1.College of Physical Science and Technology, Shenyang Normal University, Shenyang 110034, China 2.College of Information Science and Engineering, Huaqiao University, Xiamen 361021, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11875135, 11347003), the High-level Talent Support Program of Shenyang Normal University, China, and the Postgraduate Education Reform Project of Shenyang Normal University, China (Grant No. YJSJG320210100).
Received Date:17 March 2021
Accepted Date:20 May 2021
Available Online:18 September 2021
Published Online:05 October 2021
Abstract:Biomolecular motors are macromolecules of enzyme proteins that convert chemical energy into mechanical energy. Experimental studies have shown that the directed movement of the biomolecular motor fully participates in the material transport process in the cell. Theoretically, the directed movement of biomolecular motors can be studied by the ratchet model. However, in most of feedback control ratchet models, none of the influences of external factors on experimental manipulation is considered, especially the inevitable random error, systematic error and human error in the experiment. Therefore, in order to further study the influences of error factors on feedback control ratchets, Cao's research group (Feito M, Cao F J 2007 Eur. Phys. J. B59 63) pioneered the idea of error probability and discussed the transport behavior of feedback ratchets in the presence of error probability.Based on Cao's error ratchet model, in this paper the temperature factor in introduced to further control the feedback ratchets, and the directed transport characteristics of the coupled Brownian particles in the temperature feedback ratchets are studied. The effects of temperature factor, phase difference and temperature frequency on the directed transport of coupled Brownian particles are discussed in detail. It is found that the temperature factor does not always reduce the directed transport of Brownian particles. There is a minimum value which means that the temperature factor can enhance the directed transport of the feedback ratchets within a certain change interval. In addition, in a small temperature amplitude range, the directed transport of the coupled particles exhibits a multi-peak structure with the change of temperature frequency. It is means that the appropriate temperature change frequency can enhance the directed transport of the feedback ratchets multiple times. The conclusions obtained in this paper can not only inspire experimental selection of appropriate temperature feedback information to optimize the directed transport of the Brownian ratchets, but also provide theoretical references for analyzing and processing the experimental data, especially error analysis. Keywords:temperature feedback ratchets/ error probability/ temperature factor/ directed transport
