全文HTML
--> --> -->萧寒等[14]和张丽娟等[15]研究了一类外激励作用下的弹簧摆系统的分岔和周期稳定性, 明确了系统的拟周期环面破裂和阵发性进入混沌的路径. Bek等[16]解析出阻尼弹簧摆的二阶近似非线性响应; Butikov等[17]研究了一类具有黏性阻尼和干摩擦阻尼作用的弹簧摆, 获得了系统干摩擦阻尼确定的极限环及对称的非黏性强迫振荡的稳态周期性. Zhou等[18]和Franco等[19]研究倒立摆的亚谐分岔、混沌运动及平衡控制, 获得异宿轨临界条件和系统参数的鲁棒性. Najdecka等[20]研究了参数激励的双摆动力特性, 明确了同步与旋转稳定性间的关系.
对实际应用中特定工程摆悬挂点的激励响应的研究, 也引发了****的关注[21,22]. Kholostova[23]研究了悬挂点受水平激励的单摆, 解析出系统周期运动中稳定性和不稳定周期运动的边界条件; Jallouli等[24]研究了谐波激励和参数激励作用的非线性摆的零吸引子孤子解转换为周期稳定解的条件; Brzeski等[25]研究了强迫Dufffing振荡摆的动力分岔、旋转周期解及参数空间中的共存吸引子条件.
实际工程中的船用起吊机[26]、绳系航天器[27]及水下极端环境球形机器人重摆[28], 以及轧制工艺系统中工作辊偏心于支撑辊的轧制状态, 都可通过力学分析转化为受垂直激励和水平约束的单摆[29]. 可见, 受垂直激励和水平约束的摆系统是单摆物理模型的进一步延伸, 工程应用广泛. 对此类问题的研究文献较少, 使用现有单摆物理系统的研究结论, 无法明确对这类多参量作用下的工程弹簧摆的物理属性及工作性能的优选评估. 因此深入研究这类摆系统的基本物理问题和动力学机制是提升这类工程摆广泛优化应用的关键.
本文较系统地研究了“受垂直激励和水平约束的单摆系统”的基本物理问题. 通过理论解析和数值计算, 深入研究了该类典型工程摆系统的亚谐共振、幅频特性、混沌、单参和双参分岔及吸引域流形转迁等特性, 揭示了这类摆系统的工作参数变化诱发能量改变对系统动特性和工作性能的影响.
 图 1 受垂直激励和水平约束的单摆模型
图 1 受垂直激励和水平约束的单摆模型Figure1. Simple pendulum model with vertical excitation and horizontal constraint.
摆球的水平位移xp和垂直位移yp可以表示为:




y方向垂直位移激励型式为简谐激励, 可表示为
把(4)式和(5)式代入(3)式, 并进行无量纲化处理, 令ω1 = (k1/m)1/2, τ = ω1t, ωb = ω/ω1, u = x, 整理得到


2
3.1.受垂直激励和水平约束单摆系统的1/2次亚谐共振响应
采用多尺度法[32]对系统求解. 考虑到振动位移x为小量, 令sinx ≈ x, 引入小参数ε, (6)式可化为
将(8)—(11)式代入(7)式, 比较ε同幂次系数, 得到
将(16)式代入(15)式, 消去久期项得
通过数值解析, 得到幅频响应曲线. 图2反映了b (激励幅值a和摆长l )变化时, 系统随调谐值σ变化的幅频响应. 调谐值σ相同时, b增大, 系统共振区带宽增加; 沿纵坐标方向共振曲线, 左侧幅值ax与b呈正相关, 右侧幅值ax与b呈负相关; 沿横坐标方向共振曲线, 左侧b与调谐值σ呈负相关, 右侧呈正相关. 图3反映了k33取不同值时, 系统随调谐值σ变化的幅频响应. 调谐值σ相同时, 随k33增大, 系统共振区带宽减小; 沿纵坐标方向, 左右两侧的共振曲线幅值ax与k33呈负相关; 沿横坐标方向, 在相同振幅值ax前提下, k33与调谐值σ呈正相关. 图4反映了c11取不同值时, 系统随调谐值σ变化的幅频响应曲线. 在相同调谐值前σ提下, 随c11增大, 系统共振区带宽变窄; 沿纵坐标方向共振曲线, 左侧ax与c11呈负相关, 右侧ax与c11呈正相关; 沿横坐标方向, 在相同振幅值ax前提下, c11与调谐值σ在左侧呈正相关, 在右侧呈负相关.
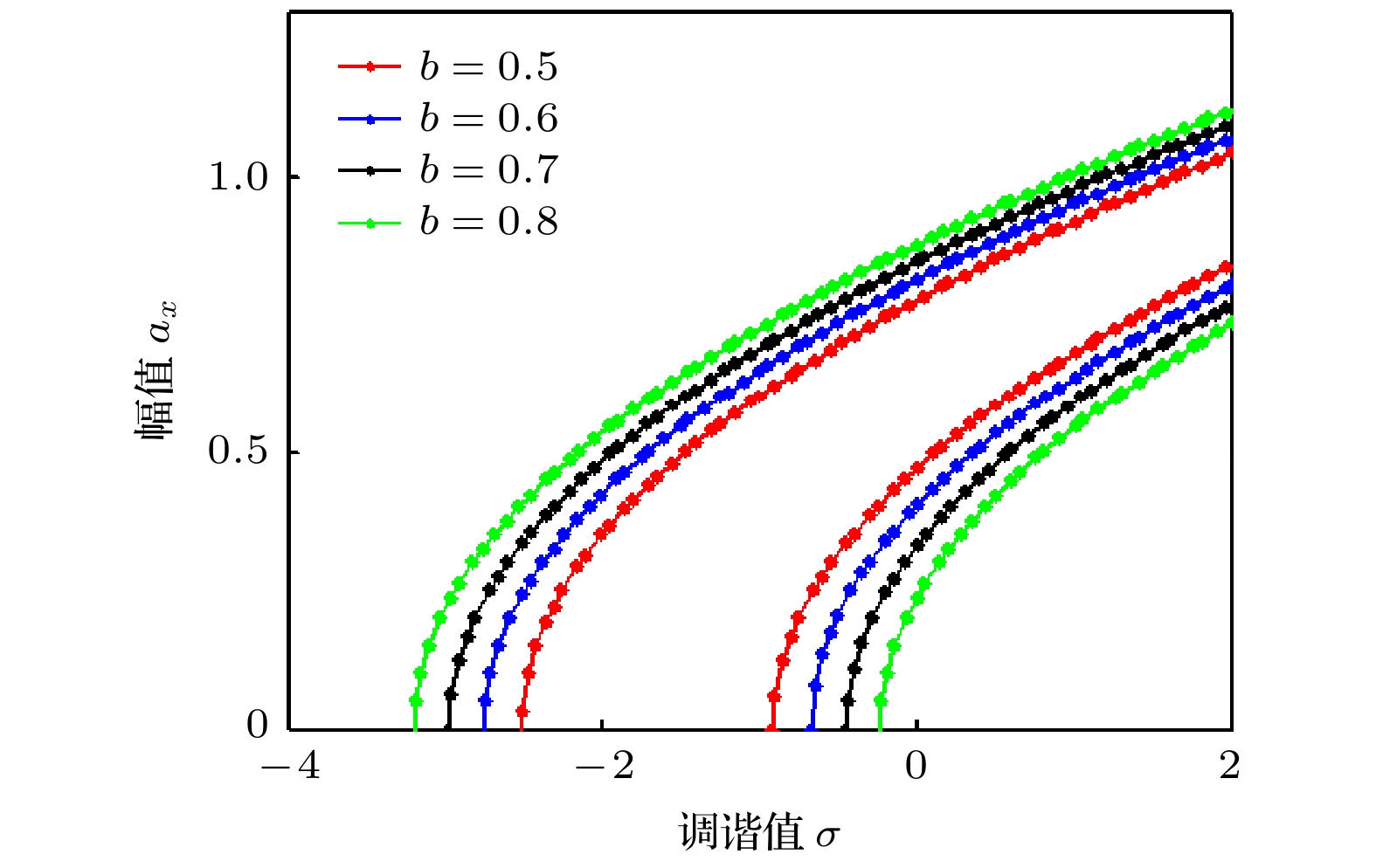 图 2 σ变化下改变b的幅频响应曲线
图 2 σ变化下改变b的幅频响应曲线Figure2. Amplitude-frequency response curves with different σ and b.
 图 3 σ变化下改变k33的幅频响应曲线
图 3 σ变化下改变k33的幅频响应曲线Figure3. Amplitude-frequency response curves with different σ and k33.
