摘要: 提出了一种基于动态光学频率梳啁啾脉冲干涉的绝对距离快速测量方法. 借助于重复频率的线性扫描, 可获取啁啾光谱干涉信号中最宽条纹的动态频率偏移, 从而完成被测距离的高精度测量. 动态重复频率能够延伸光谱仪探测极限, 相应地减小测量盲区, 并且基于合成波长也使得测量非模糊范围得到极大的拓展. 本文测距系统无需重复频率的锁定, 能够摆脱对锁相环等复杂应用模式的依赖, 在简化系统的同时借助铷钟提供精准时钟参考, 从而进一步提高测量精度. 此外, 电荷耦合器件成像帧速以及重复频率扫描速度的提升可实现干涉信号的快速采集, 弥补传统光谱干涉测量以及腔调谐方式在探测速度上的不足. 实验结果表明, 本文方法单点测距数据更新率为13.5 Hz, 相较于参考数值, 在20 m的测量范围内, 测量不确定度优于27 μm, 相对精度为1.35 × 10
–6 .
关键词: 绝对距离测量 /
动态光学频率梳 /
啁啾脉冲干涉 English Abstract Rapid absolute distance measurement by dynamic chirped pulse interferometry Xu Xin-Yang 1 ,Zhao Hai-Han 1 ,Qian Zhi-Wen 1 ,Liu Chao 1 ,Zhai Jing-Sheng 1 ,Wu Han-Zhong 2 1.School of Marine Science and Technology, Tianjin University, Tianjin 300072, China Fund Project: Project supported by the National Basic Research Program of China (Grant No. 2016YFC1401203), the National Natural Science Foundation of China (Grant Nos. 61505140, 62075162), and the Natural Science Foundation of Tianjin, China (Grant No. 18JCYBJC17100).Received Date: 17 December 2020Accepted Date: 29 June 2021Available Online: 16 August 2021Published Online: 20 November 2021Abstract: Frequency combs have given rise to revolutionary progress in a variety of applications. The absolute distance measurement by using frequency