现有研究使用较广泛的主要有刚性与弹性两类模型.刚性模型不计碰摩过程静子变形[1, 2, 3],适用于描述点碰摩与局部碰摩.Childs[4]针对单盘转子局部碰摩,将碰摩力表示成弹性力与比例阻尼力的组合,Muszynska综合考虑碰摩产生的冲击、摩擦和局部刚化效应,提出了一个碰摩力的数学模型[5, 6].杨树华等[7]基于Hertz接触理论建立了碰摩力模型,与传统双线性刚度模型的对比表明,该模型能更好刻画碰摩的非线性过程.
弹性模型假定静子是完全弹性的,不考虑碰摩的冲击效应.Sawicki和Montilla-Bravo[8]的模型中不仅假设静子是线弹性的,同时考虑了切向摩擦力的影响,并计入了静子的质量.单颖春等[9]对传统弹性碰摩力模型进行改进,利用有限元接触分析,通过拟合法获得了碰摩力的非线性指数关系.袁惠群等[10, 11, 12]提出了具有非线性接触力、非线性摩擦力的多种非线性碰摩力学模型,并应用于碰摩特征的研究和故障诊断,取得较好效果.
现有研究多从碰摩力作用的角度建立碰摩分析模型,采用多种方法以求对碰摩力进行准确拟合,而较少考虑碰摩对转子产生的约束作用及其对转子固有振动特性的影响.当碰摩较严重尤其是持续的刮蹭时,静子不仅对转子施加碰撞和摩擦的力载荷,同时将对于转子的振动位移产生约束,造成转子固有特性的改变.本文从碰摩产生约束效应的角度,提出了碰摩约束力学模型,并对约束作用下转子系统的响应特征进行了研究.
1 转子碰摩力学模型与机理1.1 碰摩约束模型航空发动机中碰摩过程包含碰撞、摩擦和刚度变化等复杂物理学现象.碰摩发生时,转静子件以一定的相对速度接触,接触的过程带有碰撞冲击效应,引起复杂的瞬态横向振动和部分扭转振动响应[13, 14].摩擦与碰撞紧密联系,随着接触部件的相对运动产生.摩擦载荷主要依赖于部件间的正压力、材料与部件的表面特性和相对速度等.
在发生碰摩时,静子不仅对转子施加碰撞和摩擦的力载荷,同时对于转子的振动位移幅值产生约束,碰摩越严重,转子对静子的侵入越深,产生的约束越强.当转子与静子脱离时,约束也随之消失,转子的特性又恢复至原来状态.在碰摩的过程中,转子与静子不断地碰撞和脱离,因此产生的约束作用不是稳定存在的,而是具有时变与突变特征,由此也引发转子系统的固有特性随之改变.
考虑碰摩造成的约束作用,建立力学模型如图 1所示,将碰摩产生的效应考虑为附加的约束刚度与约束阻尼.Ω为转子转速,c为转静子间的径向间隙,x和y分别为转子轴心在两个坐标轴方向的位移,z=x+jy为转子轴心径向位移,当转子与静子发生碰摩(z>c)时,静子对转子产生约束,动力方程的刚度与阻尼项发生突变,得到考虑碰摩约束作用的系统运动方程为
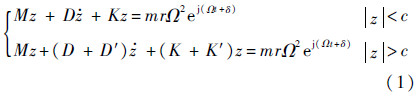
式中:M、K与D分别为系统的惯性项、刚度项与阻尼项;mrΩ2ej(Ωt+δ)为转子不平衡激励力,其中δ为不平衡力的相位角,m为不平衡质量;K′与D′为因碰摩产生的附加刚度与附加阻尼;r为不平衡量偏心半径.
 |
| 图 1 碰摩约束力学模型Fig. 1 Constraint mechanical model for rub-impact |
| 图选项 |
碰摩时机匣同时对转子的径向与切向产生约束,切向约束刚度与径向约束的强弱及接触面摩擦系数μ正相关.同时,约束刚度随着碰摩的恶化而增大,将约束随碰摩恶化产生的增强效应描述为影响系数1-c/z,即碰摩时,振幅z越大,影响系数越大,约束越强.考虑上述两种特征,将因碰摩而产生的附加刚度表示为K′=[(Ks+fs(z))(1+jμ)](1-c/z),Ks与fs(z)分别为约束刚度的线性项与非线性项,它们构成约束刚度的主体,[(Ks+fs(z))(1+jμ)]综合反映了径向与切向的约束刚度,其中μ为摩擦系数.阻尼主要影响响应振幅,对系统固有特性影响较小,将附加阻尼项简化描述为Dd+fd(z),Dd与fd(z)分别为阻尼的线性与非线性项.其中fs和fd为与位移z相关的函数.
