全文HTML
--> --> -->近年来的研究表明, 液滴蒸发过程的动态特性与固体表面温度[4]、液体性质[5]、固体材质[6]和环境条件[7]密切相关. 除此之外, 存在于实际表面上的接触角迟滞[8]也是影响液滴运动的重要因素. 理论上讲, 对于任意一个理想表面, 都可以由Young方程,

目前, 已有实验研究了液滴蒸发过程中接触角迟滞的影响. Yu等[12]通过在自组装分子层上微液滴的蒸发实验, 发现蒸发模式的转变源于接触角迟滞的存在. Li等[13]发现接触线钉扎与接触角迟滞有关, 而接触线钉扎是咖啡环沉积形成的必要条件, 接触角迟滞直接影响液滴蒸发模式, 从而影响沉积模式, 液滴长时间附着在固体表面是由接触角迟滞引起的. Trybala等[14]通过实验探究了含无机纳米颗粒的悬浮液的固着液滴在三种不同润湿性基材(PE, PTFE和硅片)上的蒸发动力学行为, 指出当未达到静态后退接触角时, 三种表面上的液滴蒸发过程包括定接触线(CCR)和定接触角(CCA)两个阶段, 或仅呈现CCR阶段; 与纯水蒸发的普遍特征相比, 在所使用基底上观察到了良好一致性, 仅前进接触角和后退接触角数值有差异. Kulinich和Farzaneh[15]观察了具有相同接触角(≥ 150°)、不同钝化程度的超疏水聚合物表面上的蒸发模式, 发现在高迟滞表面上液滴蒸发遵循CCR模式, 而在低迟滞表面上则遵循CCA模式; 固着水滴的蒸发行为不是由高接触角决定, 而是受润湿滞后(或后退接触角)控制. Lin等[16]实验研究了6种不同表面粗糙度的聚甲基丙烯酸甲酯(PMMA)基底上水滴蒸发的动力学行为, 同样发现当壁面粗糙度增加时, 从CCR模式向CCA模式的转变延迟, 后退接触角也减小. Kuznetsov等[17]研究了不同粗糙度的铜表面上蒸馏水的蒸发特性, 发现液滴接触半径和钉扎持续时间随粗糙度增加而增大, 可通过改变基底粗糙度来控制液滴的铺展过程.
关于液滴蒸发过程的理论研究, 通常针对接触线动力学的不同阶段建立不同的数学模型[18-20]进行描述. 其中, Semenov等[20]通过建立CCR和CCA模型描述接触角迟滞条件下固着液滴蒸发过程的两个阶段: 在CCR模型中, 假设液滴为球形, 接触半径始终等于其初始值L0, 仅研究接触角的演化; 在CCA模型中, 接触角被设定为常数并等于θr, 仅研究接触半径的演化, 即从L0减小到几乎为零. 虽然分开描述这两个阶段可以清晰得到各阶段的运动特征, 但却不能捕捉从CCR过渡到CCA时的重要动态特征, 因此不能全面刻画液滴蒸发过程的运动学特征. 此外, 还有****利用润滑近似理论研究液滴在加热表面的动力学过程. Karapetsas等[21]通过将接触线速度和动态接触角与平衡接触角之间的差耦合成一个关系式来模拟接触线运动, 并引入不同界面张力对温度的敏感性, 研究了非等温倾斜固体基底上液滴的二维动力学, 证明了温度引起的平衡接触角变化会引起复杂的动力学过程. Ye等[22]进一步研究了均匀加热基底上固着液滴蒸发时的动力学特性, 分析了气-液、固-气和固-液界面张力温度敏感性对壁面润湿性对液滴动态特性的影响, 表明通过改变固-气界面张力温度敏感系数调控处于蒸发状态下的液滴运动更加有效. 此外, 叶学民等[23]研究了不同加热条件下温度影响壁面润湿性及铺展过程的内部机理, 发现随温度梯度增大, 液滴所受Marangoni效应增强, 从而加快液滴向低温区的铺展速率.
上述实验研究表明, 接触角迟滞是影响液滴蒸发动力学特征的重要因素. 针对不同阶段建立的不同蒸发模型易忽略过渡阶段间的重要动态过程, 且模型不具有整体性, 而基于润滑理论建立的已有模型虽能描述整个液滴蒸发过程, 但考虑的均为理想表面, 未涉及接触角迟滞对实际表面上液滴润湿性的影响, 因此也不能完整刻画液滴的实际蒸发动力学特征. 此外, 在加热表面上的液滴界面张力受温度影响, 但至今尚未有能够准确测量固-液、固-气界面张力的可靠方法, 同时固-液、固-气界面张力温度敏感性系数也不易调控, 一般采用气-液界面张力的温度敏感性描述壁面润湿性对液滴运动特性的影响. 为此, 本文依据相关实验结果, 通过引入接触角迟滞模型, 基于润滑理论和滑移边界条件建立二维液滴厚度的演化方程, 采用数值计算方法模拟液滴蒸发全过程的动力学特征, 分析接触角迟滞对接触角、接触线位置和移动速度、蒸干时间等典型特征量的影响, 阐明接触角迟滞影响液滴蒸发动态过程的内在机理, 并分析考虑接触角迟滞时气-液界面张力的温度敏感性对液滴蒸发过程的影响.
2.1.理论模型
假设一不可压缩液滴在均匀加热的固体表面上不断蒸发, 如图1所示, 液滴初始最大厚度为