comb has been developing rapidly in recent years. In this paper, a method of rapid ranging via the dynamic chirped pulse interferometry is proposed. With the sweeping of comb spacing, the dynamic frequency offset of the sparsest stripes can be obtained in the chirped pulse interferometry, which leads to the cues about the measuring distance. The introduction of dynamic comb spacing can effectively reduce the dead zone of the optical spectrum analyzer. Based on the theory of synthetic wavelength, the multiple repetition frequency can also realize a great non-ambiguity range. In the measuring system, there is no need to lock the repetition rate any more, thereby removing the dependency of bulky phase-locking circuits, and simplifying the system. Besides, the rubidium clock brings the accurate clock reference in the system. Hence, the repetition rate and camera can perform strict synchronization. Considering the improvements of imaging frame rate and the scanning speed of repetition rates, the changed spectral interferograms can be obtained rapidly, and thus compensating for the speed deficiency of dispersive interferometry and cavity tuning. The experimental results show that elapsed time is 74.1 ms for the single time, corresponding to a data updating rate of 13.5 Hz. In a range of 20 m, the measurement uncertainty is well within 27 μm, i.e. the relative precision of 1.35 × 10–6 .Keywords: absolute distance measurement /dynamic optical frequency comb /chirped pulse interferometry 全文HTML --> --> --> 1.引 言 光学频率梳自诞生之初, 就在众多应用领域的发展中展现出划时代意义, 并体现重要的研究价值, 也因此受到国内外专家****的广泛关注[1 -3 ] . 其中光频梳在频率计量[4 ,5 ] 、光谱分析[6 ,7 ] 、太空梳[8 ,9 ] 和绝对距离测量[10 ,11 ] 等领域中, 依据其自身特性, 打破了传统激光应用的技术壁垒, 为各领域的方法革新提供了特有的解决方案. 光学频率梳在时域上表现为锁模脉冲序列, 在频域中具有频率间隔严格相等的频率纵模, 并保持极强的相干性. 光学频率梳其内在从射频到光频的频率纵模可溯源至相同的时钟基准, 这也意味着光频梳自身的稳定性和精度能够借助外部参考得以提升.[12 ] . 基于长延迟光纤的谐振腔扫描光学采样(OSCAT)技术在保证测距精度的同时, 可实现探测范围内的任意距离测量, 从而消除测量盲区[13 ,14 ] . 此外, 光学频率梳的多波长相位探测相较于传统激光相位测量, 在保证亚波长精度的基础上极大地拓展了非模糊范围[15 ] , 另外基于光频梳模间拍频, 通过引入高次谐波可显著提高绝对距离测量精度[16 ,17 ] . 对于依据光频及啁啾信息的色散干涉, 其在光纤色散测量和相干层析成像等领域的应用证明了该方法优秀的计量特性[18 -20 ] . 借助光学频率梳的频率溯源性, 色散干涉可提取解卷裹的光谱相位斜率[21 ] , 或探测啁啾脉冲的频率偏移完成绝对距离测量[22 ] . 系统中无需运动机械结构即可获取包含距离信息的光谱干涉条纹, 这也使得色散干涉具备实现快速测量的理论可能. 基于异步光学采样的双光梳技术, 通过两台具有微小重频差异的光学频率梳, 获取双光梳干涉条纹以实现绝对距离测量. 双光梳测距系统在保证干涉测量精度的同时, 具备极高的数据更新率, 并且通过重复频率的调整也可得到极大的非模糊范围[23 -25 ] .2.动态啁啾脉冲干涉绝对距离测量原理 基于动态啁啾脉冲干涉的实验原理如图1 所示. 动态光学频率梳的实现基于环形腔长的线性扫描, 环形腔中的精密机械位移台通过高定位精度完成腔长的周期性调制. 