全文HTML
--> --> -->近年来, 拉曼光谱逐渐应用于深海极端环境的原位探测[2], 用于深海热液物质成分识别和流体中各成分的原位浓度定量分析领域[3]. 若可以实现热液流速测量, 可以为海底热液输出的物质通量分析提供有效测试手段, 为热液成矿条件和成矿速率勘测提供重要参考, 还可以了解潮汐作用、构造作用、岩浆作用和地震等地质作用规律, 研究海底生物群落的分布规律. 海底热液流速测量在地质、海洋和生态学等多个领域都具有重要的应用价值.
流速测量方法, 主要有基于机械、电磁及动压测压法的接触式测量[4-6], 以及基于声学多普勒技术(ADV)、激光多普勒技术(LDV)[7-18]和光学成像分析方法的非接触式测量[19-21]. 接触式测量设备易干扰待测点流速, 且易受热液高温、颗粒物等影响, 因而限制了其使用. 而基于ADV流速测量仪器存在无法直观看到其测量点的缺点, 且空间分辨率不是太高. 而光学成像分析法需要用CCD相机记录下流动区域中示踪粒子的图像, 因此流场需相对透明. 目前深海的流速测量方式主要为深海船载走航式声学多普勒流速剖面仪[22], 实现海流观测, 而对于深海热液流速的测量还未见报道. 高温热液喷口的原位探测一直是世界性技术难题, 由于苛刻的高温、高压、强酸(碱)和浑浊的流体环境, 深海高温热液喷口一直被认为是光学镜头的禁区. 因此, 在深海热液研究中, 迫切需要一种非接触式、受温度场影响小、精度更高的流速测量手段, 光学多普勒技术可以满足该迫切需求.
本文研发了一套适合深海原位测量的4000 m级激光多普勒热液流速测量系统, 实现海底热液喷口流速的准确测量, 为物质输出通量、热液成矿条件和成矿速率勘测等研究提供关键技术支撑.
2.1.系统装置
整个激光多普勒深海原位热液流速测量系统示意图如图1所示, 该系统设计从实际应用需求出发, 以实用性、便携性、高灵敏、抗干扰为设计方向. 采用一体化整体集成式设计, 系统由光源系统、激光多普勒光学与信号处理系统组成, 封装于L500 mm × Φ250 mm的钛合金耐压舱中形成一体化光学测量探头, 并用深海耐压电缆与蛟龙号进行连接. 该系统固定放置于采样篮内, 下潜至目标位置后, 由载人潜水器机械手对其进行控制, 移向热液喷口附近进行热液流速测量. 图 1 激光多普勒深海原位热液流速测量系统结构示意图
图 1 激光多普勒深海原位热液流速测量系统结构示意图Figure1. Structure diagram of laser Doppler in situ hydrothermal velocity measurement system.
激光器、光学与信号处理系统被一体放置与耐压舱中, 其中激光器位于最上方提供光源, 光路模块由于承担发射光和接受光的功能, 被布置与耐压舱的中间层, 并与蓝宝石透光窗口同径, 信号解调模块置于耐压舱中最下层, 通过后端盖的水密接头与蛟龙号进行连接. 系统采用适用于海水测量的传输损耗小、低相位噪声、低强度噪声的单频窄线宽绿光光纤激光器, 激光多普勒信号由光电探测器采集, 经过高速互阻抗平衡探测电路、缓冲放大、滤波之后通过模数转换电路转化为数字信号, 数字信号的处理采用集成了ARM处理器内核与FPGA的SoC主控芯片及eMMC高速存储器作为设计方案, 实现傅里叶变换、数据写入、频率检测、流速计算及接口驱动的程序编写. 最终利用RS232协议传递控制信号和数据, 实现在蛟龙号机舱内显示信号频谱信息及实时流速信息, 并实时诊断设备工作状态.
