1.Guangdong Provincial Key Laboratory of Nanophotonic Functional Materials and Devices, School of Information and Optoelectronic Science and Engineering, South China Normal University, Guangzhou 510006, China 2.Guangdong Provincial Key Laboratory of Quantum Engineering and Quantum Materials, South China Normal University, Guangzhou 510006, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 61941501, 61775062, 62075129)
Received Date:25 April 2021
Accepted Date:04 August 2021
Available Online:30 August 2021
Published Online:20 December 2021
Abstract:An appropriate weak value can be used to amplify weak physical parameters and improve the precision of parameter estimation in the process of quantum weak measurement. The increase of the precision of such a parameter estimation may originate from the entanglement in the system. This paper uses Fisher information to study the influence of the entanglement in the system and the entanglement between the system and the pointer on the estimation precision of the coupling parameters between the system and the pointer in the process of weak measurement. The entanglement of the entangled pure state of the GHZ-like state and the entangled mixed state affected by the depolarization noise and the influence of the entanglement between the system and the pointer on the parameter estimation are analyzed. The results show that the Fisher information quantity increases with the increase of the initial state entanglement degree of the system when the initial state of the system is an entangled pure state or an entangled mixed state affected by depolarization noise, and both the Fisher information quantity and the post-selection probability reach their maximum values when the initial and final state of the system are both the maximum entangled states; but the weaker the entanglement between the system and the pointer, the more the Fisher information obtained in the measurement will be and the higher the accuracy of parameter estimation. These research results show that the entanglement in the system will improve the precision of parameter estimation, while the entanglement between the system and the pointer will reduce the precision of parameter estimation. Keywords:weak measurement/ weak value/ entanglement/ Fisher information
2.弱值放大的理论框架首先简洁地介绍弱值放大基本原理. 如图1所示, 初始态被制备成$ \left|S_{{\rm{i}}}\right\rangle \otimes|T\rangle $, $ \left|S_{{\rm{i}}}\right\rangle $是系统初态, $|T\rangle = \displaystyle\int{T}\left( p \right)\left| p \right\rangle {\rm{d}}p$是探针初态, 在动量空间中探针初始的动量分布可以写成$ P(p) = {{\left| {{T}}(p) \right|}^{2}} $的形式. 探针初态中的$T(p) = {{(\sqrt{2\pi }\delta )}^{-\tfrac{1}{2}}}\exp \left( -\dfrac{{{p}^{2}}}{4{{\delta }^{2}}} \right)$, 其中p和δ分别是探针的动量及动量的方差. 初始态制备之后系统和探针会通过弱相互作用耦合起来. 总的哈密顿量为$ \hat{{\boldsymbol{H}}} = \hat{{\boldsymbol{H}}}_{0}+\hat{{\boldsymbol{H}}}_{\mathrm{int}} $, 其中$ \hat{{\boldsymbol{H}}}_{0} $是系统和探针的自由哈密顿量, $ \hat{{\boldsymbol{H}}}_{\mathrm{int}} = g(t) \hat{{\boldsymbol{A}}} \otimes \hat{{\boldsymbol{p}}} $ ($\hbar = 1$)是系统探针的相互作用哈密顿量. 在相互作用绘景中演化算符可写成$ {\hat{{\boldsymbol{U}}}} = \exp (-{\rm{i}} g \hat{{\boldsymbol{A}}} \otimes \hat{{\boldsymbol{p}}}) $($g = \displaystyle\int{g(t){\rm{d}}t}$), 这里$\hat{{\boldsymbol{A}}} = \displaystyle\sum\nolimits_{i = 1}^{n}{{{{\hat{{\boldsymbol{\sigma}} }}}^{i}}_{z}}$, 其中$\hat{{\boldsymbol{\sigma}} }_{z}^{i} = |0\rangle \langle 0 |- $$ |1\rangle \langle 1 |$是第i个系统比特观察量算符. 因此系统和探针弱耦合之后的联合态可以写成: 图 1n量子比特系统弱测量的原理图. 系统初始态为$\left|S_{{\rm{i}}}\right\rangle$, 探针初始态为$|T\rangle$. 系统和探针之间的演化算符为$\hat {\boldsymbol {U}} $. 演化后对系统做$\left| {{S}_{{\rm{f}}}} \right\rangle $的后选择. 探针末态为$\left|T_{{\rm{f}}}\right\rangle$ Figure1. Schematic diagram of the weak measurement of the n qubit system. The initial state of the system is $\left|S_{{\rm{i}}}\right\rangle$, and the initial state of the pointer is $|T\rangle$. The evolution operator is $ \hat {\boldsymbol {U}} $ between the system and the pointer. After the evolution, the system is selected to $\left| {{S}_{{\rm{f}}}} \right\rangle $. The final state of the pointer is $\left|T_{{\rm{f}}}\right\rangle$
其中下标“s”表示系统, 上标“p”表示纯态. 这里需要强调的是系统末态也具有相同的纠缠度. 接下来分析系统初态的纠缠度随参数θ的变化, 如图(3)所示. 图 3 类GHZ态的纠缠纯态的纠缠度$E_{{\rm{s}}}^{({\rm{p}})}$随参数θ的变化曲线, 绘制了$\theta =\{0, \pi /2\}$的范围 Figure3. Entanglement $E_{{\rm{s}}}^{({\rm{p}})}$ of the entangled pure states of GHZ-like states as a function of the parameter $\theta$. we have plotted the range of $\theta =\{0, \pi /2\}$.