由于碰摩的冲击效应,附加刚度K′与附加阻尼D′呈现出非光滑特征[15, 16],即当|z| < c时,碰摩未发生,K′=0,D′=0;当|z|≥c时,发生碰摩,此时K′=[(Ks+fs(z))(1+jμ)](1-c/z),D′=(Dd+fd(z)).
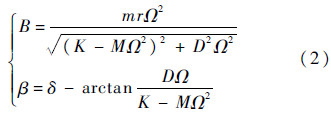
1.2 碰摩约束条件下转子振动响应特征对微分方程组进行求解可得到转子的振动响应情况,设方程解的形式为Z(t)=Bei(Ωt+β),其中B为系统的振动响应幅值,代入方程组,原方程组转化为振幅B的一元二次方程,易得当|z|<c时,响应振幅B与相位角β为
当|z|<c时,由式(1)推导得出有关B的方程:
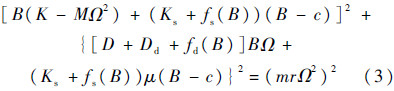
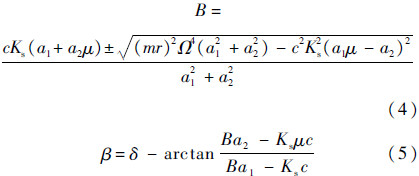
其中B可能存在多解,因此系统有可能存在多个振动响应.对式(3)进行简化,令a1=K-MΩ2+Ks,a2=(D+Dd)Ω+Ksμ,当不考虑非线性项,即当|z|≥c且fd=fs=0时,解得振动响应的幅值和相位角分别为
令Δ=(mr)2Ω4(a12+a22)-c2Ks2(a1μ-a2)2,通过式(4)可知,当
Δ<0,方程无实数解,当

方程存在两个正实数解,当
方程仅有一个正实数解.
给定式(4)中各参数值,m=0.1 kg,r=0.1 m,M=100 kg,K=1×106 N/m,D=200 N·s/m,Ks=3×105 N/m,μ=0.1,c=0.15 mm,Dd=200 N·s/m,给定转速Ω从880~1 040 r/min范围变化,得到相应的转子碰摩响应曲线,如图 2所示.
 |
| 图 2 转子振动响应随转速变化曲线Fig. 2 Response curve of rotor with speed variation |
| 图选项 |
转子的振动响应幅值随转速的变化关系如图 2所示.图中虚线为典型无碰摩转子幅频响应曲线,具有一个明显的共振峰值,转速达到955 r/min时,系统振幅最大.当碰摩发生时,相比无碰摩峰值,由于附加约束的存在,响应大小有一定程度降低,共振响应区间加大.其根本原因在于静子对转子的约束作用使得转子系统的刚度增强,改变了系统的固有特性,使得系统的共振频率发生了偏移,同时由于附加约束刚度的不稳定,导致转子在较宽的转速域内均存在共振.
0-1-3-5反映了升速过程中的转子系统响应特征,当振动响应大于1时,转子静子发生碰摩,与无碰摩响应相比,碰摩产生的附加约束使得响应一定程度降低,随着碰摩的进行,约束刚度增加,使得一定转速范围转子始终处于共振区间,转子发生持续的碰摩.碰摩进行至2-3区间时,系统响应出现了两个振动响应解(2-3与4-3段),物理过程上对应着不稳定的碰摩接触过程,转子在该工作转速区间可能失稳.当相对响应值到达点3时,转速继续上升,式(4)将不存在正实数解,此时转静子接触分离,响应振幅从点3突跃到点5.5-4-2-1-0反映了发动机的减速过程,当到达点4时碰摩发生,系统振动响应值发生了响应突跃,与加速过程不同,减速过程中没有出现接触不稳定现象.