 图 1 液滴在加热表面铺展示意图
图 1 液滴在加热表面铺展示意图Figure1. Schematic of a drop disposed on a horizontally heated substrate.
液滴运动过程的控制方程包括连续性方程、动量方程和能量方程:












在气-液界面






在气-液界面



界面处的蒸发流量与界面温度有关, 可表示为



在壁面


壁面温度满足



将控制方程和边界条件采用下式进行无量纲化:




通过无量纲变换和保留数量级 ≥ Ο(ε), 可得无量纲控制方程组为

无量纲边界条件为




由(19)式和(24)式可得

无量纲形式的界面张力与温度关系为
液滴在理想光滑表面上, 在三相接触线处, Young方程[26]为

由于在液膜厚度演化模型推导过程中, 采用润滑理论对液滴纵横比进行了放大, 因此, 液滴平衡接触角也需进行相应放大, 即cos



为描述接触角迟滞影响, 采用以下线性经验关联式描述前进接触角和后退接触角与迟滞角之间的关系[27]:

接触线处的液滴高度为零, 即h(x = xcl = xcr, t) = 0, 其中xcl和xcr分别代表左侧和右侧接触线位置. 采用下式描述接触线移动速率与接触角间的关系[28](下标c代表接触线):
计算初始条件为
基于Karapetsas等[21]提出的坐标变换法, 将瞬态物理域(x, t)映射到固定计算域(x', t'),
数值求解采用Freefem++14.3, 该软件是求解偏微分方程的强大工具, 是一款免费的、开放源代码的有限元计算软件, 目前已经比较成熟地运用在各类数值模拟中, 对于液滴、液膜的流体数值计算[30-32]也很常见. 该软件采用Delaunay算法生成离散偏微分方程所需网格, 具有网格自适应和移动网格生成的功能; 采用稀疏矩阵存储格式, 内存需求少, 计算速度快, 是求解复杂区域问题的高效计算软件.
2
2.2.计算模型验证
参照朱仙仙等[33]用4 μL去离子水在加热温度为60°的玻璃表面上的蒸发实验数据, 换算得到无量纲参数, 各参数取值为: ε = 0.1, A = 0.39, B = 0.007, m = 3, C = –0.004, Bo = 0.007, Ca = 0.5, K = 10, E = 1 × 10-3, Ωlg = 0.003. 首先, 为了验证数值模拟结果的准确性, 将接触角和接触线随时间变化的实验结果无量纲化后与模拟值进行对比, 结果如图2(a)和图2(b)所示. 可以看出, Δθ = 0.27时的模拟值与实验结果总体符合良好, 即采用考虑接触角迟滞的理论模型可更准确地反映液滴的运动过程. 值得注意的是, 朱仙仙等[33]所给实验结果并未呈现液滴铺展阶段, 可能是由此阶段变化较快、不易观测记录所致; 模拟结果和实验结果有偏差的原因可能是实验时基底加热时受热不均匀或者基底传热能力不一致, 也有可能是基于润滑理论建立模型时, 未考虑液滴蒸气扩散[34]所致. 图 2 计算模型的验证 (a) 接触角的演化过程; (b) 接触线的演化过程; (c) 网格无关性验证
图 2 计算模型的验证 (a) 接触角的演化过程; (b) 接触线的演化过程; (c) 网格无关性验证Figure2. Verification of the computational model: (a) Evolution of contact angle; (b) evolution of contact line; (c) validation of grid independence.
此外, 模拟时进行了网格无关性验证, 在x方向上对比了网格数为300, 500和800的结果, 发现增加网格数使计算时长增大, 而各特征参数计算结果数值差距不大, 以图2(c)的接触线演化过程为例, 网格数为500时可同时满足精确性与高效性的要求. 因此, 计算中时间步长设为10–6, 将[0, 2] × [0, 1]的计算域划分为 500 × 2 个均匀网格. 因方程(27)是一维的, 液滴厚度h与y方向无关, 所以为节约计算时间, 在y方向仅划分2层网格.

