全文HTML
--> --> -->目前许多射线照相诊断工具都基于X射线、中子和质子束. 以软X射线为基础的X射线显微镜是研究生物材料的理想选择. 硬X射线(光子能量大于10 keV)由于其超强的穿透力被用于临床医学诊断疾病、工程和工业检测缺陷. X射线点投影背光成像已被用于高能量密度物质(high energy density materials, HEDM)实验[10], 其空间分辨率约为10 μm[11]. 在SG-II升级激光设备上, 用短脉冲激光驱动的硬X射线进行了双壳内爆实验[12], 但通过X射线获得的图像空间分辨率不及HEER. 短脉冲中子被应用于了解温稠密物质的动态过程[13]. 中子射线照相的优势在于对低原子序数元素的材料具有极高的敏感性[14]. HEDM的材料一般由重金属组成, 中子射线对其不敏感, 且中子与金属之间的反应截面太小, 无法有效地对HEDM成像. 中子成像诊断是NIF进行惯性聚变研究的工具, 但其成像的空间分辨率大于10 μm[15], 大于HEER的空间分辨率. 高能质子射线照相术在诊断HEDM时显示了其优异的性能[16]. 然而在实验室中不容易产生超短脉冲(ps量级)的高能质子束, 而高能电子成像具有高时空分辨率的优势. 由于质子与物质之间的相互作用相对单一, 因此很难反映物质的不同性质. 此外对比高能质子加速器, 高能电子加速器和相应的成像系统造价更低廉.
高能电子三维重建(three-dimensional high energy electron radiography, TDHEER)技术将HEER与三维(three dimensions, 3D)重建算法相结合, TDHEER技术的有效性和可行性已通过静态中尺度样品的模拟实验研究得到证实[17]. 为了通过实验验证该技术, 在本文研究中进行了毫米级样本的重建. 根据Nyquist采样理论, 重建使用的投影数据越少, 则同种算法重建所花费的时间就越少, 但会增加伪影降低图像质量. 重建的目标是在满足重建结果质量的同时, 花费尽可能少的时间. 因此在实验中分别使用了三组不同数目的投影图像集: 180, 36和18, 以及三种不同的重建算法, 包括解析和迭代算法来重建样本. 结果发现, 使用不同的算法及投影集重建的图像质量和重建时间是不同的. 为提高重建图像的质量并且减少重建时间, 有必要选择合适的算法.
 图 1 HEER的布局原理图
图 1 HEER的布局原理图Figure1. Layout and principle of HEER.








电子束与物质相互作用后的角度发散主要由于电子的多重散射, 可由Molière模型描述多库仑散射作用下出射电子的角度分布:




成像透镜系统中存在傅里叶平面, 用于筛除由多库仑散射导致散角过大的电子, 从而提高空间分辨率. 荧光屏是Ce:YAG屏幕, 实现将电信号转换为光信号. 当CCD相机直接对准荧光屏成像时, 由于受到强辐射采集到的图像会有大量噪声. 因此在荧光屏后添加一面反光镜, 变换光路, 使得光线偏转90o后再由相机采集. 3D重建算法包括非迭代和迭代算法, 已广泛应用于医学图像重建[19]、工业CT[20]和其他3D射线照相中. TDHEER类似于电子断层扫描技术, 因此对TDHEER采用电子断层扫描中使用的算法, 即滤波反投影(filtering back projection, FBP)[21]、迭代算法-代数重建技术(algebraic reconstruction technique, ART)[22]和联立代数重建技术(simultaneous algebraic reconstruction technique, SART)[23]来重建二维HEER数据.
采集2D HEER数据的实验原理如图2所示, 沿Z轴传播的高能电子束穿过目标样品的X -Y平面, 经由成像透镜系统聚焦透射电子实现点对点成像, 最终获得X -Y平面2D HEER图像. 将样品放置在旋转平台上, 该平台可以绕Y轴(± 90°)旋转, 每次旋转的角度间隔为1°, 每旋转一次采集一幅2D HEER图像, 通过CCD相机收集了从0°到179°的共计180张图像. 为便于样品制备, 实验样品是手表的1个零件如图3所示, 其尺寸如下: 长度 × 厚度 × 高度为3.34 mm × 0.6 mm × 2.18 mm. 图3(a)和图3(b)分别是样品的正视图和左视图, 以其长度为X轴, 高度为Y轴, 厚度为Z轴, 建立3D坐标系如图3(c)所示. 该实验在兰州高能电子成像实验平台上进行, 实验中使用的电子束参数如下: 束团能量为50 MeV, 能散为0.1%, 归一化发射度约为8.0 mm·mrad, 束团电荷量约为100 pC, 均方根束长约为1.5 ps[24].