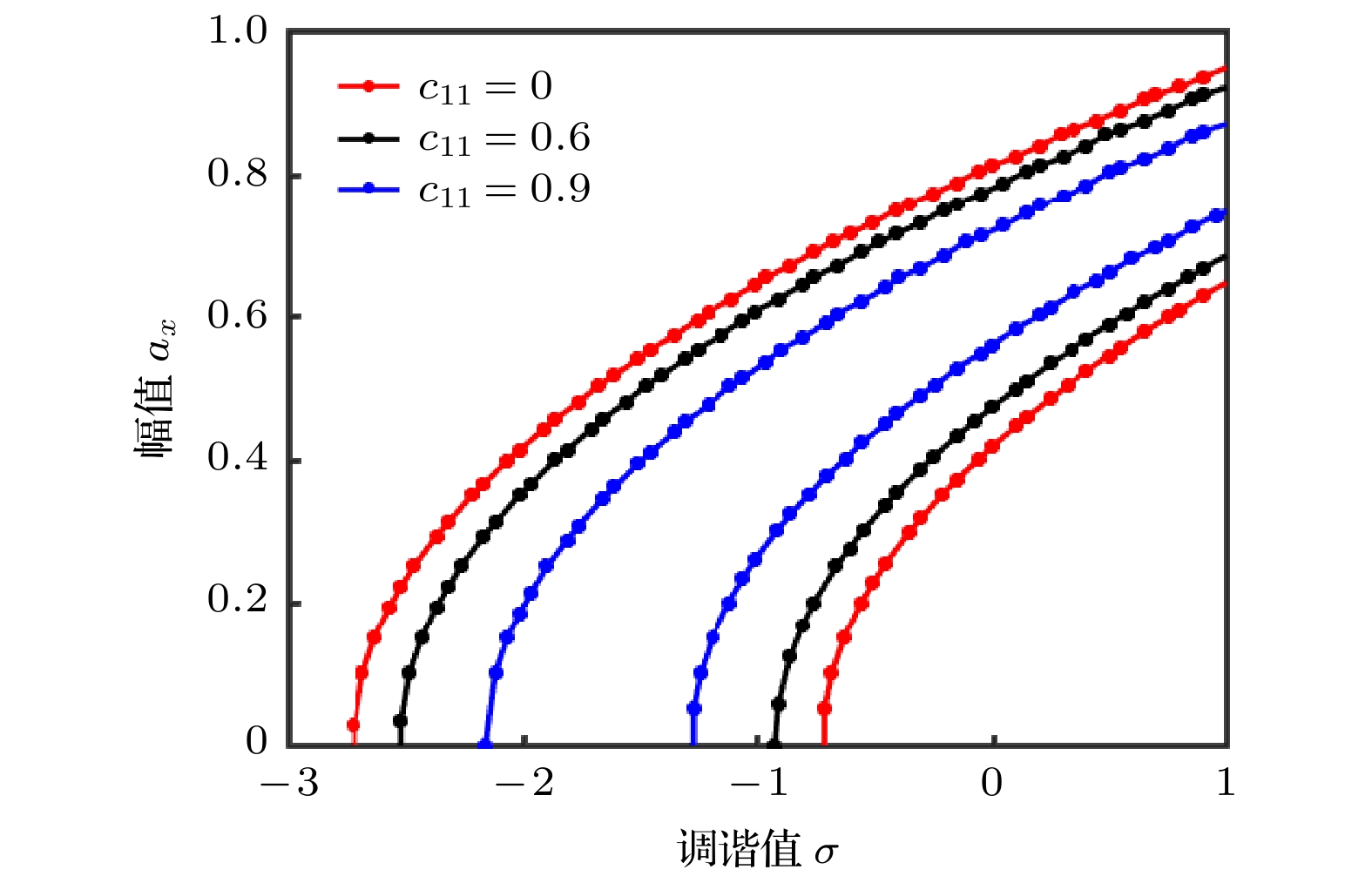 图 4 σ变化下改变c11的幅频响应曲线
图 4 σ变化下改变c11的幅频响应曲线Figure4. Amplitude-frequency response curves with different σ and c11.
图5反映了调谐值σ变化时, 系统随c11变化的幅频响应曲线. 相同调谐值σ时, 曲线关于c11 = 0对称, 随调谐值σ绝对值增大, 系统振动共振幅值减小; 沿纵坐标方向共振曲线, ax与σ呈负相关; 沿横坐标方向, 在相同振幅值ax前提下, c11与调谐值σ呈正相关; 随调谐值σ绝对值增大, 系统振动共振区带宽由封闭曲线转化为开口的缩颈曲线, 系统能耗的增大使共振幅值降低; 且随σ增大, 振幅死亡的开口度增宽, 有利于系统参数的优化阈调控. 图6反映了调谐值σ取不同值时, 系统随k33变化的幅频响应曲线. 随调谐值σ绝对值增大, 共振区域向k33绝对值减小的方向移动; 沿纵坐标方向共振曲线, 左侧ax与σ呈负相关, 右侧ax与σ呈正相关; 沿横坐标方向, 在相同振幅值ax前提下, 共振曲线左侧k33与调谐值σ呈正相关, 右侧k33与调谐值σ呈负相关.
 图 5 c11变化下改变σ的幅频响应曲线
图 5 c11变化下改变σ的幅频响应曲线Figure5. Amplitude-frequency response curves with different c11 and σ.
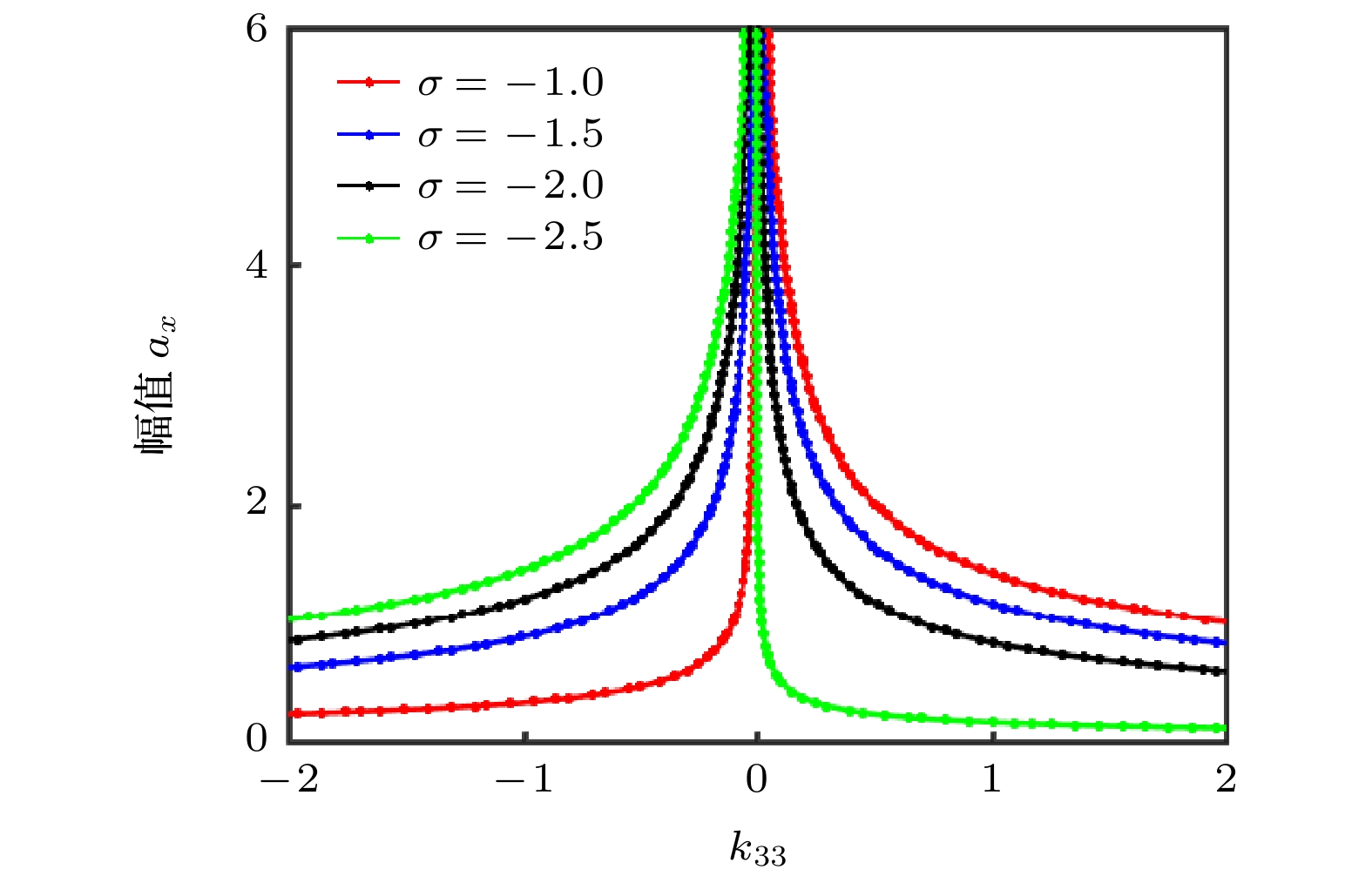 图 6 k33变化下改变σ的幅频响应曲线
图 6 k33变化下改变σ的幅频响应曲线Figure6. Amplitude-frequency response curves with different k33 and σ.