2
3.1.不同迟滞角的影响
Gatapova等[35]和Chu等[36]通过测量不同表面上多种液滴的接触角迟滞特征发现, 迟滞角Δθ范围为0—90°. 为保证θa > 0和θr > 0, 代入(30)式和(31)式, 可得0 < Δθ < 1.4; 由于本文初始液滴的表观接触角为1.1, 为保证蒸发动态过程的完整呈现, 则有0 < Δθ < 0.6. 为探究不同迟滞角对液滴运动过程的影响, 下面选取Δθ = 0.27, 0.35和0.40开展分析, 其他参数保持不变, 因液滴运动过程中始终保持在x = 0两侧对称, 下面以右侧特征参数来阐明其动态过程.图3—图5为液滴演化过程的动态特征. 图3表明, 三种情形下的接触角、接触线及其移动速度变化趋势大致相同, 液滴演化过程均可分为液滴铺展、接触线钉扎和去钉扎三个阶段(图3(b)和图3(c)), 但各阶段的参数变化和持续时间却有明显不同, 各阶段开始时刻及持续时间如表1所列, 图3中以Δθ = 0.27为例用虚线划分各个阶段.
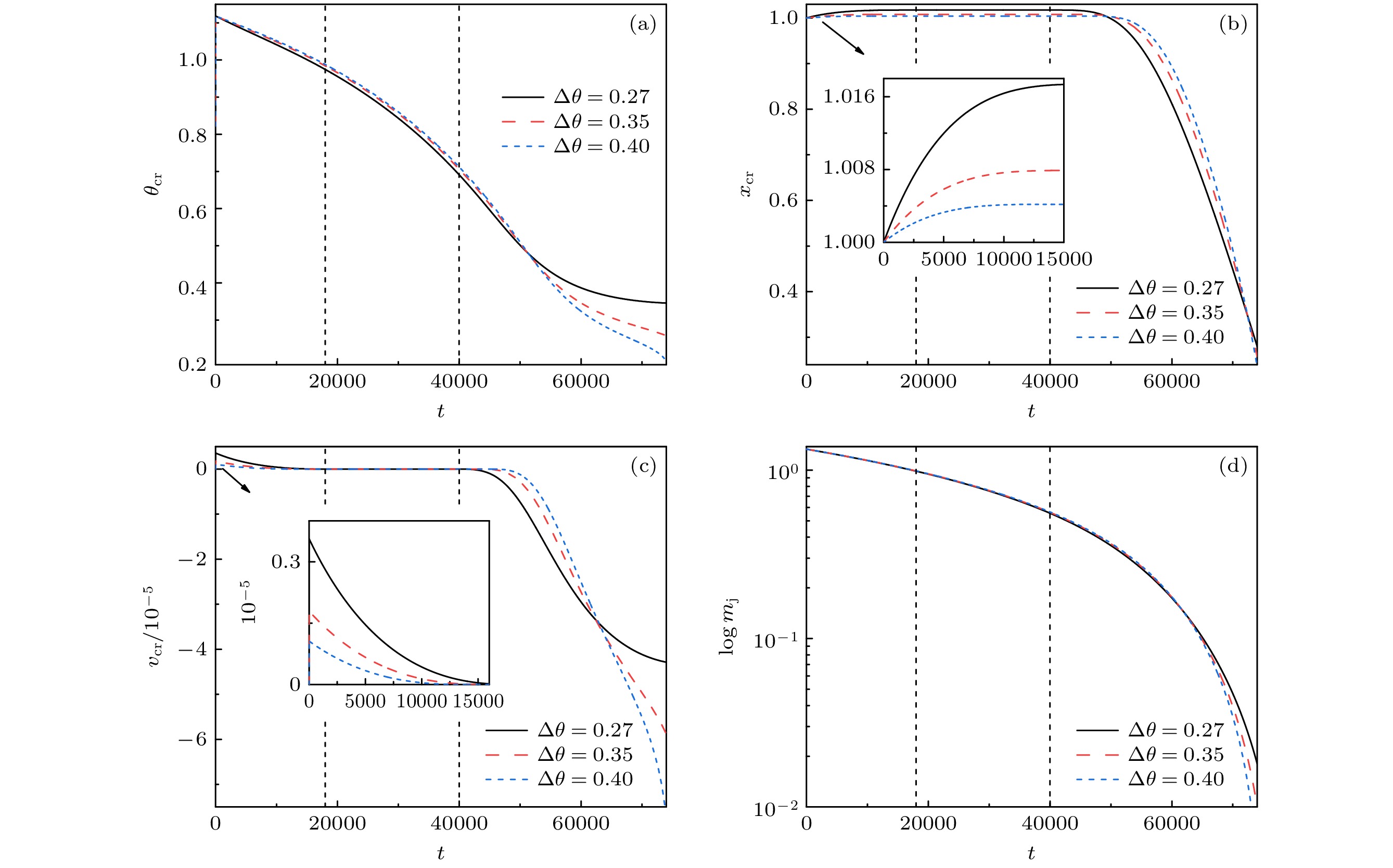 图 3 不同Δθ时液滴演化过程中的特征参数变化 (a) 接触角; (b) 接触半径; (c) 接触线移动速度; (d) 蒸发剩余质量
图 3 不同Δθ时液滴演化过程中的特征参数变化 (a) 接触角; (b) 接触半径; (c) 接触线移动速度; (d) 蒸发剩余质量Figure3. Characteristic parameters of drop evolution with time at different Δθ: (a) Dynamic contact angle; (b) contact line; (c) contact line velocity; (d) remaining mass.
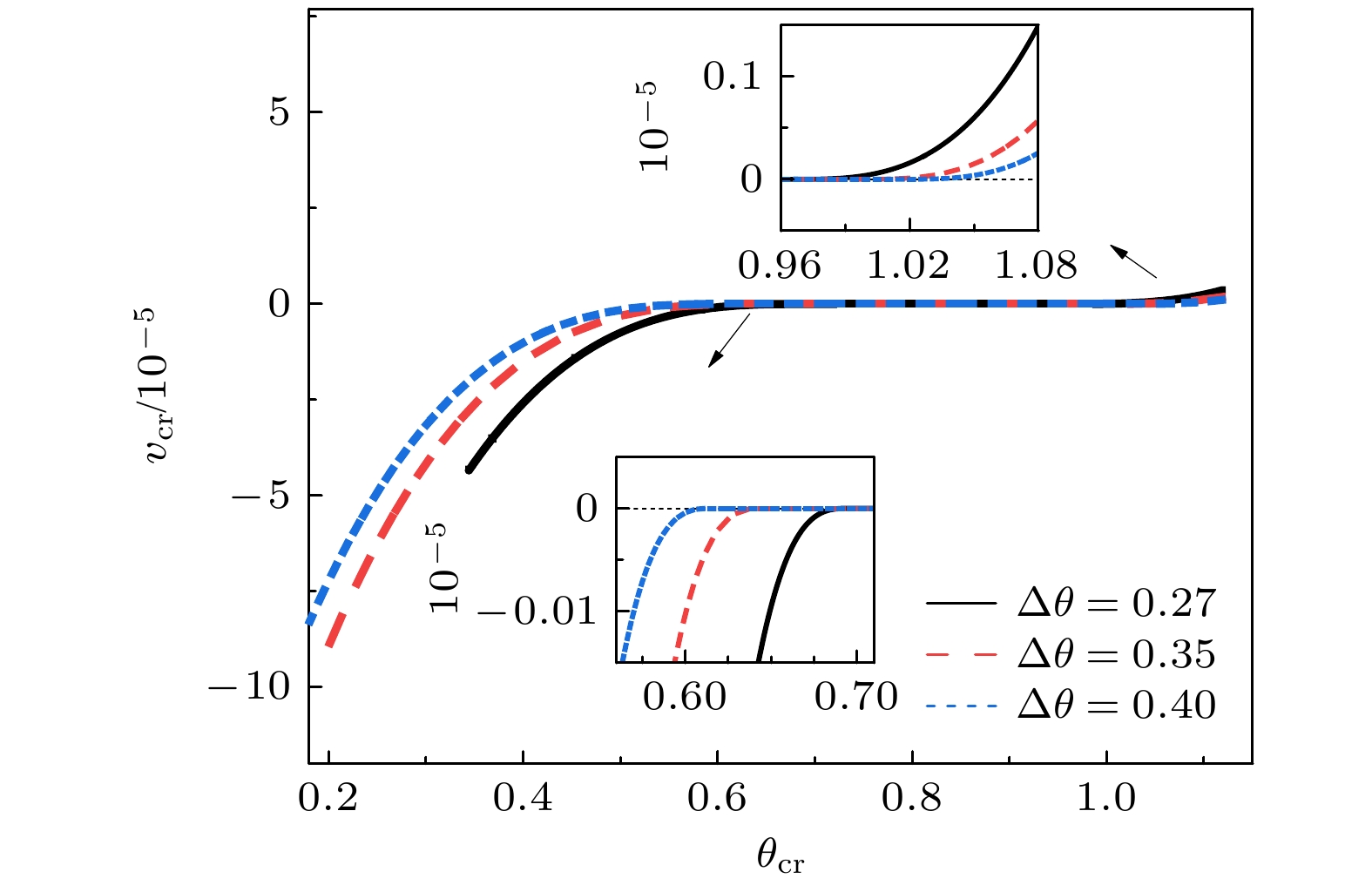 图 5 动态接触角与接触线移动速度关系图
图 5 动态接触角与接触线移动速度关系图Figure5. Relation between the dynamic contact angle and velocity of contact line.
