Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61805188), the China Postdoctoral Science Foundation (Grant No. 2019M653547), the National Natural Science Foundation of Shaanxi Province, China (Grant No. 2019JQ-121), and the Fundamental Research Funds for the Central Universities, China (Grant No. JB180505)
Received Date:07 April 2021
Accepted Date:27 April 2021
Available Online:07 June 2021
Published Online:05 September 2021
Abstract: Phase shifting profilometry (PSP) is an effective technique to reconstruct the three-dimensional shape of object. In general, PSP needs three or more fringe patterns with phase-shifting accurately known to extract the phase distribution of objects. Therefore, the scene and the test objects should remain stationary during capturing the fringe patterns. However, the phase shifts may be unknown in an actual PSP measurement system, especially when measuring the moving object, that is, the phase-shift error may be introduced during the obtaining of the phase-shifting fringe patterns of moving object. In the dynamic measurement scenario, the use of fewer fringe patterns can realize the faster measurement speed and suppress the phase shift error introduced by the moving object. In this paper, a two-step PSP algorithm is proposed based on Lissajous ellipse fitting (LEF). The proposed method uses only two fringe patterns to extract the phase distribution of the object and can suppress the phase shift error caused by the moving object. However, in a practical PSP system, the spatiotemporally varying background intensity and modulation also significantly affect the phase accuracy extracted by LEF, and thus three error-suppressing methods are proposed to reduce the phase error caused by the non-uniform background intensity and modulation. In order to verify the effectiveness of the three error-suppressing methods, we analyze and compare their performances of error suppression under different background intensities and modulations. The advantages of three error-suppressing methods can be summarized as follows. 1) The mean and modulation correction technique has greater advantage than the other two when the background intensity and modulation vary with time. 2) When the background intensity and modulation are relevant to pixel position and the number of fringe patterns, the empirical mode decomposition normalization can more effectively suppress the influence of the non-uniform background intensity and modulation. In experiment, a two-step phase-shifting dynamic measurement based on LEF is conducted. Compared with the traditional PSP which needs at least three fringe patterns, the two-step PSP algorithm successfully extracts the phase with only two fringe patterns and suppresses the phase shift error caused by the motion of the object. Compared with Fourier transform profilometry (FTP), the two-step PSP algorithm can obtain very accurate phase distribution and retain many phase details. Keywords:fringe projection technology/ phase reconstruction/ phase shifting profilometry/ phase shift error
图6、图7、表1和表2分别为基于归一化LEF的2步PSP重建的相位、相位误差、RMS相位误差以及相移误差值, N表示三种仿真情况的指数. 由于三种情况下归一化的LEF重建的相位相似, 为了简化, 故图6仅仅展示了第一种仿真情况下的相位结果. 图 6 仿真1下基归一化LEF的两步PSP测量相位分布 Figure6. Phase distribution of two-step PSP based on the normalized LEF in simulation condition 1.
图 7 不同情况下基于归一化LEF的2步PSP测量相位误差 Figure7. Phase error results of 2-step PSP based on the normalized LEF under different conditions.
N
1
2
3
高斯滤波归一化/rad
0.0022
0.0729
0.0624
EMD归一化/rad
0.0216
0.0319
0.0608
均值和调制度矫正归一化/rad
0.0013
0.0805
0.0847
表1不同情况下基于LEF的两步PSP方法计算的相位误差均方根 Table1.Root mean square of phase error calculated by two-step PSP based on the normalized LEF under different conditions.
N
1
2
3
高斯滤波归一化/rad
0
0.0125
0.0117
EMD归一化/rad
0.0017
0.0039
0.0108
均值和调制度矫正归一化/rad
0
0.0183
0.0206
表2不同情况下基于LEF的两步PSP方法计算的相移误差均方根 Table2.Root mean square of phase-shifting error calculated by two-step PSP based on the normalized LEF under different conditions.
从仿真结果可以看出, 对于仿真1, 即当背景强度和调制度仅随条纹帧数变化时, 高斯滤波归一化、均值和调制度矫正方法能够很好地抑制背景强度和调制度对LEF相位的影响, 在此基础上, LEF计算的相移值等于预设值($\pi /3$), 而EMD归一化方法在该情况下的抑制背景强度和调制度性能较弱. 对于仿真2和3, 当背景和调制度随时间和空间变化时, EMD归一化方法抑制背景强度和调制度性能最优, 由表1和表2可以看出, 基于EMD归一化的LEF算法计算的RMS相位误差和相移误差也最小, 而基于均值和调制度矫正的LEF算法产生了严重的相位和相移误差. 为了更有效地验证本文方法的有效性, 在两帧条纹图中添加27 dB的随机噪声, 对三步相移算法、傅里叶变换轮廓术(Fourier transform profilometry, FTP)和基于EMD归一化的LEF方法进行了仿真测量, 如图8所示, 第一和第二行表示三种方法的计算相位分布和相位误差. 三步相移算法、FTP和基于EMD归一化的LEF方法计算的RMS相位误差值分别为0.0546, 0.0735和0.0608 rad, 由仿真结果可以看出, 基于EMD归一化的LEF算法的测量精度高于FTP方法; 与3步相移方法相比, 基于EMD归一化的LEF计算的相位误差RMS值较大, 但是本文所述方法减少了PSP的条纹帧数, 更有助于快速三维测量. 图 8 随机噪声条件下3步相移方法、FTP和基于归一化LEF的两步PSP的测量结果 Figure8. Measurement results of 3-step phase shift method, FTP and 2-step PSP based on the normalized LEF under random noise.