全文HTML
--> --> --> 1.引 言生物分子马达是将化学能转化为机械能的酶蛋白大分子. 实验研究表明, 生物分子马达的定向运动充分参与了细胞内的物质输运过程, 如胞膜穿梭、信号传导和病毒包装等[1-3]. 最新的实验研究还发现, 肌球蛋白的突变与扩张性或肥厚性的心肌病、视网膜色素变性和失聪等症状有关; 动力蛋白的失活是导致男性不育的原发性纤毛运动障碍的原因之一. 随着生物分子马达的高持续免洗快速检测技术的日渐成熟, 实验者们可以把标记物(如荧光探针)快速移动到探测窗口, 这一操作省却了传统检测方法中标记物的清洗步骤, 进而实现了生物分子马达的快速定量探测[4]. 由此可见, 生物分子马达定向输运的研究对生物学、医学乃至未来分子机器的研发等都具有十分重要的意义[5-7]. 理论上, 生物分子马达的定向运动都可用棘轮模型进行研究[8-12]. 然而, 其中大多数的研究模型都是不依赖于系统状态的开环棘轮. 如Rosalie和Fabrice[13]详细讨论了外势变化时的开环棘轮, 模型为$\gamma \dfrac{{{\text{d}}x}}{{{\text{d}}t}} = - \dfrac{{{\text{d}}V\left( {x - vt, s} \right)}}{{{\text{d}}x}} - F + \xi \left( t \right)$. 本模型描述了经典过阻尼布朗粒子在外势、外力和高斯白噪声作用下的随机运动, 发现粒子流随外势驱动速度$ v $的增加能够呈现最大值. Pawel和Felix[14]还研究了振荡周期势中的开环布朗棘轮, 发现粒子流会随外力的增加而增大. 通过对开环棘轮的不断探索, 理论上人们又提出了依赖于棘轮状态的闭环棘轮[15-18]. 对于这种控制策略, Wang和Bao[19]对反馈闪烁棘轮进行了研究, 耦合粒子的运动方程为$\gamma {\dot x_i}\left( t \right) = - z\left( t \right)\;\dfrac{{\partial {U_i}\left( {{x_i}} \right)}}{{\partial {x_i}}} + k\;\left( {{x_{i + 1}} - 2{x_i} + {x_{i - 1}}} \right)\; +$$\sqrt {2 D} {\xi _i}\left( t \right), i = 1, 2, \cdots, N $. 该模型主要研究受反馈控制$ z\left( t \right) $、外势、耦合力及噪声作用下布朗马达的定向运动. 这种闭环控制方式主要通过判断耦合粒子受到外势的平均作用而实现反馈控制. 当耦合粒子受到的平均作用力大于零时, 外势处于打开状态($ z\left( t \right) = 1 $); 反之, 外势处于关闭状态($ z\left( t \right) = 0 $). Wang和Bao[19]发现闪烁周期是影响粒子流大小的关键因素. 此外, Feito等[20]还详细研究了反馈摇摆棘轮, 发现在外力振幅和频率的共同作用下粒子的定向输运速度能够呈现多峰结构. 这种闭环棘轮的整流作用主要依赖于系统随时间的演化, 也就是说外势的调制与系统的状态有关. 如果知道任意时刻粒子的位置, 根据上述开关的控制方式布朗粒子能够产生定向运动(几率流). 实验上为了实现上述控制方法, 研究者们通过监测溶液中胶体粒子的状态, 进而可以对外势的打开或关闭实施反馈控制[21]. 然而, 在大多数反馈棘轮的控制中, 如文献[15-18]的反馈控制, 并没有考虑外界因素对实验操控的影响, 特别是实验上不可避免的随机误差、系统误差和人为误差等因素对实验操作的影响. 由此, 为了进一步研究误差因素对反馈棘轮的影响, Feito 和Cao[22]开创性地提出了误差概率$ p $这一思想, 并讨论了误差概率存在下反馈棘轮的输运行为. 研究结果表明, 粒子流会随误差概率的增加而减小. 误差概率$ p $的引入打破了人们对固有反馈棘轮的认识, 为反馈控制棘轮模型的研究提供了新方向. 然而, 在早期关于误差概率存在下反馈棘轮的研究中, Cao的研究组仅讨论了误差概率$ p $存在下棘轮的定向输运问题, 有关误差概率究竟是由什么因素引起的, 特别是$ p $在实验中会受哪些实际因素的影响并不是十分清楚. 因此, 深入探索$ p $的产生条件以及由此带来的影响是十分必要的. 此外, 实验研究还发现, 生物分子马达在微管间的运动要受介质环境的作用, 特别是温度会对分子马达的定向运动有较大影响. 例如, Jayannavar研究组[23]讨论了热浴环境中的反馈布朗粒子, 发现热噪声强度是影响粒子流大小的主要因素. 我们研究小组也讨论了双阱棘轮势中的反馈布朗粒子, 发现在一定条件下粒子流呈周期性变化, 且这种周期性会随热噪声强度的增大而变得越来越不明显[24]. 最近的实验研究表明, 环境温度越高, 粒子的运动越剧烈, 实验上对粒子进行的反馈控制就越不容易实现, 因此误差$ p $的产生概率也会随之增大. 由此可见, 上述和温度相关的反馈控制棘轮的研究实例为分析不同温度下布朗马达的反馈操控问题提供了理论启发. 进而深入讨论由温度变化带来的实验误差概率的影响更具实际意义. 这一理论研究还可为反馈棘轮的实验操控、数据分析以及误差分析等提供强有力的理论支撑. 本文主要研究了不同临界温度、温度频率和相位差等作用下反馈棘轮的定向输运, 讨论了这些因素对耦合布朗马达质心平均速度、质心扩散系数$ {D_{{\text{eff}}}} $及$ Pe $数的影响. 研究发现, 合适的温度相位差、频率和临界温度都能促进温度反馈棘轮的定向输运. 此外还发现, 在温度振幅及温度频率的共同作用下, 耦合布朗粒子的定向运动会出现多峰结构. 本文所得结论不仅能为实验上的反馈操控提供理论依据, 还可为后续的数据分析与处理、误差来源分析与计算提供理论启发.



























































































