| Δθ | 钉扎时刻 | 去钉扎时刻 | 蒸干时刻 | 铺展阶段 | 钉扎阶段 | 去钉扎阶段 |
| 0.27 | 18910 | 39750 | 78000 | 0—18910 | 18910—39750 | 39750—78000 |
| 0.35 | 16530 | 43250 | 76200 | 0—16530 | 16530—43250 | 43250—76200 |
| 0.40 | 14620 | 45100 | 74600 | 0—14620 | 14620—45100 | 45100—74600 |
表1不同Δθ对液滴演化时间的影响
Table1.Effect of varied Δθ on the drop evolution time.
由表1可知, Δθ = 0.27下液滴开始钉扎和去钉扎的时刻分别为t = 18910和t = 39750, Δθ = 0.35下开始钉扎和去钉扎的时刻为t = 16530和t = 43250, 而Δθ = 0.40下则为t = 14620和t = 45100, 即接触线钉扎开始时刻提前, 去钉扎时刻延后. 由此可知, 增大迟滞角, 延长了接触线钉扎时间, 缩短了铺展阶段和去钉扎阶段时长, 同时加快了液滴蒸干历程.
在铺展阶段, 三种迟滞角下的液滴均表现出接触角不断减小至前进接触角(图3(a)), 接触线向外铺展(图3(b)), 且铺展速度逐渐减慢(图3(c)). 不同的是, 随着迟滞角的增大, 液滴铺展半径和铺展速度减小, Δθ = 0.40时的最大铺展半径仅为1.00417, 远小于Δθ = 0.27和Δθ = 0.35情形. 该阶段液滴铺展直径的增长率通常可表示为(xcr – xcl)与t之间的幂律关系, 三种情形下分别为~t 0.004, ~t 0.002和~t 0.001, 即接触角迟滞降低了铺展速率, 抑制了铺展过程. 另外, Δθ = 0.4情形下的接触角始终大于其他两种情形, 液滴整体的铺展情况受到了显著抑制.