从图3可以看出, 系统初态的纠缠度随θ角先增大后减小, 当参数$ \theta = \pi /4 $时系统初态的纠缠度最大, 此时系统的初态$\left| S_{\rm{i}}^{{\rm{m}}} \right\rangle = ({{\left| 0 \right\rangle }^{\otimes {n}}}{+}{{\left| 1 \right\rangle }^{\otimes {n}}})/{\sqrt{2}}$为最大纠缠态. 为了进一步分析后选择概率和耦合参数g的Fisher信息与系统初态纠缠度的关系, 绘制了$ n = 2 $时后选择概率和Fisher信息随纠缠度$ E_{{\rm{s}}}^{({\rm{p}})} $的变化曲线. 从图4可看出, 后选择概率和参数g的Fisher信息随系统初末态纠缠度的增大而增大. 当系统初态纠缠度为零时, 系统的初态为直积态$\left| {{S}_{0}} \right\rangle = {{\left| 0 \right\rangle }^{\otimes {n}}}$或$\left| {{S}_{1}} \right\rangle = {{\left| 1 \right\rangle }^{\otimes {n}}}$, 此时得不到参数g的Fisher信息. 然而当系统的纠缠度最大时, 系统初态$\left| S_{\rm{i}}^{{\rm{m}}} \right\rangle = $$ ({{\left| 0 \right\rangle }^{\otimes {n}}}{+}{{\left| 1 \right\rangle }^{\otimes {n}}})/{\sqrt{2}}$和系统的末态$\left| S_{\rm{f}}^{{\rm{m}}} \right\rangle = ({{\left| 0 \right\rangle }^{\otimes {n}}}- $$ {{{\rm{e}}}^{-{\rm{i}}\varepsilon }}{{\left| 1 \right\rangle }^{\otimes {n}}})/{\sqrt{2}}$均为最大纠缠态, 此时的Fisher信息和后选择概率均达到最大, 即在弱测量中, 增大系统内的纠缠度对参数g的评估精度有很好的增益. 图 4 蓝色曲线表示后选择概率随纠缠度$E_{{\rm{s}}}^{({\rm{p}})}$的变化曲线, 橙色曲线表示耦合参数g的Fisher信息随纠缠度$E_{{\rm{s}}}^{({\rm{p}})}$的变化曲线. 参数选取: $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = 0.01$, $g= $$ 0.88\;\text{μ} {\rm{m}}$, $n=2$. Figure4. Blue curve represents the post-selection probability as a function of entanglement $E_{{\rm{s}}}^{({\rm{p}})}$, and the orange curve represents the Fisher information of the coupling parameter g as a function of entanglement $E_{{\rm{s}}}^{({\rm{p}})}$. Parameter selection: $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = 0.01$, $g=0.88\;\text{μ} {\rm{m}}$, $n=2$.
其中下标“s”表示系统, 上标“m”表示混态. 图5给出了$ n = 2 $时系统初态的纠缠度随纯度参数Q的变化曲线. 图 5$n=2$时, 系统初态的纠缠度$E_{{\rm{s}}}^{({\rm{m}})}$随纯度参数Q的变化曲线 Figure5. Entanglement $E_{{\rm{s}}}^{({\rm{m}})}$ of the initial state of the system as a function of the purity parameter Q. Parameter selection: $n=2$.