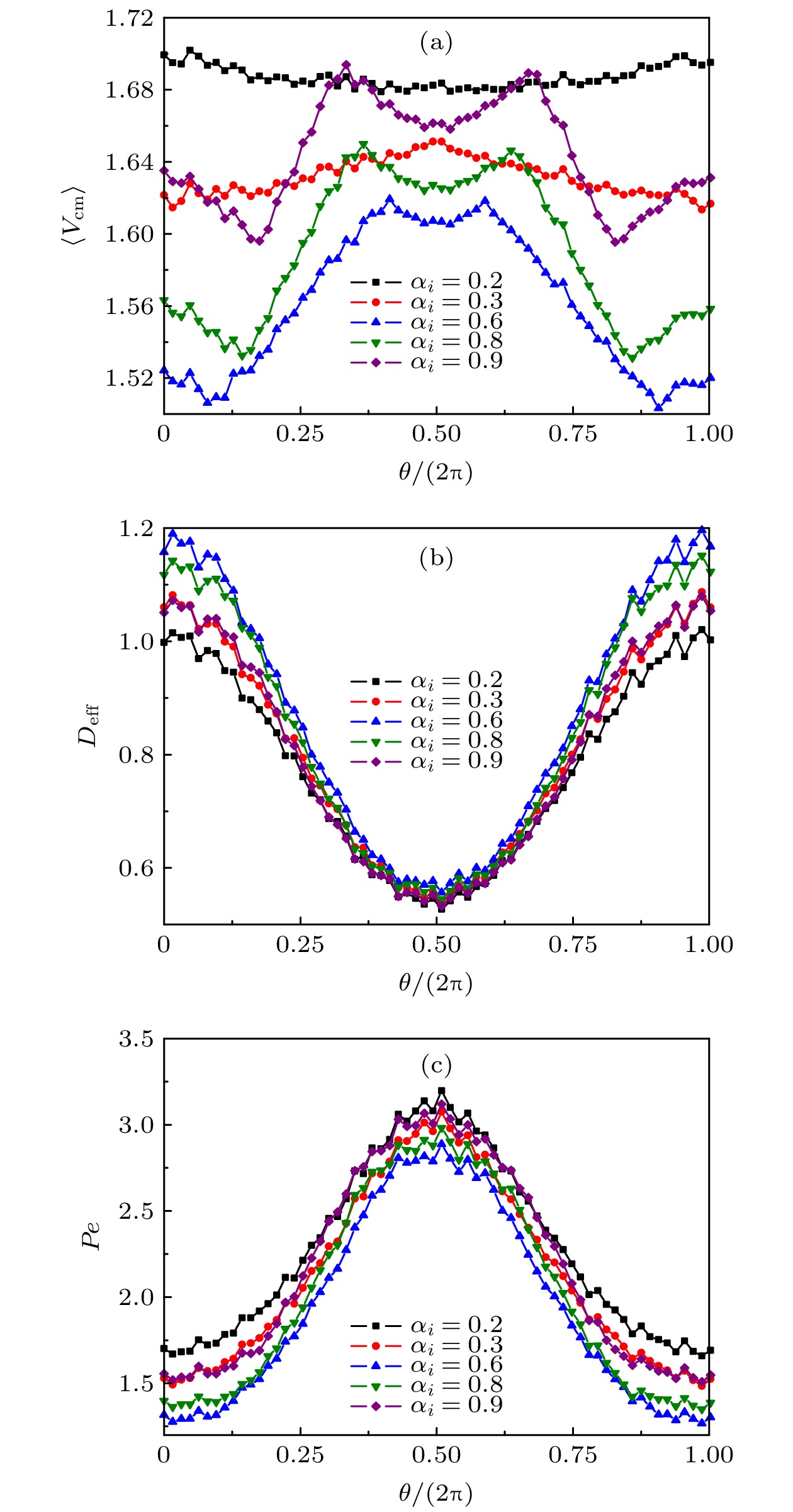 图 1 (a) 质心平均速度