 图 2 获取2D HEER数据的实验原理
图 2 获取2D HEER数据的实验原理Figure2. Experimental principle of acquiring 2D HEER data.
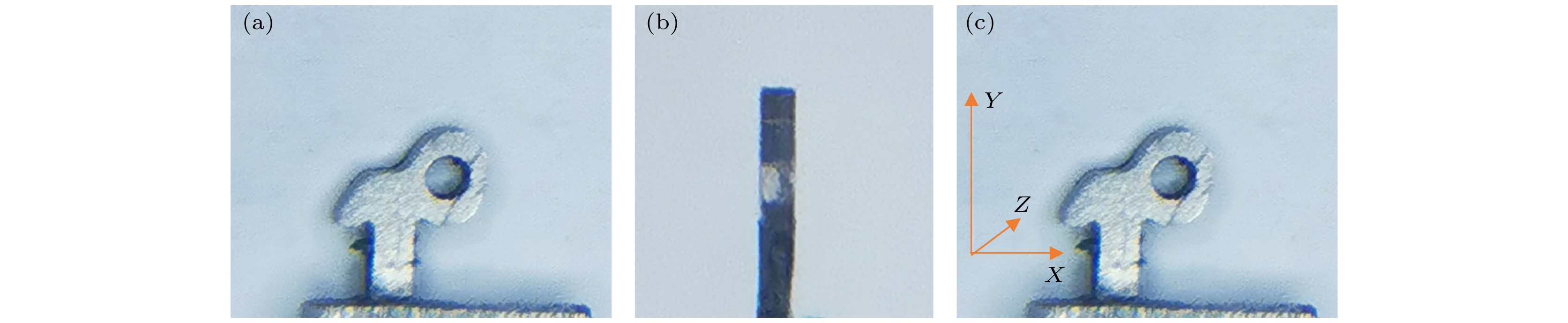 图 3 实验样品 (a) 正视图; (b) 左视图; (c) 3D坐标系
图 3 实验样品 (a) 正视图; (b) 左视图; (c) 3D坐标系Figure3. Experimental sample: (a) The front view; (b) the left view; (c) the 3D coordinate diagram.
3.1.2D HEER图像预处理
在实验中, 使用优化后的四极成像透镜系统来获得2D HEER图像, 其放大倍数为–2.88[5]. 图4展示了样品分别在0°, 45°, 135°和180°旋转角度下拍摄的2D HEER图像. 分析图像发现含有噪声, 其主要来源是CCD的固有噪声以及一些由X射线引起的噪声. 由于在图像采集过程中这些噪声不可避免地引入并影响最终的重建质量, 因此首先分析噪声类别并选择合适的滤波器将其滤除. 经分析得出噪声的主要成分是椒盐噪声, 分别用3种滤波器: 均值滤波器[25]、中值滤波器[26]和小波滤波器[27]进行滤波降噪, 同一图像分别经过3个滤波器处理后的信噪比(signal to noise ratio, SNR)结果分别为19.6165, 19.6411和16.6871. 图像的SNR越高, 图像质量越好, 因此选择中值滤波器来处理图像. 由于重建算法要求投影图像具有相同的长度和宽度, 因此将原始大小为2448 × 2048像素的图像裁剪到仅包含样本的1670 × 1670像素的区域. 此外当图像分辨率相同时, 图像尺寸越小, 重建时间越短, 将尺寸1670 × 1670压缩为167 × 167像素, 以加快重建速度. 最终获得用于重建的180幅2D HEER图像, 其尺寸为167 × 167像素. 图 4 2D HEER图像 (a)?(d) 旋转角度分别为0o, 45o, 135o和 180o
图 4 2D HEER图像 (a)?(d) 旋转角度分别为0o, 45o, 135o和 180oFigure4. 2D HEER images: (a)?(d) Rotation angle is 0o, 45o, 135o, 180o, respectively.
