道参数(RM,$\dot R$M)的时间累积性影响而言,Δ$\dot \psi $的峰值并未随着时间的增加而增加.当外力矩τ存在时,外力矩对系绳旋转的主导作用削弱了重力梯度力矩对系绳旋转运动的影响,导致Δ$\dot \psi $的极值随时间呈近似线性减小的趋势.
 |
| 图 11 系绳长度偏差对系绳旋转角速度的影响Fig. 11 Influence of tether length deviation on angular velocity of tether |
| 图选项 |
在外力矩τ=0以及τ=250kN·m两种情况下,图 12给出了系绳不同的长度偏差对系绳旋转角加速度$\ddot \psi $以及系绳角加速度偏差Δ$\ddot \psi $的影响.
 |
| 图 12 系绳长度偏差对系绳角加速度的影响Fig. 12 Influence of tether length deviation on angular acceleration of tether |
| 图选项 |
对比图 12(a)和图 12(b),无论外力矩存在与否,整体上难以看出系绳长度偏差对系绳角加速度的影响大小.此外,由于重力梯度力矩的存在,系绳角加速度并非常值,而是随时间呈现良好的周期性振动变化的趋势.当CCPTS位于轨道近地点时,重力梯度力矩最大,系绳角加速度取得极大值,反之,当CCPTS位于远地点时,重力梯度力矩最小,系绳角加速度取得极小值.对比图 12(c)和图 12(d),当τ=0时,Δ$\ddot \psi $的幅值随时间剧烈振荡(振荡周期等于系绳绕母星质心的旋转周期)的同时,其峰值也随之呈现累积性增加.
定义真近角偏差Δθ=θ(d)-θ以及真近角速度偏差Δ$\dot \theta $=$\dot \theta $(d)-$\dot \theta $.在τ=0和τ=250kN·m两种不同的情况下,图 13和图 14给出了系绳长度偏差对真近角及真近角速度的影响.由图可知,与系绳长度偏差对ΔRM、Δ$\dot R$M所带来的影响类似,随着系绳长度偏差Δl的增加,Δθ及Δ$\dot \theta $在进行周期变化的同时,其幅值均随之线性增加.
 |
| 图 13 系绳长度偏差对真近角的影响Fig. 13 Influence of tether length deviation on true anomaly angular |
| 图选项 |
 |
| 图 14 系绳长度偏差对CCPTS真近角速度的影响Fig. 14 Influence of tether length deviation on true anomaly angular velocity of CCPTS |
| 图选项 |
为了更直观地体现系绳长度偏差对CCPTS轨道参数(母星矢径、径向速度、径向加速度、真近角、真近角速度以及真近角加速度)的影响程度,此处定义相对偏差为
式中:上标“n”表示广义坐标对时间求导的阶次;q表示广义坐标;下标“tm”表示在仿真时间内各广义坐标及其各阶导数取得最大值的时刻.
表 2、表 3总结了系绳长度偏差Δl从0.01m变化到10m的过程中,同时在外力矩τ=0和τ=250kN·m两种情况下,系绳长度偏差对CCPTS轨道参数、姿态参数的影响程度.表中数据显示,随着系绳长度偏差的增加,CCPTS的广义坐标偏差以及广义速度偏差随之呈线性增加,但是,广义加速度偏差与系绳长度偏差没有明显的线性关系.此外,在外力矩存在的情况下,相比于不考虑外力矩时对轨道参数的影响,系绳长度偏差对CCPTS的轨道参数的影响的变化不明显,但对CCPTS姿态参数的影响明显小于不考虑外力矩时系绳长度偏差对姿态参数的影响.