2
2.2.检测原理
已有激光多普勒测速仪主要采用双光束-双散射模式, 但由于利用流体中颗粒的散射光获取速度信息, 散射光强度比较微弱, 特别是在只能利用强度更弱的后向散射光的场合, 信号的拾取比较困难. 另外, 若双光束的平分线与所测速度没有完全垂直, 则会引入测量误差. 最后, 双光束方案中要求探测光在待测点严格交叉, 导致此类系统对光机稳定性要求极高, 在部分严苛环境, 如水下高压环境、跨界面测量且存在一定界面波动条件下使用时稳定性受限, 本文首次提出了一种强本振型双光束激光多普勒测速系统.强本振型多普勒测速系统的原理如图2所示, 其构成包括激光器、耦合器、准直器、分束棱镜、反射镜、凸透镜、缩束透镜组、声光调制器、离轴抛物面镜、汇聚透镜、光电探测器等. 利用光纤耦合器将窄线宽绿光激光器的输出光束分为两束, 分别作为本振光束和测量光束. 测量光束经分束棱镜形成强度相等的双光束, 聚焦照射到微粒上, 形成携带流速信息的散射信号光束. 本振光束经过光纤声光调制器产生

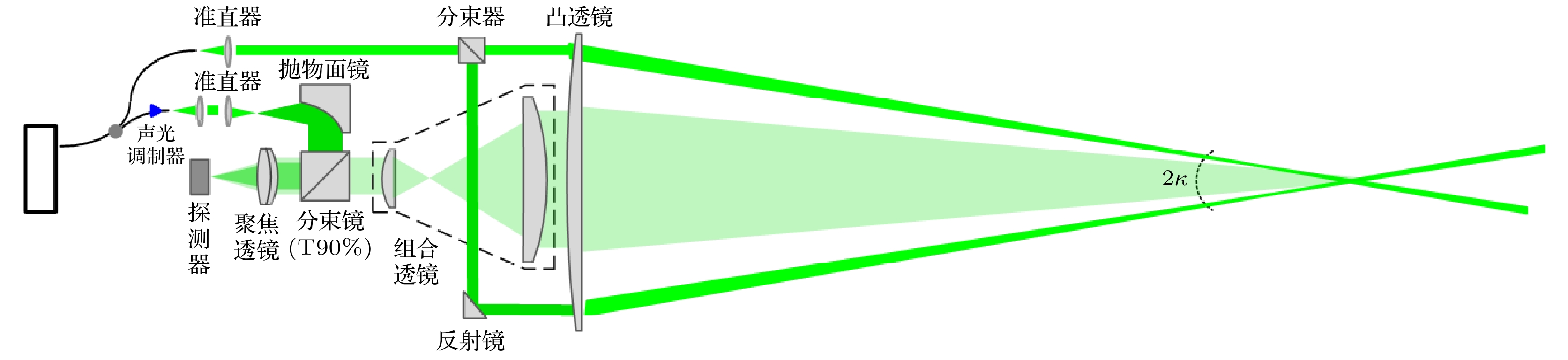 图 2 强本振型激光多普勒测速系统光路图
图 2 强本振型激光多普勒测速系统光路图Figure2. Optical path diagram of laser Doppler velocimetry system.
以上结构中, 激光器的输出光经过光纤耦合器分为两束, 分别作为本振光束和测量光束. 其中本振光束经过光纤声光调制器产生频移, 测量光束入射到半透半反的分束棱镜上, 被分成两束强度相等的平行激光入射到凸透镜后, 汇聚到一点, 粒子垂直于两汇聚光束的平分线通过此聚焦点, 受待测速粒子运动的影响, 照射到粒子上的两束激光的频率都产生多普勒频移; 由于两束汇聚激光束与运动粒子方向的夹角不同, 两束散射光所产生的多普勒频移量也不同. 因此两束散射光被探测器收集后, 与到达探测器的本振光束产生的拍频信号有两个多普勒频移, 利用这两个多普勒频移计算待测流体的速度.
