全文HTML
--> --> -->精确测量超高峰值功率激光的时空耦合特性具有重要意义, 许多****开展了相关的研究. 2019年, 李朝阳等[14]提出了利用杨氏双缝干涉测量双缝间脉冲前沿相对延迟的方法, 通过一维扫描可以获得整个光束近场的脉冲前沿分布, 但是该方法无法获取光束横截面内各点的脉冲宽度、时域波形等信息; 2016年, Pariente等[15]提出用迈克耳孙干涉仪时域扫描实现三维电场重建的方法, 该方法能够恢复出三维光电场分布, 但是需要极高的扫描精度以及复杂的迭代算法; 此外还有时空分辨全息测量[16]、多光谱哈特曼传感器[17]等时空耦合特性单次测量方法, 均是牺牲了一定的空间分辨能力来换取光谱分辨能力, 但是仅能测量数个波长的谱相位和谱强度, 频域分辨能力有限, 难以根据频域信息准确得到脉冲的时域信息. 虽然目前已经提出了多种测量时空耦合特性的方法, 但大都存在一些问题, 无法广泛应用.
超高峰值功率激光的时域脉冲宽度极窄, 仅有数十飞秒量级, 难以直接探测, 相比之下频域的信息更容易获得—用空谱干涉法可以将频域信息映射到空间域, 并用CCD采集, 频谱强度和频谱相位信息都包含在CCD采集到的条纹图中. 空谱干涉法最早于1997年由Meshulach等[18]提出, 首先用柱透镜将参考光与待测光线聚焦, 两者入射方向存在微小夹角, 再利用光栅将参考光与待测光沿垂直焦线方向色散展开, 用CCD采集干涉条纹图, 根据条纹图可获取待测光与参考光的谱相位差, 并进一步获得激光的时域特性. 空谱干涉法被提出后, 被广泛用于精确的延时测量、光路调节等方面[19,20]. 2007年, Bowlan等[21]用光纤对光束进行点取样, 然后用空谱干涉获取该点的谱强度和谱相位信息, 并通过在光束口径内网格化取点扫描, 获取激光脉冲的时空耦合特性.
事实上, 用空谱干涉法得到的条纹图是一个二维图像, 可以包含两个维度的信息, 以上方法都只用它反映了频域一个维度的信息, 另一维度信息并没有利用. 本方案用狭缝对激光近场进行一维空间采样, 再用空谱干涉法将其在频域展开, 得到的条纹图包含了频域以及一个空间维度的信息, 只需要在另一空间维度上扫描即可获取完整的近场时空耦合特性, 相比于点扫描空谱干涉, 更便捷、效率更高. 该方法的重点在于根据条纹图像恢复频域和空域的谱相位信息.










以上方法每次只能获取狭缝采样区的谱相位信息















3.1.实验装置
为了验证空谱干涉扫描获取超短脉冲近场时空特性的有效性, 搭建了测试平台, 光路图如图1所示. 图 1 实验平台光路示意图
图 1 实验平台光路示意图Figure1. Schematic of the experimental light path.
图1中Laser是激光器, M1—M7为平面反射镜, BE1和BE2为扩束和缩束透镜组, BS1和BS2为分光镜, Slit是狭缝, SP为成像光谱仪, PC是计算机, WG是楔形玻璃. 激光首先被BE1扩束至1.5 cm, 经BS1分成参考光和待测光, 待测光经M5和M6反射后到达BS2处, 在待测光路中插入楔形玻璃可引入时空耦合; 参考光经过M1—M4构成的延时调节器到达BS2处与待测光汇合, 经BE2缩束、M7反射后使用狭缝slit采样, 最终输入成像光谱仪SP; 平面镜M7可以沿垂直于狭缝slit的方向移动, 以便用狭缝对光束口径内不同位置进行采样. 成像光谱仪采集到的空谱干涉条纹图经计算机处理, 恢复激光近场谱强度和谱相位信息.
2
3.2.实验方法
在空谱干涉实验光路部分, 调节光路使参考光与待测光传输方向一致、光斑重合, 此时参考光与待测光夹角
 图 2 干涉条纹图
图 2 干涉条纹图Figure2. Interference fringes.
