全文HTML
--> --> -->柔性压力传感器所探测的输入信号为压力信号, 根据工作机理的不同, 一般可以分为: 压阻式[17,18]、电容式[19,20]、压电式[21,22]及其他类型(摩擦发电式[23,24]、有机场效应管[25]等). 不同类型的传感器往往也具有不同的特点. 例如柔性电容式压力传感器是通过感应材料电容量的变化, 将力学信号转化为电容信号, 其特点是对于微小力的作用敏感, 能够检测微小的静态力; 柔性压电式压力传感器具有高灵敏度和快速响应的特点, 被广泛应用于实时监测动态力学变化, 但无法监测恒定的压力; 基于摩擦发电、有机场效应管的柔性压力传感器普遍存在稳定性差的问题, 在压力监测过程中可能会出现测量信号漂移的现象. 相比以上几种柔性压力传感器, 柔性压阻式压力传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择[26].
与传统的刚性压力传感器相比, 柔性压阻式压力传感器既需要柔性又需要良好的传感性能, 使其能适应不同的应用场景. 尽管柔性压阻式压力传感器的研究已经取得了较大的进展, 但如何通过活性层材料的选用和柔性传感结构的设计, 来大规模制备低成本、高灵敏度的器件仍然是一个巨大的挑战[27]. 本文全面综述了柔性压阻式压力传感器的研究进展. 首先, 在第二节中对柔性压力传感器的性能参数以及工作机制进行了详细的讨论. 其次, 在第三节中从如何优化柔性压阻式压力传感器传感性能的角度出发, 总结了活性层材料种类以及微结构设计类型. 最后, 在第四节讨论了目前柔性压阻式压力传感器的应用场景, 并对其未来的潜在应用进行了展望.
2.1.柔性压阻式压力传感器的性能参数
柔性压阻式压力传感器本身作为一种“媒介”, 通过将施加的压力转化为电阻信号而对外界刺激做出响应. 为了设计综合性能优异且实用性强的柔性压阻式压力传感器, 需要一些性能参数来定量评估器件的综合性能. 这些性能参数包括: 灵敏度、传感范围、响应时间、弛豫时间、迟滞及稳定性等[14].灵敏度(S)指电阻的相对变化随外加压力变化曲线的斜率, 是描述压力传感器将压力信号转变为电阻信号能力的关键性能参数. 柔性压阻式压力传感器灵敏度的公式为





响应时间是指柔性压阻式压力传感器的电阻信号达到稳定输出值90%时所需的时间; 弛豫时间是指柔性压阻式压力传感器在去除施加压力后电阻信号从稳定输出值变为初始值所需的时间. 二者是评价传感器实时动态压力传感性能的重要参数. 一方面, 与活性材料的黏弹性, 以及材料和电极的接触情况有关[6,32]; 另一方面, 与读取传感器电阻值的设备分辨率有较大关联. 迟滞是指柔性压阻式压力传感器在去除负载压力时不能恢复其未加载压力时电学特性的现象, 是衡量在加载-卸载压力循环下压力曲线中输出信号差异性的参数[33].
稳定性是指柔性压阻式压力传感器在多循环周期使用条件下传感能力的大小. 它是评估器件能否长时间或多周期在仿生电子皮肤、健康监测等领域进行实际应用的重要参数. 一般为了测试传感器的稳定性, 需要对器件进行连续的加载-卸载测试循环, 加载-卸载测试循环次数越高, 代表压力传感器的稳定性越好.
2
2.2.柔性压阻式压力传感器的传感机制
电阻型压力传感器由弹性导体层或半导体层组成的活性层与两个电极接触组成, 并将施加的压力刺激转换成电阻信号的变化. 传感器的总电阻由电极电阻和活性层电阻两部分组成, 针对某一确定的电阻型压力传感器, 电极电阻一般为固定值, 传感器电阻信号的变化主要取决于活性层电阻值的变化. 电阻型压力传感器电阻(R)的计算公式为
3
2.2.1.基于半导体材料能带结构变化
传感器活性层材料不仅需要具备一定的导电性, 还需要对外部力的刺激具有敏感性. 半导体材料在外力形变下能带结构发生变化, 从而改变电阻率值, 因而具备应用于柔性压阻式压力传感器的潜力. 半导体材料种类多样, 既能满足传感器压力区间差异性需求, 也能为设计不同性能侧重点的压力传感器提供新的思路. 以p型Si半导体传导过程为例(图1(a)), 传导过程依赖于空穴在价带中的运动, 当沿着[111]方向对p-Si半导体施加牵引力, 出现了能带变化, 空穴分布也随之发生变化, 因为失去能量的空穴移动到顶部, 导致“重空穴”, “轻空穴”带则降低. 随着迁移率降低的空穴数增加(平均空穴迁移率μ减小), 电阻率(ρ)增大, 电导率减小[34].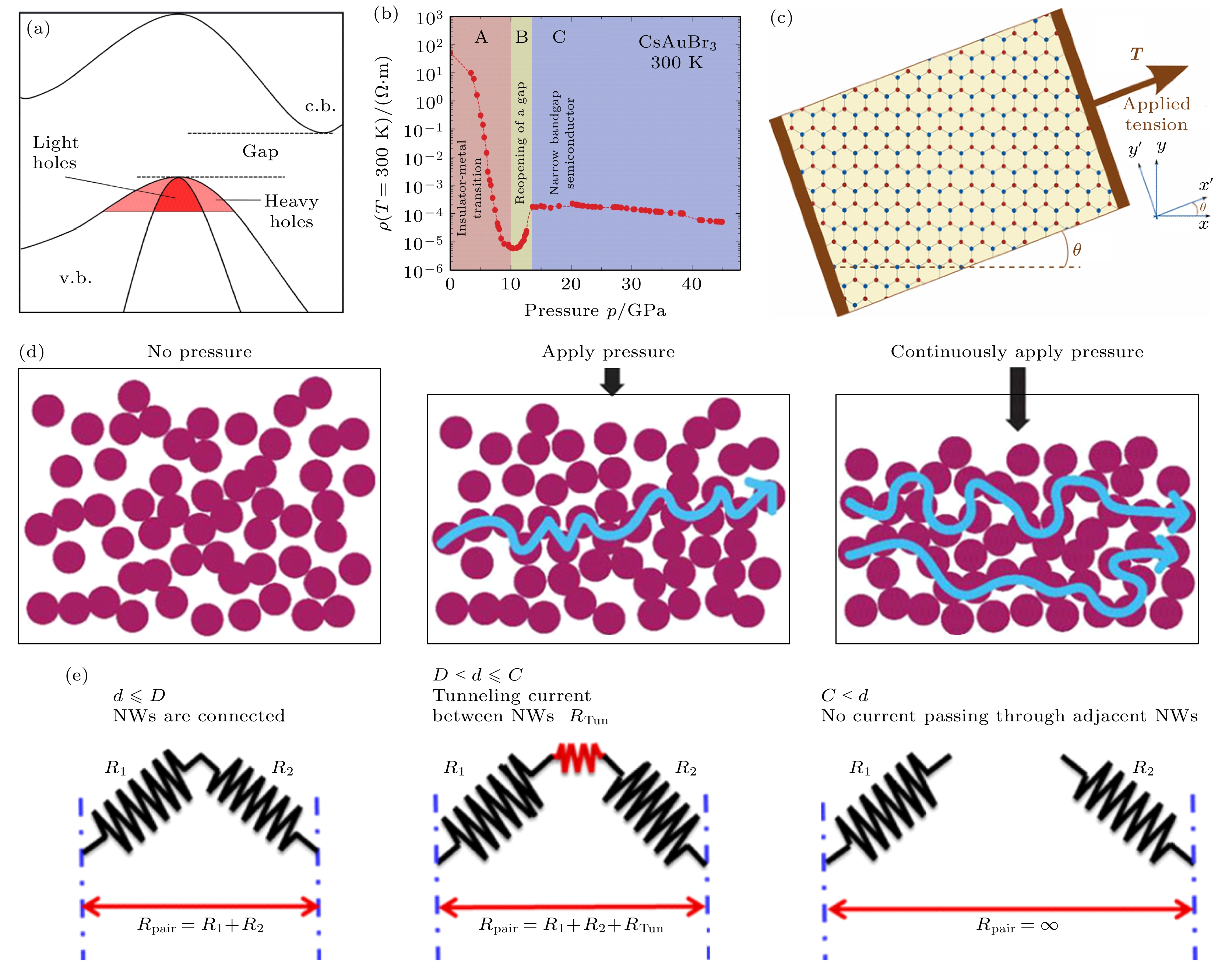 图 1 (a)半导体硅在[111]和[100]波数方向的导带和价带[34]; (b)化合物CsAuBr3在27 ℃下, 45 GPa压力范围内电阻率的变化[35]; (c)石墨烯片层沿指定方向均匀拉伸或压缩[38]; (d)通过按压导电聚合物复合材料降低电阻率的示意图[45]; (e) 相邻纳米线之间的不同电接触情况[50]
图 1 (a)半导体硅在[111]和[100]波数方向的导带和价带[34]; (b)化合物CsAuBr3在27 ℃下, 45 GPa压力范围内电阻率的变化[35]; (c)石墨烯片层沿指定方向均匀拉伸或压缩[38]; (d)通过按压导电聚合物复合材料降低电阻率的示意图[45]; (e) 相邻纳米线之间的不同电接触情况[50]Figure1. (a) Conduction band and valence band in silicon along [111] and [100] κ-directions[34]; (b) Evolution of the resistivity of CsAuBr3 at 27 ℃ in a pressure range up to 45 GPa[35]; (c) the graphene sheet is uniformly stretched or compressed along a prescribed direction[38]; (d) schematic illustration of decrease in resistivity by pressing a conductive polymer composite[45]; (e) different electrical interconnections between two adjacent NWs[45].