图5表明纠缠度随着纯度参数的增大而减小, 当$Q\leqslant {2}/{3}$时, 系统初态是纠缠态, 当$Q > {2}/ {3}$, 系统初态已不再纠缠. 接下来分析系统初态的纠缠度对参数评估精度的影响, 并画了$ n = 2, \;4, \;6 $时后选择概率以及Fisher信息随系统初态纠缠度的变化曲线. 从图6可以看出, 当系统初态为受退极化噪声影响的纠缠混态时, 参数的Fisher信息随初态纠缠度的增大而增大. 当初态的纠缠度达到1时, 参数g的Fisher信息能够达到最大. 而且可以看出系统中纠缠的比特数越大, 参数g的Fisher信息越大. 后选择概率在$ n = 2 $和$ n = 4 $时随着纠缠度$ E_{{\rm{s}}}^{({\rm{m}})} $的增大而减小, 而在$ n = 6 $时反而随着纠缠度的增大而增大, 这是由于当比特数小时, 后选择的概率主要是由极化噪声导致的, 而纠缠度与纯度参数Q是呈负相关的, 因而后选择概率随着纠缠度的增大而减小. 随着比特数的增大, 系统比特对后选择概率的影响要比极化噪声的大, 因而后选择概率随着纠缠度的增大而增大. 图 6 蓝色曲线表示后选择概率随纠缠度$E_{{\rm{s}}}^{({\rm{m}})}$的变化曲线, 橙色曲线表示参数g的Fisher信息随纠缠度$E_{{\rm{s}}}^{({\rm{m}})}$的变化曲线. 参数选取: $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = 0.01$, $g=0.88\;\rm{μ} {\rm{m}}$ Figure6. Blue curve represents the post-selection probability as a function of entanglement $E_{{\rm{s}}}^{({\rm{m}})}$, and the orange curve represents the Fisher information of the parameter g as a function of entanglement $E_{{\rm{s}}}^{({\rm{m}})}$. Parameter selection: $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = 0.01$, $g=0.88\;\rm {μ} {\rm{m}}$.
表1两种方案后选择概率和后选择后指针分布的比较 Table1.Comparison of the post-selection probability and the post-selection pointer distribution of the two schemes
当$n\geqslant 2$时, 纠缠系统初态方案的后选择概率要大于直积系统初态方案. 但后选择后指针具有相同的分布形式. 与此同时我们又比较了两种方案在$ n = 2 $时的Fisher信息. 从图7可以看出, 当系统初态为最大纠缠态时参数g的Fisher信息要大于系统初态为直积态时参数g的Fisher信息. 综上可以得出结论, 在参数评估精度及后选择概率方面纠缠系统初态的方案要优于直积系统初态方案. 图 7 浅蓝色曲线表示初态为纠缠态时参数g的Fisher信息随耦合参数g的变化曲线, 深蓝色曲线表示初态为直积态时参数g的Fisher信息随耦合参数g的变化曲线. 参数选取: $n=2$, $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = 0.01$ Figure7. Light blue curve represents Fisher information of the parameter g as a function of the coupling parameter g when the initial state is entangled, and dark blue curve represents Fisher information of the parameter g as a function of the coupling parameter g when the initial state is product state. Parameter selection: $n=2$, $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}$, $\varepsilon = $$ 0.01$.
这里仍然使用对数负纠缠来度量系统和探针之间的纠缠度, 并画了系统探针间的纠缠度$ {{E}_{{\rm{st}}}} $随参数g的变化曲线以及参数g的Fisher信息随$ {{E}_{{\rm{st}}}} $的变化曲线, 如图8所示. 图 8 (a) 系统探针之间的纠缠度${{E}_{{\rm{st}}}}$随耦合参数g的变化曲线; (b)参数g的Fisher信息随系统探针之间的纠缠度${{E}_{{\rm{st}}}}$的变化曲线. 参数选取为$\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}, \varepsilon = 0.01$ Figure8. (a) Entanglement ${{E}_{{\rm{st}}}}$ between system and pointers as a function of the coupling parameter g; (b) the Fisher information of the parameter g as a function of the entanglement ${{E}_{{\rm{st}}}}$ between system and pointers. Parameter selection: $\delta = 4\times {{10}^{4}}\;{{{\rm{m}}}^{-1}}, \varepsilon = 0.01$.