2
3.2.旋转角度间隔1o的三维重建结果
解析重建算法FBP能够克服常规反投影的局限性, 当FBP被应用于180幅2D HEER图像的全角度投影重建时, 其重建结果要优于稀疏角度投影重建[20]. 因此采用由HEER平台收集的样本180幅HEER图像(从0o到179o, 间隔1o)用于三维重建. 最基础的迭代重建算法是ART, 当使用稀疏投影数据时, 诸如ART之类的迭代算法的重建结果要优于FBP[28], 但ART要比FBP花费更多的重建时间. 当使用与ART相同的参数时, 采用SART可获得与ART大致相同的图像质量但其重建时长在FBP和ART之间[29]. 在重建过程中, 调整ART和SART的松弛因子、迭代次数和迭代初始值, 以获得良好的重建结果. FBP, ART和SART算法重建的样品分成X, Y和Z三个方向, 每个方向中共有236个重建切片, 切片大小为6.24 cm × 6.24 cm. 在X方向上重建的从X –到X +的第95, 134和145层的切片如图5所示. 在Y方向上重建的从Y –到Y +的第89, 124和150层的切片如图6所示. 在Z方向上重建的从Z –到Z +的第52, 120和155层的切片如图7所示.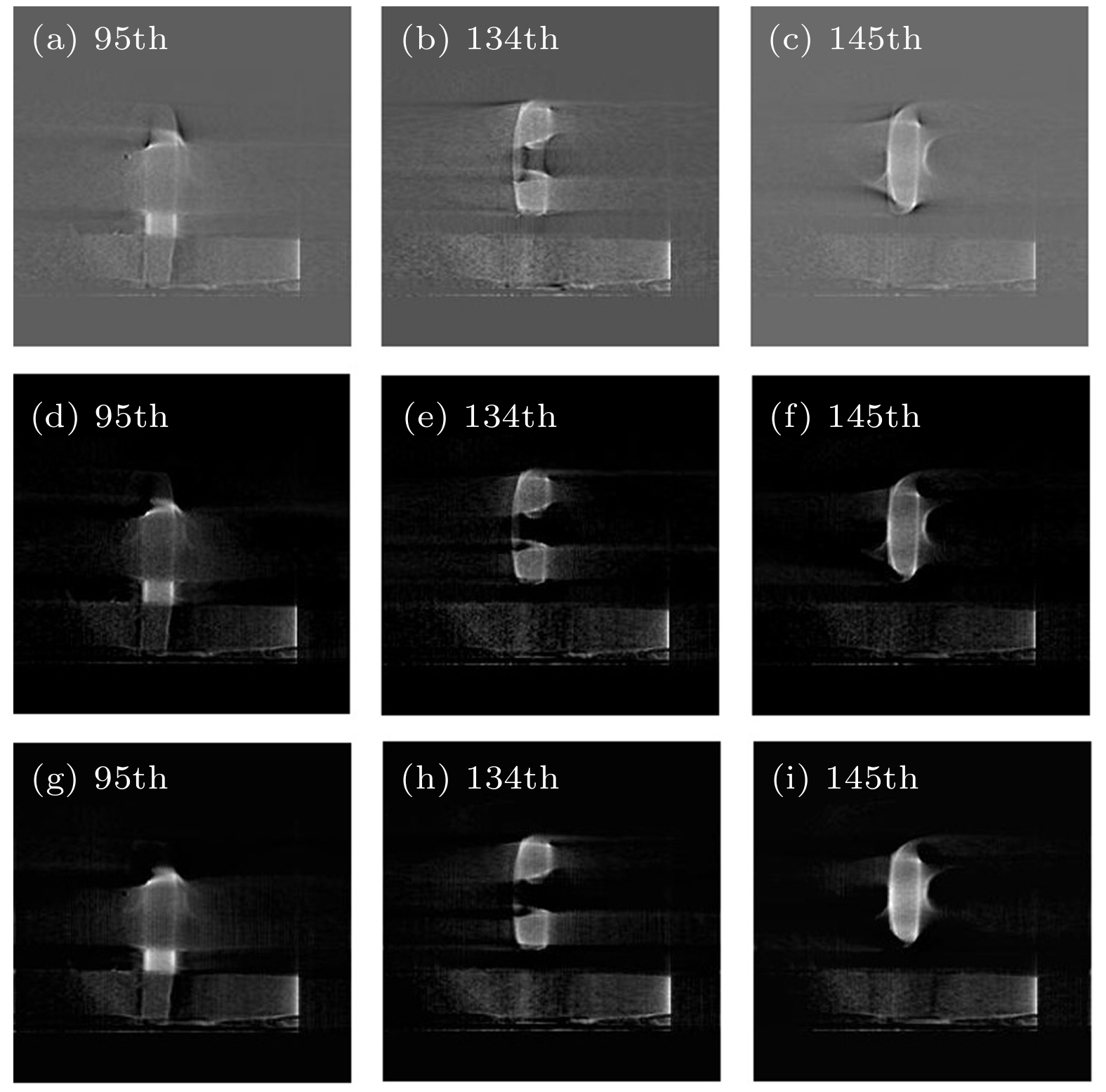 图 5 从X–到X+在第95, 134和145层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART
图 5 从X–到X+在第95, 134和145层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SARTFigure5. Results of reconstructed slices with different algorithms, at the 95th, 134th and 145th layers from X– to X+: (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART.