1.3 力学特征参数对转子振动特性的影响约束刚度受冲击载荷,部件材料等多种因素影响,给定约束刚度K′中参数Ks大小分别为6×104,3×105,6×105 N/m,其余系统参数与第1.2节相同,得到不同约束刚度下系统响应幅值随转速变化情况,如图 3所示.
 |
| 图 3 约束刚度对碰摩响应的影响Fig. 3 Influence of constraint stiffness on rub-impact response |
| 图选项 |
如图 3所示,随着约束刚度的增加,碰摩响应变小,但共振区间长度明显增加.约束刚度的增强改变了系统的固有特性,系统共振频率增高,不稳定接触区间也随之增大.而当约束刚度值降低至6×104 N/m时,转子从碰摩接触到分离过程响应幅值只有一个解,即不存在不稳定接触过程,响应曲线变化趋势接近无碰摩状况.
摩擦系数与碰摩时相对运动速度、接触表面性质等参数相关.分别给定摩擦系数大小为0.01、0.1及1,其余系统参数与第1.2节相同,得出不同摩擦系数条件下的转子系统振动响应变化如图 4所示.
 |
| 图 4 摩擦系数对碰摩响应的影响Fig. 4 Influence of friction coefficient on rub-impact response |
| 图选项 |
如图 4所示,相同转速下,摩擦系数越大,系统响应幅值越小.摩擦系数实际反映了切向约束的强弱,切向约束刚度并不直接影响转子横向振动,但在相同转速条件下,转子能量输入保持不变,若将切向约束看作一弹簧,则摩擦系数越大,切向约束刚度越大,转子系统越多的能量转化成约束弹簧的势能,响应幅值相应减小.随着摩擦系数增大,不稳定接触区间减小,当摩擦系数增大到一定程度,全过程响应只存在一个解,不稳定接触区间消失.
2 碰摩约束下复杂转子系统响应2.1 转静件弹性碰摩方程1.1节中提出的力学模型,忽略了转静子的结构特征.对于具有结构特征的复杂转子系统,进行碰摩动力响应分析时,需要基于结构特征,并考虑对转静件的弹性体特性进行碰摩过程的分析.图 5所示为航空发动机转静件碰摩的动力学简化模型,包含转子、叶片以及机匣结构,相应的碰摩动力学基本方程为
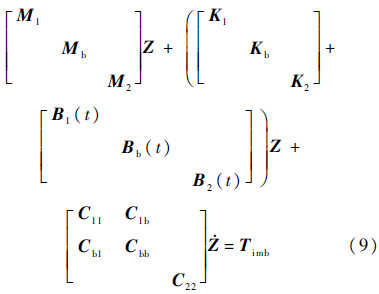
式中:M1、Mb和M2分别为转子轴系的质量矩阵、叶片的质量矩阵和静子机匣的质量矩阵;Z为位移矩阵;K1、Kb和K2分别为转子系统的刚度矩阵、叶片的刚度矩阵、静子机匣的刚度矩阵;C11为转子自身的阻尼矩阵;Cbb为叶片自身的阻尼矩阵;C22为机匣自身阻尼矩阵;C1b和Cb1分别为发生碰摩叶片与转子轴系间的交叉阻尼项;Timb为不平衡力;B1(t)、Bb(t)和B2(t)分别为时刻t转子轴系、叶片及机匣因碰摩造成的刚度矩阵变化项,其中轴系刚度矩阵变化项是关于该时刻的转速ω的函数,叶片刚度矩阵变化项是关于碰摩部件形变的函数,静子机匣刚度矩阵变化项主要是该时刻碰摩引起静子机匣变形的函数.