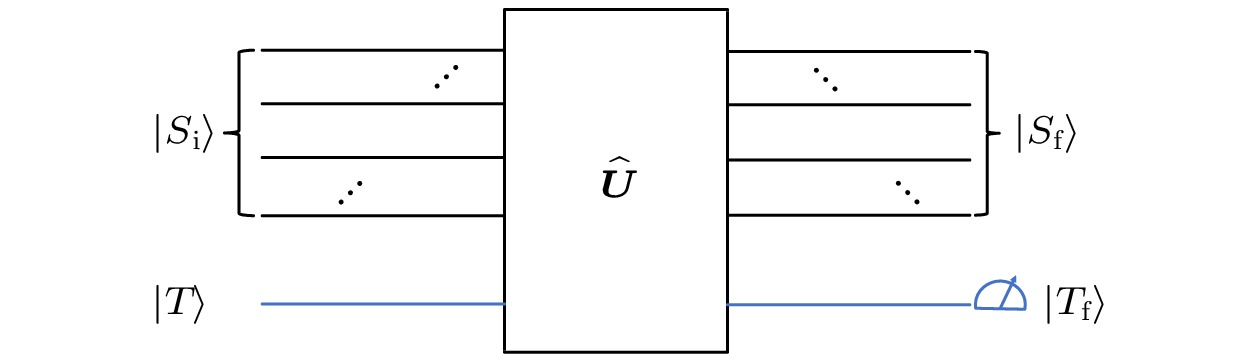 图 1 n量子比特系统弱测量的原理图. 系统初始态为
图 1 n量子比特系统弱测量的原理图. 系统初始态为









































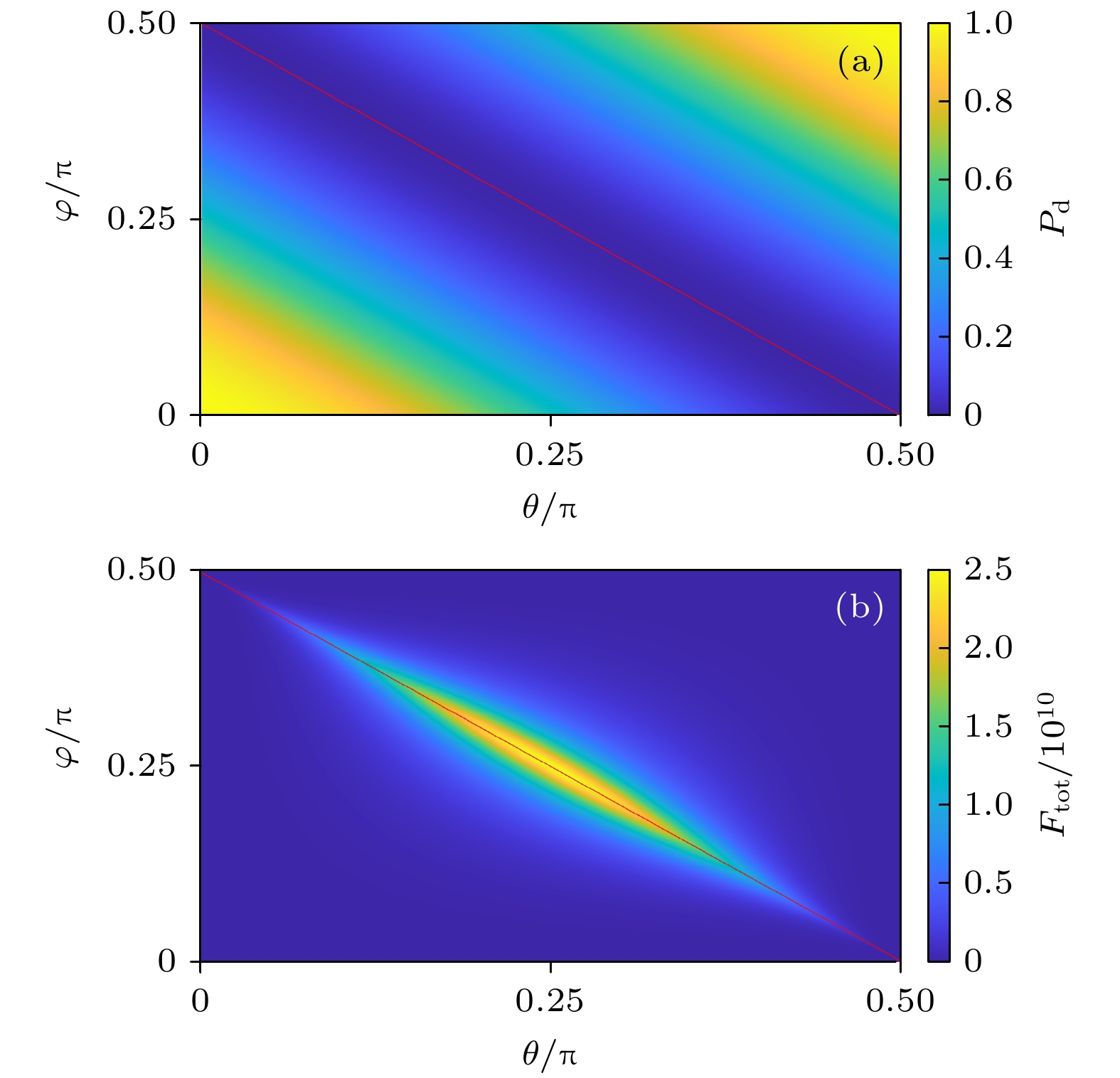 图 2 (a)后选择概率
图 2 (a)后选择概率



