在钉扎阶段, 三种迟滞角下液滴的接触线均钉扎在最大接触半径处不动, 接触角从前进接触角减小至后退接触角, Δθ = 0.4情形下的液滴接触角仍高于其他两种情形下的动态接触角, 这是受到铺展阶段的接触角迟滞影响. Bormashenko等[37]通过实验发现, 水滴在迟滞角度约为50°的铝表面的蒸发, 主要以钉扎方式进行. 在本文中, 钉扎阶段的液滴质量快速减少(图3(d)), 且Δθ = 0.4情形下液滴质量减少了0.59, 占初始液滴总质量的44.36%, 高于Δθ = 0.27和Δθ = 0.35情形的30.83%和39.10%, 即增大接触角迟滞后, 钉扎阶段的液滴蒸发在整个液滴演化过程中起重要作用, 这一结果与Bormashenko等[37]的实验结论在定性上一致, 且迟滞角越大其影响越明显.
在去钉扎阶段, 三种情形下的接触角呈现不断减小的趋势, 液滴不断收缩, 接触线收缩速率均不断增加. 通过计算拟合得到Δθ = 0.27, 0.35和0.40情形下的液滴收缩直径(xcr – xcl)与t的幂律关系分别为~t –9.06, t –8.61和t –7.14, 即较大的接触角迟滞加快了液滴收缩速率, 进一步缩短此阶段时长.
图3(d)表明, 接触角迟滞加快了液滴的蒸干过程. 当t = 74000时, Δθ = 0.40情形下的液滴接近蒸干, 此时液滴质量为0.00479; 而Δθ = 0.27和0.35时的液滴质量为0.01805和0.01009, 分别约是Δθ = 0.27情形下的3.77倍和2.11倍, 即随着迟滞角的增大, 液滴剩余质量减小(图3(d)), 液滴蒸干过程加快.
Brutin等[38]认为液滴蒸发速率与润湿半径和接触角密切相关, 即润湿半径越大、接触角越小, 其蒸发速率越快. 接触角迟滞加快蒸干的原因可归结为: 增大迟滞角使去钉扎阶段的接触角减小, 接触线附近的空气流通阻碍减弱, 同时接触半径增大, 固-液之间接触面积增大, 加强传热, 进而使得液滴蒸干更快.
液滴演化过程如图4所示, 由图4(a)可知, 在铺展阶段, 随着迟滞角的增大, 液滴铺展半径缩小, 液滴厚度增大, 但因该阶段液滴表面温度较低, 蒸发速率较慢, 不同迟滞角下的液滴轮廓差异并不显著. 图4(b)—图4(d)表明, 在去钉扎阶段, 当迟滞角增大时, 液滴收缩速度加快, 液滴厚度减小. 随着时间的推移, 液滴表面温度提高, 蒸发速率也不同程度地增大, 液滴轮廓逐渐显出差异; 由图4(d)可知, t = 74000时, Δθ = 0.27, 0.35和0.40下的液滴收缩半径分别为0.2798, 0.2579和0.2352, 液滴高度分别为0.04825, 0.0291和0.01496, 即迟滞角越大, 液滴收缩半径和高度都越小.