获取激光近场时空耦合特性需要知道近场各空间点的谱强度和谱相位信息, 空谱干涉扫描得到的数据是一系列的干涉条纹图, 从干涉条纹图中提取近场谱强度和谱相位的过程如下.
1)成像光谱仪标定, 确定像素坐标与波长的对应关系; 2)对图像重新抽样, 使像素点在角频率域等间隔分布, 方便后续图像处理; 3)条纹图二值化, 将原灰度图像变换到频率域(如图3(a))进行带通滤波(如图3(b)), 去掉高频噪声, 同时去掉直流成分, 使图像亮条纹处像素值大于0, 暗条纹处像素值小于0(如图3(c)), 将图像与0比较可将图像二值化(如图3(d)); 4)条纹中心提取, 对二值化图像进行开运算与闭运算, 去掉图像的噪点、孔洞、断裂等, 再将图像细化, 得到条纹骨架, 即亮条纹中心位置(如图3(e)); 5)条纹级次标记, 先进行连通域识别, 区分单条条纹并分别进行标记, 再根据条纹位置依次重新标记条纹的级次(如图3(f)); 6)计算图像中任一像素点的谱相位, 条纹级次乘以




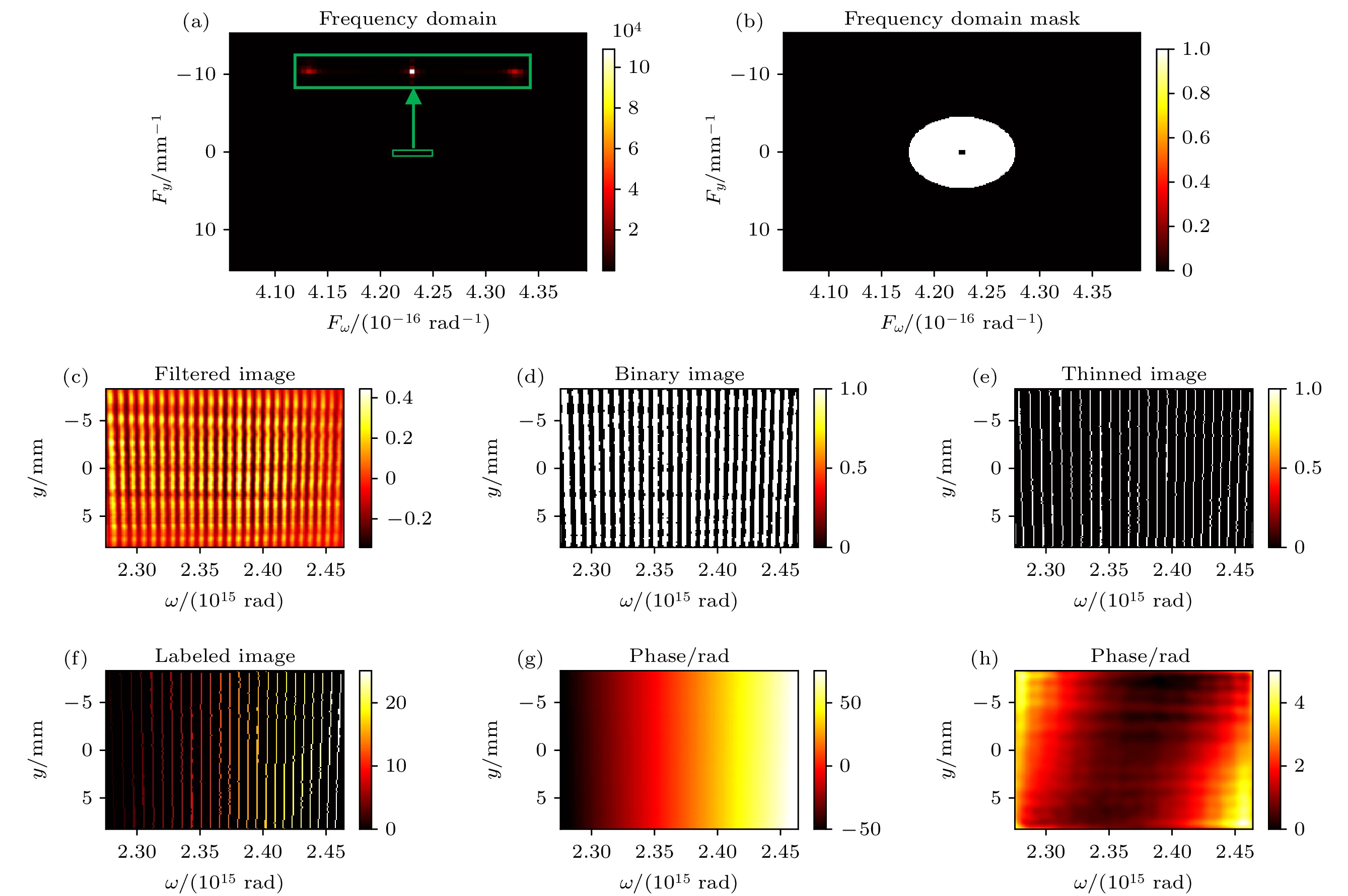 图 3 谱相位提取过程 (a) 干涉条纹频域图像; (b) 频域带通滤波器; (c) 频域滤波后干涉条纹图; (d) 二值化干涉条纹图; (e) 细化图像, 提取干涉条纹中心; (f) 干涉条纹级次标记; (g) 谱相位图; (h)去除线性项后的谱相位图
图 3 谱相位提取过程 (a) 干涉条纹频域图像; (b) 频域带通滤波器; (c) 频域滤波后干涉条纹图; (d) 二值化干涉条纹图; (e) 细化图像, 提取干涉条纹中心; (f) 干涉条纹级次标记; (g) 谱相位图; (h)去除线性项后的谱相位图Figure3. Spectral phase recovery process: (a) Frequency domain image; (b) frequency