 图 3 类GHZ态的纠缠纯态的纠缠度
图 3 类GHZ态的纠缠纯态的纠缠度














 图 4 蓝色曲线表示后选择概率随纠缠度
图 4 蓝色曲线表示后选择概率随纠缠度



















 图 5
图 5 










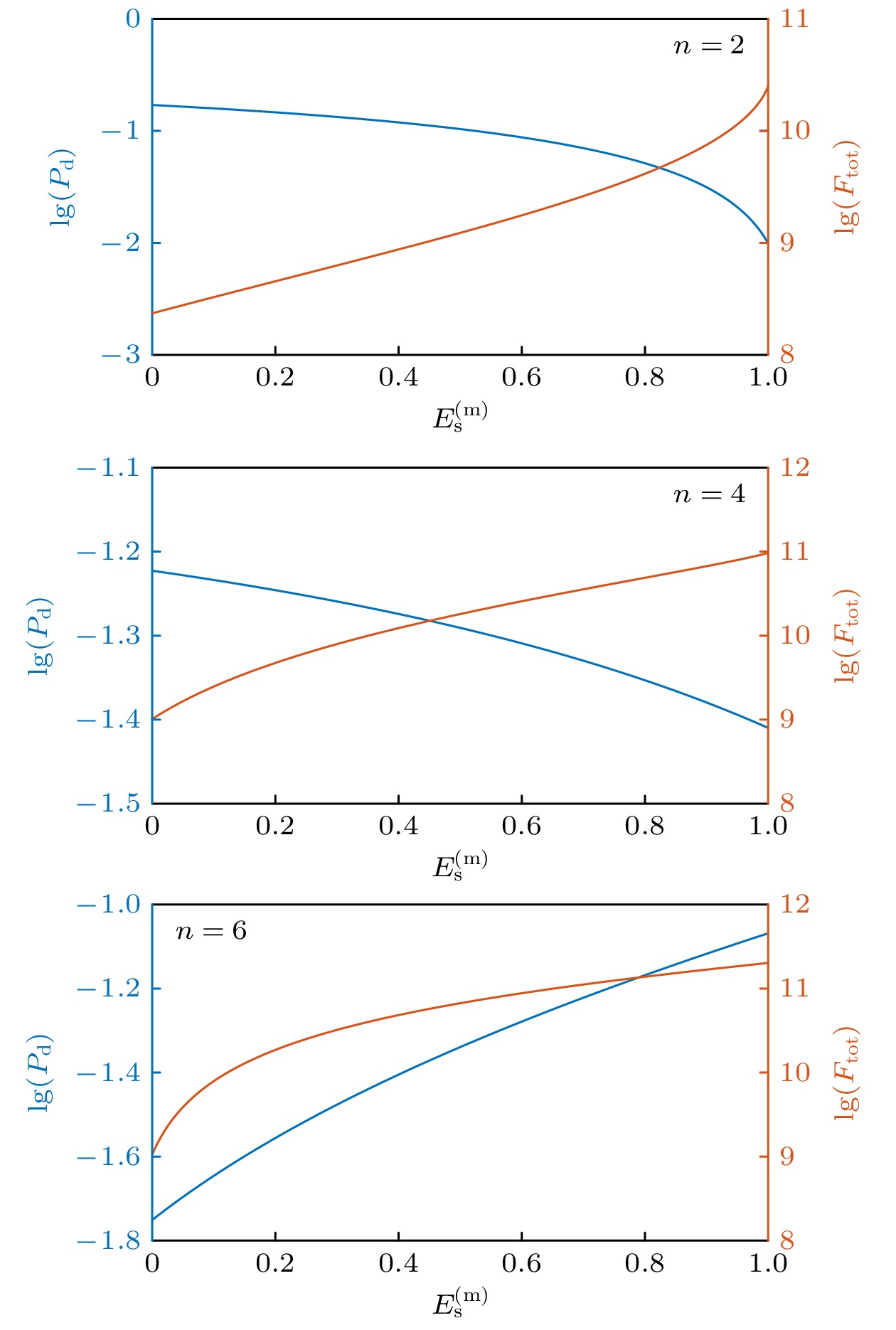 图 6 蓝色曲线表示后选择概率随纠缠度
图 6 蓝色曲线表示后选择概率随纠缠度

