 |
| 图 5 航空发动机转静碰摩简化模型Fig. 5 Simplified model for rotor and stator rub-impact in aero-engine |
| 图选项 |
碰摩过程动态响应计算中,将显示与隐式积分方法进行有效结合以准确描述碰摩的动态特征并保证较好的计算效率.具体算法步骤如下:
1) 对求解域离散化,采用位移格式构造插值函数,并形成系统动力方程系数矩阵M、C、K,给定系统的初值条件Zt(0),
 t(0),Zt(0),T(0)(转速和不平衡力).
t(0),Zt(0),T(0)(转速和不平衡力).2) 根据给定初值条件通过隐式求解得到系统静态响应,将结果作为初值条件对系统运动方程刚度项进行修正,随后采用显式中心差分进行数值积分求解得到系统时域响应.2.2 风扇叶片机匣碰摩响应特征2.2.1 有限元模型以大涵道比涡扇发动机低压转子的典型结构形式为对象,建立有限元分析模型,进行风扇叶片与机匣发生碰摩的动力响应分析(见图 6).转子跨度2 000 mm,风扇直径900 mm,风扇叶片与机匣间隙2 mm.转子采用0-2-1支承方案,支承刚度均为1×107 N/m.对于大涵道比发动机,低压转子跨度长,刚度弱,工作于弯曲临界以上,易发生较大变形与导致碰摩.
 |
| 图 6 碰摩有限元模型Fig. 6 Finite element model for rub-impact |
| 图选项 |
2.2.2 稳态响应对风扇叶片与机匣碰摩条件下的稳态响应进行计算,研究碰摩点存在附加约束对转子系统振动特性的影响.在风扇位置均给定不平衡量100 g·mm,结构阻尼比0.03,对发生碰摩的风扇叶片处施加附加径向约束刚度K=1×107 N/m,对模型进行不平衡响应分析,得到存在碰摩约束时风扇与低压涡轮一级处的不平衡响应如图 7所示.
 |
| 图 7 碰摩约束时转子不平衡响应Fig. 7 Unbalance response considering rub-impact constraint |
| 图选项 |
图 7中在40 Hz附近风扇位置出现一个响应峰值,该频率对应转子的风扇摆动振型.风扇位置存在碰摩约束时,风扇位置响应变化明显,共振频率增大,这表明碰摩发生后转子系统的固有特性发生改变.低压涡轮一级位置在计算区间出现两个共振峰值,响应频率分别对应着以涡轮摆动为主的局部振动与一阶弯曲振动,因风扇叶片碰摩引发的约束作用对涡轮位置的振动响应影响很小,涡轮位置的响应大小及共振频率几乎没有变化.
考虑结构特征的转子共振响应区间变化规律与碰摩约束力学模型分析结果相似,如图 8所示,假设在通过临界转速峰值时转静件间发生碰摩,此时由于附加约束的作用,系统固有特性改变,临界转速上升,不平衡激励增大,对应振动响应幅值增大,而继续升速通过临界转速时,加剧的振动将使碰摩状态恶化而使约束刚度进一步增加,共振区域持续延伸.因此可能造成转子升速过程中,始终有较大的振动响应而很难在开车过程中通过某阶临界转速.
 |
| 图 8 碰摩作用下共振响应区扩张Fig. 8 Expansion of resonance area considering rub-impact |
| 图选项 |
对于两自由度力学模型,碰摩附加约束对振幅大小具有一定限制作用,而真实转子为连续体,约束仅针对局部区域,影响转子的对称性,可能造成局部响应幅值上升.同时对于实际转子,响应情况与碰摩部件位置及系统模态振型密切相关,约束对以碰摩部件为主的模态所对应的共振频率及响应影响较大,而对转子其余模态(如以涡轮振动为主)与部件影响相对较小.