实际工程中受垂直位移激励和水平约束的抽象单摆, 往往在水平约束方向的小振幅输出下, 可获得良好的工作性能. 通过上述对系统的1/2次亚谐共振幅频特性分析, 得到参数b, k33, c11以及调谐值σ对系统幅频特性的影响规律. 由b = a/l可知, 增大垂直位移激励幅值a或减小等效摆长l, 将导致单摆系统共振区域带宽增大、共振幅值增大; 参数


2
3.2.受垂直激励和水平约束单摆系统的1/2次亚谐共振的分岔结构
由奇异性理论定常解的局部稳定性分析, 结合系统幅频特性方程(27)得到结合普适开折理论, (31)式能够视为Golubitsky-Schaeffer范式[33] Q(y, λ) = y2-λ2的普适开折, 奇异点即为余维1的临界点. 受垂直激励和水平约束的单摆系统1/2次亚谐共振分岔拓扑结构如下:
a)分岔点集:
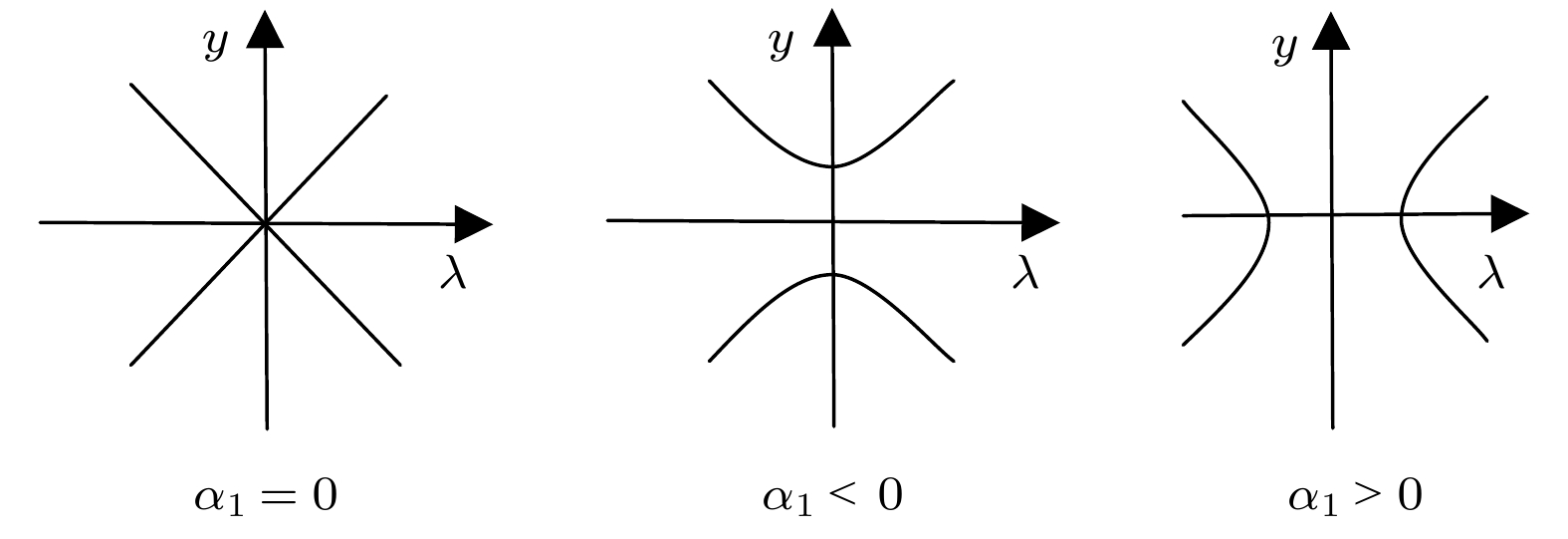 图 7 受垂直激励和水平约束单摆系统1/2次亚谐共振分岔拓扑结构
图 7 受垂直激励和水平约束单摆系统1/2次亚谐共振分岔拓扑结构Figure7. Bifurcation topology of 1/2-order subharmonic resonance of a simple pendulum system with vertical excitation and horizontal constraint.
4.1.受垂直激励和水平约束单摆系统的势阱
运用Melnikov方法, 对受垂直激励和水平约束的单摆非线性系统进行混沌运动分析与预测. 令
由(38)式和(39)式, 得到相轨线方程:
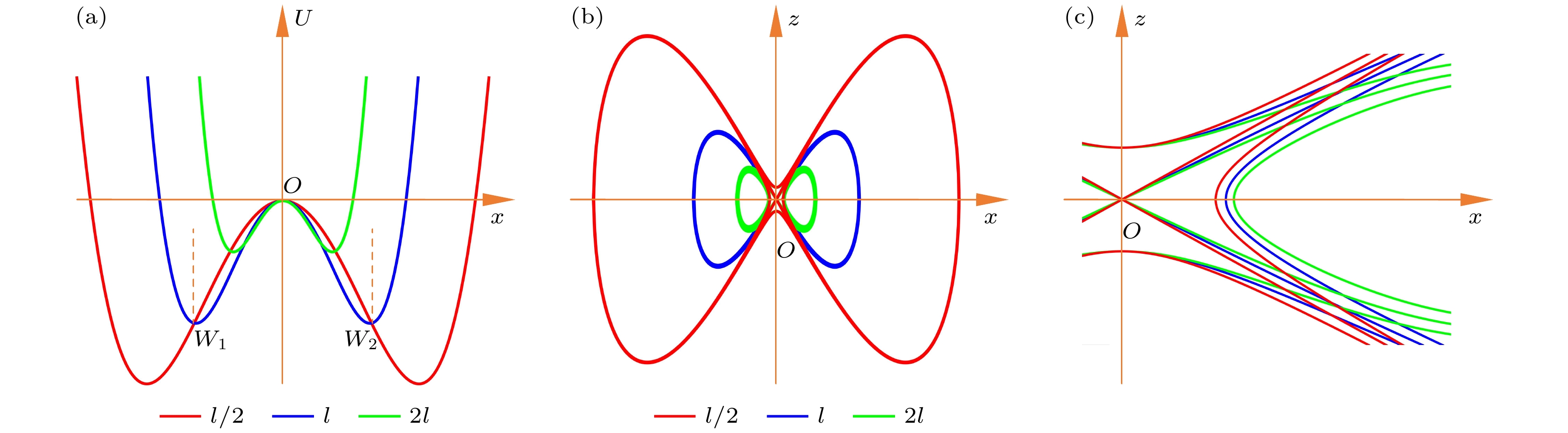 图 8 (a)势阱曲线; (b), (c)相轨线及其局部放大图
图 8 (a)势阱曲线; (b), (c)相轨线及其局部放大图Figure8. (a) Potential well curve; (b), (c) phase track and its enlarged view.
2
4.2.受垂直激励和水平约束单摆系统的同宿轨与混沌预测
当h = 0时, 可得(38)式同宿轨道为存在


图9直观反映了系统发生混沌的临界参量b, c11, ωb之间的制约关联条件. 曲面的上部空间参数组合引发系统混沌运动, 当c11接近0.5时, b值越大, 越易引发系统混沌. 根据Melnikov函数预测条件, 选取符合混沌临界参数c11 = 0.5, k33 = 1.5, g1 = 0.8, b = 0.6, ωb = 2, 计算单摆系统的混沌吸引子空间结构, 如图10所示. 图10中混沌吸引子呈现中心对称分布, 蓝色与红色分别代表单摆系统顺时针和逆时针运动的混沌吸引子, 运动过程中系统参数改变, 导致系统能量的交替变化, 使系统运动复杂化. 图11对应系统摆长变化的分岔, 随摆长l增大, 系统历经二周期、单周期、二周期、四周期到混沌运动的演化过程. 结合图10与图11, 系统在ωb = 2时的混沌吸引子是成对的两个旋转对称分岔点的余维.