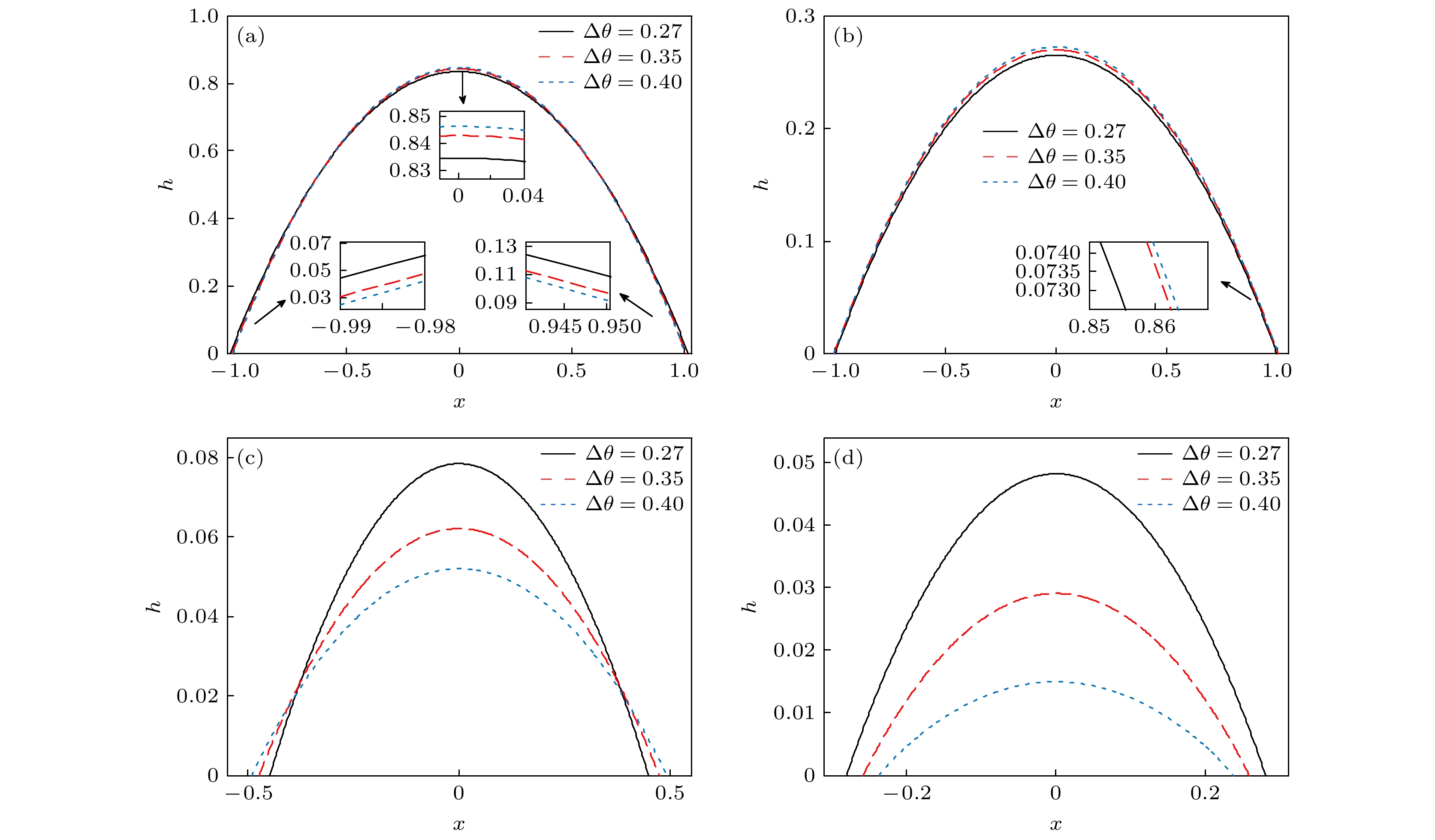 图 4 液滴演化过程轮廓图 (a) t = 10000; (b) t = 50000; (c) t = 70000; (d) t = 74000
图 4 液滴演化过程轮廓图 (a) t = 10000; (b) t = 50000; (c) t = 70000; (d) t = 74000Figure4. Drop profile during the drop evolution process: (a) t = 10000; (b) t = 50000; (c) t = 70000; (d) t = 74000.
图5比较了三种迟滞角下动态接触角与接触线移动速度间的对应关系. 可以看出, 迟滞角对铺展、钉扎和去钉扎阶段等全过程均有不同程度的影响, 在钉扎阶段, Δθ = 0.27下的液滴前进接触角和后退接触角分别为θa = 0.966和θr = 0.696, Δθ = 0.35和0.40下液滴对应于θa = 0.997, θr = 0.647和θa = 1.016, θr = 0.616. 如表2所列, 随着迟滞角的增大, 前进接触角增大, 后退接触角减小, 后退接触角减小的幅度大于前进接触角增大的幅度, 这与Karapetsas等[21]的研究结果一致. 因此, 可通过改变迟滞角来改变前进、后退接触角, 控制接触线钉扎时间, 从而调控液滴蒸发.
| Δθ | θa | θr | Δθa | Δθr |
| 0.27 | 0.966 | 0.696 | 0.106 | –0.164 |
| 0.35 | 0.997 | 0.647 | 0.031 | –0.049 |
| 0.40 | 1.016 | 0.616 | 0.019 | –0.031 |
表2不同迟滞角下θa 和θr 变化
Table2.Variation in θa and θr of drop with different Δθs
2