2.2.3 瞬态响应给定转子转速2 400 r/min,对转子不同碰摩程度下的瞬态响应进行分析.无碰摩时,由于不平衡力的激励作用,表现出标准的强迫振动响应特征,响应曲线光滑,响应幅值呈正弦规律变化,如图 9虚线所示.给定不平衡载荷为1×10-4kg·m,提取碰摩初始阶段转子响应情况如图 9实线所示,当响应幅值大于转静间隙时,碰摩发生,此时碰摩叶片与机匣均发生弹性变形,接触后迅速发生分离,并经过弹性恢复与响应回升的过程后再次发生碰摩.碰摩使得风扇叶片不断发生弹性变形与恢复,因此转子在与机匣的接触和分离过程中发生轻微振荡,响应曲线表现出锯齿状拟周期波形.两次碰摩经历的循环时间相近(Δt1≈Δt2),响应波形类似,作拟周期运动.
 |
| 图 9 转子轻微碰摩时域响应Fig. 9 Time-domain curve of soft rub-impact |
| 图选项 |
可见,在一定范围内,碰摩程度较轻时,叶片仅发生弹性变形,系统并未出现明显的不稳定接触过程,由于不断发生碰撞接触与分离,转子轴心轨迹表现出类椭圆多边形特征,如图 10所示.转静子碰摩接触时间较短,运动形式较为稳定,碰摩产生的约束效应并不显著.
 |
| 图 10 轻微碰摩转子轴心轨迹Fig. 10 Rotor orbit of soft rub |
| 图选项 |
将给定的不平衡载荷增大至1×10-3kg·m,碰摩加剧,转子响应情况如图 11所示,从响应信号可以看出,第一次碰摩发生后,叶片与机匣并未迅速脱离,而是发生持续的刮蹭,此时机匣对转子产生持续的约束限制了响应的提升,随着碰摩的进行,响应幅值始终在2 mm范围不稳定波动.持续刮蹭持续一定时间后,叶片发生塑性变形并与机匣脱离,后续发生两次碰摩,与轻微碰摩相比,两次碰摩差异较大,响应信号无明显规律.转子轴心轨迹呈不规则形状,如图 12所示.转子稳定性变差,随着时间的推进可能出现失稳.
 |
| 图 11 转子严重碰摩时域曲线Fig. 11 Rotor time-domain curve of heavy rub-impact |
| 图选项 |
 |
| 图 12 严重碰摩转子轴心轨迹Fig. 12 Rotor orbit of heavy rub-impact |
| 图选项 |
3 结论1) 碰摩时静子等效于对转子产生了附加的约束,该约束具有时变与突变特性.碰摩产生的附加约束改变了转子的固有特性,使得转子系统共振区域扩展.在特定参数范围,系统可能出现多个振动响应解,振动响应曲线表现出接触不稳定与振幅跃迁等特征.
2) 附加约束刚度越大,共振响应区间越宽,不稳定接触区间越大.转静件接触摩擦系数越大,共振响应区间越窄,不稳定接触区间越小.约束刚度与摩擦系数的增大都会造成响应幅值的降低.
3) 对于具有航空发动机结构特征的碰摩系统,转子系统的响应还与碰摩位置及转子模态密切相关,碰摩约束对以碰摩部件变形为主的模态对应振动响应影响较大,而对其余模态影响较小.碰摩程度较轻微时,叶片位于弹性变形区,响应表现出拟周期特征,轴心轨迹为多边形,转子运行较稳定.碰摩严重时,叶片产生塑性变形,响应幅值在一定时间范围内于固定值附近波动,转子稳定性变差.