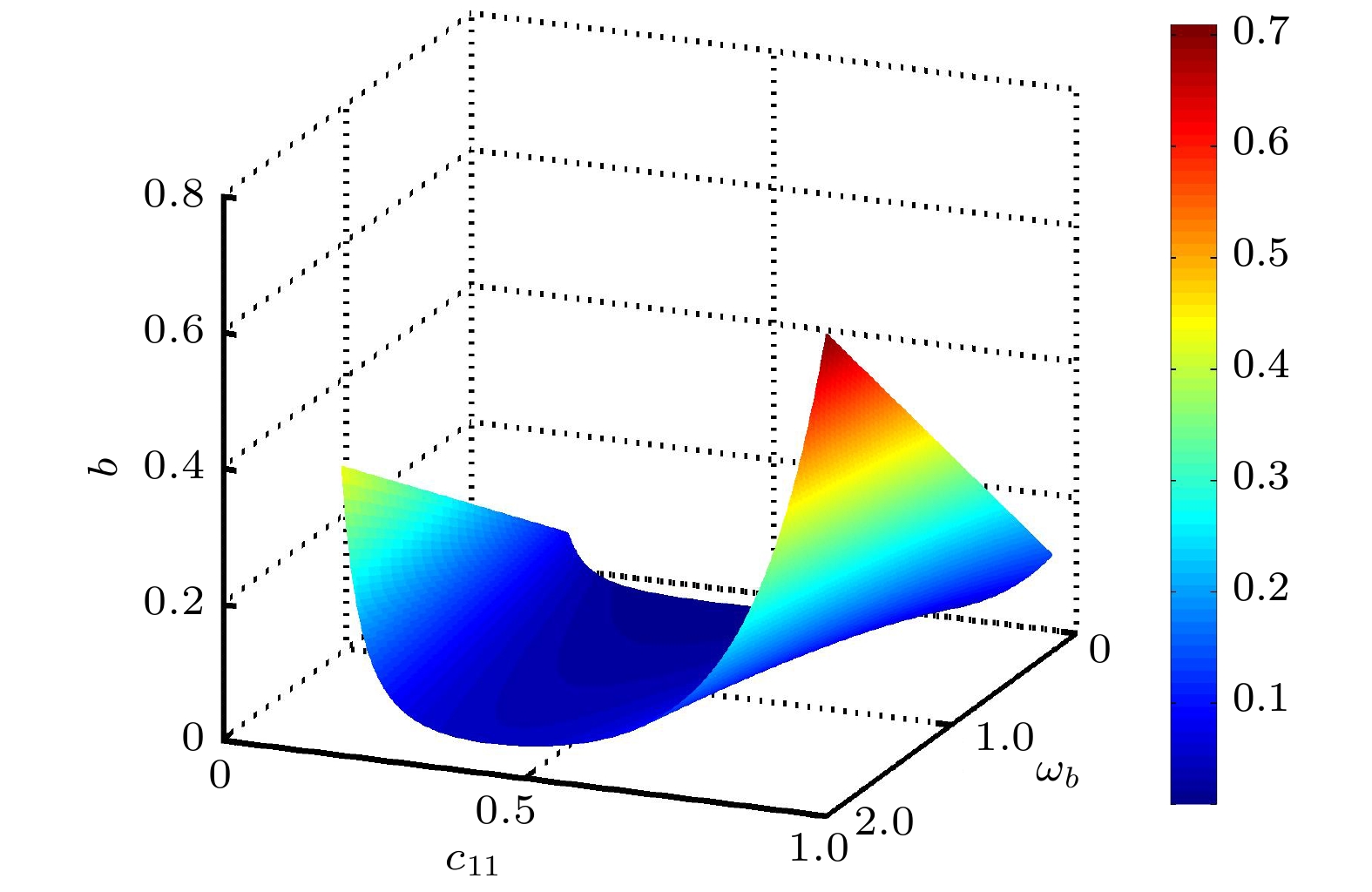 图 9 系统混沌运动的参数条件
图 9 系统混沌运动的参数条件Figure9. Parameter conditions for chaotic motion of the system
 图 10 单摆系统亚谐共振在ωb = 2时的混沌吸引子
图 10 单摆系统亚谐共振在ωb = 2时的混沌吸引子Figure10. Chaotic attractor of simple pendulum system when ωb = 2.
 图 11 摆长l变化下的分岔图
图 11 摆长l变化下的分岔图Figure11. Bifurcation diagram with different l.
2
5.1.受垂直激励和水平约束单摆系统的亚谐共振分岔与混沌
35.1.1.ωb对单摆系统分岔的影响
随ωb变化的单摆系统的运动分岔及最大Lyapunov指数如图12(a)和图12(b)所示. 可见, 随ωb增大, 单摆系统历经“单周期-二周期-四周期-混沌-四周期-混沌-二周期-混沌-四周期-二周期-单周期”的系列复杂运动变化, 且中间交替发生多次的倍周期分岔. 图 12 ωb变化下的(a)分岔和(b)最大Lyapunov指数
图 12 ωb变化下的(a)分岔和(b)最大Lyapunov指数Figure12. (a) Bifurcation and (b) maximum Lyapunov exponent with different ωb.
ωb变化的相图和时间历程如图13(a)—(f)所示. ωb = 0.5, 1.02, 1.8时, 系统分别处于单周期、二周期、混沌运动状态; 且ωb = 1.8的时间历程图(图14(a)—(c))显示出系统运动中较明显的交叠拍振共振行为, 伴随b (垂直位移激励幅值或摆长)变化, 系统能量也不断交替改变, 系统共振频次和振幅带宽都发生变化. 比较图13(d)—(f)发现, ωb变化改变了单摆的运动周期, 其变化过程与系统动力学行为(图13(a)—(c))相一致.
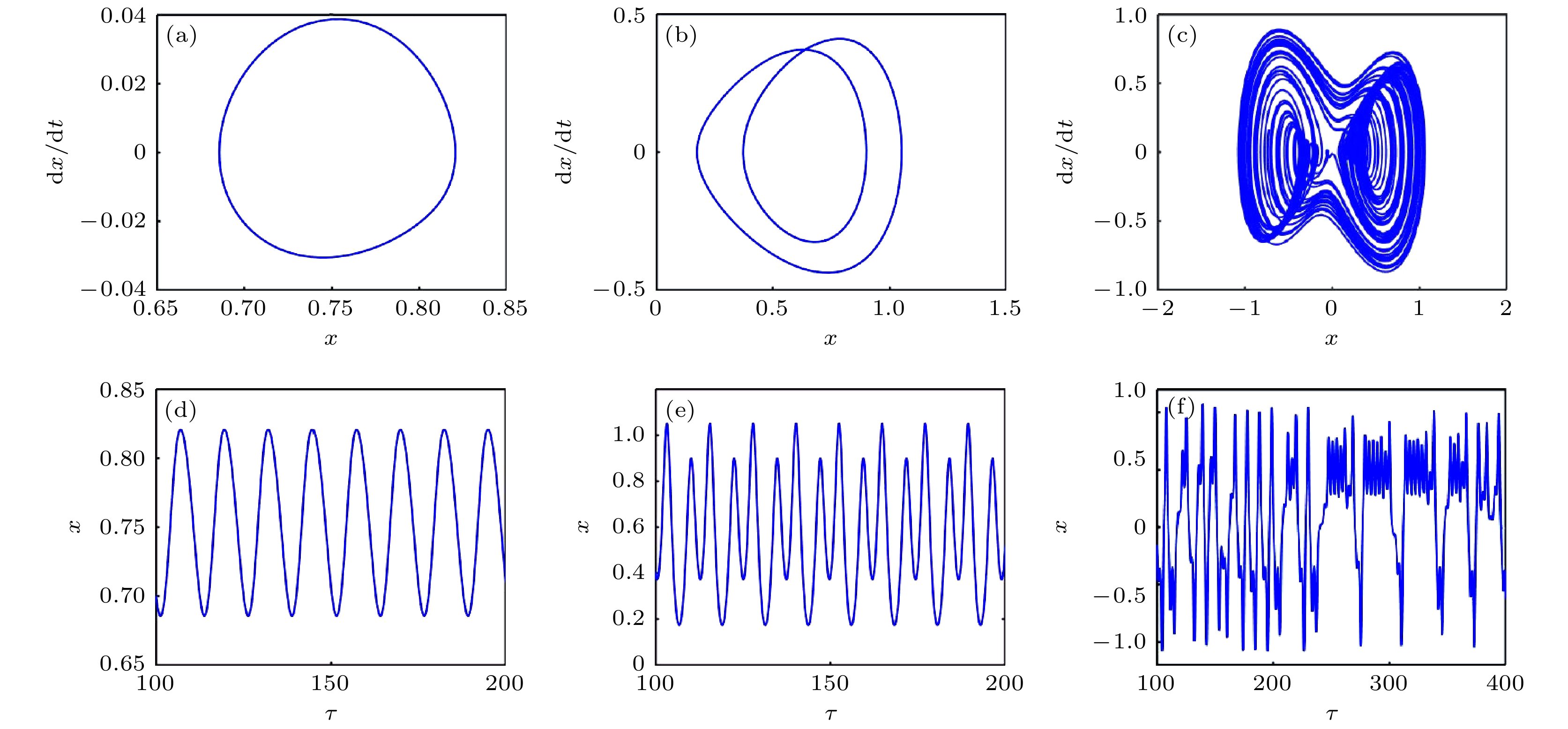 图 13 ωb变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) ωb = 0.5; (b), (e) ωb = 1.02; (c), (f) ωb = 1.8
图 13 ωb变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) ωb = 0.5; (b), (e) ωb = 1.02; (c), (f) ωb = 1.8Figure13. (a)?(c) Phase diagram and (d)?(f) time history diagram with different ωb : (a), (d) ωb = 0.5; (b), (e) ωb = 1.02; (c), (f) ωb = 1.8
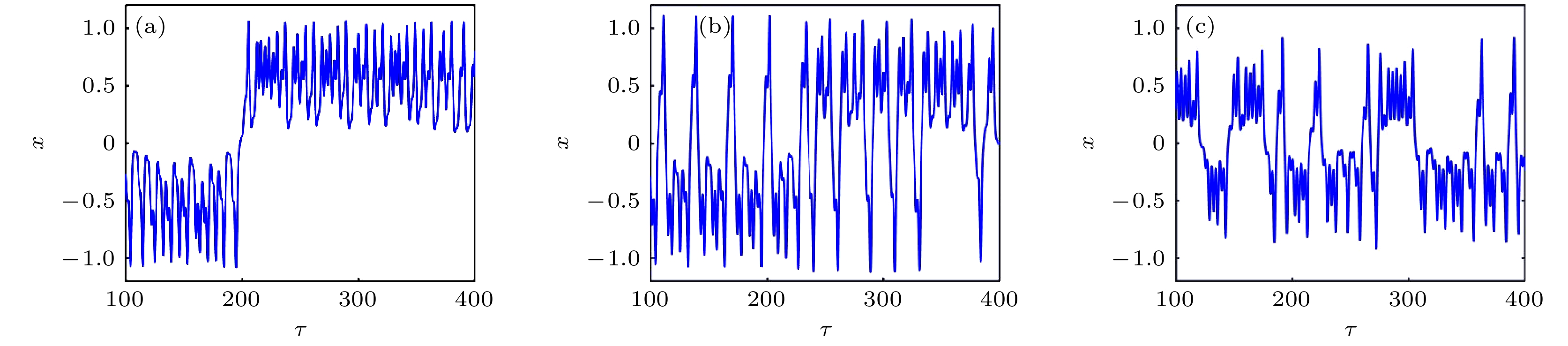 图 14 当ωb = 1.8时b变化下的时间历程图 (a) b = 0.28; (b) b = 0.38; (c) b = 0.58
图 14 当ωb = 1.8时b变化下的时间历程图 (a) b = 0.28; (b) b = 0.38; (c) b = 0.58Figure14. Time history diagram when b changes and ωb = 1.8: (a) b = 0.28; (b) b = 0.38; (c) b = 0.58.