表 2 系绳长度偏差对CCPTS轨道参数的影响Table 2 Influence of tether length deviation on the radial parameters of CCPTS
| 轨道参数 | 偏差 | 外力矩/ (kN·m) | Δl=0.01m | Δl=0.1m | Δl=1m | Δl=10m |
| (RM,θ) | RM绝对偏差/m | τ=0 | (7.6,7.0×10-6) | (75.7,6.6×10-5) | (757.4,6.67×10-4) | (7572,6.67×10-3) |
| θ绝对偏差/rad | τ=250 | (7.6,7.0×10-6) | (75.7,6.6×10-5) | (757.1,6.67×10-4) | (7574,6.67×10-3) | |
| RM相对偏差/% | τ=0 | (9.36×10-5, 1.59×10-5) | (0.00093,0.00015) | (0.0093,0.00152) | (0.093,0.015) | |
| θ相对偏差/% | τ=250 | (9.36×10-5, 1.59×10-5) | (0.00093,0.00015) | (0.00933,0.001516) | (0.0933,0.015) | |
| (${\dot R_{\rm M}},\dot \theta $) | ${\dot R_{\rm M}}$绝对偏差/ (m·s-1) | τ=0 | (9.78×10-3, 1.9×10-9) | (9.78×10-2, 1.96×10-8) | (0.976, 1.95×10-7) | (9.769, 1.96×10-6) |
| $\dot \theta $绝对偏差/ (rad·s-1) | τ=250 | (0.0101, 2.0×10-9) | (0.101, 1.96×10-8) | (1.014, 1.956×10-7) | (9.772, 1.996×10-6) | |
| ${\dot R_{\rm M}}$相对偏差/% | τ=0 | (0.057,0.000188) | (0.571,0.00193) | (5.698,0.0193) | (57.03,0.194) | |
| $\dot \theta $相对偏差/% | τ=250 | (0.0857,0.000185) | (0.8567,0.001808) | (8.601,0.01804) | (2.808,0.1974) | |
| (${\ddot R_{\rm{M}}},\ddot \theta $) | ${\ddot R_{\rm{M}}}$绝对偏差/ (m·s-2) | τ=0 | (2.2×10-5, -5.63×10-12) | (2.2×10-4, -5.69×10-11) | (2.1×10-3, -5.94×10-10) | (0.022, -5.79×10-9) |
| $\ddot \theta $绝对偏差/ (rad·s-2) | τ=250 | (2.7×10-5, -7.02×10-12) | (2.8×10-4, -6.98×10-11) | (2.7×10-3, -6.29×10-10) | (0.028, -7.55×10-9) | |
| ${\ddot R_{\rm{M}}}$相对偏差/% | τ=0 | (0.00687,0.0659) | (0.06869,0.666) | (0.6556,6.952) | (6.8686,67.767) | |
| $\ddot \theta $相对偏差/% | τ=250 | (0.00357,0.00495) | (0.036,0.0492) | (0.3339,0.443) | (4.0603,63.127) |
表选项
表 3 系绳长度偏差对CCPTS姿态参数的影响Table 3 Influence of tether length deviation on the attitude parameters of CCPTS
| 姿态参数 | 偏差 | 外力矩/(kN·m) | Δl=0.01m | Δl=0.1m | Δl=1m | Δl=10m |
| ψ | 绝对偏差/rad | τ=0 | 0.0072 | 0.0715 | 0.715 | 7.13 |
| τ=250 | 0.0043 | 0.043 | 0.430 | 4.285 | ||
| 相对偏差/% | τ=0 | 0.0001365 | 0.001356 | 0.01356 | 0.1352 | |
| τ=250 | 0.0000695 | 0.000695 | 0.00695 | 0.0693 | ||
| $\dot \psi $ | 绝对偏差/rad | τ=0 | 2.120×10-7 | 2.124×10-6 | 2.123×10-5 | 1.944×10-4 |
| τ=250 | 1.1×10-7 | 1.06×10-6 | 1.021×10-5 | 1.011×10-4 | ||
| 相对偏差/% | τ=0 | 0.00024 | 0.00242 | 0.02411 | 0.2204 | |
| τ=250 | 0.0000934 | 0.00090 | 0.00867 | 0.0856 | ||
| $\ddot \psi $ | 绝对偏差/rad | τ=0 | 1.103×10-8 | 1.123×10-7 | 1.046×10-6 | 1.692×10-6 |
| τ=250 | 6.427×10-9 | 6.267×10-8 | 4.828×10-7 | 1.288×10-6 | ||
| 相对偏差/% | τ=0 | 3.4718 | 222.4203 | 106.7783 | 135.2518 | |
| τ=250 | 0.5465 | 5.0869 | 42.203 | 96.5517 |
表选项
下面分析当载荷质量存在偏差时,载荷质量偏差对CCPTS各广义坐标以及广义速度的影响.表 4和表 5分别总结出了载荷质量偏差Δm对CCPTS的轨道参数和姿态参数的影响(同样也用绝对偏差与相对偏差来刻画).由表 4、表 5可知,随着载荷质量偏差Δm线性增加,轨道参数以及姿态参数的偏差量均呈现相同的线性增加趋势.由此说明,载荷质量偏差对CCPTS轨道参数以及姿态参数所产生的影响与系绳长度偏差所造成的影响类似,它们都是通过改变系统质心的方式来影响CCPTS的动力学特性.