此外, 整个光源系统处于隔温隔震的密闭环境, 保证了整体系统的稳定性. 测距干涉仪由图1 中的分束镜(BS)分为两部分, 其中参考路光程固定并且通过一对光栅实现脉冲啁啾, 另外一路行进经过待测距离称为测量路. 两路光束通过回射系统反射, 回光在分束镜处合束, 随后借助光谱探测系统进行高速采集.图 1 动态啁啾脉冲干涉实验原理图Figure1. Schematic diagram of dynamic chirped pulse interferometry.f rep )的快速扫描, 无论是传统的空间色散光谱仪还是傅里叶变换光谱仪均受限于其内部存在的机械组件, 因此无法在高分辨率模式下实现动态啁啾干涉信号的快速获取. 在本文方法中, 干涉信号通过光栅色散, 借助电荷耦合器件(CCD)实现高帧速采集, 弥补了传统光谱仪探测速度的不足[26 ,27 ] .α 和β 为功率因子, $ a_1=2?\ln(2/t_c^2) $ , t c 为啁啾后的脉冲宽度, b 为啁啾系数, $ b\approx \Delta \omega/(2t_c) $ , Δω 为脉冲的带宽, $ a_2=2\ln(2/t_0^2) $ , t 0 为未产生啁啾的脉冲宽度, 上述各项分别为表征系统光栅、光源自身性能的参数. 此外, ω c 为中心角频率, τ 为测量脉冲与参考脉冲间的飞行时间延迟, 其指代系统所包含的被测距离信息. 则脉冲光谱干涉结果可表述为$\Im $ 代表傅里叶变换; I 0 为两脉冲光谱的叠加, 可看作直流项; 而另一项为交流项, 其中I 1 为调制幅值. 则啁啾脉冲的光谱干涉信号相位? (ω )可表示为4 )式表明, 引入脉冲啁啾的相位函数与角频率为二次函数关系, 即光谱干涉条纹不再随着角频率的变化形成稳定振荡, 而是伴随着一个变化的调制频率. 当调制频率达到极小值时, 干涉条纹振荡最为缓慢且同时出现最宽振荡条纹. 则对(4 )式求导可得τ 为被测距离在光速定义下的时域映射, 本文中定义c 为真空中光的传播速度, n g 为脉冲在相应介质中的群折射率, l d 为动态啁啾脉冲干涉条纹所对应的被测距离. 因此基于对应关系τ = 2n g l d /c , 调制频率极小处对应的频率可表示为b (1024 )远远大于a 1 (1019 ). 基于啁啾脉冲干涉特性, l d 可理解为距离测量的小数部分. 实际距离L 为l d 与N 倍脉冲间距l pp 的累加, 即$ L = (N\cdot l_{\rm pp})/2+l_{\rm d} $ , 其中l pp 可表示为$ c/(n_{\rm g}\cdot f_{\rm rep}) $ . 则实际被测距离L 可表示为f drep 为动态光频梳中某一时刻的重复频率. 当系统中引入动态光学频率梳时, 重复频率f drep 数值实现周期线性扫描. 