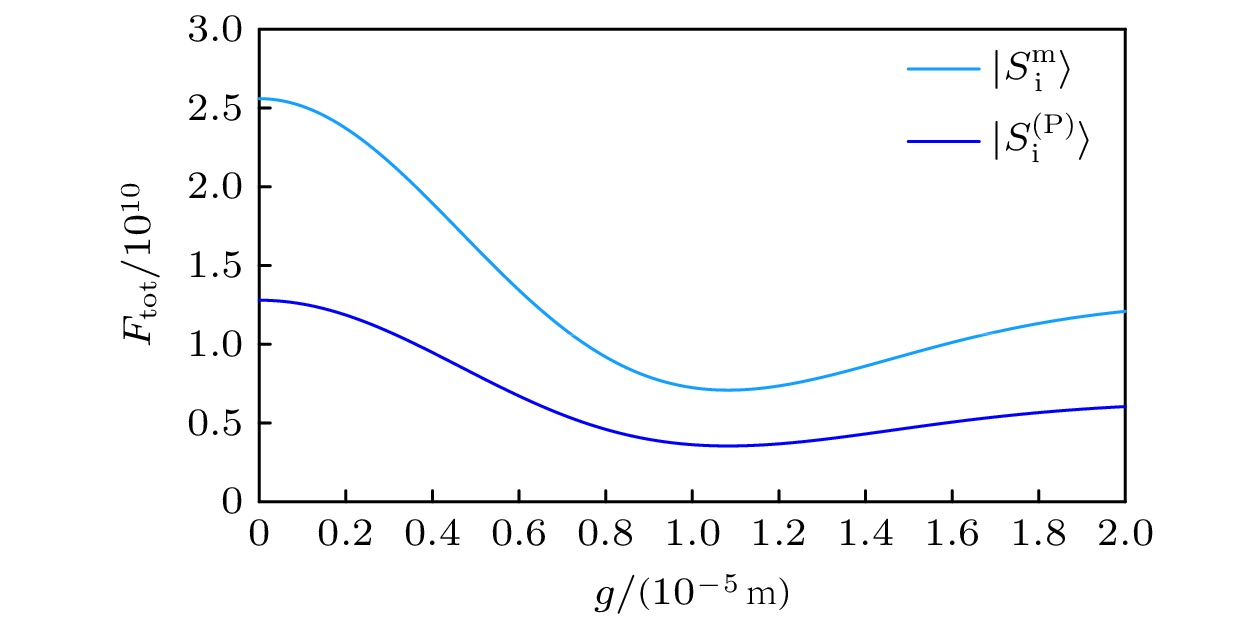 图 7 浅蓝色曲线表示初态为纠缠态时参数g的Fisher信息随耦合参数g的变化曲线, 深蓝色曲线表示初态为直积态时参数g的Fisher信息随耦合参数g的变化曲线. 参数选取:
图 7 浅蓝色曲线表示初态为纠缠态时参数g的Fisher信息随耦合参数g的变化曲线, 深蓝色曲线表示初态为直积态时参数g的Fisher信息随耦合参数g的变化曲线. 参数选取: 

















 图 8 (a) 系统探针之间的纠缠度
图 8 (a) 系统探针之间的纠缠度