4.实验结果与分析24.1.基于归一化LEF的两步PSP静态场景测试实验结果 -->
4.1.基于归一化LEF的两步PSP静态场景测试实验结果
为了验证所述方法的有效性, 进行了实验分析, 实验系统中投影仪采用型号EPSON CB-X05, 其分辨率为1204 $ \times $ 768; CCD相机采用了MERCURY, 分辨率为1628 $ \times $ 1236; 待测物体是具有一定细节信息的心形物体如图9(a)所示, 图9(b)为相机获得的条纹图, 采用十步相移方法重建的相位如图9(c)所示, 图9(d)为图9(c)中红色矩形框内的细节相位分布, 并将十步相移方法计算的相位作为参考相位. 图 9 十步相移方法的测量结果 (a) 待测物体; (b) 物体的条纹图; (c) 十步相移方法提取的相位分步; (d) 图(c)中红色方框内的相位细节 Figure9. Measurement results of ten-step phase shifting method: (a) Test object; (b) fringe pattern of the test object; (c) the reference phase distribution based on ten-step phase-shifting method; (d) the enlarged phase details in red rectangular of Fig. (c).
图10(a)—(c)分别为傅里叶变换轮廓术(Fourier transform profilometry, FTP)提取的相位分布、相位误差(FTP与十步相移方法计算相位的差值)和图10(a)中红色矩形框内部的相位细节分布, 其中, 由图10(b)计算的RMS相位误差值为0.0732 rad. 比较图10(c)与图9(d), 可以看出FTP重建的细节相位非常模糊, 其保留相位细节的性能比较差. 