domain bandpass filter; (c) filtered image; (d) binary image; (e) thinning image and identify the center of the stripe; (f) labeled the order of stripes; (g) spectral phase; (h) spectral phase (remove the linear terms).
提取谱强度信息时, 遮挡参考光, 使干涉条纹消失, 通过x方向扫描狭缝可以获得近场光束横截面内任意空间点的谱强度; 也可以预先标定参考光谱强度, 根据干涉条纹图即可恢复待测光谱强度信息, 不需要重复扫描.
得到近场光束横截面内各个空间点的谱强度和谱相位信息后, 便可通过对各个空间点进行频域到时域的傅里叶逆变换, 从而获得近场时空特性.
图3(a)为条纹图的频域图像, 其中心的亮斑是条纹图的直流成分; 图3(b)是频域滤波器, 白色部分值为1, 黑色部分值为0, 构成一个带通滤波器, 过滤掉0频率附近的直流成分以及一些高频噪声, 只保留条纹的主要信息; 图3(c)是滤波后的条纹图, 由于在频域中过滤掉了其直流分量, 所以亮条纹部分的值大于0, 暗条纹部分的值小于0, 将像素值与0比较即可获得它的二值化图像(图3(d)). 图3(e)是图3(d)经过细化处理后得到的亮条纹中心, 图3(f)是对亮条纹中心进行级次标记的结果, 图中不同颜色表示不同条纹级次; 图3(g)是经过插值拟合后初步得到的相位图, 其中包含了谱相位的线性项(一阶色散), 它仅表示参考光与信号光的相对延迟; 图3(h)是图3(g)去掉谱相位线性项后的结果; 取图3(h)中某一行, 即代表该行所在y坐标、狭缝所在x坐标位置处的谱相位曲线, 根据该点的谱强度和谱相位就能计算出其时域特征.