3.2.不同气-液界面张力温度敏感性的影响
为探讨气-液界面张力对温度的敏感性(以下简称温度敏感性)对液滴蒸发的影响, 将Ωlg由0.003增至0.005和0.01, 其他参数不变, Δθ分别设置为0和0.27. Δθ = 0表示不考虑接触角迟滞的情形. 图6给出了有无迟滞两种情况下, 不同温度敏感性系数对液滴蒸发时的特征参数变化的影响. 图6中以Ωlg = 0.003, Δθ = 0.27为代表用虚线划分各个阶段, 可以清晰地看出, 考虑接触角迟滞与否对液滴蒸发是有影响的, 以Ωlg = 0.003的情况为例, 在液滴铺展阶段, Δθ = 0时的液滴铺展半径变化速率明显高于Δθ = 0.27的情况, 接触角迟滞显著降低了铺展速度, 抑制了铺展过程, 此时Δθ = 0.27时的液滴铺展半径相对Δθ = 0.27情形较小, 而Δθ = 0.27情形下的接触角始终大于Δθ = 0的接触角, 液滴整体的铺展情况受到了显著抑制. 受接触角迟滞的影响, 液滴钉扎时间显著增大, 接触角仍然较大. 在去钉扎阶段, 接触角迟滞加快了液滴收缩速率和接触角减小速率, 从而加快蒸发. 图 6 液滴演化过程中的特征参数变化 (a) 接触角; (b) 接触半径; (c) 接触线移动速度; (d) 蒸发剩余质量
图 6 液滴演化过程中的特征参数变化 (a) 接触角; (b) 接触半径; (c) 接触线移动速度; (d) 蒸发剩余质量Figure6. Characteristic parameters of drop evolution with time: (a) Dynamic contact angle; (b) contact line; (c) contact line velocity; (d) remaining mass.
三种温度敏感性下的液滴演化历程如图6所示, 接触角、接触线及其移动速度变化趋势大致相同. 图6(a)表明, 提高Ωlg后液滴在三个阶段的动态接触角均减小, 而液滴铺展半径(图6(b))和铺展速度(图6(c))增大, 致使钉扎时Ωlg = 0.01的液滴接触线更大, 液滴蒸发更快. 在去钉扎阶段, 液滴的收缩速度随Ωlg的增加而加快, 接触线半径快速减小, 但此阶段Ωlg = 0.01的液滴接触角远小于其他两种情形, 液滴质量(图6(d))仍快速减小, 直至t = 71000完全蒸干, 比Ωlg = 0.003和Ωlg = 0.005的蒸干时间分别快约10%和7%.