图 10 FTP的测量结果 (a) 相位分布; (b) 相位误差; (c) 图(a)中红色框内的相位细节 Figure10. Measurement results of FTP: (a) Phase distribution; (b) phase error distribution; (c) the enlarged phase details in red rectangular of Fig. (a).
图11为应用高斯滤波归一化、EMD归一化、均值和对比度矫正算法抑制了背景和调制度的影响后, 采用LEF技术计算的相位分布和相位误差(计算的相位与十步相移算法计算的相位的差值). 从图11中可以看出, 由基于均值和调制度矫正的LEF算法提取的相位非常不光滑, 因为均值和调制度矫正方法的优势主要体现在对于随时间变化的背景和调制度的矫正效果, 但实际PSP系统中, 背景和调制度是随时间和空间变化的. 实验结果也验证了EMD归一化可以更有效地抑制不均匀的背景强度和调制度, 所以, 基于EMD归一化的LEF算法重建的相位分布更光滑, 计算的相位误差也最小. 利用高斯滤波、EMD与均值和对比度矫正方法去除背景和调制度的影响后, LEF方法计算的RMS相位误差值分别为0.0648, 0.0597和0.1024 rad. 另外, 应用高斯滤波、均值和对比度矫正方法两种方法抑制不均匀的背景和调制度后, LEF重建的相位细节有部分丢失, 而基于EMD归一化的LEF算法保留了更多的相位细节. 图 11 基于高斯滤波归一化、EMD归一化、均值和对比度矫正的LEF方法重建结果 Figure11. Reconstructed results of LEF method based on Gaussian filter normalization, EMD normalization, mean and contrast correction.

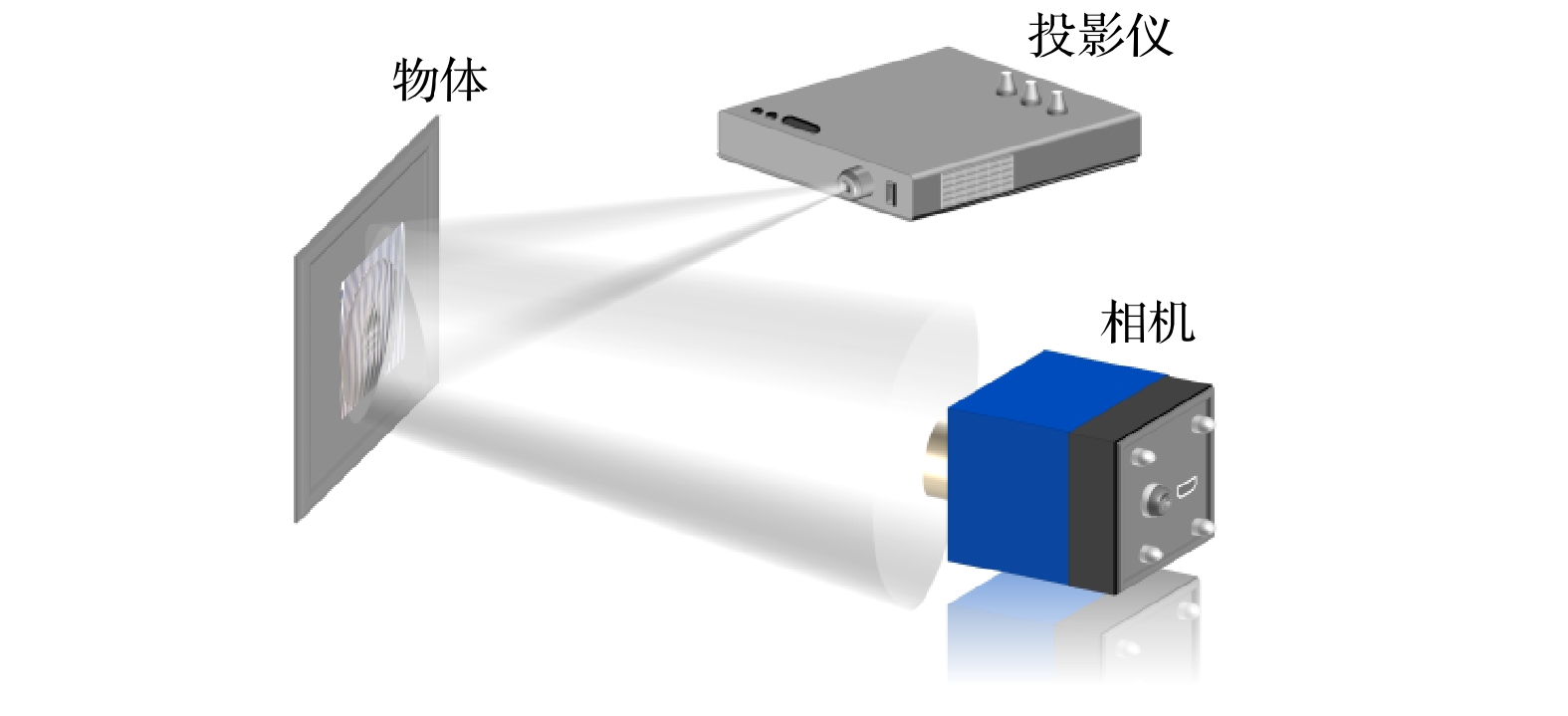 图 1 PSP测量系统原理
图 1 PSP测量系统原理





