2
3.3.实验结果
为了验证以上方法的测量精度, 在近场待测光路中插入参数已知的劈板引入时空耦合畸变, 对比模拟计算结果和实际测量结果. 由于材料的色散特性, 不同波长的光在材料中折射率不同, 宽带光经过劈板后, 不同波长成分折射角不同, 使激光产生角色散. 根据劈板的参数, 模拟计算得到其引入的角色散, 与根据空谱干涉测量得到的角色散对比如图4所示.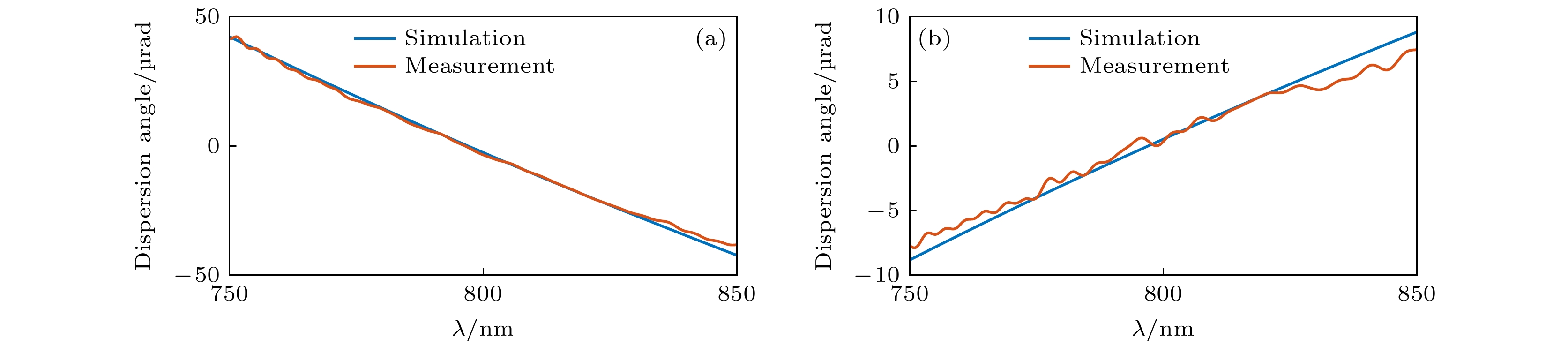 图 4 劈板引入角色散图 (a) 1号劈板引入角色散; (b) 2号劈板引入角色散
图 4 劈板引入角色散图 (a) 1号劈板引入角色散; (b) 2号劈板引入角色散Figure4. Angular dispersion caused by wedged glass: (a) Angular dispersion caused by wedged glass No.1; (b) angular dispersion caused by wedged glass No.2.
1号劈板(记为WG1)楔角为2.4°, 材料为K9玻璃, 中心厚度7.5 mm, 引入的角色散如图4(a)所示; 2号劈板(记为WG2)楔角为0.5°, 材料为K9玻璃, 中心厚度3.2 mm, 引入的角色散如图4(b)所示. 1号劈板引起的角色散测量值与理论计算值最大误差为4.2 μrad, 2号劈板测量值与理论计算值最大误差为2.0 μrad, 测量结果与理论计算值符合得较好.
图5是在待测光路中加入1号劈板, 并根据单次采集结果恢复的谱相位测量结果和时空特性, 由于是单次采集, 所以只包含了一个空间维度的测量结果. 图5(a)是根据1号劈板参数模拟计算得到的谱相位, 对某一特定波长, 谱相位随y坐标是线性变化的, 且随着波长改变, 谱相位随y坐标变化的斜率也发生变化, 这说明劈板引入了角色散, 使各波长的波前方向不同; 对频域信息做傅里叶逆变换, 可以得到时域信息, 如图5(b)所示. 可以看出, 脉冲包络出现时间随y坐标变化, 说明劈板引起了近场的脉冲前沿倾斜. 图5(c)和图5(d)分别是谱相位和时空特性的实际测量结果, 分别与图5(a)和图5(b)对应, 测量结果与模拟计算结果高度一致, 说明该测量方法可以有效反映待测光的时空特性.