3
2.2.2.基于导电高分子复合材料的渗流理论
大多数压力传感器由低杨氏模量的弹性体结构和表面导电层组成, 但这种两层结构模型对高性能压力传感器的长期稳定性提出了更高的要求. 因为在长期稳定性循环测试中, 由于弹性体形变层与表面导电层之间存在杨氏模量失配, 从而出现表面导电层产生裂纹甚至从变形层脱落的现象[39]. 因此, 为了保证柔性压阻式压力传感器的循环稳定性, 人们提出了基于导电高分子复合材料的渗流理论[40-43], 开发出一种兼具高电导率和低杨氏模量的渗透型导电复合纳米材料, 以此作为柔性压阻式压力传感器的传感层来替代传统的两层结构模型.导电高分子复合材料由聚合物基体和导电填料组成, 导电填料可以是无机/有机等导电材料. 电阻率的大小取决于导电填料的体积含量. 当导电填料的体积含量极低时, 聚合物基体中导电粒子间平均距离较大, 未形成导电通路, 导电性受聚合物基体的限制, 电阻率较高; 随着导电填料的体积含量的增加, 导电粒子间的平均距离缩小, 形成部分导电通路, 电阻率呈下降趋势; 当导电填料的体积含量足够大时, 在聚合物基体中导电填料颗粒相互靠近形成连接, 从而形成贯穿整个材料的完整导电网络. 导电高分子复合材料将从初始的绝缘聚合物基体转变为导体, 根据渗流理论, 此时导电填料的临界体积比称为渗流阈值[44].
因此, 在设计基于渗流理论的柔性压阻式压力传感器时, 要保证传感器的灵敏度及压力范围. 如(图1(d))所示, 首先要控制导电填料的体积含量, 在导电高分子复合材料内部仅形成部分导电通路. 当对传感器施加压力时, 导电粒子间的平均距离开始缩小, 形成了更多的导电通路, 因此导电高分子复合材料的电阻率值降低[45]. 例如, Wang等[46]通过在EcoFlex基体中加入磁性还原型氧化石墨烯和镍纳米线两种导电填料(mGN), 制备了高透明度、柔性渗透型压阻式压力传感器. 导电填料较大的体积比及有序排布方式使得此渗透型复合材料的逾渗阈值较低(0.27%, 体积分数), 电导率高达0.003 S·m–1, 光学透过率为71.8%, 杨氏模量低至122.8 kPa.
3
2.2.3.基于导电高分子复合材料的隧穿效应
基于导电高分子复合材料的隧穿效应是指在导电高分子复合材料量中, 导电填料之间的电子穿过原本无法通过的“能量势垒”的现象[47-49]. 在此效应下, 电子存在一定的概率从低能量态跃迁至高能量态, 从而形成隧穿电流. 例如Amjadi等[50]报道了一种基于隧穿效应的复合夹心结构材料(即将银纳米线薄膜嵌入两层PDMS弹性体之间). 当相邻的两条纳米线(NWs)的中心线之间的距离(d)小于或等于纳米线直径(D)(即




Yang等[52]为了更准确地表征隧穿效应的影响, 建立了基于石墨烯橡胶复合材料的代表性体积元数值模型(RVE模型), 利用该模型分别分析了石墨烯含量为2.3%(质量分数)的复合材料在忽略和考虑隧穿效应时电流密度的计算结果. 研究发现在石墨烯橡胶复合材料中, 电子迁移能力与石墨烯片层之间的距离密切相关, 部分距离较小的石墨烯片层有可能发生电子迁移. 在未考虑隧穿效应的情况下, 复合材料中橡胶基体的电流密度最小, 石墨烯橡胶复合材料在此状态下绝缘; 另一方面, 当在考虑隧穿效应的情况下, 复合材料和橡胶基体的隧道电流密度显著增大, 约为未考虑隧穿效应时的106倍.
这些结果均表明隧穿效应更有助于复合材料中导电通路的形成. 因此, 隧穿效应对于准确预测导电高分子复合材料的导电性至关重要, 其重要性不可忽略.
3
2.2.4.基于界面接触电阻的变化
通过筛选纳米复合材料的种类或者控制材料的用量构建高分子复合材料导电网络无法进一步提高传感器灵敏度等性能. 研究****为了打破这种局限性, 建立了基于界面接触电阻变化机制的设计模式[53-56]. 所有固体表面在微观尺度上都是粗糙的, 因此两种材料之间的界面接触发生在两个表面微凸体机械接触产生的接触点上, 真正接触的面积仅是名义接触面积的一小部分. 而电流线束则会经由这些独立分开的接触点传输[57] (图2(a)). 接触点数量和尺寸的变化直接决定了电阻值的变化, 因此通过调控接触微凸体的尺寸、数量及优化接触点的分布等条件, 使接触的总面积尽可能大, 可以获得更小的电阻值[54].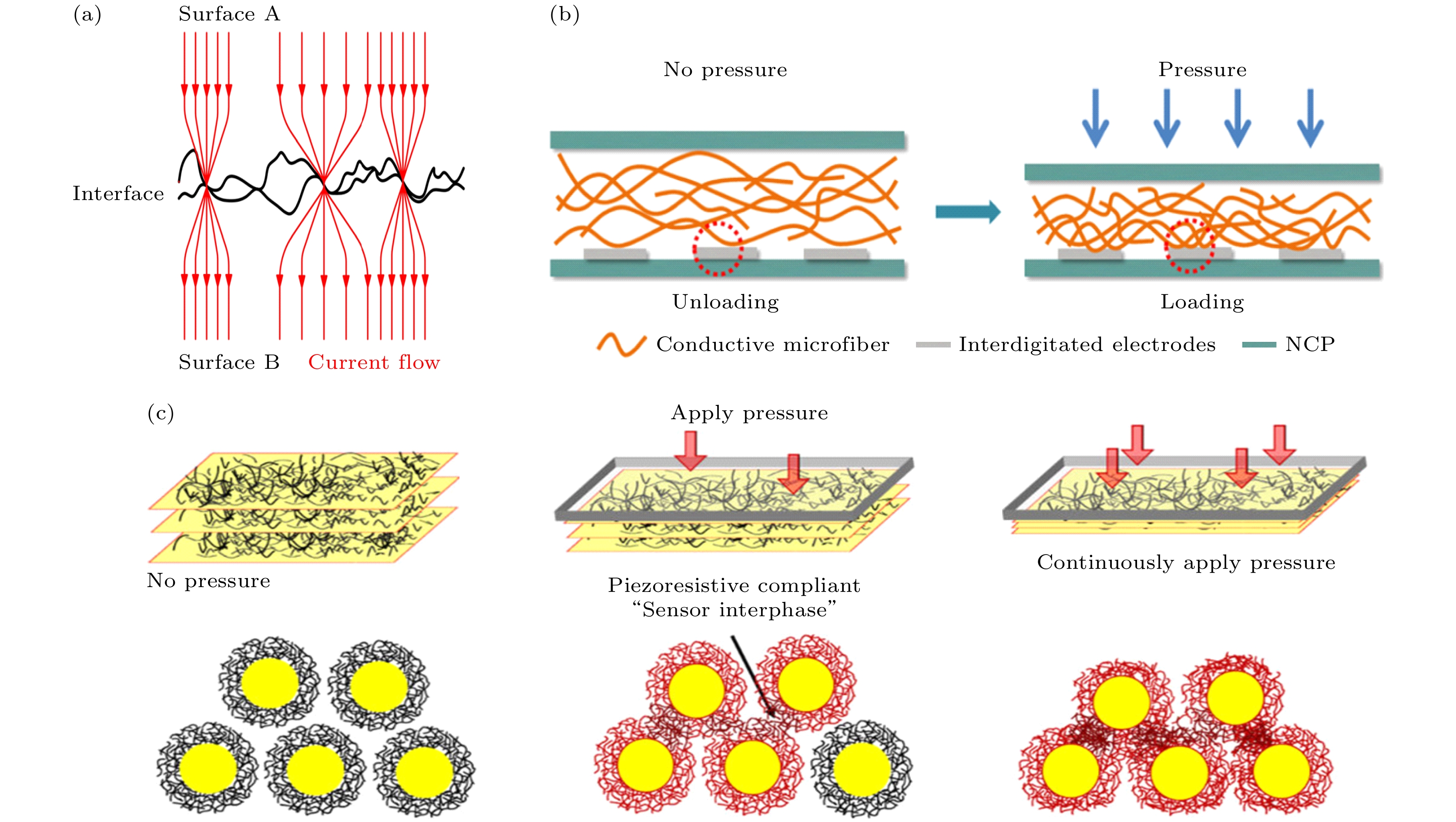 图 2 基于界面接触电阻的变化 (a)两种固体材料接触界面的示意图[54]; (b)电极-活性层接触型压力传感器的工作机理[58]; (c) PEI-CNT涂层的非导电纤维在外加压力下的传感机理[59]
图 2 基于界面接触电阻的变化 (a)两种固体材料接触界面的示意图[54]; (b)电极-活性层接触型压力传感器的工作机理[58]; (c) PEI-CNT涂层的非导电纤维在外加压力下的传感机理[59]Figure2. Change based on interface contact resistance: (a) Schematic diagram of a bulk electrical interface[54]; (b) working mechanism of pressure sensor of electrode-active layer contact type[58]; (c) PEI-CNT coated non-conductive fibers under applied pressure showing the proposed sensing mechanism[59].