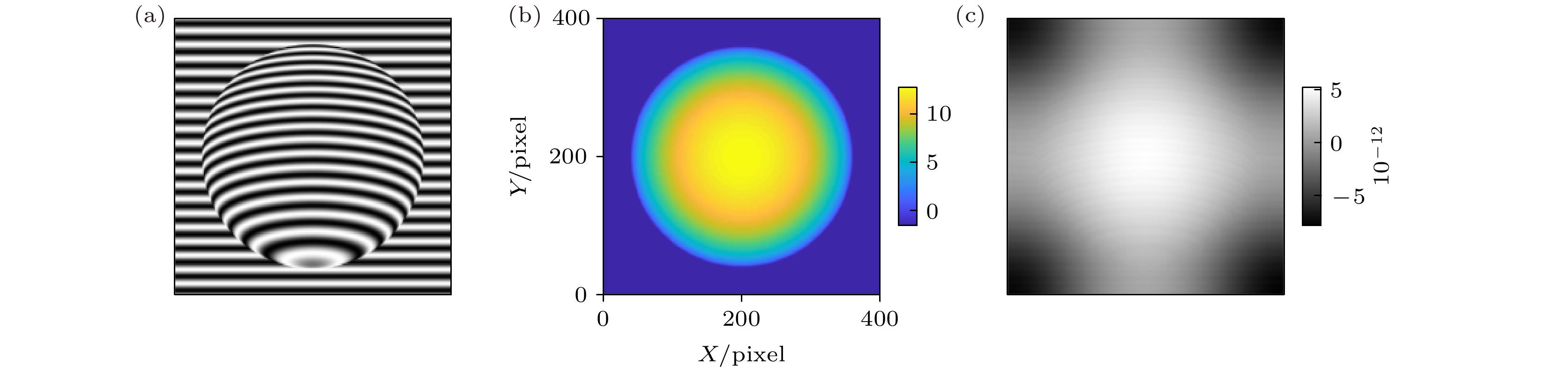 图 2 均匀背景强度和调制度下LEF方法的仿真结果 (a) 条纹图; (b) 相位分布; (c) 相位误差
图 2 均匀背景强度和调制度下LEF方法的仿真结果 (a) 条纹图; (b) 相位分布; (c) 相位误差












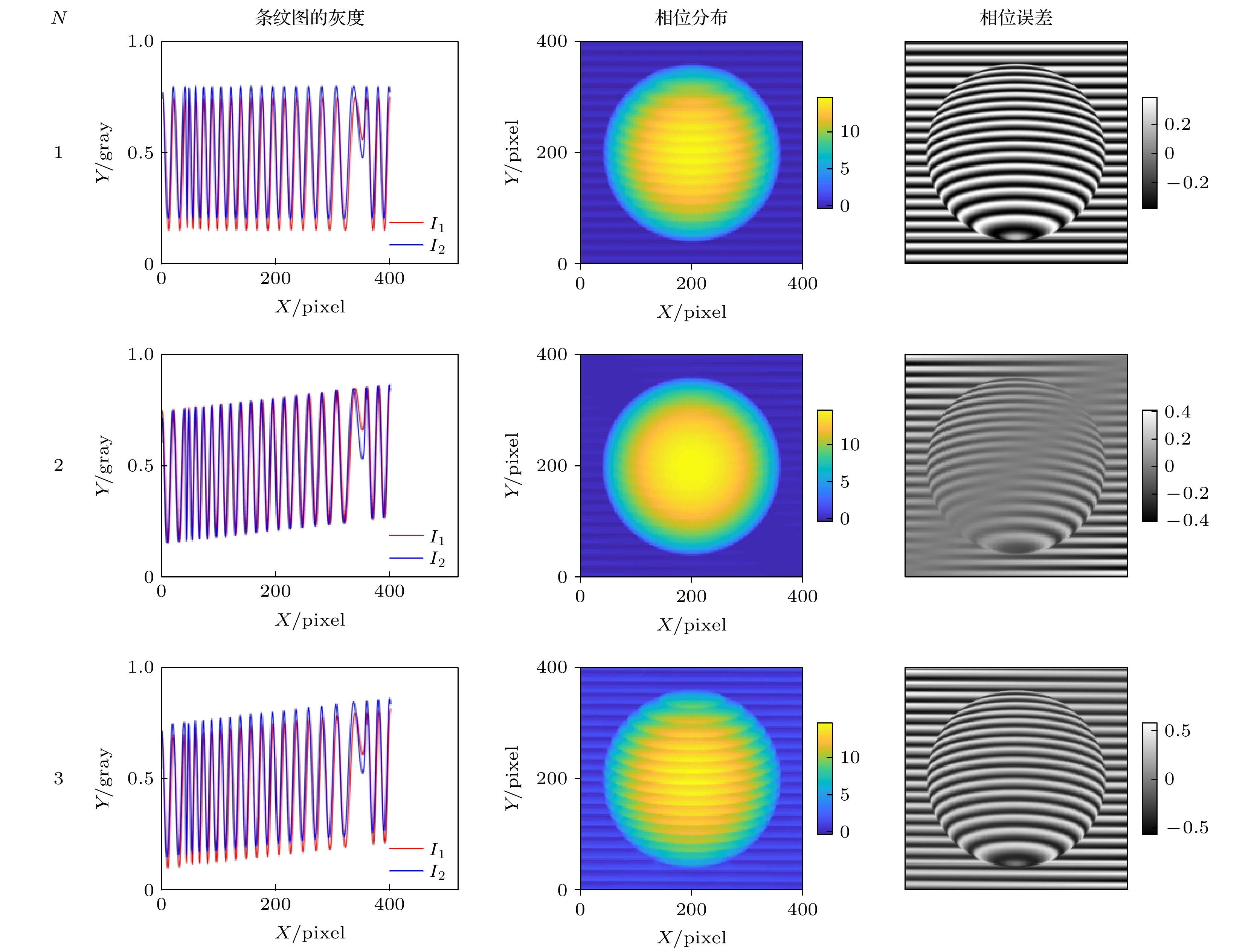 图 3 不同背景强度下LEF方法的仿真结果
图 3 不同背景强度下LEF方法的仿真结果














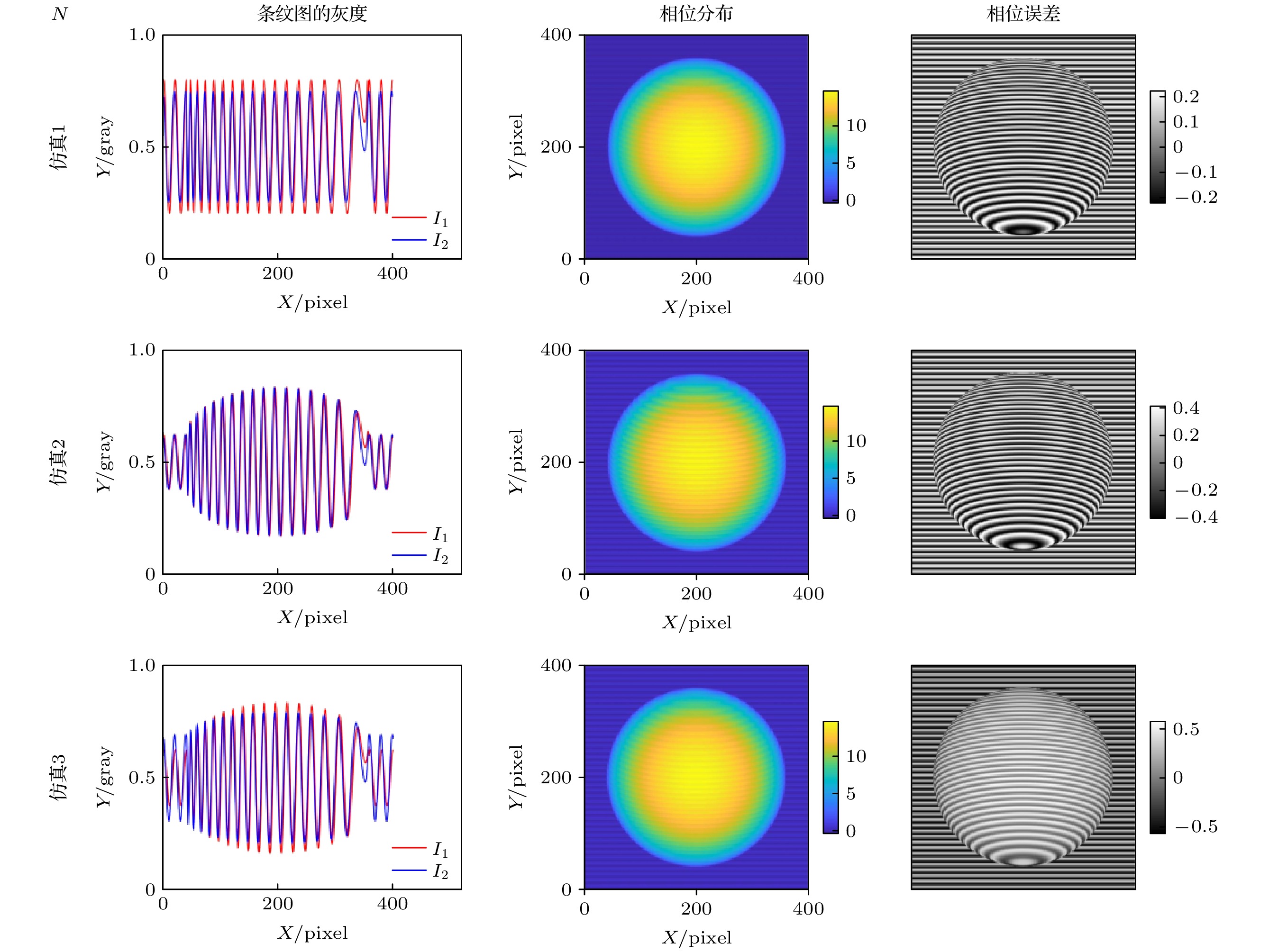 图 4 不同调制度下LEF方法的仿真结果
图 4 不同调制度下LEF方法的仿真结果













































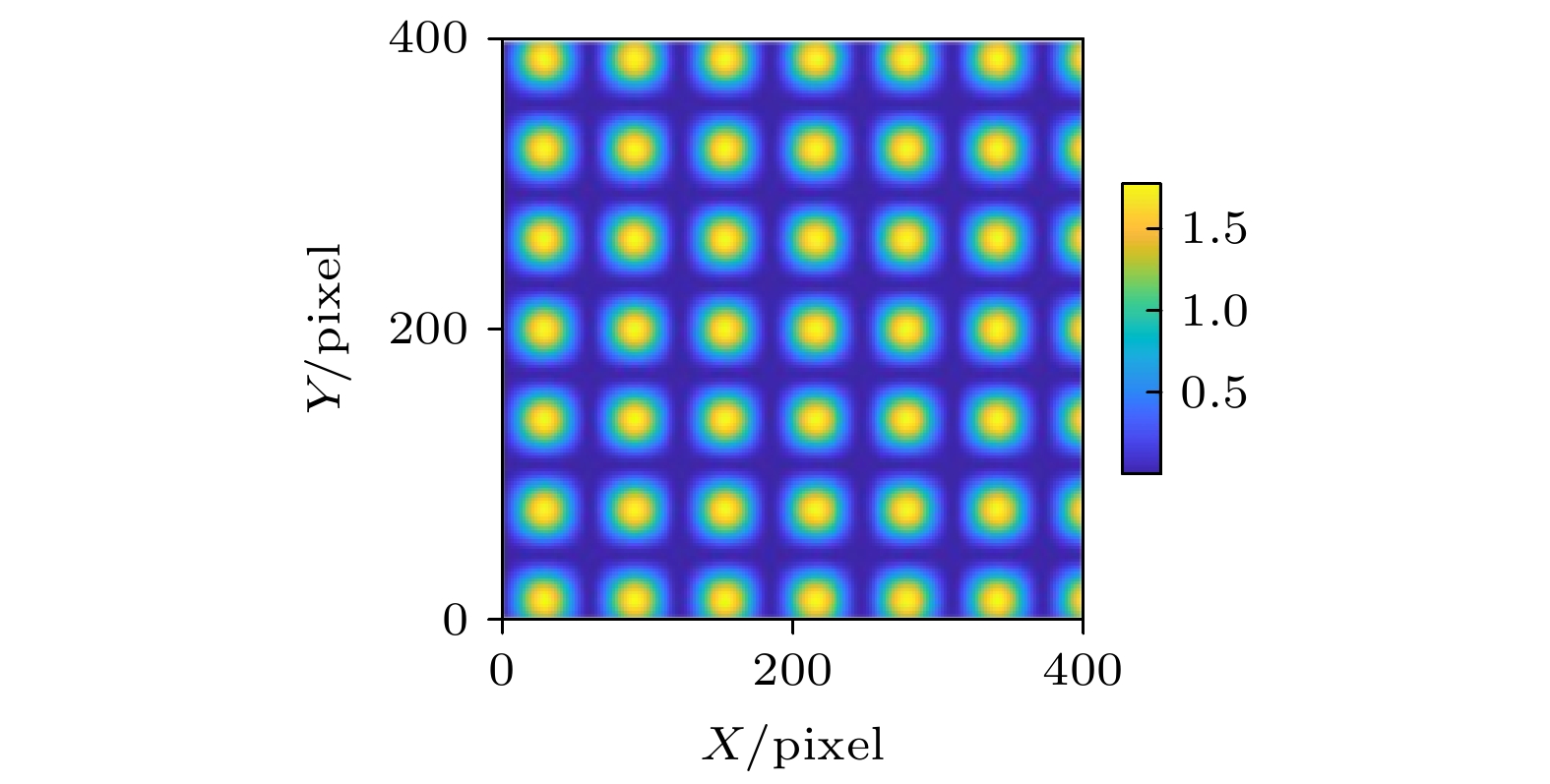 图 5 参考相位
图 5 参考相位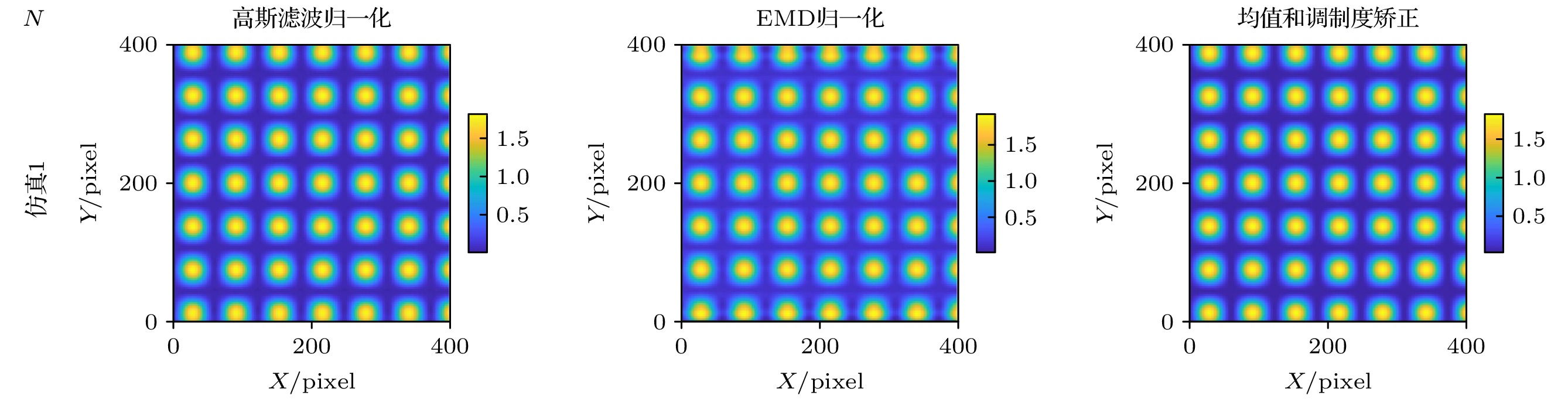 图 6 仿真1下基归一化LEF的两步PSP测量相位分布
