1.School of Physics and Optoelectronic Engineering, Xidian University, Xi’an 710071, China 2.Xi’an Key Laboratory of Computational Imaging, Xidian University, Xi’an 710071, China 3.Key Laboratory of Optical Engineering, Institute of Optics and Electronics, Chinese Academic of Science, Chengdu 610209, China 4.Academic of Advanced Interdisciplinary Research, Xidian University, Xi’an 710071, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 62075175, 62005203), and the Foundation of the Key Laboratory of Optical Engineering, Chinese Academic of Sciences (Grant No. QC20191097)
Received Date:10 February 2021
Accepted Date:17 April 2021
Available Online:07 June 2021
Published Online:20 August 2021
Abstract:Underwater imaging plays a critical role in marine rescue, seabed resource exploration, underwater archaeology, etc. by providing human-vision-system-friendly information. A variety of approaches have been exploited to realize clear underwater imaging. Noticeably, underwater polarization imaging has attracted attention due to its simple imaging system and clear vision. It can remove the backscattered light from degraded image and recover abundant high-fidelity information of target. Descattering is conducted by using the difference in polarization characteristics between the target and background. A classical underwater polarization imaging method is presented by Schechner [Tali T, Schechner Y Y 2009 IEEE Trans. Pattern Anal. Mach. Intell.31 385], in which the differential