3
5.1.2.c11对单摆系统分岔的影响
随c11变化的系统分岔和最大Lyapunov指数如图15(a)和图15(b)所示. 可见, 随水平约束阻尼系数c11增大, 系统历经“混沌-四周期-二周期-混沌-八周期-四周期-二周期-单周期”的系列复杂运动变化过程. 图 15 c11变化下的(a)分岔和(b)最大Lyapunov指数
图 15 c11变化下的(a)分岔和(b)最大Lyapunov指数Figure15. (a) Bifurcation and (b) maximum Lyapunov exponent with different c11.
c11变化的相图和时间历程如图16(a)—(f)所示. 其中图16(a)—(f)中, c11 = 0.6, 0.63, 1.2时, 系统分别处于双曲混沌、混沌、单周期运动状态; c11 = 0.6, 系统表现为左右两中心的相轨迹被鞍点所吸引的双曲混沌; c11 = 0.63, 系统表现出对称性降低, 有序性增加的混沌态. 随c11继续增大, 系统由倒倍周期分岔发展为c11 = 1.2的单周期运动. 比较图16(d)—(f)发现, c11变化改变了水平约束单摆系统的运动周期, 其变化过程与系统动力学行为(图16(a)—(c))相一致.
 图 16 c11变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) c11 = 0.6; (b), (e) c11 = 0.63; (c), (f) c11 = 1.2
图 16 c11变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) c11 = 0.6; (b), (e) c11 = 0.63; (c), (f) c11 = 1.2Figure16. (a)?(c) Phase diagram and (d)?(f) time history diagram with different c11: (a), (d) c11 = 0.6; (b), (e) c11 = 0.63; (c), (f) c11 = 1.2.
3
5.1.3.g1对单摆系统分岔的影响
随g1变化的系统分岔图及最大Lyapunov指数曲线如图17(a)和图17(b)所示. 可见, 随g1增大, 单摆系统历经“混沌-四周期-二周期-单周期”的运动状态改变. g1取不同值的相图和时间历程如图18所示. 其中图18(a)—(c), 随系统历经双曲混沌、混沌、二周期等运动状态的改变, 这与图18(d)—(f)中, g1变化引起的系统动力学行为相一致. 图 17 g1变化下的(a)分岔和(b)最大Lyapunov指数
图 17 g1变化下的(a)分岔和(b)最大Lyapunov指数Figure17. (a) Bifurcation and (b) maximum Lyapunov exponent with different g1.
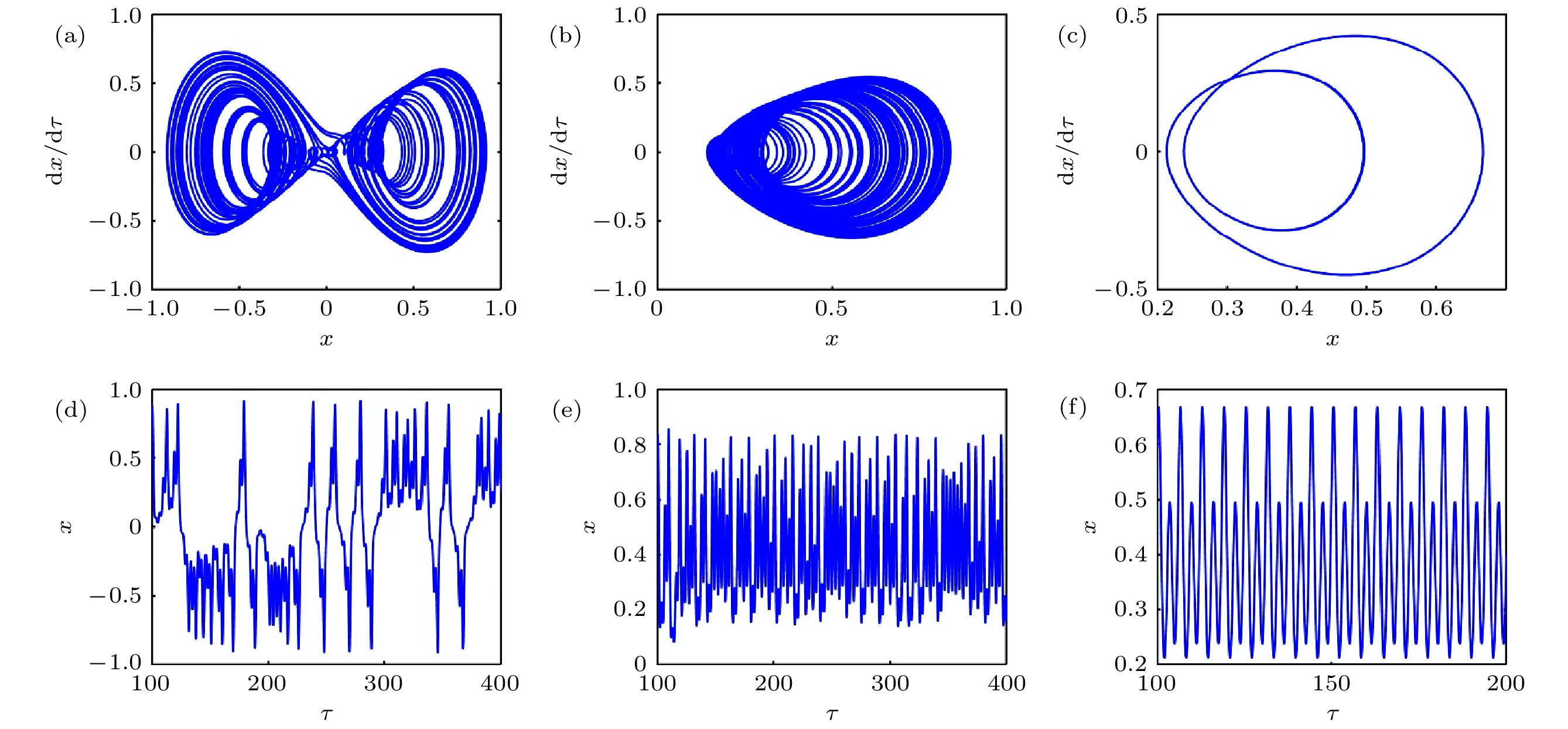 图 18 g1变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) g1 = 0.27; (b), (e) g1 = 0.28; (c), (f) g1 = 0.36
图 18 g1变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) g1 = 0.27; (b), (e) g1 = 0.28; (c), (f) g1 = 0.36Figure18. (a)?(c) Phase diagram and (d)?(f) time history diagram with different g1: (a), (d) g1 = 0.27; (b), (e) g1 = 0.28; (c), (f) g1 = 0.36.
3
5.1.4.k33对单摆系统分岔的影响
随k33变化的系统分岔及最大Lyapunov指数曲线如图19(a)和图19(b)所示. 随k33增大, 系统历经“单周期-二周期-四周期-八周期-混沌”系列运动状态的改变过程. 随k33变化的相图和时间历程如图20所示. 其中图20(a)—(c), k33 = 0.6, 1.2, 1.4时, 系统分别处于四周期、混沌、双曲混沌运动. 随k33变化, 单摆的周期性也发生改变如图20(d)—(f), 其变化过程与系统动力学行为(图20(a)—(c))相一致. 图 19 k33变化下的(a)分岔和(b)最大Lyapunov指数
图 19 k33变化下的(a)分岔和(b)最大Lyapunov指数Figure19. (a) Bifurcation and (b) maximum Lyapunov exponent with different k33..