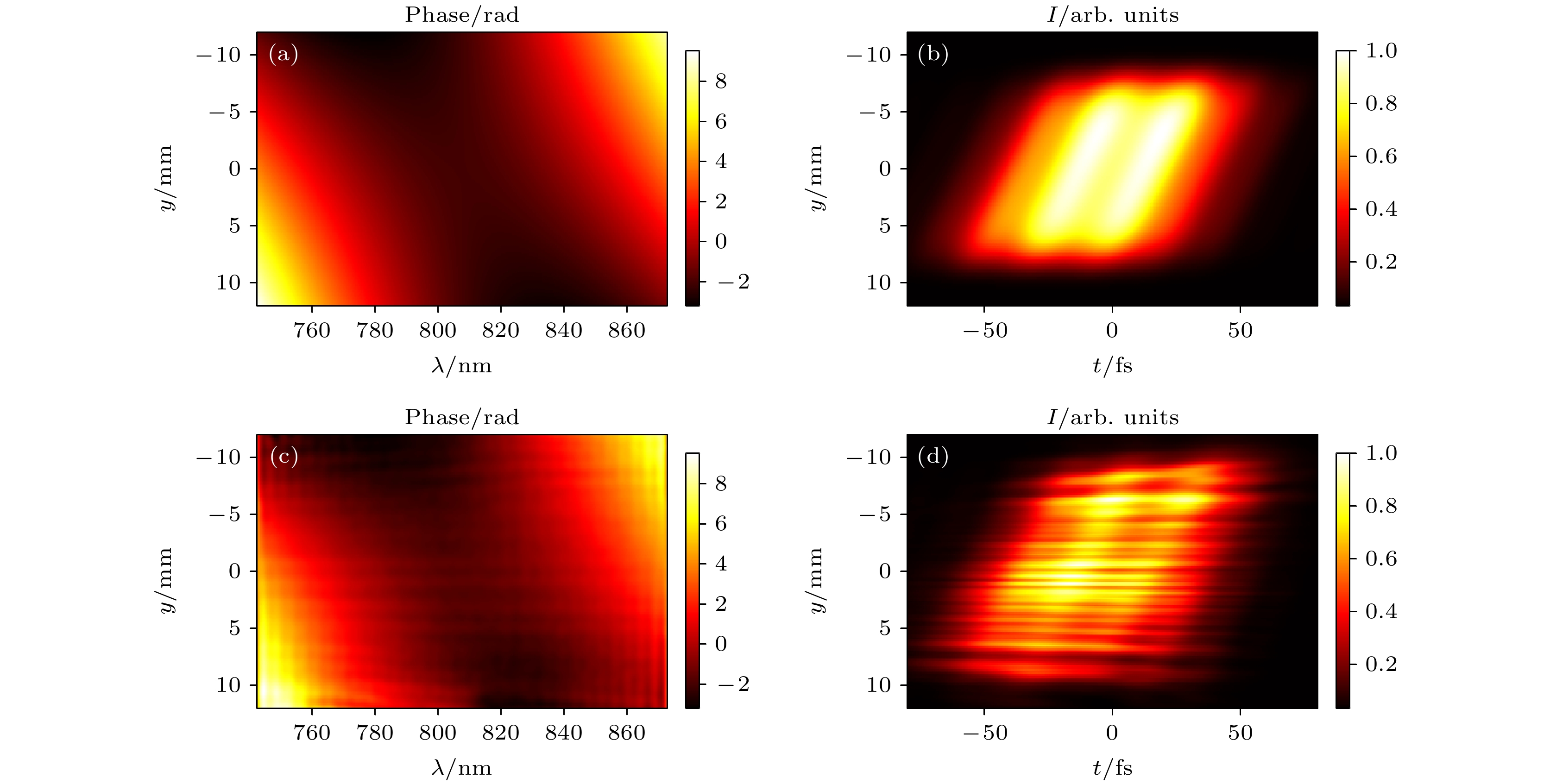 图 5 加入1号劈板单次采样 (a) 谱相位信息模拟计算结果; (b) 时空耦合特性模拟计算结果; (c) 谱相位信息测量结果; (d) 时空耦合特性测量结果
图 5 加入1号劈板单次采样 (a) 谱相位信息模拟计算结果; (b) 时空耦合特性模拟计算结果; (c) 谱相位信息测量结果; (d) 时空耦合特性测量结果Figure5. Single sampling results (insert WG1): (a) Spectral phase simulation results; (b) spatiotemporal coupling characteristics simulation results; (c) spectral phase measurement results; (d) spatiotemporal coupling characteristics measurement results.