液滴铺展、钉扎和去钉扎三个阶段的重要时间参数及角度参数如表3所列. 与增加接触角迟滞影响不同的是, Ωlg增加后, 液滴的θe, θa和θr均减小, 强化液滴在壁面上的润湿效果, 液滴传热也得以加强, 液滴蒸发加快. 接触线开始钉扎和去钉扎时刻延后, 这是由于达到较小的θa和θr需要一定时间. 在3.1节中, 增加Δθ时, θa增大, θr减小, 液滴蒸发同样加快, 因此通过增加接触角迟滞, 亦或提高气-液界面张力对温度的敏感性, 均可以减小后退接触角, 从而实现液滴的快速蒸干. 这一结论与Kulinich和Farzaneh[15]所提出的固着水滴的蒸发行为受润湿滞后(或后退接触角)控制是相符的.
| Ωlg | 钉扎时刻 | 去钉扎时刻 | 蒸干时刻 | θe | θa | θr |
| 0.003 | 18910 | 39750 | 78000 | 0.860 | 0.966 | 0.686 |
| 0.005 | 20280 | 40140 | 76700 | 0.837 | 0.942 | 0.672 |
| 0.01 | 22200 | 40260 | 71000 | 0.775 | 0.880 | 0.610 |
表3不同Ωlg时液滴演化过程中参数变化
Table3.Varieties of parameters during drop evolution with different Ωlg.
接触线开始钉扎和去钉扎时液滴分别达到前进接触角和后退接触角, 随着迟滞角的增加, 前进接触角增大, 后退接触角减小, 且后退接触角减小的幅度大于前进接触角增大的幅度. 通过改变接触角迟滞有利于调控液滴运动, 从而控制蒸发.
与增加接触角迟滞不同的是, 气-液界面张力敏感性系数增加后, 液滴的平衡接触角、前进接触角和后退接触角均减小, 强化了液滴在壁面上的润湿效果, 液滴传热也得以加强, 液滴蒸发加快. 结合液滴蒸发过程的动态特性, 通过增加接触角迟滞或气-液界面张力对温度的敏感性将减小后退接触角, 进而加快液滴蒸干进程.