polarization characteristics of backscattered light and target light are used to recover clear image. More researches were conducted including Huang et al.’s research [Huang B J, Liu T G, Hu H F, et al. 2016 Optics Express24 9826], Liu et al.’s study [Liu F, Han P L, Wei Y, et al. 2018 Opt. Lett.43 4903], etc.However, in the polarization imaging methods, the uniform underwater backscattered light and polarization parameters over the whole image are usually assumed. In most practical applications, these assumptions cannot hold true. Therefore, the inaccurate estimation of backscattered light makes it difficult to completely descatter an image, leading many methods to fail to detect the target in non-uniform turbid water.In this study, we propose a low-rank-and-sparse-decomposition-based polarization imaging combined with common mode rejection feature of polarization information in scattered light field to eliminate non-uniformity and scattering caused by severe scattering during active polarization imaging of turbid water. The backscattered light is highly reduced and the information contained in background is single and highly correlated. It conforms to the low-rank characteristics of the image. What is more, the target in underwater scene occupies a relatively small proportion, which conforms to the sparsity characteristics of the image. Therefore, combining the low-rank characteristics of backscattered light with the sparse characteristics of target information light, we separate them through low-rank and sparse matrix decomposition to recover clear underwater image. Both experimental and objective image quality evaluation results demonstrate the validity of the proposed method.The proposed method works well in improving polarization vision in non-uniform turbid water, which is due to its ability to make the underwater scene uniform and the target and background information separated through their distribution difference of polarization characteristics. It possesses potential applications in turbid water imaging. Keywords:underwater imaging/ polarization characteristic/ common-mode rejection/ scattering

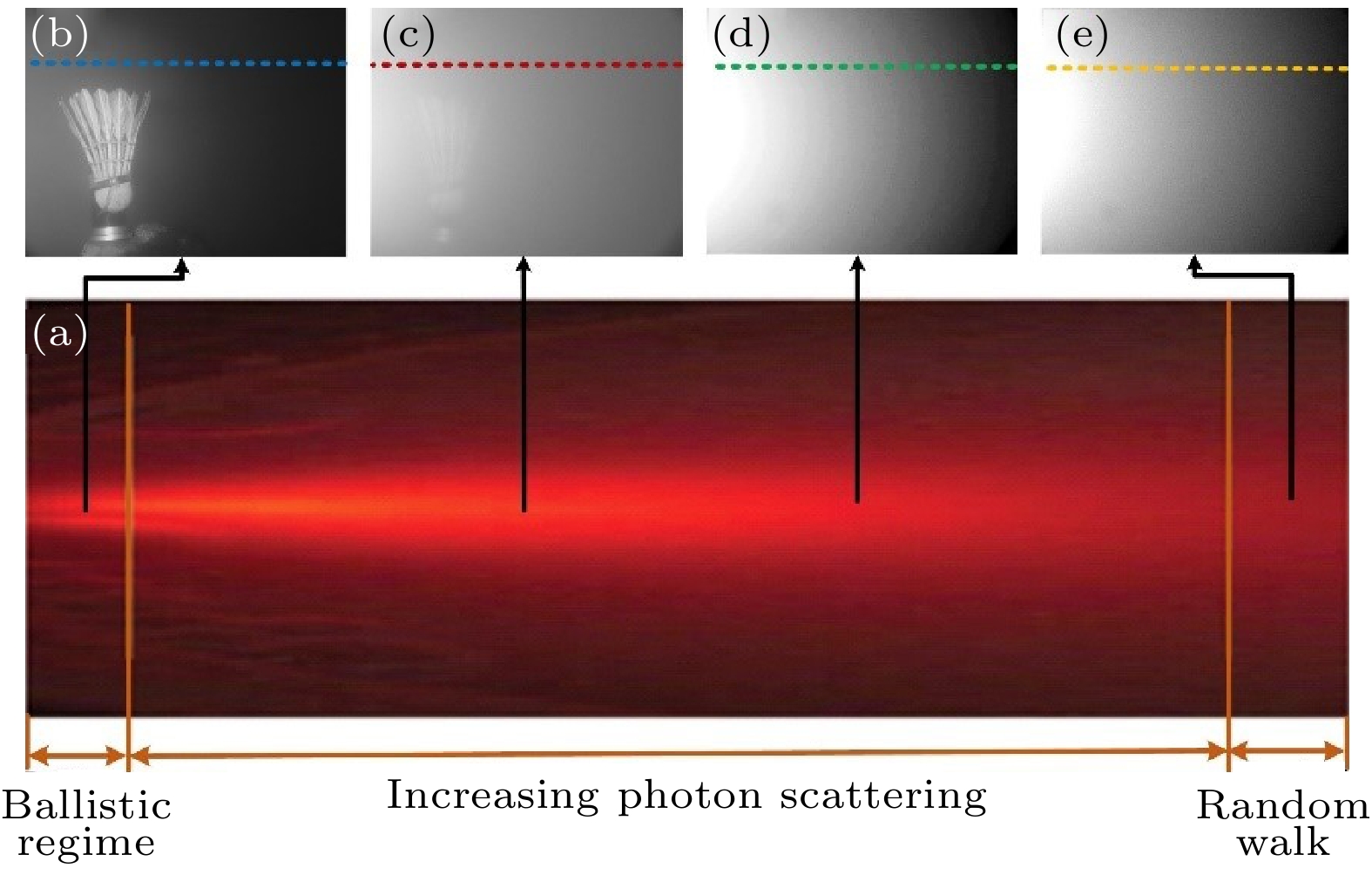 图 1 浑浊水体散射光场特性分析
图 1 浑浊水体散射光场特性分析