图6是整个光斑近场时空特性的模拟和实际测量结果. 图6(a), 图6(b)和图6(c)分别是光强随空间分布、脉冲前沿随空间分布和脉冲宽度随空间分布的模拟结果; 图6(d), 图6(e)和图6(f)分别是光强随空间分布、脉冲前沿随空间分布和脉冲宽度随空间分布的实际测量结果. 测量结果是通过沿x方向移动狭缝, 对不同x位置进行扫描, 并将各x位置的测量结果进行拼接得到的. 实际测量得到的脉冲前沿和脉冲宽度随空间位置的变化规律与模拟结果符合得较好. 从实验测量结果看, 脉冲前沿的测试值与模拟结果在数值上符合得更好, 但脉冲宽度的测试值与模拟结果差异相对较大, 这是因为超宽带激光的脉冲宽度对谱相位和谱强度的变化非常敏感, 谱相位提取误差、谱强度空间分布不均匀(模拟计算中假定谱强度的空间分布是均匀的)、实验中空气扰动及光学元件面型畸变(模拟计算中未考虑)等因素共同叠加, 最终导致了脉冲宽度的测量值与模拟结果差别较大.
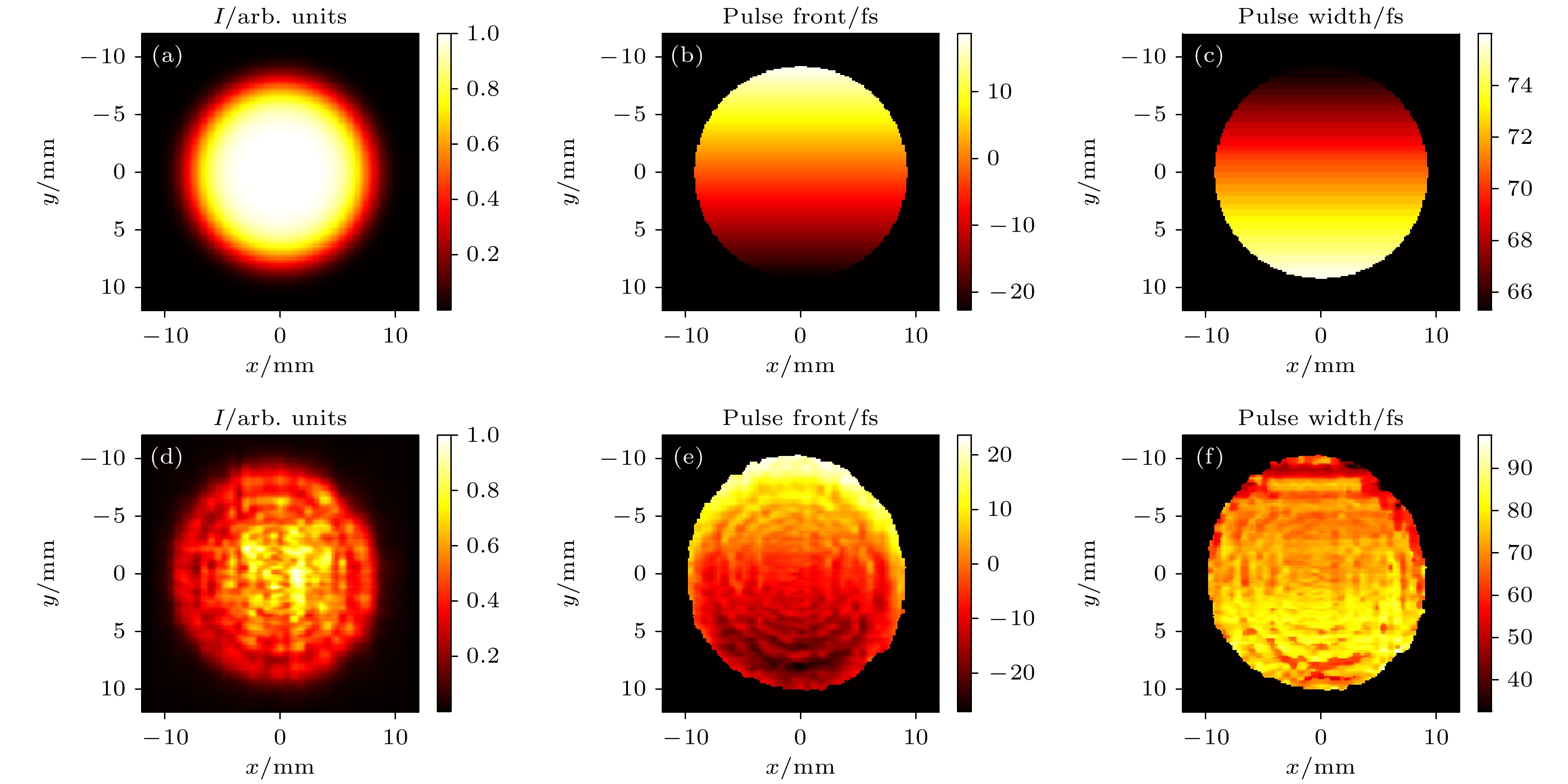 图 6 加入1号劈板近场时空特性 (a) 近场光斑模拟结果; (b) 近场脉冲前沿模拟结果; (c) 近场脉冲宽度模拟结果; (d) 近场光斑测量结果; (e) 近场脉冲前沿测量结果; (f) 近场脉冲宽度测量结果
图 6 加入1号劈板近场时空特性 (a) 近场光斑模拟结果; (b) 近场脉冲前沿模拟结果; (c) 近场脉冲宽度模拟结果; (d) 近场光斑测量结果; (e) 近场脉冲前沿测量结果; (f) 近场脉冲宽度测量结果Figure6. Near-field spatiotemporal characteristics (insert WG1): (a) Near field intensity simulation results; (b) near field pulse front simulation results; (c) near field pulse width simulation results; (d) near