入射双光束照射到粒子上形成的两束散射光与参考光被探测器PD接收, 产生拍频信号, 如图3所示. 若速度

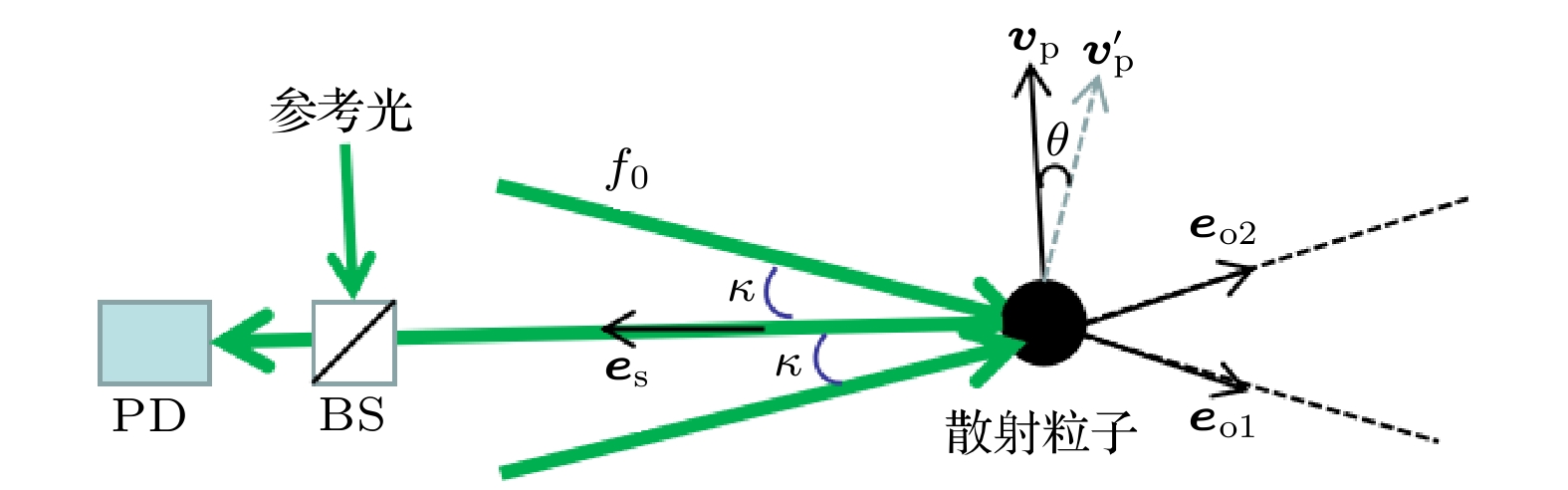 图 3 强本振型测速系统接收光路示意图
图 3 强本振型测速系统接收光路示意图Figure3. Schematic diagram of receiving optical path of velocimeter.













为了验证强本振型激光多普勒测速方法的可行性, 选用转速可调的转盘作为待测物体, 选择转盘上的点作为测试点, 测量此点的切线方向的速度. 利用信号频谱中的两个频移峰, 由(6)式和(7)式计算得转盘上一点的切向速度为9.1969 m/s, 此速度方向与双光束平分线垂直方向夹角θ = 24.40o. 作为对比, 测量转盘旋转频率为17.36 Hz, 检定旋转半径r = 0.084 m, 计算速度为9.1577 m/s, 测量结果与实际运动速度吻合较好, 测量误差在0.43%. 若采用经典的双光束激光多普勒测速系统, 由于只能测量双光束平分线垂直方向上的速度分量, 测量误差达到8.9%. 因此强本振型激光多普勒测速减小了由于系统位置偏转带来的测量误差.
图4描绘了双光束平分线的垂直线与流速的夹角θ = 10o 时, 系统测量速度与转盘旋转频率间的关系, 并绘出由旋转频率和检定半径确定的计算速度, 测量值与计算值吻合较好, 最大测量误差为4.4%. 由(6)式和(7)式可知,





 图 4 速度与转盘旋转频率间的关系
图 4 速度与转盘旋转频率间的关系Figure4. Relationship between speed and turntable rotation frequency.