基于界面接触电阻变化机制的柔性压阻式压力传感器可以分为两类. 一类是电极与活性层材料之间形成的界面接触电阻. 例如Gao等[58]以镀银纳米线的棉纸为传感材料, 以纳米纤维素纸(NCP)为印刷叉指电极的底层基板, 制备了一种全纸基的柔性压阻式压力传感器. 该传感器在0.03—30.2 kPa压力范围内灵敏度为1.5 kPa–1, 其响应机理为: AgNWs包覆的组织纸表面多孔粗糙, 与叉指电极接触的棉纸导电纤维数量取决于外部加载压力. 当施加外压时, 棉纸的压缩变形会导致更多的导电纤维与叉指电极接触, 从而更多的导电通路使得接触电阻变小, 在0.1 V固定电压下的电流增大(图2(b)). 另一类是活性层材料内部自身形成的接触电阻. 例如Doshi等[59]将聚乙烯亚胺(PEI)功能化碳纳米管作为涂层均匀的电沉积在非导电纤维上, 以此复合纤维作为活性层制备了柔性压阻式压力传感器. 当施加压力时, 纳米复合材料压缩变形导致活性层中形成了纤维-纤维电接触, 因此纤维-纤维接触使得电阻发生变化(图2(c)).
通过设计活性层的微结构, 改变材料接触面的粗糙程度等方法, 均可实现对界面接触电阻的调控, 以满足对柔性压阻式压力传感器的不同灵敏度的需求, 如图3所示. 这也为开发综合性能优异的柔性压阻式压力传感器提供了新的思路.
 图 3 柔性压阻式压力传感器活性层材料、微结构类型及应用概述. 柔性压阻式压力传感器活性层材料的组分包括: 碳基纳米材料[60]、金属基纳米材料[61]、导电聚合物[62]、绝缘弹性体[63]等; 柔性压阻式压力传感器微结构设计类型包括: 单一微凸体结构(如金字塔结构[64])、复合微凸体结构(如多孔金字塔结构[65]、互锁结构[48]等)及三维多孔结构[66]; 柔性压阻式压力传感器主要应用于电子皮肤感知[67]和健康检测[68]等领域
图 3 柔性压阻式压力传感器活性层材料、微结构类型及应用概述. 柔性压阻式压力传感器活性层材料的组分包括: 碳基纳米材料[60]、金属基纳米材料[61]、导电聚合物[62]、绝缘弹性体[63]等; 柔性压阻式压力传感器微结构设计类型包括: 单一微凸体结构(如金字塔结构[64])、复合微凸体结构(如多孔金字塔结构[65]、互锁结构[48]等)及三维多孔结构[66]; 柔性压阻式压力传感器主要应用于电子皮肤感知[67]和健康检测[68]等领域Figure3. Overview of flexible piezoresistive pressure sensor active layer materials, microstructure types and application. The components of the active layer materials of flexible piezoresistive pressure sensors include carbon nanomaterials[60], metal materials[61], conductive polymers[62], insulating elastomers[63]; The microstructure types of flexibility piezoresistive pressure sensor include single microstructure (such as pyramid structure[64]), composite microstructure (such as porous pyramid structure[65], interlocking structure[48]) and 3D porous structure[66]; and the application of flexible piezoresistive pressure sensor: electronic skin[67] and health monitoring[68].
2
3.1.柔性压阻式压力传感器常用的活性层材料
根据柔性压阻式压力传感器传感机制的不同, 常用的活性层材料一般指集成到绝缘弹性基底上的导电纳米材料或者由绝缘弹性基体和导电纳米填料组成的复合材料. 活性层材料的组成包括: 聚合物弹性体、金属基材料、碳基纳米材料、导电聚合物等(图3).聚合物弹性体经常被用作压力传感器的柔性基底, 通过导电纳米材料依附于聚合物弹性体表面而形成活性传感层. 但由于导电纳米材料与聚合物弹性体存在杨氏模量失配的问题, 容易导致器件的稳定性差. 例如将导电层聚(3, 4-乙烯二氧噻吩)-聚苯乙烯磺酸(PEDOT:PSS)涂布在聚二甲基硅氧烷(PDMS)等微结构变形层的表面, PDMS变形层(杨氏模量为2.5 MPa)[81]与PEDOT:PSS导电层(杨氏模量约为2 GPa)[82]之间的存在较大差异, 在长期加卸载循环过程中容易引导致电层脱落引起稳定性问题[46]. 将低杨氏模量聚合物弹性体和高电导率纳米填料混合, 制备较低杨氏模量、较高电导率的复合材料作为柔性压阻式压力传感器活性层材料可以解决以上问题[83].
低杨氏模量聚合物弹性体作为活性层材料的常见载体包括PU[61,84,85]和PDMS[86]等. 例如Lee等[61]利用低模量PU弹性体与海胆状金属基纳米颗粒制备了一个高度敏感、透明耐用的压阻式压力传感器(图4(a)). PU弹性体具有良好的弹性和稳定性, 使器件最大压力范围可达18 kPa. 通过改变尖刺之间的接触率来提高面积的变化率, 尖端的接触产生隧穿效应, 使该传感器灵敏度高达2.46 kPa–1(图4(b)). 30 ms的快速感应时间可以用于检测非常小的外界压力, 应用于检测人体肌肉的细微运动等. 类似的金属基纳米颗粒在导电纳米复合材料中间距较小, 纳米颗粒之间的电子输运以隧穿为主, 而无序的金属基纳米颗粒阵列中存在大量的导电路径. 由于量子隧穿对粒子间间距极其敏感, 通过对金属基纳米颗粒阵列施加几何结构的微小变化, 可以打破或再生新的导电路径. 因此, 金属基纳米颗常被用于制作超灵敏压阻式压力传感器的导电填料.