field intensity measurement results; (e) near field pulse front measurement results; (f) near field pulse width measurement results.
图7和图8是在光路中加入2号劈板的模拟和测量结果, 由于2号劈板相比于1号劈板楔角更小, 厚度更薄, 所以对测量精度有更高的要求. 对比图7和图8中的模拟和测量结果可以看到, 测量结果可以正确反映脉冲前沿、脉冲宽度随空间位置变化的规律, 但是在数值上与模拟计算结果存在一定差距, 需要进一步优化实验装置和计算方法来达到更高的精度.
 图 7 加入2号劈板单次采样 (a) 谱相位信息模拟计算结果; (b) 时空耦合特性模拟计算结果; (c) 谱相位信息测量结果; (d) 时空耦合特性测量结果
图 7 加入2号劈板单次采样 (a) 谱相位信息模拟计算结果; (b) 时空耦合特性模拟计算结果; (c) 谱相位信息测量结果; (d) 时空耦合特性测量结果Figure7. Single sampling results (insert WG2): (a) Spectral phase simulation results; (b) spatiotemporal coupling characteristics simulation results; (c) spectral phase measurement results; (d) spatiotemporal coupling characteristics measurement results.
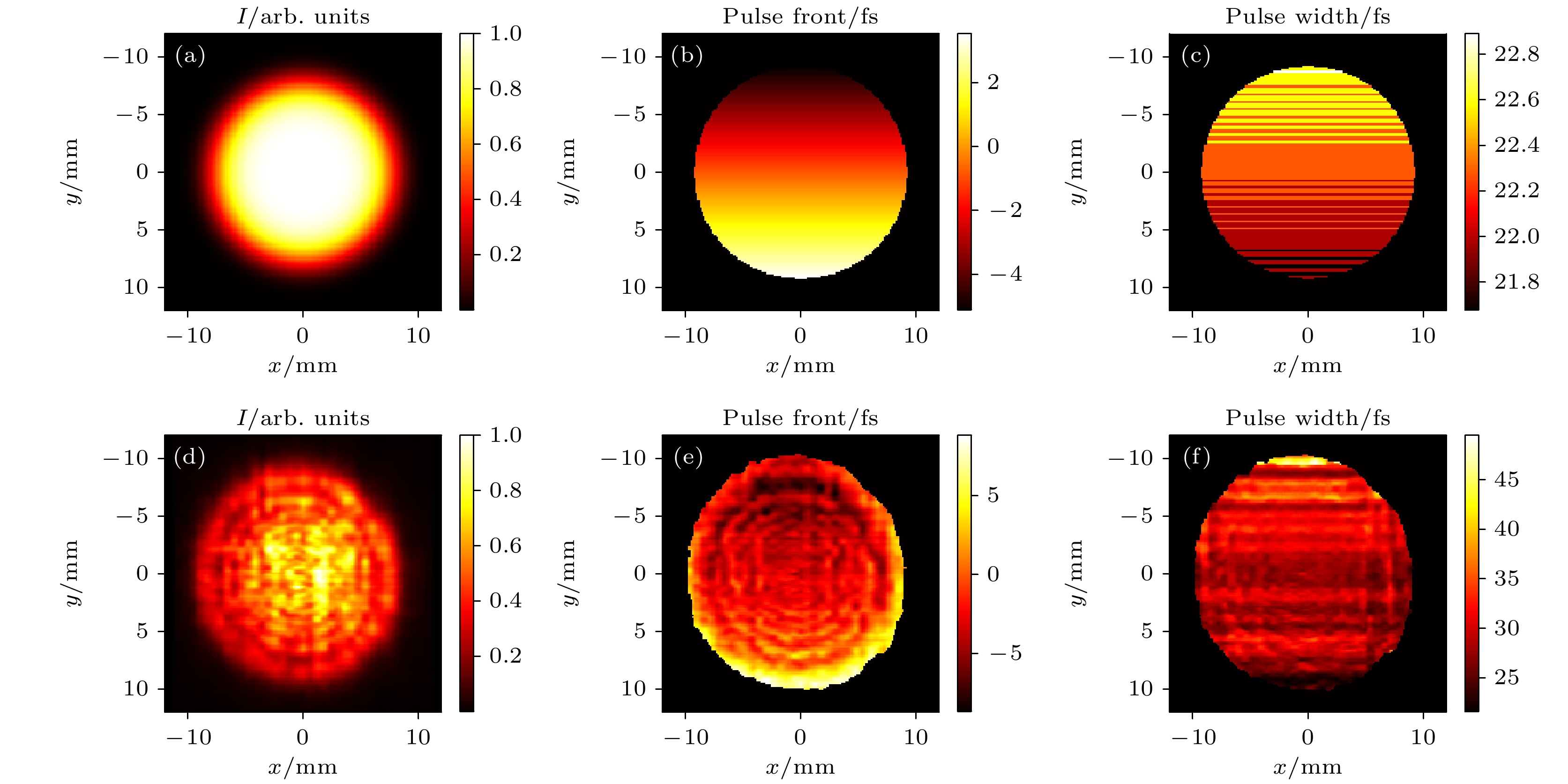 图 8 加入2号劈板近场时空特性 (a) 近场光斑模拟结果; (b) 近场脉冲前沿模拟结果; (c) 近场脉冲宽度模拟结果; (d) 近场光斑测量结果; (e) 近场脉冲前沿测量结果; (f) 近场脉冲宽度测量结果