表 4 载荷质量偏差对CCPTS轨道参数的影响Table 4 Influence of payload mass deviation on the radial parameters of CCPTS
轨道参数 | 偏差 | 外力矩/ (kN·m) | Δm=0.01kg | Δm=0.1kg | Δm=1kg | Δm=10kg |
| (RM,θ) | RM绝对偏差/m | τ=0 | (47.0,4.2×10-5) | (470.5,4.15×10-4) | (4704,4.101×10-3) | (46930,0.0413) |
| θ绝对偏差/rad | τ=250 | (47,4.1×10-5) | (470.4,4.09×10-4) | (4705,0.0041) | (46430,0.0413) | |
| RM相对偏差/% | τ=0 | (5.76×10-4, 9.55×10-5) | (0.0058,0.000943) | (0.0577,0.00938) | (0.555,0.0939) | |
| θ相对偏差/% | τ=250 | (5.79×10-4, 9.268×10-5) | (0.0058,0.000925) | (0.058,0.00937) | (0.569,0.0977) | |
| (${\dot R_{\rm M}},\dot \theta $) | ${\dot R_{\rm M}}$绝对偏差/ (m·s-1) | τ=0 | (0.0608, -1.17×10-8) | (0.594, -1.18×10-7) | (6.268, -1.17×10-6) | (61.77, -1.19×10-5) |
| $\dot \theta $绝对偏差/ (rad·s-1) | τ=250 | (0.0627, -1.17×10-8) | (0.6298, -1.20×10-7) | (6.044, -1.20×10-6) | (62.85, -1.19×10-5) | |
| ${\dot R_{\rm M}}$相对偏差/% | τ=0 | (0.763,0.00116) | (0.164,0.0117) | (45.987,0.108) | (89.353,1.113) | |
| $\dot \theta $相对偏差/% | τ=250 | (0.0505,0.00115) | (5.071,0.011) | (1.718,0.112) | (84.204,1.112) |
表选项
表 5 载荷质量偏差对CCPTS姿态参数的影响Table 5 Influence of payload mass deviation on the attitude parameters of CCPTS
| 姿态参数 | 偏差 | 外力矩/(kN·m) | Δm=0.01kg | Δm=0.1kg | Δm=1kg | Δm=10kg |
| ψ | 绝对偏差/rad | τ=0 | 0.0444 | 0.4444 | 4.443 | 44.51 |
| τ=250 | 0.0426 | 0.4278 | 4.277 | 42.43 | ||
| 相对偏差/% | τ=0 | 0.000844 | 0.00844 | 0.0843 | 0.8382 | |
| τ=250 | 0.000689 | 0.00692 | 0.0691 | 0.6817 | ||
| $\dot \psi $ | 绝对偏差/(rad·s-1) | τ=0 | 1.319×10-6 | 1.328×10-5 | 1.229×10-4 | 1.207×10-3 |
| τ=250 | 1.2×10-6 | 1.159×10-5 | 1.153×10-4 | 1.142×10-3 | ||
| 相对偏差/% | τ=0 | 0.1499 | 1.508 | 13.944 | 135.268 | |
| τ=250 | 0.1016 | 0.981 | 9.766 | 95.805 |
表选项
4 结 论本文以绳系卫星系统为载体,采用动量交换原理,对CCPTS进行了动力学研究,并得到:
1) 在考虑母星两端系绳长度不等、两载荷质量不同的前提下,本文建立了相应的误差动力学模型.