为了验证激光多普勒系统测量水流速度的准确性, 在中国水利水电科学研究院, 利用超声波多普勒流速仪对0.01—0.2 m/s的低速段流速进行比对测试. 超声波多普勒流速仪(ADV)的流速测量范围为0—3 m/s, 测量精度为 ± 0.5%, 采样频率为100 Hz. 测试时, 超声波多普勒流速仪垂直固定在水槽上方的测试架上, 探头水平安装. 激光多普勒深海热液流速测量系统(LDV)安装在水槽一侧, 系统发射的两束激光通过水槽有机玻璃侧壁射入水中, 两束激光焦点汇聚于水槽中心, 距超声波多普勒流速仪测点上游1 cm处, 设备的安装测试图如图5(a)所示. 分别设定12个速度节点, 流速稳定后, 同时采样测量, 每次采样时长3 min, 测试结果如图5(b)所示, 激光多普勒深海热液流速测量系统与超声波多普勒流速仪测量流速值最大相对测量误差为–9.43%. 误差产生的原因为水槽中水流的稳定性具有相对性, 并且ADV所测流速为测量体积(L10 mm × Φ15 mm)内的平均速度, 而LDV为点式测量, 空间分辨率为几十微米量级.
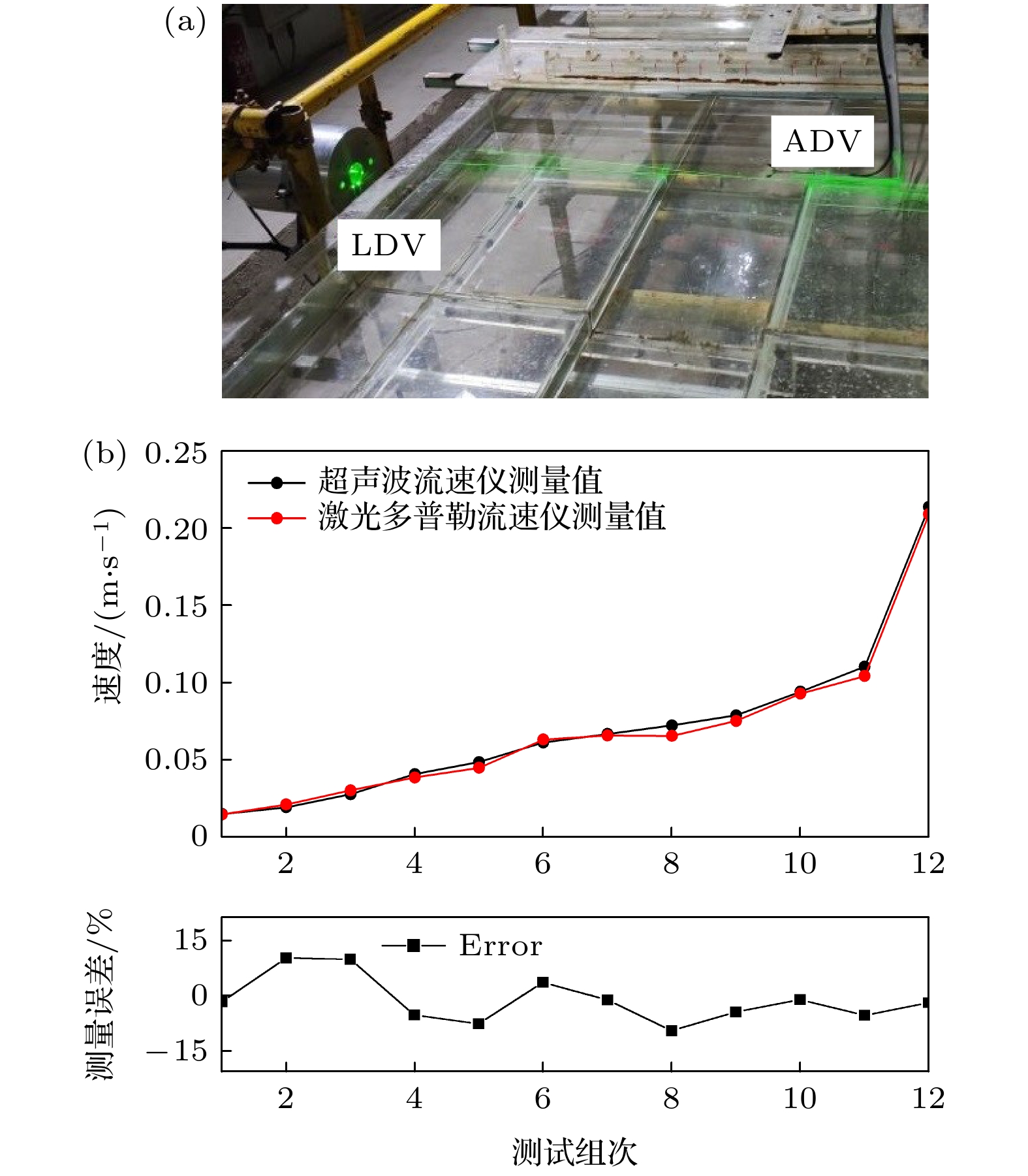 图 5 激光多普勒深海热液流速测量系统与超声波流速仪对比测试 (a)低流速对比设备安装图; (b)低流速对比测试结果及误差
图 5 激光多普勒深海热液流速测量系统与超声波流速仪对比测试 (a)低流速对比设备安装图; (b)低流速对比测试结果及误差Figure5. Comparison test of laser Doppler velocimetry system and acoustic Doppler velocimeter: (a) Equipment installation diagram of low-speed comparison; (b) low-speed comparison test results and errors.