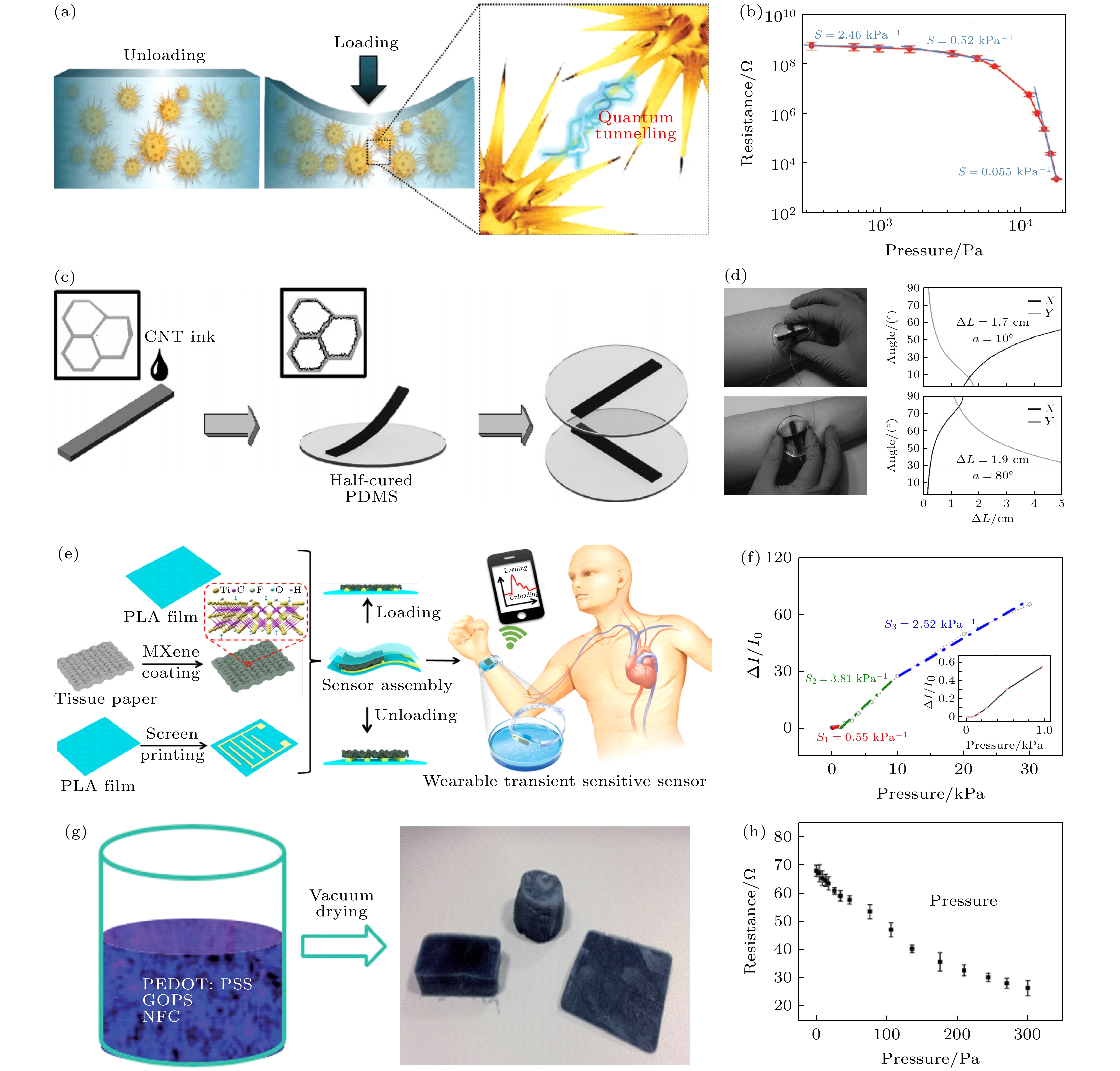 图 4 柔性压阻式压力传感器常用的代表性活性层材料 (a), (b) 海胆状金属基纳米颗粒和弹性体应用于柔性压阻式压力传感器的制备[61]; (c), (d)碳基材料(CNTs)应用于柔性压阻式压力传感器的制备[94]; (e), (f) 碳基材料二维MXene应用于柔性压阻式压力传感器的制备[60]; (g), (h) 导电聚合物PEDOT:PSS应用于柔性压阻式压力传感器的制备[115,116]
图 4 柔性压阻式压力传感器常用的代表性活性层材料 (a), (b) 海胆状金属基纳米颗粒和弹性体应用于柔性压阻式压力传感器的制备[61]; (c), (d)碳基材料(CNTs)应用于柔性压阻式压力传感器的制备[94]; (e), (f) 碳基材料二维MXene应用于柔性压阻式压力传感器的制备[60]; (g), (h) 导电聚合物PEDOT:PSS应用于柔性压阻式压力传感器的制备[115,116]Figure4. Typical active layer materials for flexible piezoresistive pressure sensors: (a), (b) Sea urchin-like metal-based nanoparticles and elastomers are used in the preparation of flexible piezoresistive pressure sensors[61]; (c), (d) carbon-based material(CNTs) used in the preparation of flexible piezoresistive pressure sensors[94]; (e), (f) carbon-based material(MXene) used in the preparation of flexible piezoresistive pressure sensors[60]; (g), (h) conductive polymer(PEDOT:PSS) applied to the preparation of flexible piezoresistive pressure sensor[115,116].
金属基材料除了纳米颗粒[87,88]外还包括金属纳米线像铜纳米线[89]、金纳米线[90]及银纳米线[50,91]等. 这些金属基材料具有良好的机械柔性和电学性能, 可用于构建新型超晶格纳米薄膜或者基于渗流理论和隧穿效应的复合导电材料.
碳基纳米材料如碳纳米管(CNTs)、石墨烯等由于其独特的化学稳定性和生物兼容性是制备柔性压阻式压力传感器的适宜材料[92,93]. 一维碳纳米管(CNTs)具备优异的各向异性和良好的导电性能. 此外, 一维碳纳米管溶液良好的化学稳定性使其可通过溶液处理技术直接沉积到柔性基底上. 例如Chen等[94]通过多次浸涂的方式, 将碳纳米管油墨沉积到PU海绵中, 并将复合海绵材料与PDMS基底相结合, 制备了结合碳纳米管和聚氨酯海绵的柔性压阻式压力传感器, 可独立检测全方位弯曲和压力(图4(c)、图4(d)). 石墨烯是一种由sp2键结合的六方排列碳原子组成的二维(2D)碳基材料, 具有高透射率(90%以上)、大比表面积(2630 m2/g)、室温下高电子迁移率(~250000 cm2·V–1·s–1)、高弹性刚度(340 N/m)、可伸展性高达20%等优异性能[95-97]. 制备工艺的差异会影响石墨烯的质量、层数、晶粒尺寸、形貌, 以及半导体性质或导体性质等. 例如利用热化学气相沉积(HFTCVD)技术在不同沉积温度下合成石墨烯具有不同的缺陷度[95], 该石墨烯作为传感材料引入传感器器件中, 其缺陷密度对传感器性能产生强烈的影响, 因此可以通过控制石墨烯的沉积温度达到调节柔性石墨烯基压力传感器的灵敏度的目的. 这是由于石墨烯网络中电荷载流子通过石墨烯晶格本身的缺陷、基于石墨烯岛之间的隧穿效应、类缺陷结构之间的隧穿效应等多种形式散射造成的. 在柔性传感器制备工艺方面, 石墨烯通过化学气相沉积(CVD)和化学剥离等技术在工业上可进行大规模生产后, 主要是采用膜转移的技术来制备传感器件[98-100]. 除此之外, 还原氧化石墨烯法可与丝网印刷、喷涂、真空过滤、旋涂和喷墨印刷等技术结合, 可直接将石墨烯片大面积沉积在柔性底物上, 实现低成本化、可批量生产化[30,101-103]. Shi等[104]提出了一种基于一维金属基银纳米线、二维碳基料还原氧化石墨烯、零维材料富勒烯的复合功能水性油墨, 一步丝网印刷所制备的传感器具有灵敏度高、工作应变范围宽、线性响应特性、低滞后、长期稳定可靠等的综合性能. Huang等[73]制备了一种具有多层结构的压阻式压力传感器, 其中多层结构由还原氧化石墨烯的多层组装而成, 并且由共价分子连接. 通过喷涂的方式将功能化的还原氧化石墨烯油墨沉积到基底上, 利用石墨烯在皮肤应用的兼容性, 可以使用混合多层体系结构进行健康监测. 此外, 该压力传感器是通过溶液加工制作的, 解决了它和印刷电子的兼容性问题.