2) 仿真结果表明,系绳长度偏差以及载荷质量偏差对CCPTS广义坐标、广义速度均产生了相似的影响.随着系绳长度偏差以及载荷质量偏差的增加,反映系统轨道运行以及姿态运动的变量(如ΔRM、Δ${\dot R_{\rm M}}$、Δθ、Δ$\dot \theta $、Δψ及Δ$\dot \psi $)的幅值最大值均随之呈线性增加,而对于广义加速度而言,则没有明显的线性关系.
3) 结构偏差对CCPTS轨道参数的影响要小于对姿态参数的影响.随着CCPTS广义坐标对时间求导阶次的增加,由于结构偏差所导致的相应变量的偏差明显增加.此外,外力矩的存在能够削弱结构偏差对CCPTS动力学的影响程度.
因此,在实际工程应用中,如果CCPTS因各种因素的影响造成系绳长度存在差异或者载荷质量存在偏差时,可以在系绳末端或者母星上配置一个可以对系绳长度进行收放控制的机构,当系绳长度存在偏差以及载荷质量存在偏差时,通过调节某一根系绳的长度来达到调节系统质心位置以及平衡系统转动惯量的效果.
参考文献
| [1] | Carrou J A.Guidebook for analysis of tether applications, NASA-CR-178903[R].Washington D.C.:NASA, 1985. |
| [2] | Chen Y, Huang R, He L P, et al.Dynamical modelling and control of space tethers:A review of space tether research[J].Nonlinear Dynamics, 2014, 77(4):1077-1099. |
| Click to display the text | |
| [3] | George A K.Advantages of tether release of satellites from elliptic orbits[J].Journal of Guidance, Control, and Dynamics, 1988, 11(5):441-448. |
| Click to display the text | |
| [4] | Zhong L, Peter M B.Momentum exchange:Feedback control of flexible spacecraft maneuvers and vibration[J].Journal of Guidance, Control, and Dynamics, 1992, 15(6):1354-1361. |
| Click to display the text | |
| [5] | Puig-Suari J, Longuski J M, Tragesser S G.A tether sling for lunar and interplanetary exploration[J].Acta Astronautica, 1995, 36(6):291-295. |
| Click to display the text | |
| [6] | Chernousko F L.Dynamics of retrieval of a space tethered system[J].Journal of Application Mathematics and Mechanics, 1995, 59(2):165-173. |
| Click to display the text | |
| [7] | Maximilian M S, Ryan P R.Jovian orbit capture and eccentricity reduction using electrodynamic tether propulsion[J].Journal of Spacecraft and Rockets, 2015, 52(2):506-516. |
| Click to display the text | |
| [8] | Robert P H, Chauncey U.Cislunar tether transport system[J].Journal of Spacecraft and Rockets, 2000, 37(2):177-186. |
| Click to display the text | |
| [9] | Cartmell M P.Generating velocity increments by means of a spinning motorised tether[J].AIAA Journal, 1998, 21(2):155-158. |
| Click to display the text | |
| [10] | Cartmell M P, McKenzie D J.A review of space tether research[J].Progress in Aerospace Science, 2007, 44(1):1-22. |
| Click to display the text | |
| [11] | Ziegler S W.The rigid body dynamic of tethers in space[D].Glasgow:University of Glasgow, 2003. |
| Click to display the text | |
| [12] | Ziegler S W, Cartmell M P.Using motorized tethers for payload orbital transfer[J].Journal of Spacecraft and Rockets, 2001, 38(6):904-913. |
| Click to display the text | |
| [13] | Chen Y.Dynamical modelling of a flexible motorised momentum exchange tether and hybrid fuzzy sliding mode control for spin-up[D].Glasgow:University of Glasgow, 2010. |
| Click to display the text | |
| [14] | Chen Y, Cartmell M P.Hybrid fuzzy sliding mode control for motorised space tether spin-up when coupled with axial and torsional oscillation[J].Astrophys Space Science, 2010, 326(1):105-118. |
| Click to display the text | |
| [15] | Ismail N A.The dynamics of a flexible motorised momentum exchange tether (MMET)[D].Glasgow:University of Glasgow, 2012. |
| Click to display the text |