图 6 仿真1下基归一化LEF的两步PSP测量相位分布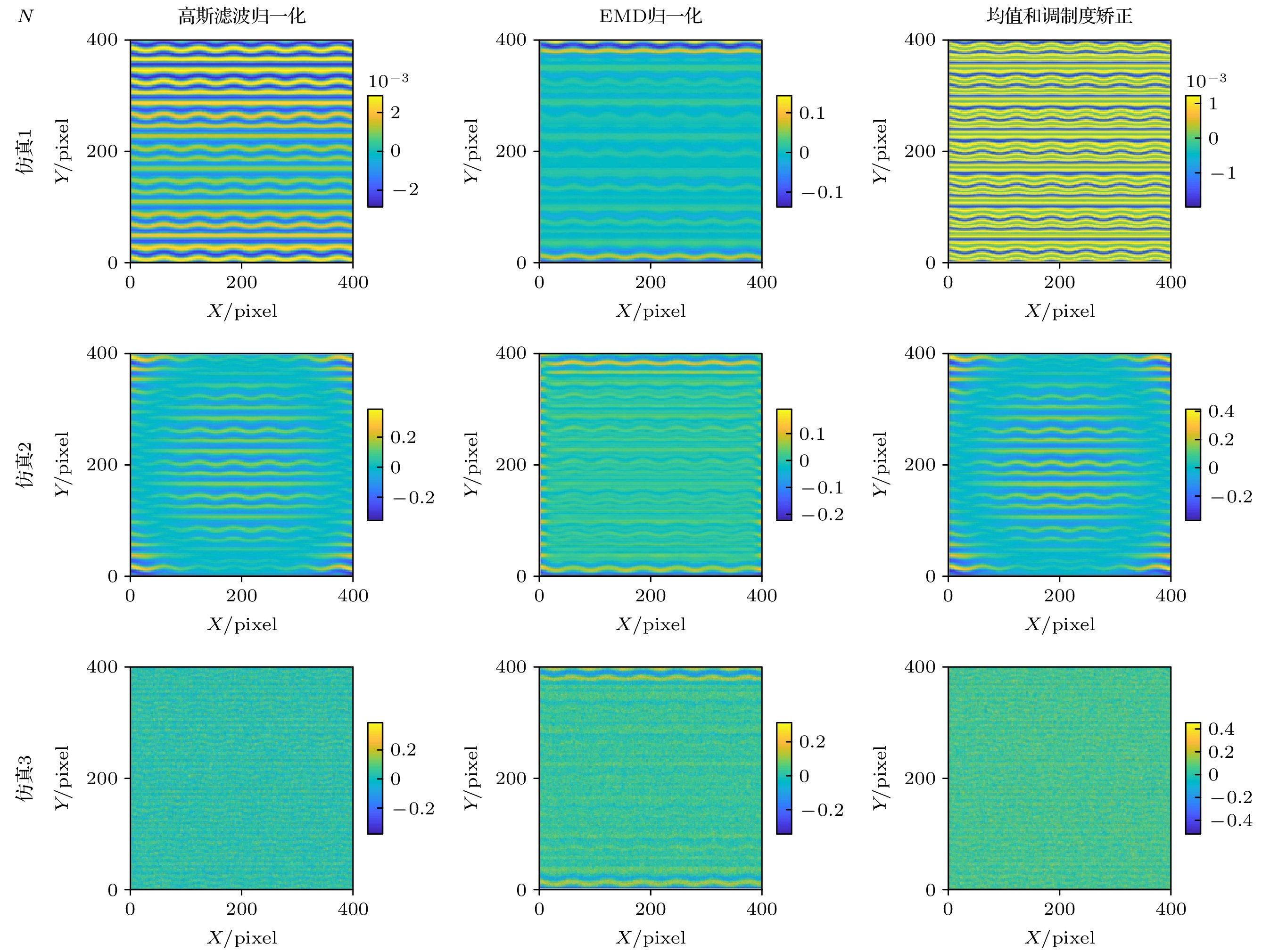 图 7 不同情况下基于归一化LEF的2步PSP测量相位误差
图 7 不同情况下基于归一化LEF的2步PSP测量相位误差
 图 8 随机噪声条件下3步相移方法、FTP和基于归一化LEF的两步PSP的测量结果
图 8 随机噪声条件下3步相移方法、FTP和基于归一化LEF的两步PSP的测量结果

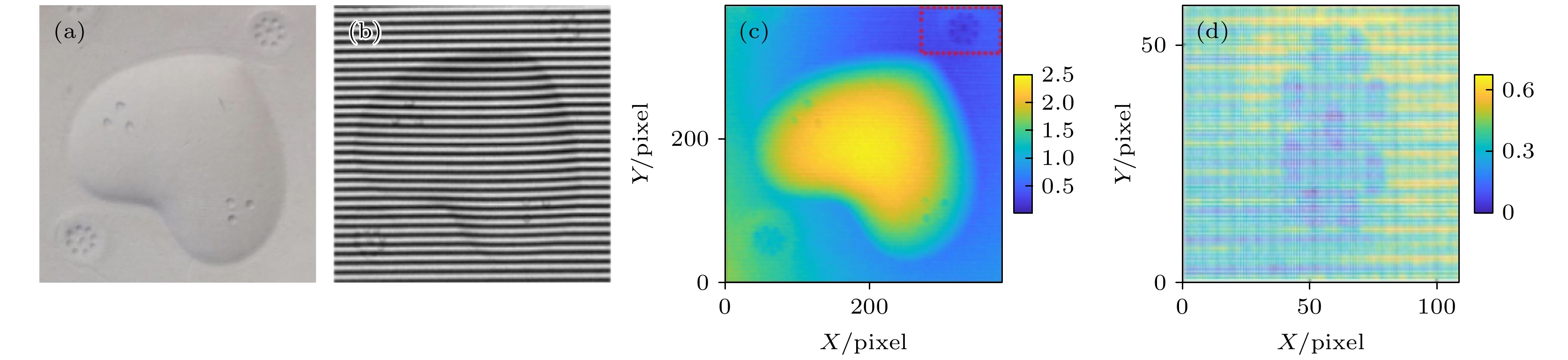 图 9 十步相移方法的测量结果 (a) 待测物体; (b) 物体的条纹图; (c) 十步相移方法提取的相位分步; (d) 图(c)中红色方框内的相位细节
图 9 十步相移方法的测量结果 (a) 待测物体; (b) 物体的条纹图; (c) 十步相移方法提取的相位分步; (d) 图(c)中红色方框内的相位细节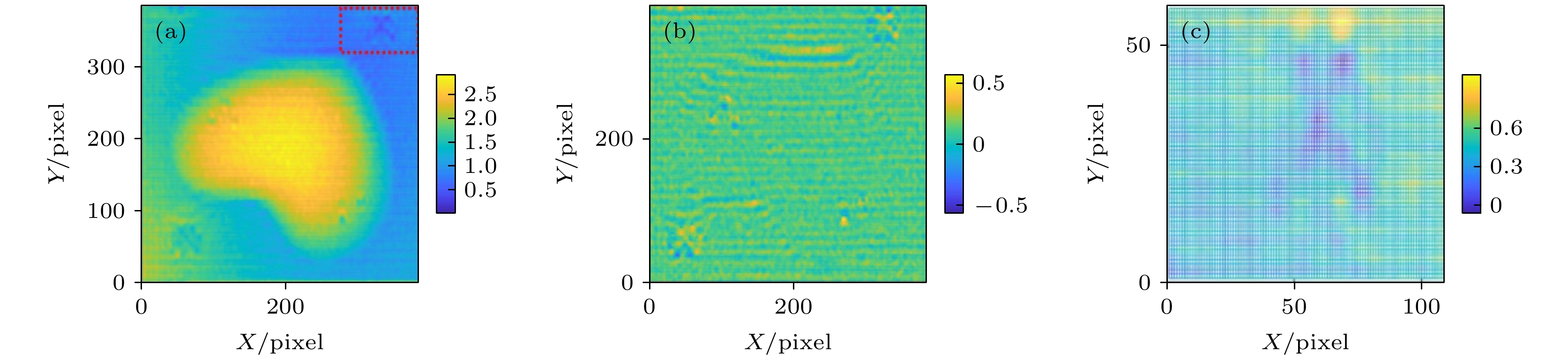 图 10 FTP的测量结果 (a) 相位分布; (b) 相位误差; (c) 图(a)中红色框内的相位细节