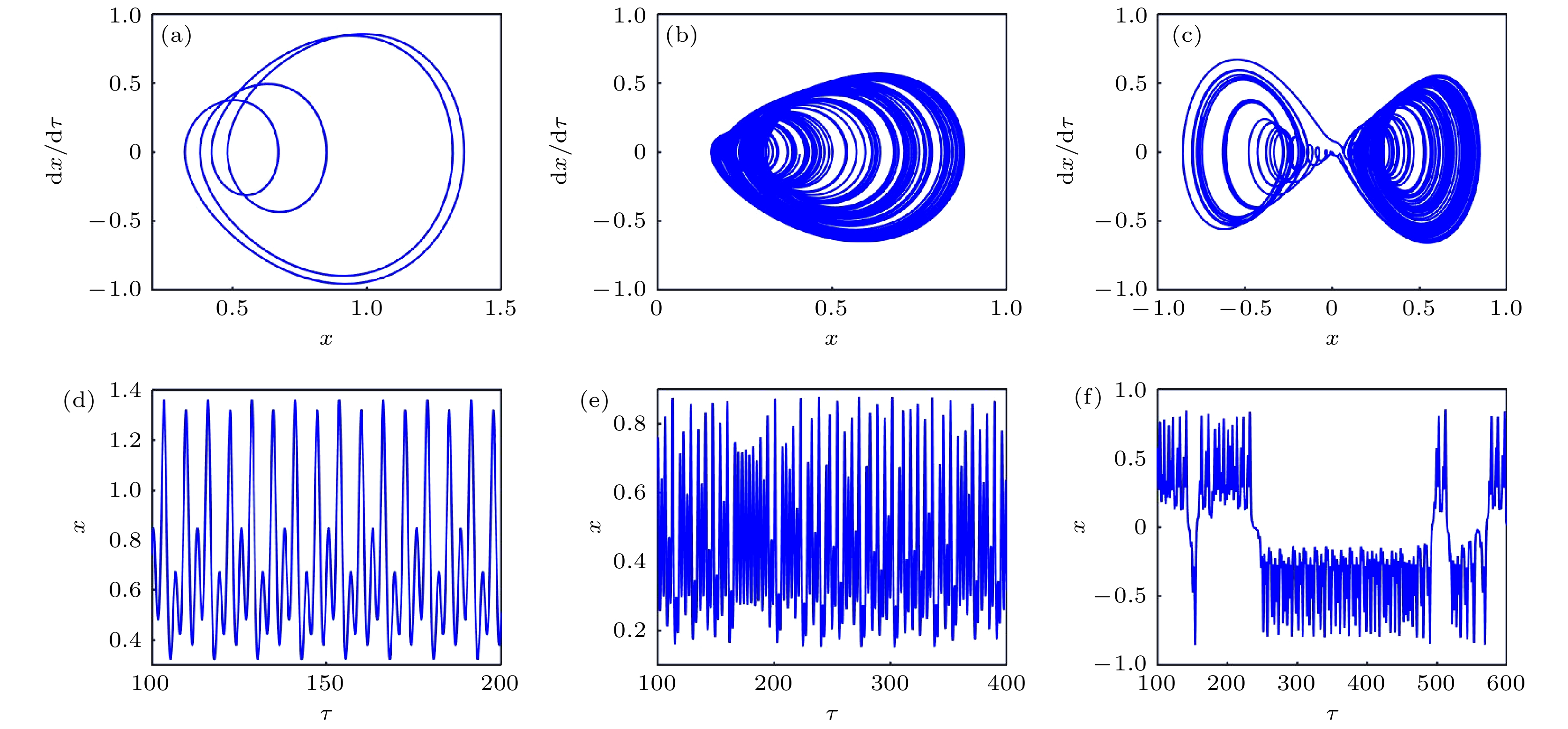 图 20 k33变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) k33 = 0.6; (b), (e) k33 = 1.2; (c), (f) k33 = 1.4
图 20 k33变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) k33 = 0.6; (b), (e) k33 = 1.2; (c), (f) k33 = 1.4Figure20. (a)?(c) Phase diagram and (d)?(f) time history diagram with different k33: (a), (d) k33 = 0.6; (b), (e) k33 = 1.2; (c), (f) k33 = 1.4
3
5.1.5.b对单摆系统分岔的影响
随b变化单摆系统的运动分岔及最大Lyapunov指数如图21(a)和图21(b)所示. 可见, 随b增加, 单摆系统历经“单周期-二周期-四周期-混沌-四周期-二周期-单周期”的系列复杂运动变化.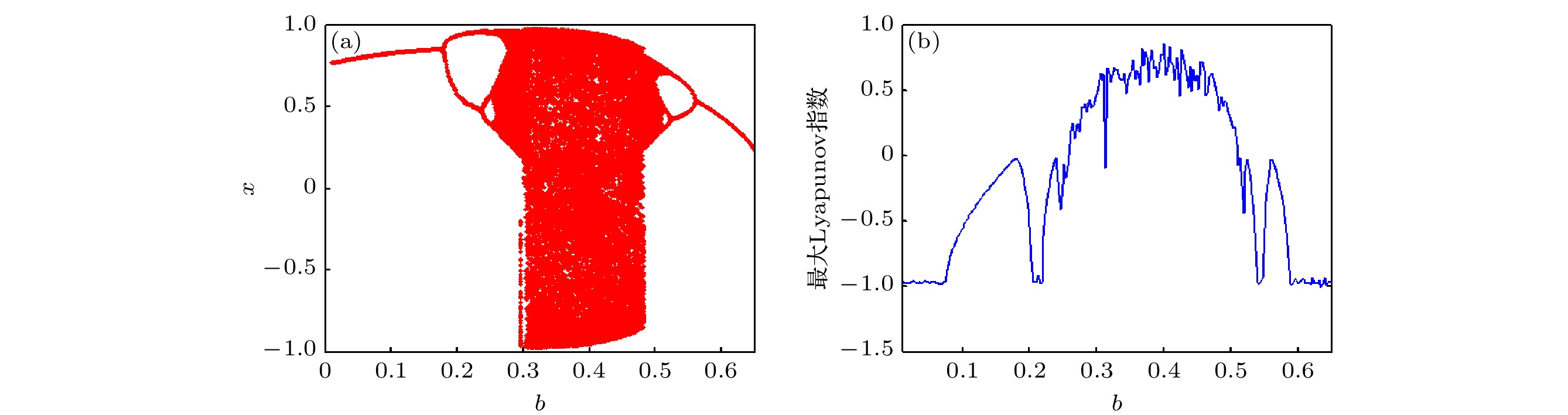 图 21 b变化下的(a)分岔和(b)最大Lyapunov指数
图 21 b变化下的(a)分岔和(b)最大Lyapunov指数Figure21. (a) Bifurcation and (b) maximum Lyapunov exponent with different b.
b变化的相图和时间历程如图22(a)—(f)所示. 其中图22(a)—(f)中, b = 0.19, 0.28, 0.36系统分别处于二周期、混沌、双曲混沌的运动状态. b = 0.36的时间历程图(图23(a)—(c))显示出系统运动中较明显的交叠拍振共振行为, 伴随ωb变化, 系统能量也不断交替改变, 系统共振频次和振幅带宽都发生变化. 比较图22(d)—(f)发现, b变化改变了单摆的运动周期, 其变化过程与系统动力学行为(图22(a)—(c))相一致.