然而石墨烯和碳纳米管具有很高的模量(~1 TPa)[105], 因此很难通过改变石墨烯和碳纳米管的内部原子结构进一步提高压阻型传感器的灵敏度. 这些缺点促使科学家们寻找新的具有层间原子运动的材料或结构来降低成本, 简化制备步骤, 并且进一步提高灵敏度, 以满足实际应用需求. MXene(Ti3C2Tx)纳米片作为一种新型的二维碳基纳米材料具有大比表面积、优异亲水性、高导电性、高机械强度以及含有大量的活性表面基团(—OH、=O或—F)可以促进界面的化学键合等特点[106,107]. 此外由于MXene层间距离较宽[108], 在外压下具有较高的灵敏度和柔韧性, 能够满足检测微小人类活动的要求, 因此成为制备柔性压阻式压力传感器活性层的热门材料[109-111]. 例如Guo等[60]制作了一种具有夹层多孔结构的柔性可穿戴瞬态压力传感器, 可用于高灵敏度、可再生、无线、可降解、大工作范围(可达30 kPa)的人机界面. 该柔性压力传感器是通过将MXene纳米片浸渍到薄纸中, 并将其夹在生物可降解的聚乳酸薄层和叉指电极涂层的聚乳酸薄层之间组装而成(图4(e)). 装配后的柔性瞬态压力传感器灵敏度提高(图4(f)). 其采用的材料亲肤且具生物降解性, 因此可以直接附着在人体皮肤上, 这种类似电子皮肤的集成器件在描绘触觉刺激、个人健康监测、临床诊断和下一代人造皮肤方面均具有巨大的潜力. Ma等[109]制备了一种MXene/rGO混合组分的3D气凝胶. 基于MXene和rGO两者之间的协同效应, rGO比表面积大, MXene导电性好, rGO的存在也能一定程度上减缓MXene的氧化, 使该气凝胶具有灵敏度高(22.56 kPa–1), 响应时间快(< 200 ms), 稳定性好(10000周期)的特点. 相比纯rGO气凝胶的力学性能和灵敏度, MXene/rGO气凝胶的性能有了很大的提高.
目前, 导电聚合物由于其柔韧性、延展性和高导电率在柔性压阻式压力传感器制造方面显示出巨大的潜力. 导电聚合物的导电性一般来自于离子和电子传导结合的输运性质, 这种传导方式降低了材料的阻抗. 最常见的导电聚合物有PEDOT:PSS[63,64,112]、聚吡咯(PPy)[113]、聚苯胺(PANI)[114]等. 例如Han等[115,116]用PEDOT:PSS、纳米纤维素(NFC)、GOPS三种有机物的水分散液制备了一种热电聚合物气凝胶, 微调导电气凝胶在高沸点极性溶剂二甲基亚砜蒸气中的输运性质可以实现传感器对温度和压力刺激的同时响应, 并且双参数传感器对温度和压力信号的传输没有产生干扰现象(图4(g)、图4(h)).Wang等[112]通过在图形化聚二甲基硅氧烷(PDMS)微凸体顶部旋涂PEDOT:PSS作为压阻式压力传感器的活性层, 制备了高灵敏度(851 kPa–1), 宽工作压力范围(20 kPa)的器件. 虽然导电聚合物的力学性能更接近于柔软的人体皮肤, 是设计仿生电子器件的理想材料; 但是, 导电聚合物的化学稳定性及电子传输性能远不如金属基纳米材料、碳基纳米材料等无机导体或半导体, 使得导电聚合物在实际应用方面存在一定的局限性.
为了设计性能更加优异的柔性压阻式传感器, 亟需开发更多新型活性材料. 新型的二维过渡金属层状材料一般具有良好的电学、力学性质, 例如PtSe2, 其低温生长过程与硅技术兼容, 具有制备高灵敏度柔性压阻式压力传感器的潜力[117]; 纳米纤维材料往往具备轻质、柔性好、比表面积高的特点, 应用于柔性压阻式压力传感器的制备可以显著提高“敏感接触位点”的比例, 进而优化器件性能. 例如SiO2纳米纤维[118]、生物质蚕丝蛋白[119]、聚酰胺纳米纤维[120]等. 除此之外, 传统刚性压阻材料, 例如p型Si纳米线, 沿[111]方向的纵向压阻系数随着直径的减小而增大, 达到

2
3.2.柔性压阻式压力传感器的微结构设计
柔性压阻式压力传感器具备应用于柔性电子皮肤、健康监测等领域的潜力, 这也对柔性压阻式压力传感器的传感性能提出了更高的要求. 简单地将导电纳米材料沉积在绝缘弹性基底上或者改变弹性基体和导电填料的组成, 并不能进一步提高灵敏度和传感范围等性能, 因此需要根据柔性压阻式压力传感器的传感机制对活性层材料进行微结构设计. 微结构设计类型主要有三类, 分别为: 单一微凸体结构(金字塔结构、半球状结构、半柱状结构、无规则结构等); 复合微凸体结构; 三维多孔结构等(图3).单一微凸体结构包括多种潜在形状的活性层, 其中最常见的就是金字塔结构. 例如Choong等[64]制备了一种基于微型金字塔矩阵的可拉伸压力传感器, 通过将PDMS表面做成金字塔式的微观结构, 再覆盖上PEDOT:PSS导电层(图5(a)), 得到了一种具备优良性能的压力传感器(图5(b)). 随着压力施加金字塔矩阵结构发生变形, 金字塔尖端发生了由点接触形状向矩形形状接触的结构变化, 从而增大了活性层与电极的接触面积. 金字塔结构的优点是应力分布不均匀, 应力集中在尖端. 对于给定的外加压力, 相对于非结构表面, 较大的局部应力集中导致接触面积的变化较大.
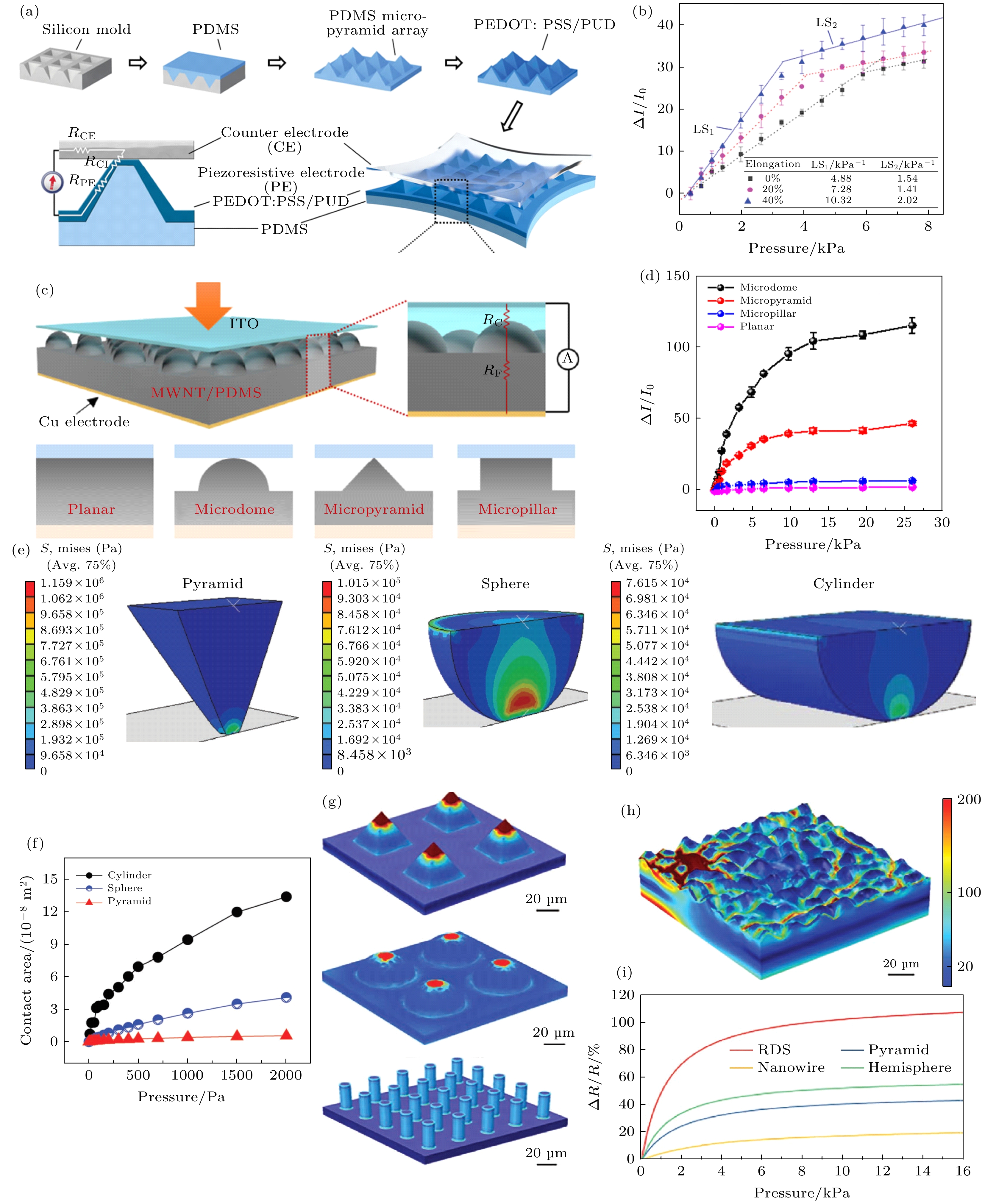 图 5 一种制备工艺: 在金字塔表面涂覆一层PEDOT:PSS薄膜, 电路模型用于推导传感器的传感原理, 它依赖于金字塔的几何形状对压力的响应的变化[64]; (b) 金字塔结构传感器在拉伸时的压力响应及其线性压力灵敏度[64]; (c) 具有不同表面形貌的单一微凸体结构的压力传感原理示意图[32]; (d) 对压力进行响应时的相对电流变化[32]; (e) 压力作用下不同微结构的有限元建模分析[124]; (f)传感器单元的接触面积随压力的变化[124]; (g) 不同几何形状结构: 金字塔、半球、纳米线等在5 kPa外载荷下的压力分布[125]; (h) RDS微结构在5 kPa外载荷下的压力分布[125]; (i) 具有不同表面微结构传感器的电阻随压力变化的模拟结果[125]