由(7 )式可知, 在被测距离L 一定的前提下, 距离量l d 会随之产生动态变化, 并且光谱干涉条纹中最宽条纹的位置会发生往复偏移. 基于(6 )式表征的啁啾频移关系, 距离量l d 可计算为ω dyn 为动态光频梳在某一重频时最宽条纹对应的频率, 并对应着一个频率偏移量ω shift . 因此, 通过最宽条纹位置的变化即可解算被测距离L , 同时基于动态重复频率的合成波长能够拓展测量非模糊范围. 则最终实际被测距离L 可表示为L 时整数倍l pp 和l d 的加减对应关系, 使得绝对距离测量具有唯一性.3.实验及测量结果 本文依据所提出方法的测量原理搭建相应的实验系统, 并在参考路中引入脉冲啁啾. 为验证原理, 并能够对性能参数做出准确分析, 本文进行了大尺寸的绝对距离测量实验. 测量过程中, 环境参数保持相对稳定, 其中温度为21.20 ℃, 气压为997.63 hpa, 相对湿度为45.1%. 依据Ciddor公式[28 ] , 在此环境条件下的群折射率为1.00026657.l pp 调谐范围为2.8846—2.9014 m, 该范围内扫描周期为1.16 s. 此外, 光源中心波长为1030 nm, 光谱宽度约为15 nm, 其光谱如图2 所示.图 2 脉冲激光光谱图Figure2. Pulse laser spectrogram.3.1.动态啁啾脉冲测距系统标定 3.1.动态啁啾脉冲测距系统标定 由于测量系统中, 频率偏移量、啁啾系数等参数难以做到准确获取, 并且实验条件的不确定性也将提高各项参数的获取难度. 在本文系统中, 基于动态重复频率就可使外部标定系统在无运动组件的情况下完成距离参数标定. 在标定系统中, 当L 约为l pp /2扫描范围内时, 随着重复频率的线性扫描, 最宽条纹位置会发生往复偏移. 基于重频扫描CCD标定原理, 搭建标定系统如图3 所示.图 3 CCD标定系统示意图Figure3. Sketch of CCD calibration system.f = 200 mm)完成线激光准直, 借助CCD相机(PCO.pixelfly usb, 13.5 fps, 1392 × 1040 pixels)采集啁啾脉冲干涉条纹. 并且, 基于采集图像的灰度信息, 通过最宽条纹的插值拟合实现像素的光频校正, 从而获取重频变化对应的像素偏移量. 标定过程分别依次选取两个标定重频为103.631和103.710 MHz时的啁啾脉冲干涉条纹, 实验中使用光阑遮挡降低图像背景亮度, 从而提高条纹对比度. 相机标定结果如图4 所示.