图 1 (a) 质心平均速度

































































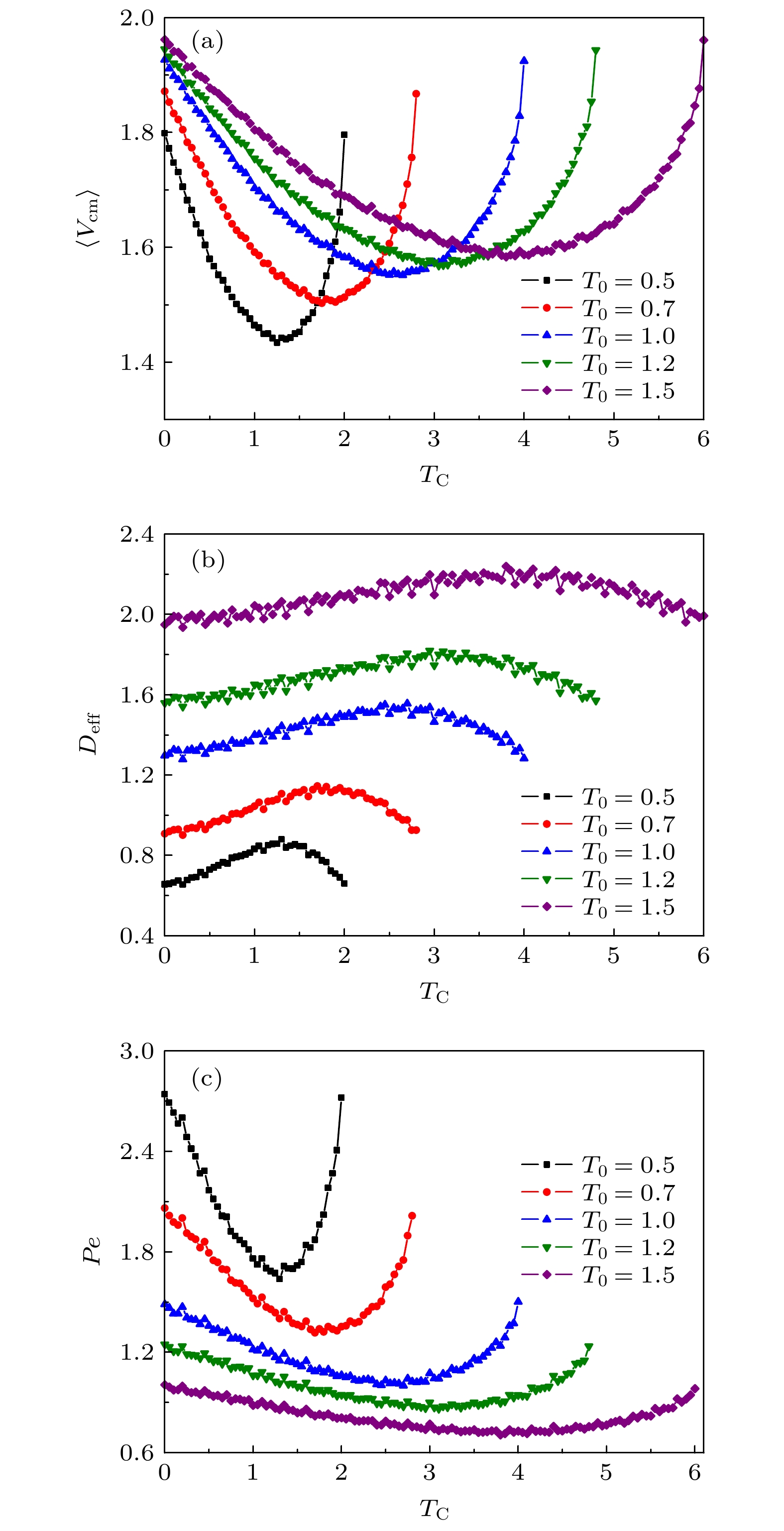 图 2 (a) 质心平均速度
图 2 (a) 质心平均速度














































