图 5 一种制备工艺: 在金字塔表面涂覆一层PEDOT:PSS薄膜, 电路模型用于推导传感器的传感原理, 它依赖于金字塔的几何形状对压力的响应的变化[64]; (b) 金字塔结构传感器在拉伸时的压力响应及其线性压力灵敏度[64]; (c) 具有不同表面形貌的单一微凸体结构的压力传感原理示意图[32]; (d) 对压力进行响应时的相对电流变化[32]; (e) 压力作用下不同微结构的有限元建模分析[124]; (f)传感器单元的接触面积随压力的变化[124]; (g) 不同几何形状结构: 金字塔、半球、纳米线等在5 kPa外载荷下的压力分布[125]; (h) RDS微结构在5 kPa外载荷下的压力分布[125]; (i) 具有不同表面微结构传感器的电阻随压力变化的模拟结果[125]Figure5. (a) Fabrication process showing a processing step that is first introduced: a PEDOT:PSSthin film coating the pyramid surface.Circuit model used to derive the sensing principle of the sensor, which relies on the change of the pyramid’s geometry in response to pressure[64]; (b) pressure responses of pyramid-structured sensors when stretched and their respective linear pressure sensitivities[64]; (c) a schematic illustration of the pressure-sensing principle of single microstructured e-skins with different surface morphologies[32]; (d) relative current changes in response to normal pressure[32]; (e) FEM analysis of different microstructures under pressure[124]; (f) contact area of a sensor cell as a function of pressure[124]; (g) the pressure distribution of the simulation results for different geometries: pyramid, hemisphere, nanowire at an external loading pressure of 5 kPa[125]; (h) the pressure distribution of the simulation results for RDS microstructure at an external loading pressure of 5 kPa[125]; (i) the simulation results of resistance variation versus applied pressure for different surface microstructures[125].
通过增加形变时的接触面积来增加灵敏度的其他微结构, 还包括使用半球状结构、柱状结构、无规则结构等. 例如Park等[32]以多壁碳纳米管/聚二甲基硅氧烷(MWNT/PDMS)复合薄膜为传感活性材料, 平整的氧化铟锡(ITO)薄膜作为接触电极制备了具有平面结构(planar structure)、半球状结构(microdome structure), 金字塔结构(micropyramid structure)和柱状结构(micropillar structure)的柔性压阻式压力传感器(图5(c)). 在低压(< 1 kPa)范围内半球状结构、金字塔结构和柱状结构的灵敏度从大到小分别为18.3, 12.6, 5.3 kPa–1, 均远高于平面结构0.5 kPa–1(图5(d)). 这是由于柱状结构和平面结构虽然与电极接触面积较大, 但施加压力前后, 接触面积无明显变化导致了较低的灵敏度. 而半球状结构与金字塔结构相比, 虽然在给定的施加压力下半球状结构承受的应力较小, 但接触面积变化较大. 因此, 半球状结构比同等大小的金字塔具有更高的灵敏度.
Peng等[124]则在织构化的PDMS薄膜上喷涂一层导电碳纳米纤维(CNFs), 设计了一种基于金字塔结构(pyramid)、半球状结构(semisphere)和半圆柱体结构(semicylinder)的超灵敏柔性压阻式压力传感器. 三种微结构设计在压缩载荷下的电阻变化表明, 微半圆柱型传感器的灵敏度最高, 为–3.6 kPa–1. 有限元建模分析表明, 在三种微结构设计中, 微半圆柱在相同压力下接触面积变化最大, 与相同压力下电阻变化最大的实验结果一致(图5(e)和图5(f)). Pang等[125]以砂纸为模板设计了一种具有棘层微结构的柔性压阻式压力传感器(图5(h)). 在0—2.6 kPa的线性范围内, 具有无规分布棘层(RDS)微结构的石墨烯压力传感器的灵敏度高达25.1 kPa–1(图5(i)). 与具有金字塔、半球状等结构的器件相比具有更优越的综合性能(图5(g)).
在单一微凸体结构基础上, 众多研究以增加接触面积为核心构建了复合微凸体结构以进一步提高传感器灵敏度. 例如Ko等[48]以碳纳米管和聚二甲基硅氧烷(PDMS)的复合材料作为活性层材料, 制备了具有互锁型微结构的柔性压阻式压力传感器(图6(a)). 这种互锁型微结构在加载压力时, 在接触点处引起应力集中和微腔局部变形, 使得互锁微穹阵列之间的接触面积显著增大并影响接触点处的隧穿电阻. 相对于平面结构和单一的半球形结构而言, 互锁型微结构有效的提高了传感器的灵敏度(图6(b)). 基于相同的设计原理, Shen等[126]设计了一种Ti3C2纳米片与天然微囊体混合的生物复合材料薄膜, 其作为传感层夹在弹性高分子层中间做成柔性压力传感器(图6(c)). 在海胆状微囊体形成的特殊互锁结构中, 外力刺激引起生物复合膜形变, 接触面积不断增大, 因而压力传感器具有较高的灵敏度, 可以用于检测静压强和大范围的人体运动(图6(d)).