图 4 相机标定实验结果图 (a), (d) 两标定重复频率对应光谱图; (b), (e) 两标定重复频率对应相机采集图像; (c), (f) 图像灰度处理结果Figure4. Experimental results of CCD calibration: (a), (d) Spectrograms for two calibrated repetition rates; (b), (e) captured camera images for two calibrated repetition rates; (c), (f) grayscale images processing results.P left 和P right , 从而确定两峰值处对应的中值位置, 完成最宽条纹处P widest 位置的精确测量. 该解算模式可表示为f rep 为两个标定重频相应的重频差. 由于系统中啁啾量保持不变, 位移量与最宽条纹移动量保持线性关系, 因此对于单位像素的标定距离可以表示为–6 m/pixel. 则某一重频下绝对距离L 的计算可重写为P shift 为该重复频率条件下, 对应实际被测距离L 的最宽条纹像素偏移量. 上述标定方法简化了光谱干涉信号相机标定的方式, 在有效地提高标定速度的同时, 摆脱了传统方式中对位移台定位精度的依赖.3.2.实验结果 -->3.2.实验结果 如图5 所示, 基于Michelson干涉仪结构, 本文将动态啁啾脉冲干涉应用于大尺寸绝对距离测量当中, 并以增量式干涉仪(Agilent 5519B)的测距结果作为参考数值, 其相应的稳定度在20 m处, 10 min的测量时间内优于0.3 μm. 实验中仔细调试了相机及光栅位置, 以确保获取图像的完整和清晰. 此外, 脉冲动态重频的精准获取, 以及对应时刻相机信号的同步采集是决定探测精度的关键步骤. 因此在信号探测过程中, 铷钟(Microsemi 8040)被用作频率计数器(Keysight 53230A)的外部时钟参考, 并且借助信号源(Tektronix AFG3102C)提供极为精准的同步触发信号, 为频率计数器门控和相机的同步采集提供统一的时间基准.图 5 实验装置图Figure5. Diagram of experimental setups.l pp 为间距均匀分布在光学长导轨上. 其中当动态重复频率为103.374 MHz, 在2.9 和17.4 m处的光谱干涉条纹如图6 所示. 随着重复频率的动态扫描, 可直接获得最宽条纹的左右偏移, 从而完成正负时延的确定, 得到唯一确定的被测距离. 由图6 可知, 长距离实验易受到环境振动及空气扰动等影响, 且光路的准直等高也会随着被测距离的增大而变化, 对干涉条纹的调制深度产生影响.图 6 啁啾脉冲干涉实验结果图 (a) 2.9 m处光谱图; (b) 2.9 m处相机采集条纹; (c) 17.4 m处光谱图; (d) 17.4 m处相机采集条纹Figure6. Experimental results of chirped pulse interferometry: (a) Spectrogram at 2.9 m; (b) captured camera fringes at 2.9 m; (c) spectrogram at 17.4 m; (d) captured camera fringes at 17.4 m.