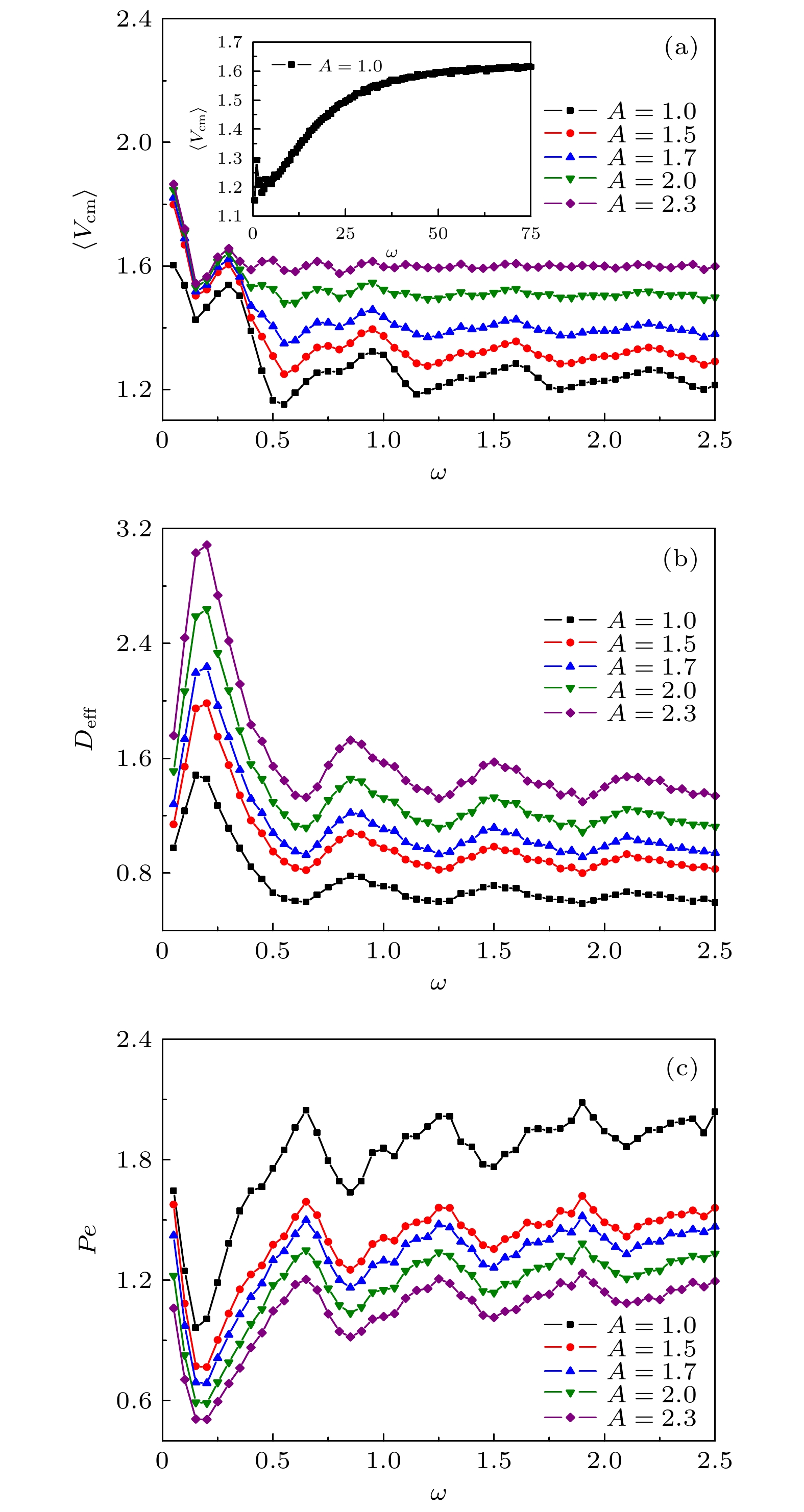 图 3 (a) 质心平均速度
图 3 (a) 质心平均速度














