图 8 加入2号劈板近场时空特性 (a) 近场光斑模拟结果; (b) 近场脉冲前沿模拟结果; (c) 近场脉冲宽度模拟结果; (d) 近场光斑测量结果; (e) 近场脉冲前沿测量结果; (f) 近场脉冲宽度测量结果Figure8. Near-field spatiotemporal characteristics (insert WG1): (a) Near field intensity simulation results; (b) near field pulse front simulation results; (c) near field pulse width simulation results; (d) near field intensity measurement results; (e) near field pulse front measurement results; (f) near field pulse width measurement results.
2
3.4.不足及改进措施
目前的实验和计算方法还有一些不足之处有待改进, 在计算方法方面, 谱相位的计算是先提取条纹中心位置, 再插值拟合获取各波长、各空间点的谱相位, 相当于只利用了亮条纹中心的数据点, 对于调制周期小于亮条纹间隔的谱相位变化无法识别, 后续需进一步优化算法, 直接利用干涉条纹图的灰度信息来恢复谱相位, 有利于提高识别精度.在实验方面, 观察图6(d)和图8(d) 可以发现, 光斑存在衍射环, 这种衍射效应在图5(d)和图7(d)中也有体现, 表现为光强在y方向上有明显调制, 这些衍射环会对条纹图造成影响, 引起谱相位识别误差, 后续计划利用软边光阑及像传递等方式降低自由传输引起的衍射调制的影响.
前述的实验中需要多次扫描才能获得完整的近场时空特性, 不便于在大型单发次的超高峰值功率激光装置使用, 下一步考虑用多组并行的一维空间分辨空谱干涉系统同时对近场x方向和y方向进行阵列化测量, 以便通过单次测量获取激光束完整的时空特性.