 图 6 在Y–到Y+的第89, 124和150层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART
图 6 在Y–到Y+的第89, 124和150层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SARTFigure6. Results of reconstructed slices with different algorithms, at the 89th, 124th and 150th layers from Y– to Y+: (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART.
 图 7 从Z–到Z+在第52, 122和155层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART
图 7 从Z–到Z+在第52, 122和155层使用不同算法重建的切片的结果 (a)?(c) FBP; (d)?(f) ART; (g)?(i) SARTFigure7. Results of reconstructed slices with different algorithms, at the 52nd, 122th and 155th layers from Z– to Z+: (a)?(c) FBP; (d)?(f) ART; (g)?(i) SART.
根据图5—7中的重建图像可知, 三种算法FBP, ART和SART都可用于高能电子三维成像. 与ART和SART相比, FBP的重建结果可以显示更多细节, 但存在一些伪影. 分析FBP, ART和SART重建的Y方向上的第124层切片中第151列的像素灰度分布图, 如图8(b)所示, 即图8(a)中红线位置的像素灰度分布. 根据曲线走势分布表明, ART和SART算法重建的图像是等效的.
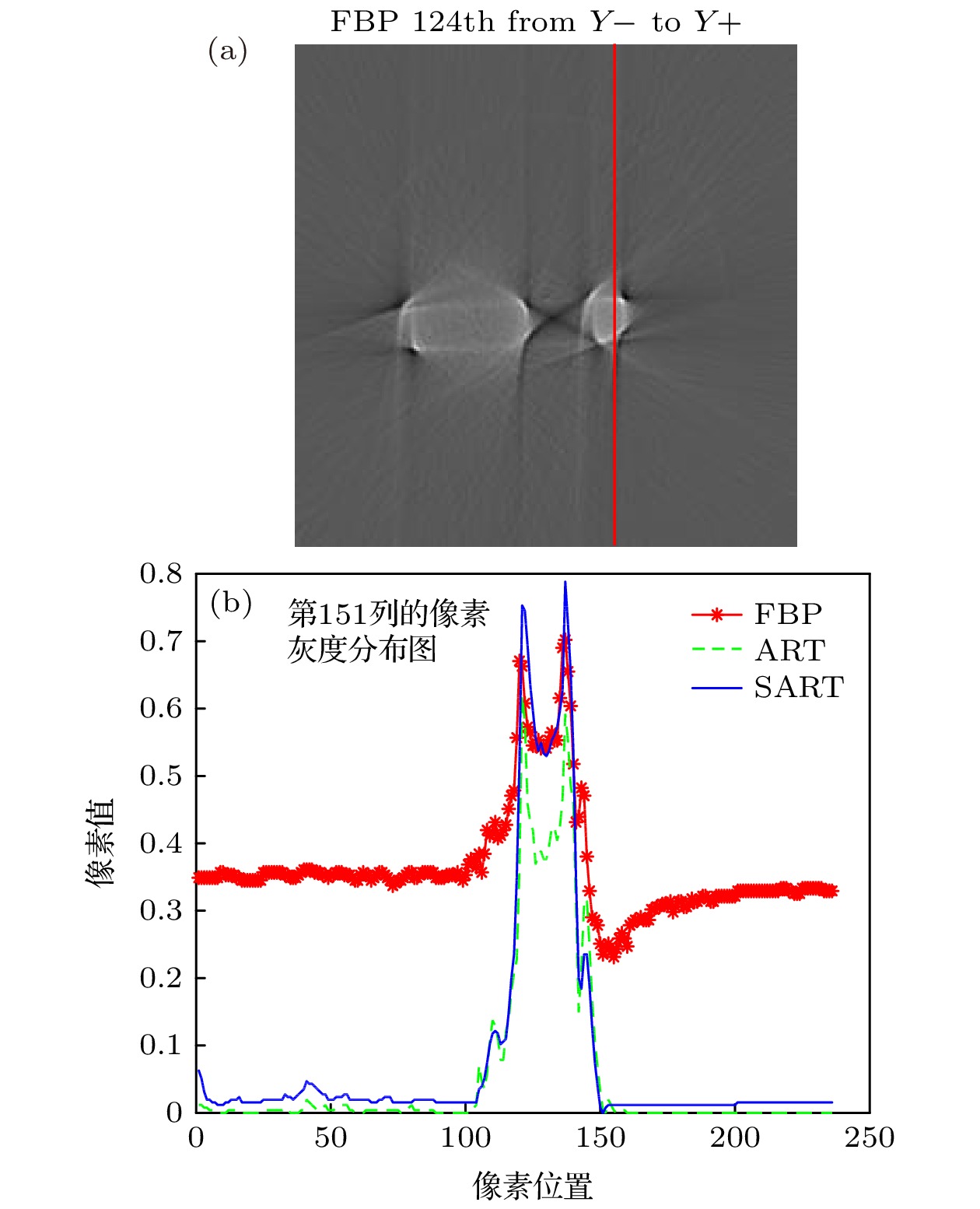 图 8 (a) FBP重建的从Y–到Y +第124个切片图像; (b) 是(a)中红线的像素灰度分布图
图 8 (a) FBP重建的从Y–到Y +第124个切片图像; (b) 是(a)中红线的像素灰度分布图Figure8. (a) The 124th slice image from Y– to Y+ reconstructed by FBP; (b) the pixels grayscale of the red line of panel (a).
2
3.3.旋转角度间隔5o的3D重建结果