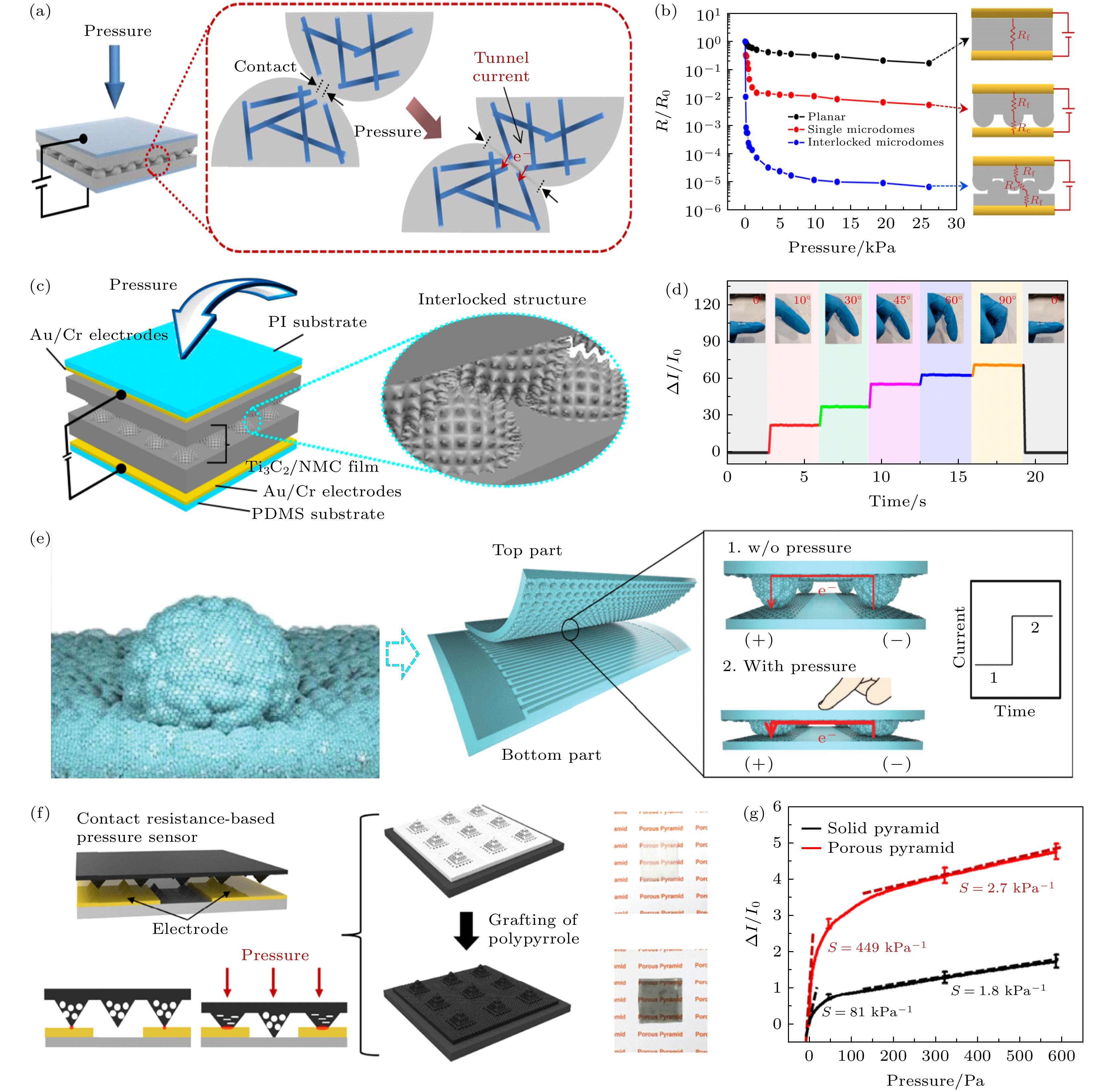 图 6 (a)简述了电子皮肤的工作原理. 外部压力集中应力在接触点, 使互锁型微结构变形, 从而导致接触面积和隧穿电流的增加[48]; (b) 质量分数为8%碳纳米管的不同传感器结构的压力敏感性比较: 平面型(黑色)、半球型(红色)和互锁型微结构(蓝色)[48]; (c) 具有互锁结构的Ti3C2/天然微囊体生物复合薄膜柔性传感器示意图[126]; (d) 手指不同角度弯曲时, Ti3C2/天然微囊体柔性传感器的相对电流变化[126]; (e)分层结构的石墨烯/PDMS的单个结构图像, 传感器组装的示意图及压力传感器的工作原理[99]; (f)基于PPy接枝多孔金字塔介质层的压力传感器结构[65]; (g)基于PPy接枝多孔/固体金字塔介质层的压力传感器的电流随压力变化关系[65]
图 6 (a)简述了电子皮肤的工作原理. 外部压力集中应力在接触点, 使互锁型微结构变形, 从而导致接触面积和隧穿电流的增加[48]; (b) 质量分数为8%碳纳米管的不同传感器结构的压力敏感性比较: 平面型(黑色)、半球型(红色)和互锁型微结构(蓝色)[48]; (c) 具有互锁结构的Ti3C2/天然微囊体生物复合薄膜柔性传感器示意图[126]; (d) 手指不同角度弯曲时, Ti3C2/天然微囊体柔性传感器的相对电流变化[126]; (e)分层结构的石墨烯/PDMS的单个结构图像, 传感器组装的示意图及压力传感器的工作原理[99]; (f)基于PPy接枝多孔金字塔介质层的压力传感器结构[65]; (g)基于PPy接枝多孔/固体金字塔介质层的压力传感器的电流随压力变化关系[65]Figure6. (a) Schematic showing the working principle of the electronic skin. The external pressure concentrates stress at the contact spots, deforming the microdomes, which in turn causes an increase in the contact area and the tunneling currents[48]; (b) the comparison of pressure sensitivities of different sensor structures for 8 wt%: planar (black), microdome (red), and interlocked microdome (blue)[48]; (c) schematic illustration of the Ti3C2/NMC biocomposite film-based flexible sensors with interlocked structure[126]; (d) relative current change of Ti3C2/NMC flexible sensor in response to various angle bending[126]; (e) image of the individual structure of hierarchically structured graphene/PDMS Array, and schematic illustration of sensor assembly and operating principle of the pressure sensor[99]; (f) schematic of contact resistance-based pressure sensor based on PPy-grafted porous pyramid dielectric layer[65]; (g) relative change in current versus pressure ofthe contact resistance-based pressure sensor based on PPy-grafted porous pyramid dielectric layer and solid pyramid dielectric layer[65].
在单一微凸体结构表面形成褶皱型接触, 增加活性材料的粗糙程度形成分级结构也是进一步提高柔性压阻式压力传感器灵敏度的有效方法. 例如Bae等[99]通过热氧化刻蚀的方法制备了PDMS表面覆盖有单层石墨烯的分级结构. 这种分级结构具有较大的粗糙程度并拥有众多的突起形貌(图6(e)). 随着压力的增加, 接触的突起数量和接触面积同时增加. 而没有任何附加分级结构的光滑半球形结构在施加压力产生变形时, 接触面积远小于具有分级结构的传感模型, 其灵敏度(2 kPa–1)也远小于具有分级结构传感器(8.4 kPa–1).
一般而言, 在活性层材料中添加空隙, 因空气对变形无有效的抵抗作用, 可以使其在一定的压力下更容易变形. 因此通过设计具有多孔结构的复合微凸体, 也可以构建高灵敏度的柔性压阻式压力传感器. Yang等[65]在具有多孔金字塔结构的PDMS上沉积了导电聚合物聚吡咯(PPy)作为活性层材料(图6(f)). 由于多孔金字塔结构使得传感器压缩模量较低, 随着施加压力的增大, PPy与电极之间的接触面积增大, 从相对电流随压力变化的曲线图可以看出, 在低压力范围内具有多孔金字塔结构的传感器灵敏度(449 kPa–1)比具有实心金字塔结构的传感器(81 kPa–1)大得多(图6(g)).
柔性压阻型压力传感器不仅需要良好的导电性, 还应具有优良的机械弹性和高压缩性. 具有三维多孔结构的导电海绵或气凝胶因其质量轻、多孔的层次结构和独特的电学性能等优点成为进一步优化柔性压阻型压力传感器传感性能的理想选择[84,127-132]. 根据制备工艺的不同, 三维多孔结构的设计方法可以分为弹性体模板法和基于纳米材料的冷冻干燥法. 弹性体模板法是一种简单、直接、高效的三维多孔结构设计方法. 直接在弹性体聚合物三维多孔结构上沉积一层导电材料制备的柔性压阻型压力传感器, 能够保持低模量高分子弹性体良好的弹性. 例如Luo等[98]通过常压化学气相沉积工艺在镍泡沫上生长了三维石墨烯网络, 然后引入弹性模量可控的PDMS基体浸润包覆石墨烯-镍泡沫, 最后利用盐酸(HCl)刻蚀掉Ni, 最终得到以PDMS为弹性体模板的石墨烯-PDMS空心结构. 该压力传感器在60 kPa的线性范围内, 传感器的灵敏度达到15.9 kPa–1, 并且具有快速响应时间(1.2 ms)和高稳定性(图7(a)). Yue等[127]选择孔隙率在97%以上、孔径为30—130 μm的三聚氰胺海绵作为模板. 由于海绵的多孔结构, 它表现出良好的压缩性能, 在压缩到体积的95%以上后可完全恢复到初始状态. 然后将三聚氰胺海绵浸泡在MXene溶液中, 让二维的纳米片能够很好地锚定在海绵上, 并将其应用于以绝缘聚乙烯醇纳米线作为间隔材料的压阻式传感器中(图7(b)), 这种传感器具有宽压力范围、高灵敏(小于5.37 kPa区域的灵敏度为147 kPa–1, 在5.37—18.56 kPa时的灵敏度区域为442 kPa–1), 以及超过1万次循环的优异耐久性等特点(图7(c)).