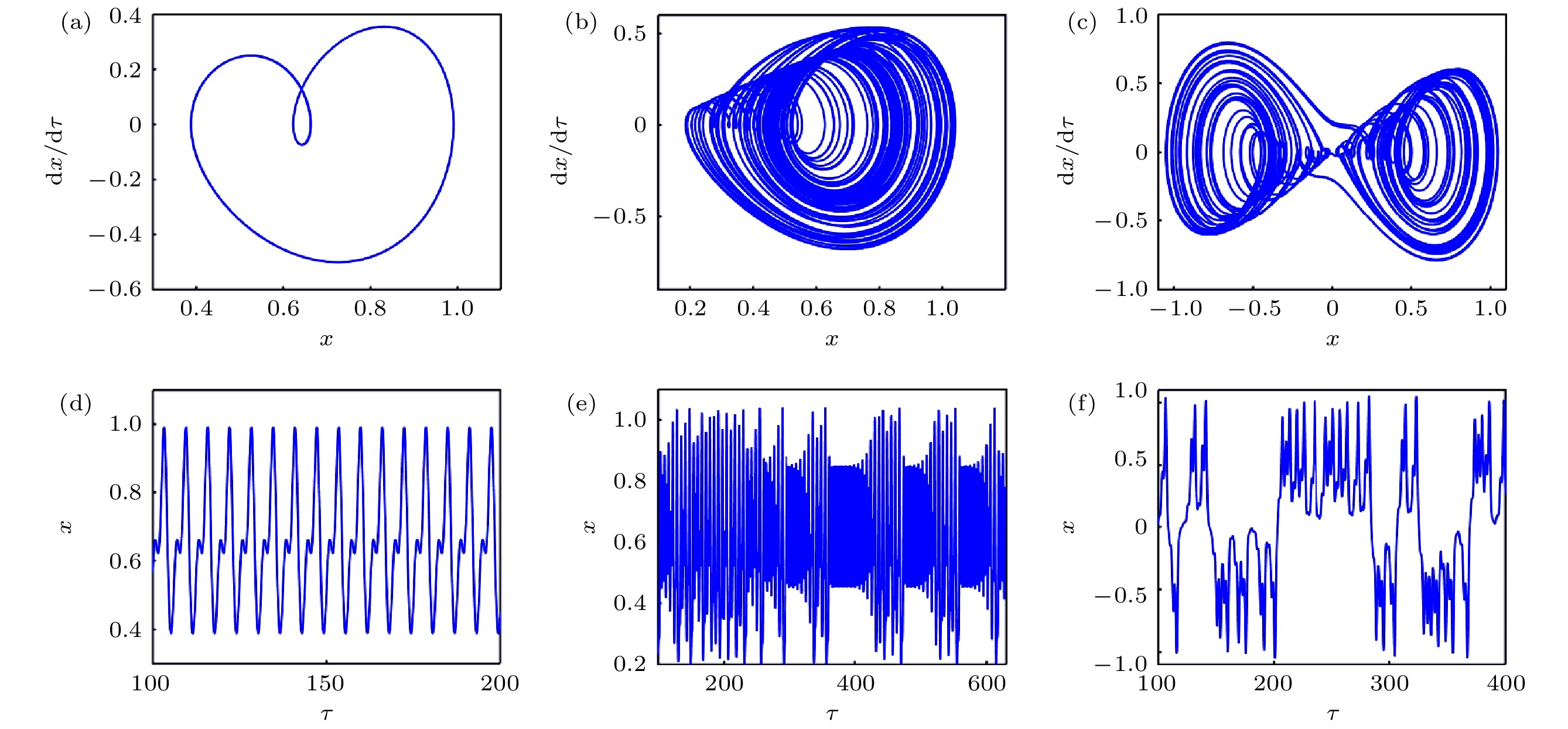 图 22 b变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) b = 0.19; (b), (e) b = 0.28; (c), (f) b = 0.36
图 22 b变化下的(a)?(c)相图和(d)?(f)时间历程图 (a), (d) b = 0.19; (b), (e) b = 0.28; (c), (f) b = 0.36Figure22. (a)?(c) Phase diagram and (d)?(f) time history diagram with different b: (a), (d) b = 0.19; (b), (e) b = 0.28; (c), (f) b = 0.36
 图 23 当b = 0.36时ωb变化下的时间历程图 (a) ωb = 1.3 (b) ωb = 1.5; (c) ωb = 1.7
图 23 当b = 0.36时ωb变化下的时间历程图 (a) ωb = 1.3 (b) ωb = 1.5; (c) ωb = 1.7Figure23. Time history diagram when ωb changes and b = 0.36: (a) ωb = 1.3; (b) ωb = 1.5; (c) ωb = 1.7.
2
5.2.受垂直激励和水平约束单摆系统的亚谐共振双参分析
通过分析方程(6)随相关变量的双参组合, 研究受垂直激励和水平约束的单摆系统在双参量耦合变化下的动力行为演化, 映射双参域变化下的单摆系统分岔运动特性.参数ωb耦合c11的系统运动特性如图24(a)所示. 在区域“Ch1”, “Ch2”和“Ch3”的组合取值, 反映系统运动做混沌运动; 其他区域组合取值, 系统做周期运动. 图24(a)中, 考虑参量的一维变化, 沿“L1”路径变化参数ωb, 系统运动状态变化过程与图12一致; 沿着“L2”路径变化参数c11, 系统运动状态变化过程与图15一致, 这也在一定程度上佐证了单参数分岔对系统运动改变的结果.
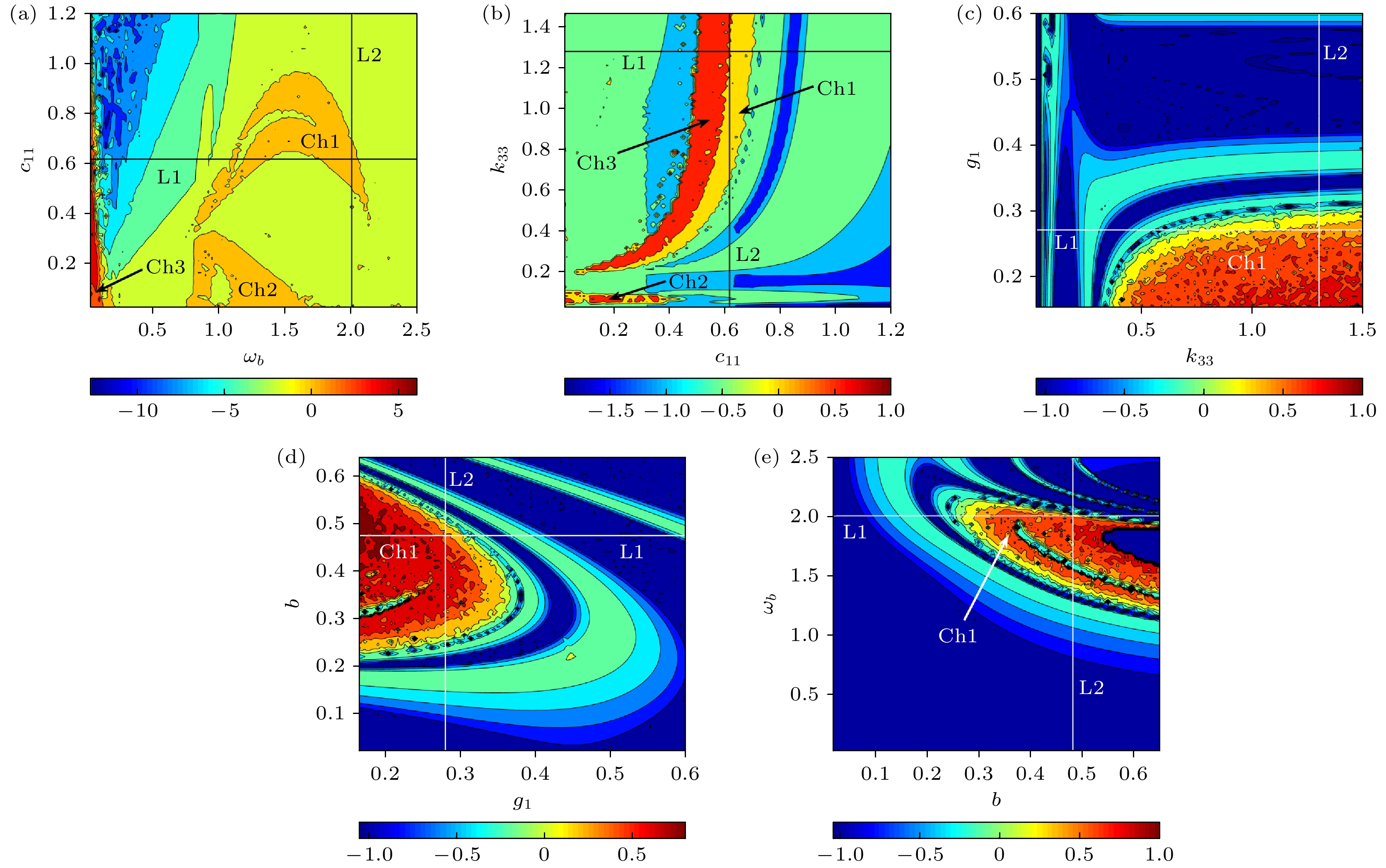 图 24 单摆非线性系统在双参数域上的运动 (a) ωb-c11; (b) c11-k33; (c) k33-g1; (d) g1-b; (e) b-ωb
图 24 单摆非线性系统在双参数域上的运动 (a) ωb-c11; (b) c11-k33; (c) k33-g1; (d) g1-b; (e) b-ωbFigure24. Motion of a simple pendulum nonlinear system in the bi-parameter domain: (a) ωb-c11; (b) c11-k33; (c) k33-g1; (d) g1-b; (e) b-ωb
参数c11耦合k33的系统运动特性如图24(b)所示. 区域“Ch3”组合取值会导致系统运动的不稳定性比区域“Ch1”, “Ch2”大; 当c11, k33在“Ch1”, “Ch2”和“Ch3”区域边缘组合取值时, 会导致系统运动由混沌转向周期运动.
参数k33耦合g1的系统运动特性如图24(c)所示. 区域“Ch1”内组合取值, 最大Lyapunov指数为正, 系统做混沌运动. 参数g1耦合参数b的系统运动特性如图24(d)所示. 区域“Ch1”内组合取值, 系统最大Lyapunov指数大于零, 系统做混沌运动, 当g1和b在其他区域内组合取值时, 最大Lyapunov指数为负, 系统做周期运动.