为了减少噪声影响、2D HEER数据采集时间及加快重建速度, 使用从0°到179°间隔5o的共36张2D HEER图像数据集来重建. 由于36张2D HEER图像无法满足Nyquist采样理论, 使用解析算法FBP会产生影响图像质量的伪影. 与解析类算法(假定采集位置连续)相比, 基于ART的方法都是非统计性的, 能更好地对采集过程的几何模型进行建模. 因此基于ART的方法可以更好地处理稀疏数据和采样位置不规则的采样. 为了定量分析ART和SART的结果, 以180张图像重建的FBP结果作为基准, 使用两个评价指标作为参考.归一化均方距离准则d :



 图 9 Y–到Y+的第100层和第127层使用不同的算法得出的结果 (a), (b) ART; (c), (d) SART
图 9 Y–到Y+的第100层和第127层使用不同的算法得出的结果 (a), (b) ART; (c), (d) SARTFigure9. Reconstructed slices results with different algorithms, at the 100th and 127th layers from Y– to Y+: (a), (b) ART; (c), (d) SART.
分析表1数据, 当重建同一张图片时, SART算法重建的图像的d和r值小于ART重建的图像的d和r值, 即SART算法重建的图像更接近原始图像. 将图6与图9进行比较, 由于使用较少的2D HEER图像数量, 所以图9中的伪影更加严重.
| 切片位置 | 重建算法 | d | r |
| Y 100th | ART | 11.0736 | 0.8820 |
| SART | 10.9060 | 0.8672 | |
| Y 127th | ART | 9.0947 | 0.9076 |
| SART | 8.9520 | 0.8933 |
表1ART, SART重建切片的d和r值
Table1.Value of d and r of the image reconstructed by ART and SART.
为了在获得高质量图像的同时尽可能缩短整个重建过程, 因此测试了旋转间隔为10°的2D HEER数据集. 不同算法重建的Y轴的第127个切片的结果如图10所示, 图10(a)和图10(b)分别是ART和SART算法的结果, 图10(a)与图10(b)相似, 尽管使用不同的重建算法两者都具有许多伪影, 但此时SART算法的重建时间更短. 图10(c)对比了同种算法重建不同投影子集时图像的像素灰度分布, 与5°间隔的投影数据集相比, 10°间隔的投影数据集重建的图像具有更多的伪影. 这与重建中使用的2D HEER数据越少, 重建图像质量越差的规则相符. 因此, 将SART算法与间隔5°的2D HEER数据相结合更有利于本实验数据的重建, 在获得高质量的重建图像的同时花费更少的时间.