利用喷咀法对1—10 m/s的高速段流速进行比对测试, 系统的特殊装置保证喷口流速均匀分布, 测试时仪器安装于喷咀上方, 系统发出两束激光交叉于水中, 如图6(a)所示. 喷咀标准流速系统分别设定14个速度节点, 激光多普勒流速测量系统测量喷口处的流速. 目前此流速标定装置最高流量为302 L/s, 折合为9.7 m/s, 喷咀标准流速系统设定的速度值与激光多普勒流速系统所测数据进行比较, 试验结果表明系统在高速段最大测量误差为1.65%, 如图6(b)所示. 此流速段平均相对测量误差较小, 喷咀标准流速系统喷口处的流速稳定, 误差产生的原因主要是高流速段频谱展宽影响所致.
 图 6 激光多普勒深海热液流速测量系统与标准喷咀流速系统对比测试 (a)高速对比设备安装图; (b)高流速对比测试结果及误差
图 6 激光多普勒深海热液流速测量系统与标准喷咀流速系统对比测试 (a)高速对比设备安装图; (b)高流速对比测试结果及误差Figure6. Comparison test of laser Doppler velocimetry system and standard nozzle flow system: (a) Equipment installation diagram of high-speed comparison; (b) high-speed comparison test results and errors.
基于以上试验结果, 在海南陵水对激光多普勒深海热液流速测量系统进行浅海实验, 吊车下放系统到达水下50 m处, 系统测量此过程中的下降速度, 速度数据获取正常. 将系统悬挂在船尾, 对系统随船的拖拽速度进行测量, 并与声学多普勒测速系统所测速度值进行对比, 所测拖拽速度随时间变化关系曲线如图7所示, 结果表明两者测试的拖拽速度相对误差为8.4%.