图7 所示. 实验数据表明, 在20 m范围内测量不确定度优于27 μm, 相对精度为1.35 × 10–6 . 相较于双光梳或模间拍频等测距技术, 本文方法摆脱了系统对锁相环的依赖, 但频率稳定性及光谱分辨率则影响着最终的测距精度. 然而, 本文方法机理上与波长信息相连接, 保证了方法的测量精度, 并且借助最宽条纹的中值解算模式, 可有效地抑制环境噪声对测距结果的影响. 此外, 该方法基于动态啁啾信息可实现非模糊范围的快速拓展.图 7 距离测量结果Figure7. Results of distance measurements.图8 所示. 为便于观察, 散点图为1/10的系统抽样结果, 数据标准差为8.4 μm, 采集数据更新率为13.5 Hz, 在1和100 s的平均时间内阿伦方差分别可达到2.3 μm及265 nm.图 8 长时间距离测量实验结果 (a) 数据散点图; (b) 测距结果阿伦方差Figure8. Long-term experimental results of the distance measurement: (a) Data scatter diagram; (b) Allan deviation of ranging results.3.3.测量不确定度分析 -->3.3.测量不确定度分析 为对本文方法测量不确定度做出评价, 研究系统各项参数对测距结果的精度影响, (13 )式可重写为n g 、动态重复频率f drep 、频率偏移量f shift 等影响因素. 首先, 对于群折射率的确定需考虑传感器固有不确定度、环境稳定性以及在测量范围内的环境不均匀性. 基于上述分析, 实验中通过环境传感器进行环境监测和参数采集, 借助Ciddor公式对空气折射率进行实时补偿, 其中温度、大气压以及相对湿度等环境参数波动分别为42.7 mK, 12.9 Pa, 和 3.1%, 对应的测量不确定度分别为4 × 10–8 , 3.4 × 10–8 和2.9 × 10–8 , 则合成不确定度为6 × 10–8 ·L . 第二项中, 动态重复频率的采集依靠频率计数器, 并且与CCD的采集触发信号严格锁定至同一时间基准上, 其中动态重频不确定度为5.38 Hz(标准差), 则第二项对应测量不确定度为9 × 10–7 m. 第三项与最宽条纹频率偏移量相关, 在本文系统中也可对应为像素偏移量的测量不确定度. 通常在实验中, 像素分辨率、像素尺寸、干涉条纹调制深度以及最宽条纹定位精度均会对测量不确定度造成一定的贡献. 基于相机标定结果, 光频与像素存在空间映射关系, 依据重复性测量可得频率偏移量不确定度为0.063 THz, 则该项测量不确定度为26.9 μm. 