参考文献
| [1] | Li G X, Paidoussis M P.Impact phenomena of rotor-casing dynamical systems[J].Nonlinear Dynamics, 1994, 5(1):53-70. |
| Click to display the text | |
| [2] | Wu X F, Wang D.Irregular period-doubling to chaos to period-decreasing bifurcation in a rotor casing dynamics system[J].Tsinghua Science and Technology, 1997, 2(3):21-29. |
| Click to display the text | |
| [3] | 张思进, 陆启韶, 王琪.转子与定子几何不对中引起的碰摩分析[J].振动工程学报, 1998, 11(4):115-119.Zhang S J, Lu Q S, Wang Q.Analysis of rub-impact events for a rotor eccentric from the case[J].Journal of Vibration Engineering, 1998, 11(4):115-119(in Chinese). |
| Cited By in Cnki (32) | |
| [4] | Childs D W.Rub-induced parametric excitation in rotors[J].Journal of Mechanical Design, 1979, 101(4):640-644. |
| Click to display the text | |
| [5] | Muszynska A.Stability of whirl and whip in rotor/bearing systems[J].Journal of Sound and Vibration, 1988, 127(1):49-64. |
| Click to display the text | |
| [6] | Muszynska A.Partial lateral rotor to stator rubs[C]//I Mech E Conference Publications (Institution of Mechanical Engineers).London:Institute of Mechanical Engineering, 1984:327-335. |
| Click to display the text | |
| [7] | 杨树华, 杨积东, 郑铁生, 等.基于Hertz接触理论的转子碰摩模型[J].应用力学学报, 2003, 20(4):61-64.Yang S H, Yang J D, Zheng T S, et al.A new rotor-stator rubbing modal using Hertzian impact-contact theory[J].Chinese Journal of Applied Mechanicics, 2003, 20(4):61-64(in Chinese). |
| Cited By in Cnki (43) | |
| [8] | Sawicki J T, Montilla-Bravo A.Thermal mechanical behavior of rotor with rubbing[J].International Journal of Rotating Machinery, 2003, 9(1):41-47. |
| Click to display the text | |
| [9] | 单颖春, 刘献栋, 何田, 等.双转子系统碰摩有限元接触分析模型及故障诊断[J].航空动力学报, 2005, 20(5):789-794.Shan Y C, Liu X D, He T, et al.Research on the finite element impact-contact analytical model of dual-rotor system and its diagnosis method[J].Journal of Aerospace Power, 2005, 20(5):789-794(in Chinese). |
| Cited By in Cnki (25) | |
| [10] | 袁惠群, 王德友.非线性碰摩力对碰摩转子分叉与混沌行为的影响[J].应用力学学报, 2001, 18(4):16-20.Yuan H Q, Wang D Y.Measurement of wave energy dissipated by specific damping capacity[J].Chinese Journal of Applied Mechanicics, 2001, 18(4):16-20(in Chinese). |
| Cited By in Cnki (59) | |
| [11] | 袁惠群.转子系统的若干非线性动力学问题及分叉与混沌研究[D].沈阳:东北大学, 2000.Yuan H Q.Study on some nonlinear dynamic problems with bifurcation and chaos of rotor system[D].Shenyang:Northeastern University, 2000(in Chinese). |
| Cited By in Cnki | |
| [12] | 袁惠群, 李鹤, 闻邦椿.发电机转子同步稳定性的非线性分析[J].东北大学学报:自然科学版, 2001, 22(4):405-408.Yuan H Q, Li H, Wen B C.Research on the nonlinear synchronous stability of generator rotor[J].Journal of Northeastern University:Natural Science, 2001, 22(4):405-408(in Chinese). |
| Cited By in Cnki (11) | |
| [13] | 孙政策, 徐健学, 周桐.碰摩转子中弯扭耦合作用的影响分析[J].应用数学和力学, 2003, 24(11):1163-1169.Sun Z C, Xu J X, Zhou T.Study on influence of bending torsion coupling in an impacting rub rotor system[J].Applied Mathematics and Mechanics, 2003, 24(11):1163-1169(in Chinese). |
| Cited By in Cnki (11) | |
| [14] | 黄文俊, 李录平.碰摩转子弯扭耦合振动特性仿真实验研究[J].汽轮机技术, 2006, 48(1):23-26.Huang W J, Li L P.Simulation experimental study on bending-torsional coupling vibratory characteristics in a contact-rubbing rotor[J].Turbine Technology, 2006, 48(1):23-26(in Chinese). |
| Cited By in Cnki (7) | |
| [15] | 张思进, 陆启韶.碰摩转子系统的非光滑分析[J].力学学报, 2000, 32(1):59-69.Zhang S J, Lu Q S.A non-smooth analysis to the rub-impacting rotor system[J].Acta Mechanica Sinica, 2000, 32(1):59-69(in Chinese). |
| Cited By in Cnki (74) | |
| [16] | 张思进.机械碰撞运动中的非光滑动力学[M].长沙:湖南大学出版社, 2008:2-5.Zhang S J.Non-smooth dynamics in mechanical collison[M].Changsha:Hunan University Press, 2008:2-5(in Chinese). |
| Cited By in Cnki |