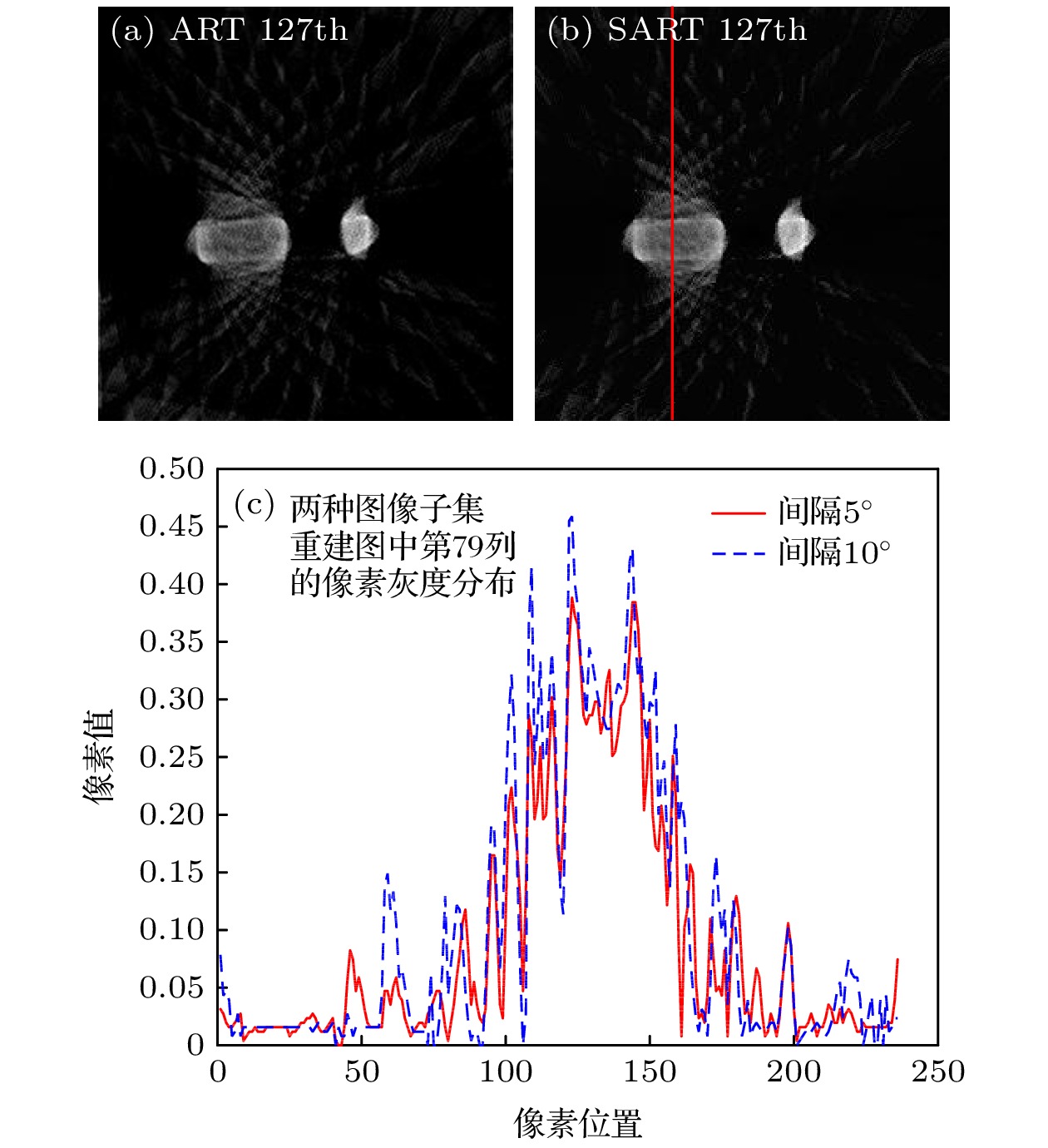 图 10 从Y–到Y +在第127层重建切片的结果 (a) ART; (b) SART; (c) 是(b)中红线的像素灰度分布
图 10 从Y–到Y +在第127层重建切片的结果 (a) ART; (b) SART; (c) 是(b)中红线的像素灰度分布Figure10. Results of reconstructed slices at the 127th layer from Y– to Y+: (a) ART; (b) SART; (c) the pixels grayscale of the red line of panel (b).
感谢兰州大学李公平教授和张催博士在三维重建算法方面提供的帮助.