图 10 FTP的测量结果 (a) 相位分布; (b) 相位误差; (c) 图(a)中红色框内的相位细节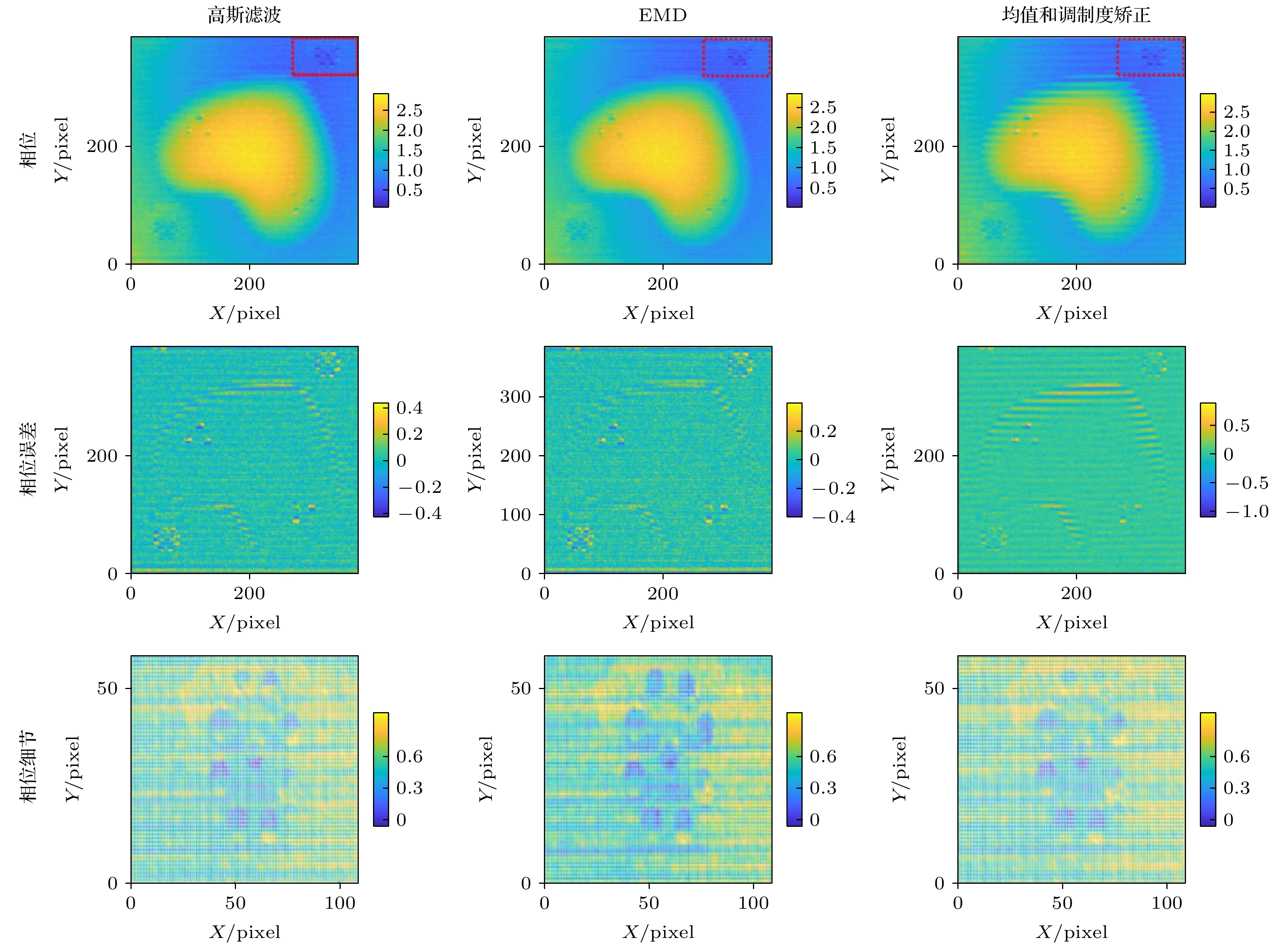 图 11 基于高斯滤波归一化、EMD归一化、均值和对比度矫正的LEF方法重建结果
图 11 基于高斯滤波归一化、EMD归一化、均值和对比度矫正的LEF方法重建结果


 图 12 运动物体的实验结果 (a) 三步相移方法提取的相位; (b) 基于高斯滤波归一化的两步PSP重建的相位; (c) 基于EMD归一化的两步PSP重建相位; (d) 基于均值和调制度矫正的两步PSP重建相位
图 12 运动物体的实验结果 (a) 三步相移方法提取的相位; (b) 基于高斯滤波归一化的两步PSP重建的相位; (c) 基于EMD归一化的两步PSP重建相位; (d) 基于均值和调制度矫正的两步PSP重建相位