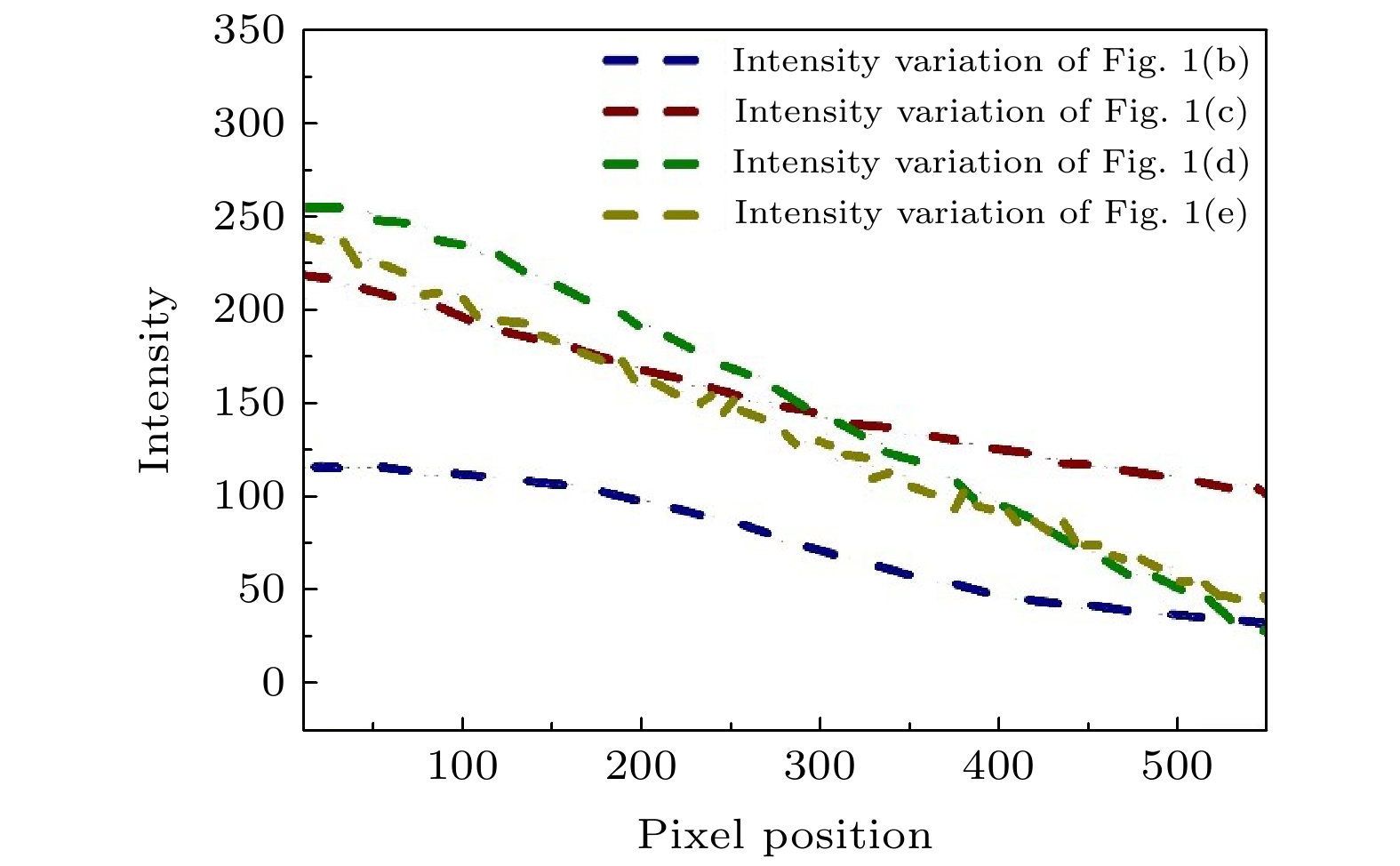 图 2 不同散射程度的强度变化曲线
图 2 不同散射程度的强度变化曲线










































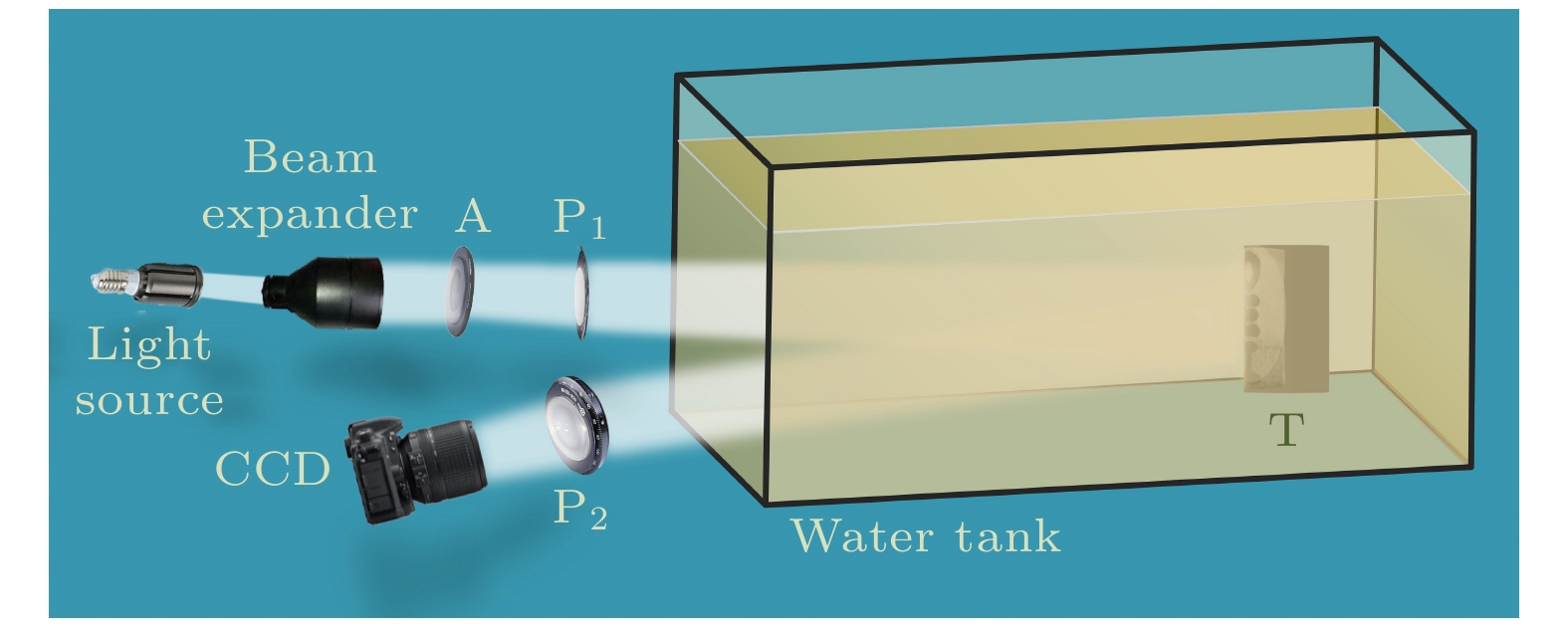 图 3 水下偏振成像原理图
图 3 水下偏振成像原理图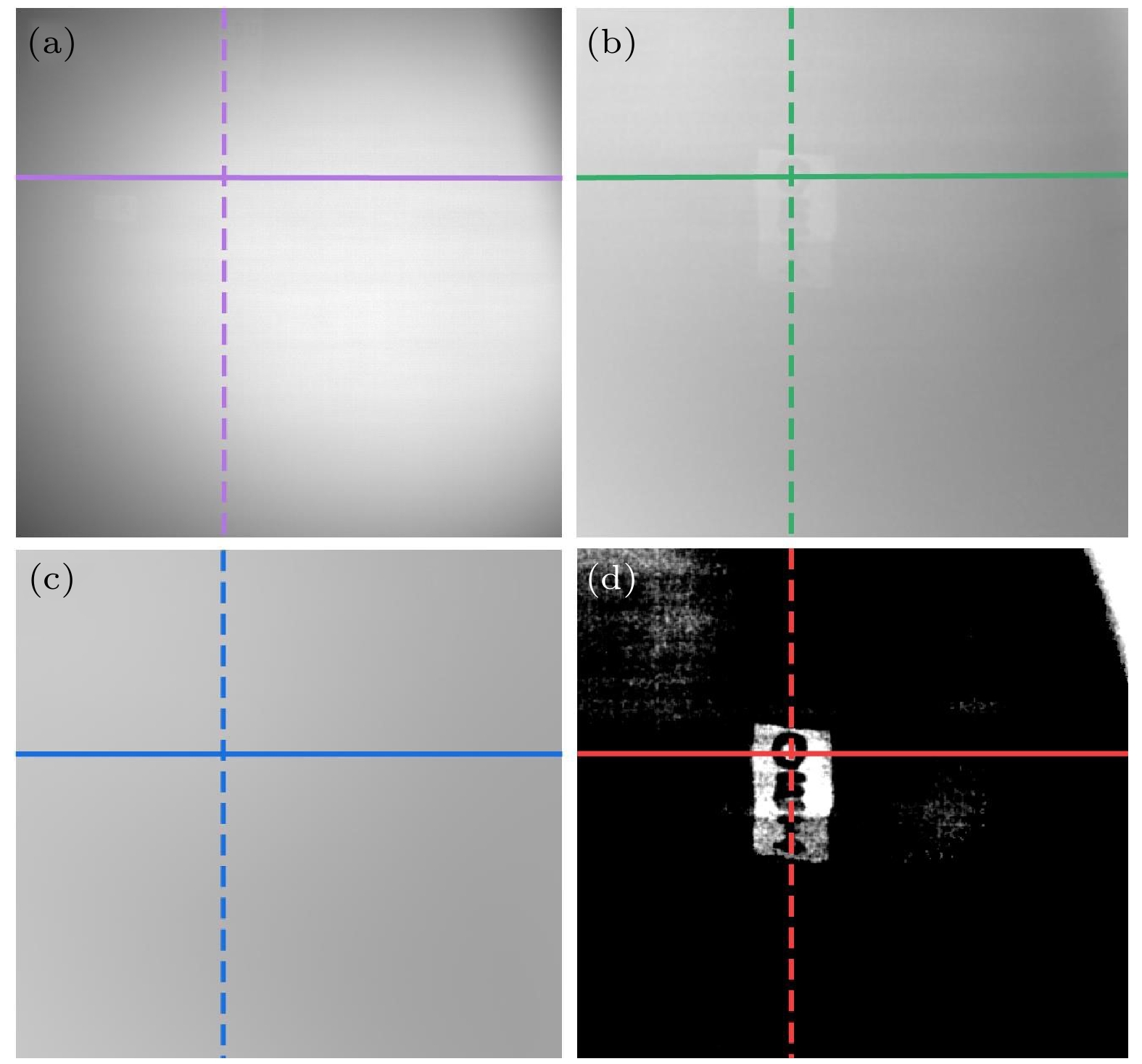 图 4 水下偏振成像实验结果 (a) 原始强度图像; (b) 偏振共模抑制图像; (c)和(d)分别为文中所述方法分离的背景散射光和目标信息光图像
图 4 水下偏振成像实验结果 (a) 原始强度图像; (b) 偏振共模抑制图像; (c)和(d)分别为文中所述方法分离的背景散射光和目标信息光图像 图 5 实验结果图像像素强度统计 (a) 图4(a), 图4(b), 图4(c)和图4(d)中第196行像素强度分布; (b) 图4(a), 图4(b), 图4(c)和图4(d)中第253列像素强度分布
图 5 实验结果图像像素强度统计 (a) 图4(a), 图4(b), 图4(c)和图4(d)中第196行像素强度分布; (b) 图4(a), 图4(b), 图4(c)和图4(d)中第253列像素强度分布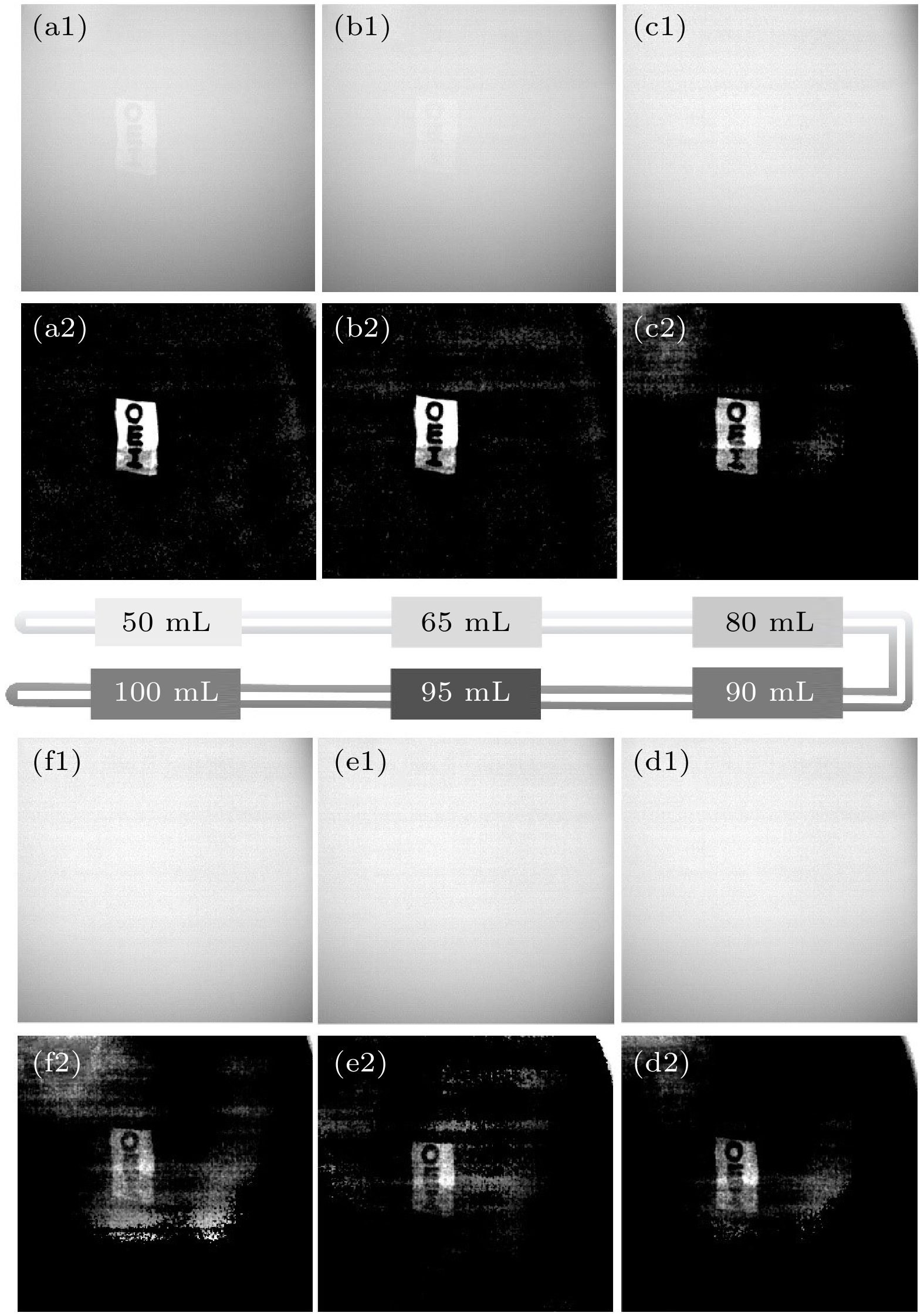 图 6 不同浓度溶液中实验结果 (a1)—(f1) 为原始强度图像; (a2)—(f2) 为重建结果
图 6 不同浓度溶液中实验结果 (a1)—(f1) 为原始强度图像; (a2)—(f2) 为重建结果 图 7 图像质量评价参数的客观评价结果
图 7 图像质量评价参数的客观评价结果