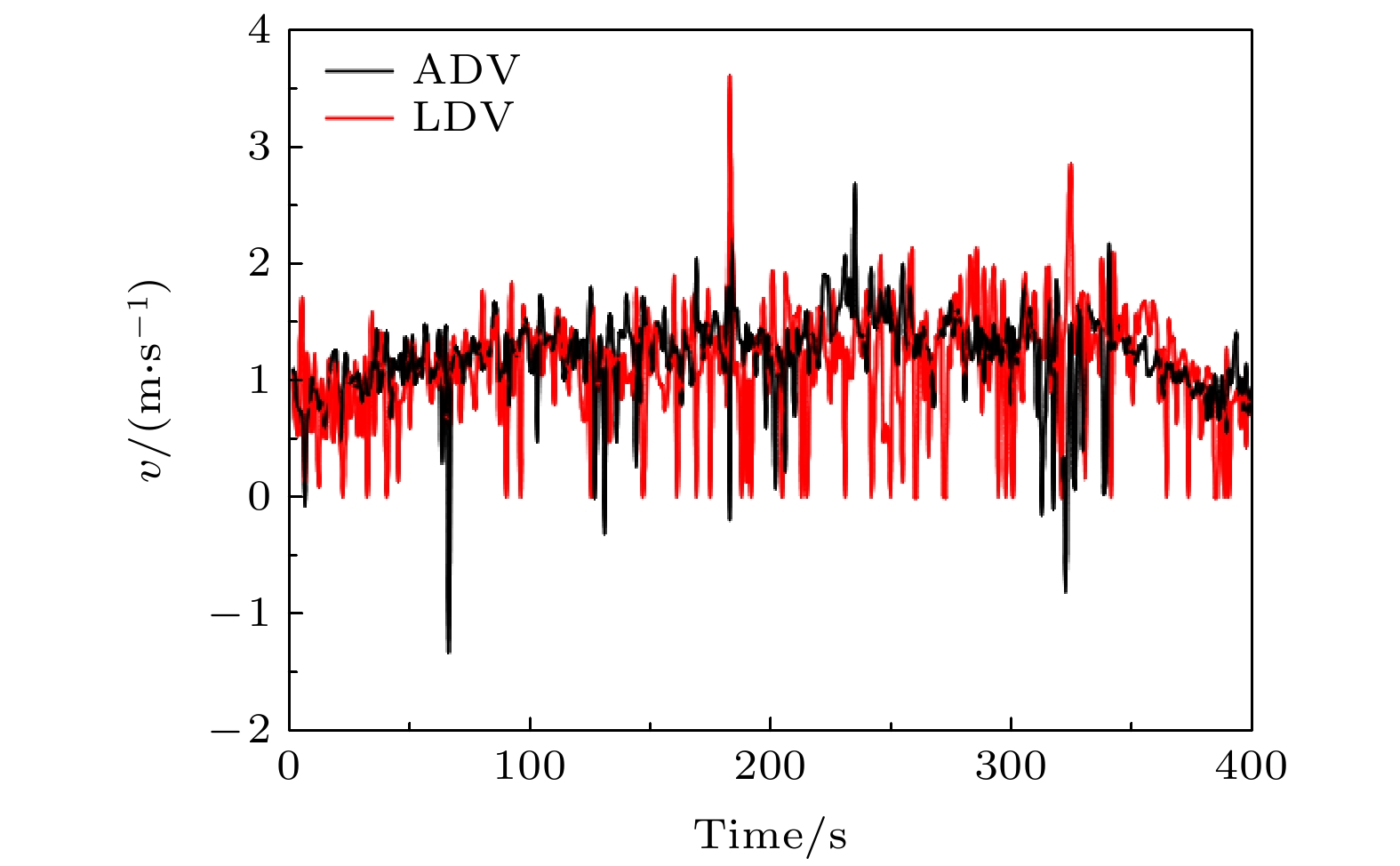 图 7 浅海试验中, LDV与ADV所测拖拽速度对比图
图 7 浅海试验中, LDV与ADV所测拖拽速度对比图Figure7. Comparison of towing speed measured by LDV and ADV in shallow sea test.
利用该试验样机在青岛深海基地进行了耐压试验, 在中国水利水电科学研究院进行了速度对比试验, 在主要流速段的测量误差均小于5%. 在海南陵水进行了浅海试验, 吊车将系统下放到水下50 m处, 测试了系统的下降速度, 信号获取良好. 将激光多普勒深海热液流速测量系统和超声波多普勒流速计共同悬挂在船尾, 使其位于水下2 m处, 测试随船的拖拽速度, 试验结果表明两者测试的拖拽速度相对误差为8.4%. 试验结果证明了激光多普勒流速测量系统进行深海原位热液流速测量的可行性.