基于上述分析, 本文方法合成测量不确定度为[(27 μm)2 + (6 × 10–8 ·L )2 ]1/2 . 此外, 在啁啾系数一定的情况下, 系统光路经过调试和优化始终保持出色的调制深度, 并且所采用的最宽条纹定位提取算法也能实现频率偏移量的准确测量.4.结 论 本文提出一种快速绝对距离测量方法, 基于重复频率的线性扫描, 实现动态啁啾脉冲干涉. 本文方法突破了光学频率梳重复频率锁定的传统应用模式, 借助于重频的动态变化极大地延伸了测量非模糊范围, 并且能有效拓展光谱仪探测分辨极限. 在简化系统的同时, 光谱干涉信号也能够实现快速采集, 满足了几何量计量的工程实践需求. 基于实验结果, 数据更新率为13.5 Hz的长时间测量验证了本文方法的测量稳定性, 并且在20 m范围内, 测量不确定度优于27 μm, 相对精度为1.35 × 10–6 . 本文系统在参考臂引入脉冲啁啾, 而在今后的研究中也可通过大气或水体色散在测量臂实现脉冲啁啾, 从而将影响因素转变为测量信息, 以提高方法对实际环境的适用性. 并且, 本文工作可为大尺寸绝对距离测量、面型三维重构、以及水体等强色散介质中的目标探测提供相应的技术储备. 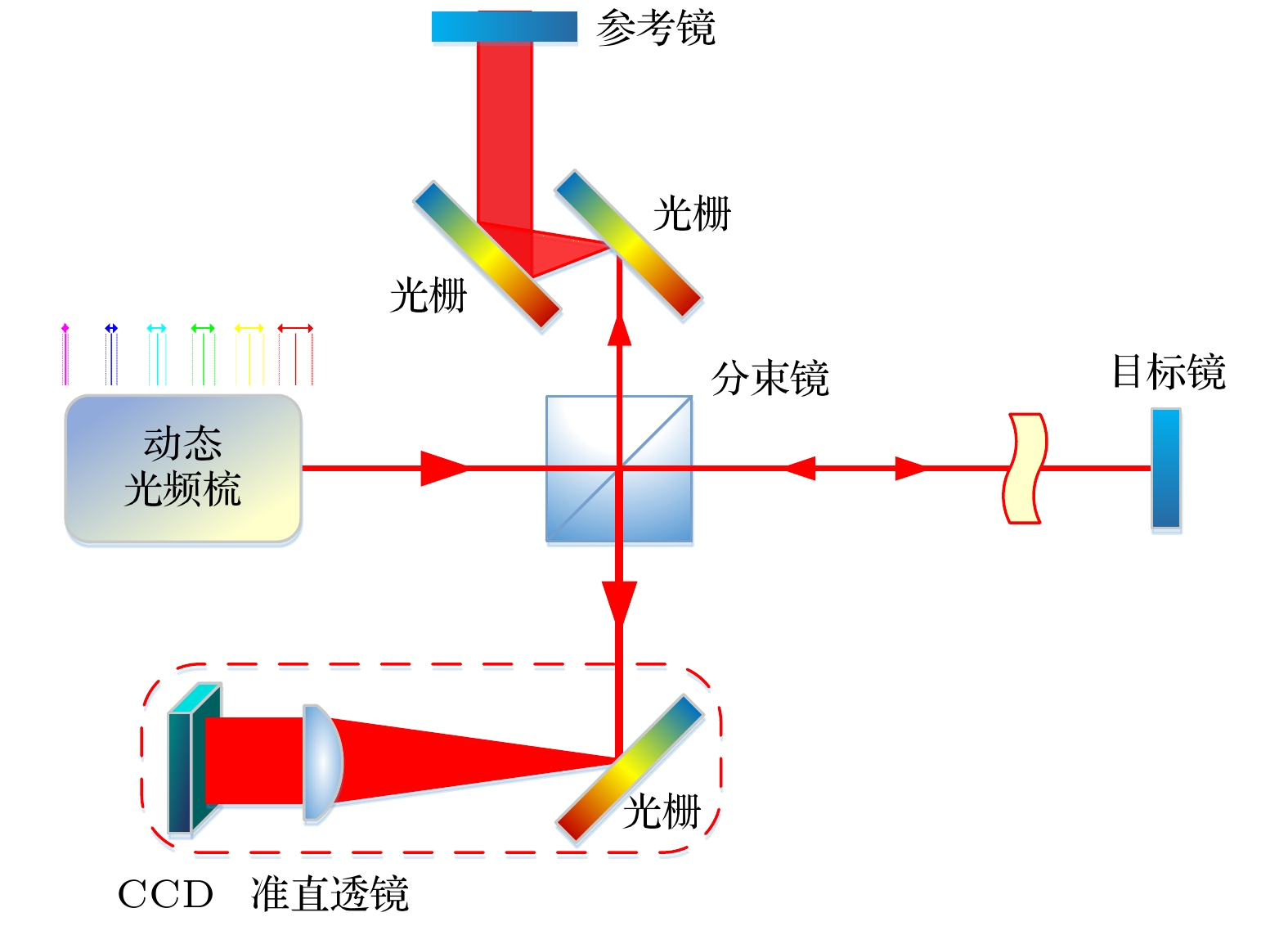 图 1 动态啁啾脉冲干涉实验原理图
图 1 动态啁啾脉冲干涉实验原理图





 图 2 脉冲激光光谱图
图 2 脉冲激光光谱图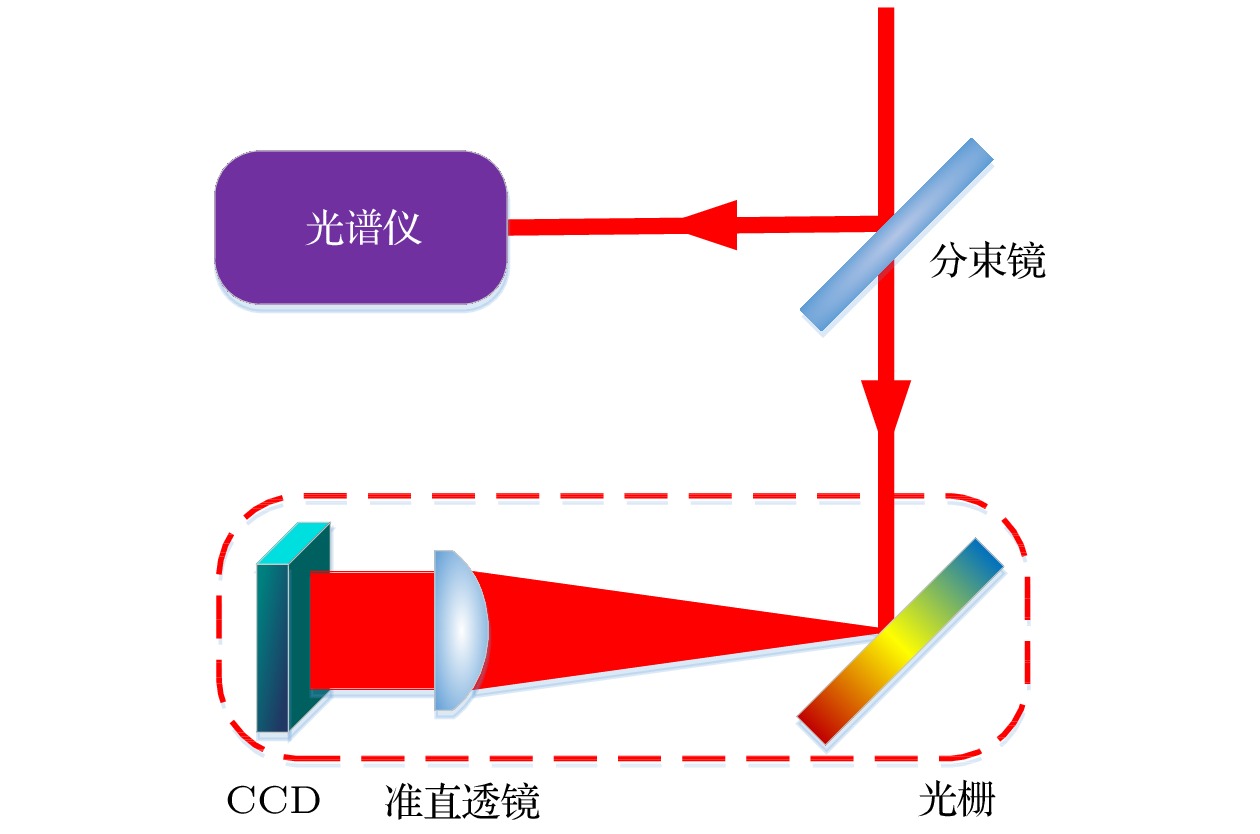 图 3 CCD标定系统示意图
图 3 CCD标定系统示意图 图 4 相机标定实验结果图 (a), (d) 两标定重复频率对应光谱图; (b), (e) 两标定重复频率对应相机采集图像; (c), (f) 图像灰度处理结果
图 4 相机标定实验结果图 (a), (d) 两标定重复频率对应光谱图; (b), (e) 两标定重复频率对应相机采集图像; (c), (f) 图像灰度处理结果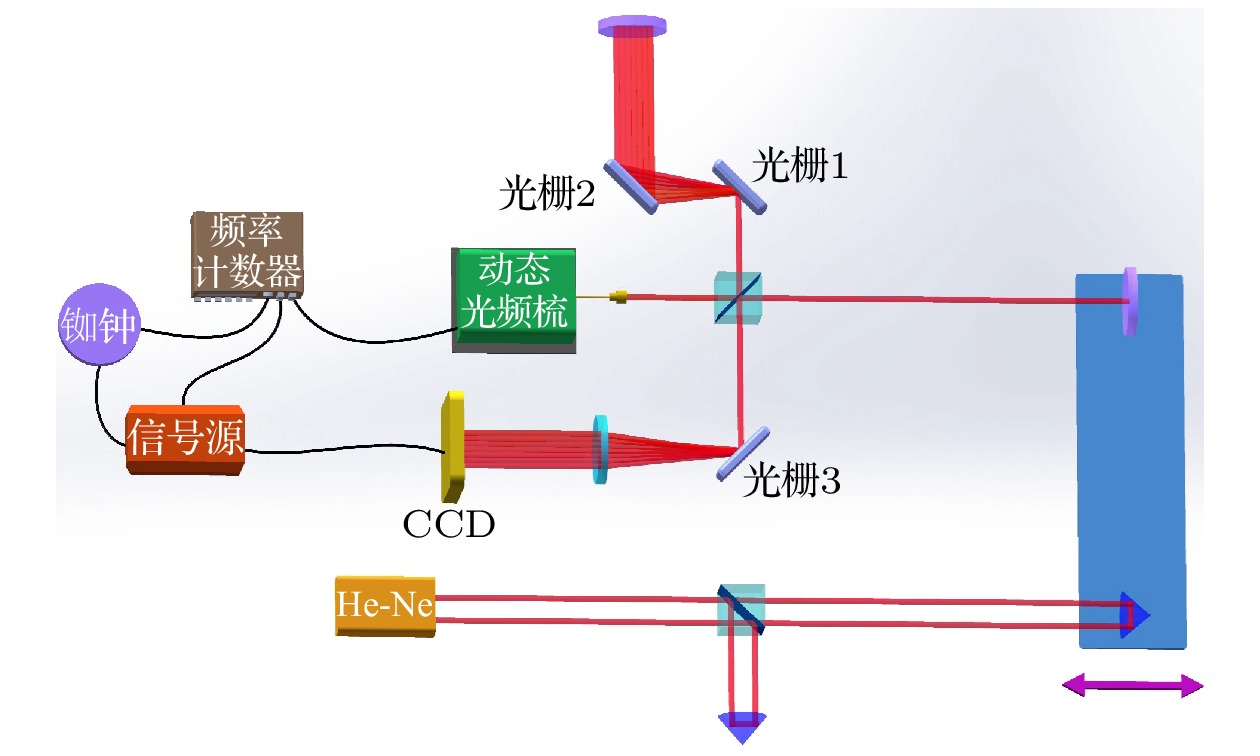 图 5 实验装置图
图 5 实验装置图 图 6 啁啾脉冲干涉实验结果图 (a) 2.9 m处光谱图; (b) 2.9 m处相机采集条纹; (c) 17.4 m处光谱图; (d) 17.4 m处相机采集条纹
图 6 啁啾脉冲干涉实验结果图 (a) 2.9 m处光谱图; (b) 2.9 m处相机采集条纹; (c) 17.4 m处光谱图; (d) 17.4 m处相机采集条纹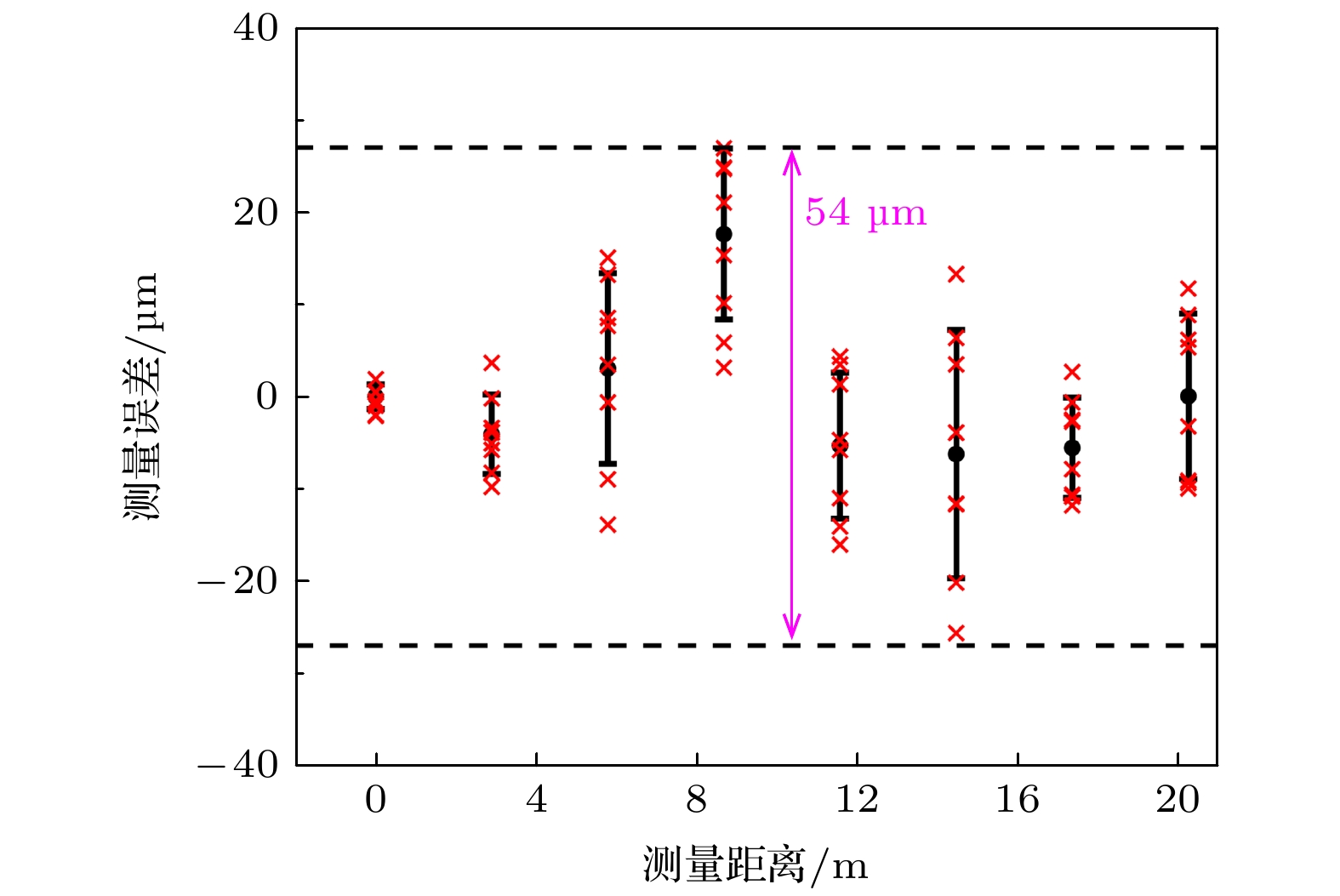 图 7 距离测量结果
图 7 距离测量结果 图 8 长时间距离测量实验结果 (a) 数据散点图; (b) 测距结果阿伦方差
图 8 长时间距离测量实验结果 (a) 数据散点图; (b) 测距结果阿伦方差