参数b耦合参数ωb组合的系统运动特性如图24(e)所示. 区域“Ch1”内组合取值, 系统最大Lyapunov指数为正, 系统做混沌运动; 当b和ωb的组合取值在“Ch1”区域边界时, 系统最大Lyapunov指数在0附近变动, 系统发生混沌和周期运动的转换.
上述对受垂直激励和水平约束的单摆系统在双参数域上的运动特性分析, 明确了参数ωb, c11, k33, g1和b的组合取值对系统运动状态的影响, 系统发生周期运动与混沌运动的转换边界, 系统最大Lyaounov指数发生穿越0的突变, 系统动力特性也变得复杂.
研究参数b改变对受垂直激励和水平约束的单摆非线性系统的吸引子、吸引域的影响, 揭示单摆系统运动过程中能量变化影响下的全局动力特性. 参数b变化引发的单摆系统吸引子、吸引域的转迁如图25所示.
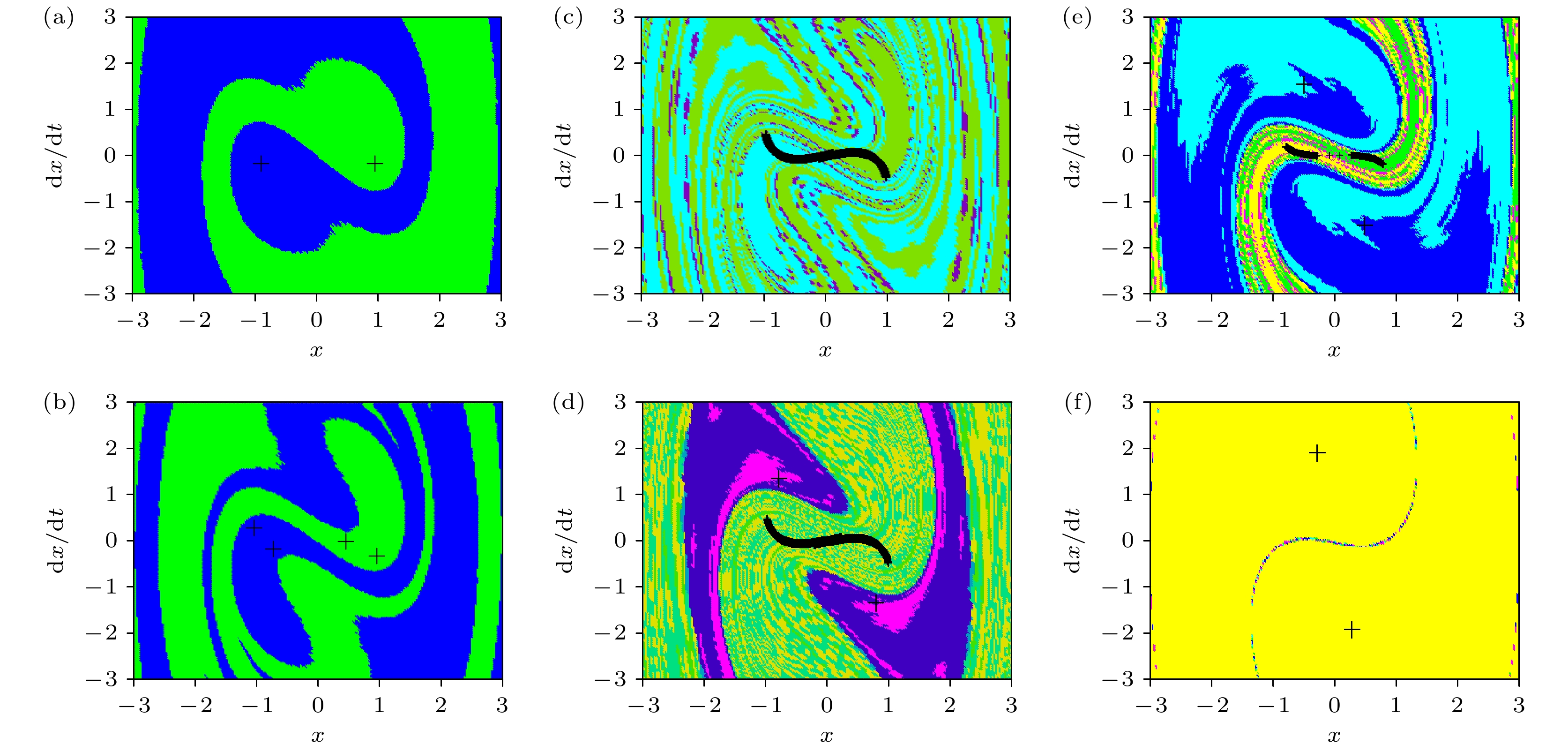 图 25 系统在参数b变化时的吸引子、吸引域 (a) b = 0.11; (b) b = 0.23; (c) b = 0.32; (d) b = 0.35; (e) b = 0.49; (f) b = 0.81
图 25 系统在参数b变化时的吸引子、吸引域 (a) b = 0.11; (b) b = 0.23; (c) b = 0.32; (d) b = 0.35; (e) b = 0.49; (f) b = 0.81Figure25. Attractor and attraction domain of the system when the parameter b changes: (a) b = 0.11; (b) b = 0.23; (c) b = 0.32; (d) b = 0.35; (e) b = 0.49; (f) b = 0.81.
b = 0.11的吸引域如图25(a)所示. 此时系统存在两个周期吸引子, 且每个吸引子所在的吸引域(蓝色和绿色)边界清晰, 二者相互缠绕, 系统处于稳定运动状态; 如图25(b)所示, 随b增大至b = 0.23时, 周期吸引子倍增, 存在4个周期吸引子, 每两个周期吸引子所在吸引域(蓝色和绿色)边界清晰, 吸引域带宽变窄, 还有进一步稀疏的演化趋势, 这些都在一定程度上反映出b的改变会诱发单摆系统内部稳定域的变化.
b = 0.32的吸引域如图25(c)所示. 系统历经倍周期分岔运动的极限位置到达边界, 系统的运动状态发生激变, 出现混沌吸引子, 系统能量的改变导致单摆的运动失稳. 如图25(d)所示的b = 0.35, 系统内部继续激变, 混沌吸引子所在的吸引域区域减少, 出现周期吸引子, 并且两个周期吸引子及其所在的吸引域中心对称分布, 反映出垂直激励引发的能量改变激发出单摆系统的周期吸引子与混沌吸引子共存, 系统所表现出的运动形式则取决于初始状态.
b = 0.49的吸引域如图25(e)所示. 混沌吸引子分散, 所在的吸引域变窄, 密集程度降低, 并且周期吸引子和混沌吸引子共存, 两个周期吸引子所在的吸引域面积增大, 该条件下垂直激励引发的能量变化激发出单摆系统的周期吸引子聚集, 系统所表现出的运动形式依然与初始状态密切相关. b = 0.81的吸引域如图25(f)所示, 系统存在两个周期吸引子, 且两个周期吸引子所在的吸引域相互环绕, 呈中心对称分布, 系统处于周期运动状态, 反映出垂直激励所引起的能量变化引起单摆系统周期吸引子能量增大, 系统主要表现为周期运动.
可见, 参数b变化改变了系统中的能量分布, 导致系统周期吸引子倍增, 混沌吸引子出现, 系统经历倍周期分岔通向混沌; 当系统在周期吸引子和混沌吸引子共存条件下, 各自吸引域边界会因系统能量变化, 不断发生边界的侵蚀、融合的复杂过程. 在混沌吸引子消失后, 周期吸引子及其吸引域中心对称分布, 这都在一定程度上反映出单摆系统能量影响下的全局动力特性.
1)增大水平约束阻尼系数和三次方刚度系数, 有利于减小单摆系统共振幅值; 增大水平约束阻尼系数可减小单摆系统共振区域带宽; 增大垂直位移激励幅值将增大系统共振幅值、增加共振区域带宽.
2)对该系统的单参分岔研究表明, 垂直位移激励幅值、激励频率、水平约束阻尼系数和三次方刚度系数等参数变化, 都将导致系统运动特性的改变, 这与传统单摆中的阻尼对运动过程无影响结论不同. 上述参量变化, 本质上改变了系统中的能量分布, 使得单摆系统发生倍周期分岔、倒倍周期分岔、周期运动和混沌运动等动力学行为.
3)对系统在不同参量条件下的相轨迹和时间历程的分析, 表明方程(6)中的g1相当于关联了系统摆长和运动周期的耦合项, 无论摆长还是运动周期使得系统能量降低, 系统都会通过参数g1的耦合, 使得能量发生转换, 维持系统振动.
4)对该系统的双参数域分岔研究表明, 通过合适选择系统参数, 可有效控制该系统的振动行为, 并且通过参数的匹配优选能有效避免混沌的发生. 进一步通过对系统吸引子、吸引域的分析, 揭示了系统能量变化对运动形态的演化机理.
上述结论为受垂直激励和水平约束的单摆模型的工程应用提供重要理论依据, 同时对实际工况下的减振抑振提供了理论参考.