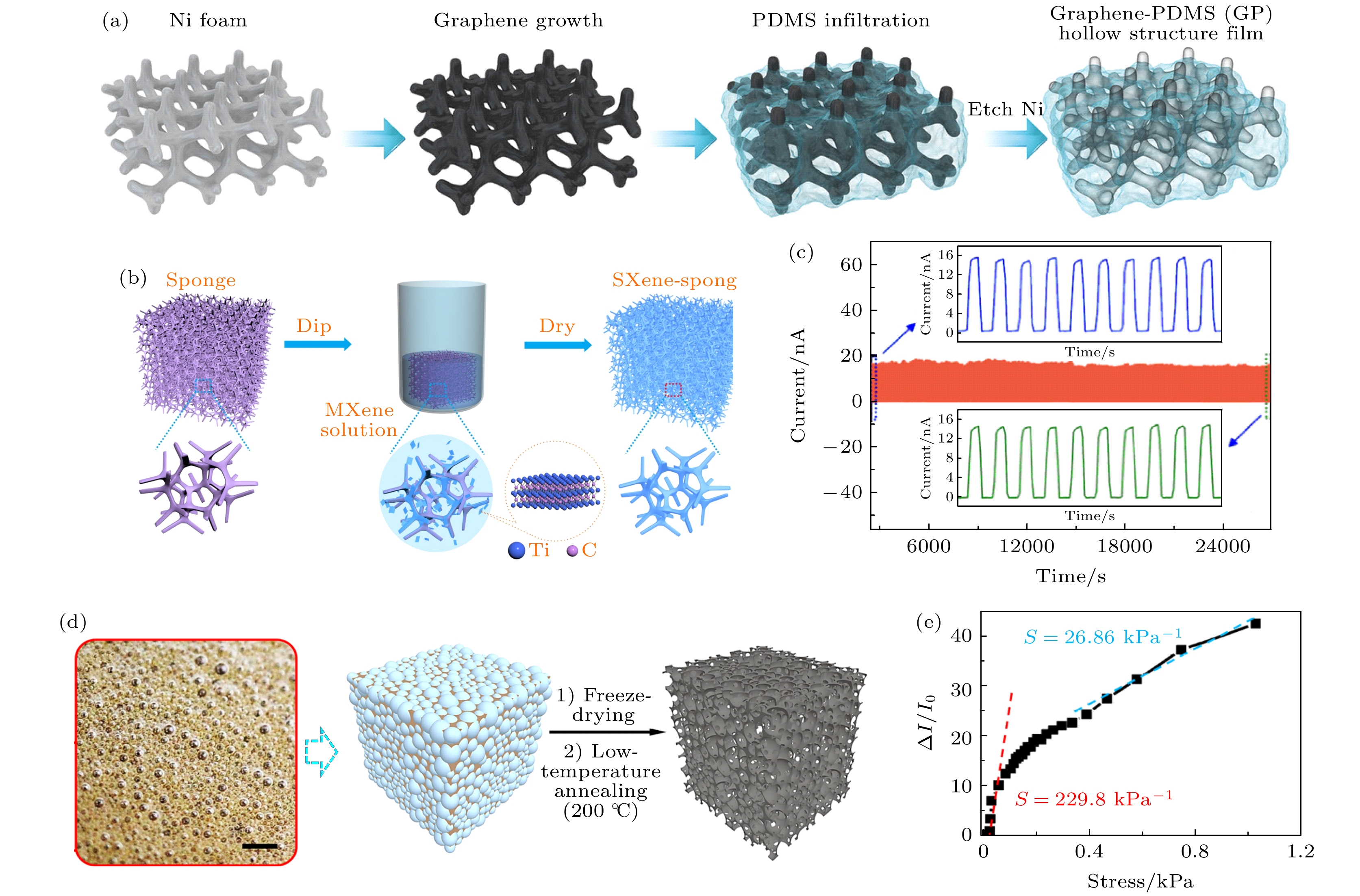 图 7 (a) 具有中空结构的石墨烯复合材料的制备工艺[98]; (b) MXene基海绵的制备工艺[127]; (c) 加载-卸载1万次循环的MXene基压力传感器的稳定性能[127]; (d)发泡石墨烯传感器的制备说明[128]; (e) 发泡石墨烯传感器的压力-响应曲线[128]
图 7 (a) 具有中空结构的石墨烯复合材料的制备工艺[98]; (b) MXene基海绵的制备工艺[127]; (c) 加载-卸载1万次循环的MXene基压力传感器的稳定性能[127]; (d)发泡石墨烯传感器的制备说明[128]; (e) 发泡石墨烯传感器的压力-响应曲线[128]Figure7. (a) Fabrication process of hollow-structured graphene composite[98]; (b) schematic illustration of fabrication procedure of MXene-sponge[127]; (c) stability performance of the pressure sensor with loading-unloading 10000 cycles[127]; (d) illustrations for the preparation of sparkling graphene block[128]; (e) pressure-response curve for the sparkling graphene block[128].
基于纳米材料的冷冻干燥法是指纳米材料中的溶剂在减压作用下直接从固相升华到气相的脱溶剂过程. 在冷冻过程中, 纳米材料被浓缩和包裹在溶剂晶体边界. 随着晶体的生长, 晶体膨胀使纳米材料被锁定在三维网络中. 溶剂升华完全后就可以得到三维多孔结构. 通过控制冷冻干燥工艺条件(溶剂体系、冷冻方向、冷冻速率、干燥速度等)可以调节三维多孔结构的孔径和尺寸分布, 从而达到优化柔性压阻型压力传感器传感性能的目的[133,134]. 例如Lv等[128]利用冷冻干燥法制备了一种气泡超轻型石墨烯压阻型压力传感器(图7(d)). 所获得的石墨烯三维多孔结构即使在95%的压缩应变下也表现出优异的弹性, 并以具有超快的速度(1085 mms–1)反弹回复. 由于内部高度空腔分支化的结构, 其压力灵敏度达到了229.8 kPa–1, 远高于其他石墨烯材料(图7(e)). Xiao等[129]利用冷冻干燥法制备了氧化石墨烯气凝胶, 在此基础上将甲基三乙氧基硅烷沉积到氧化石墨烯气凝胶中, 制备了硅烷偶联剂交联改性石墨烯气凝胶. 改性后的石墨烯气凝胶具有超高的压缩恢复能力(99.5%), 较高的能量损失系数和循环稳定性. 此外, 由于相邻石墨烯片层之间的作用力增强使器件电阻对外加压力高度敏感, 因此获得了高灵敏度(–67.1 kPa–1)和低检测限(< 30 Pa).
通过对活性层材料进行微结构设计可以提高传感器的传感性能, 但在已有微结构设计类型基础上如何进一步提高传感器的传感性能将面临更严峻的挑战. 一方面, 需要在增加形变时提高单一微凸体结构的接触面积来增加器件的灵敏度. 单一微凸体结构的设计方法主要包括光刻模板法[32]、砂纸模板法[112]等, 为了进一步增加微凸体结构的接触面积, 研究人员利用仿生模板法制备了具有多层级的复合微凸体结构, 例如以玫瑰花瓣表面[135]或者荷叶表面[18]为模板制备多尺度、多层次的微凸体结构, 极大的增加了活性层材料表面的粗糙层度及褶皱程度. 实际上, 天然的微纳米结构在我们的身边无处不在, 仿生模板法将是一种十分便捷有效的结构优化方法. 除此之外, 通过多角度控制传感层层数、电导率及厚度也将是未来实现理想线性特性传感器的方向. 另一方面对三维多孔结构进行分级处理可以有效提高柔性压阻式压力传感器的灵敏度和传感范围. 例如将3D打印技术与三维多孔结构的设计相结合制备均匀的分级多孔结构[136], 在压力加载下不同层级的多孔结构之间会有更大的接触面积, 导致接触电阻减小. 同时, 多孔结构中的纳米颗粒组分被更紧密地包复, 增强了导电通路.
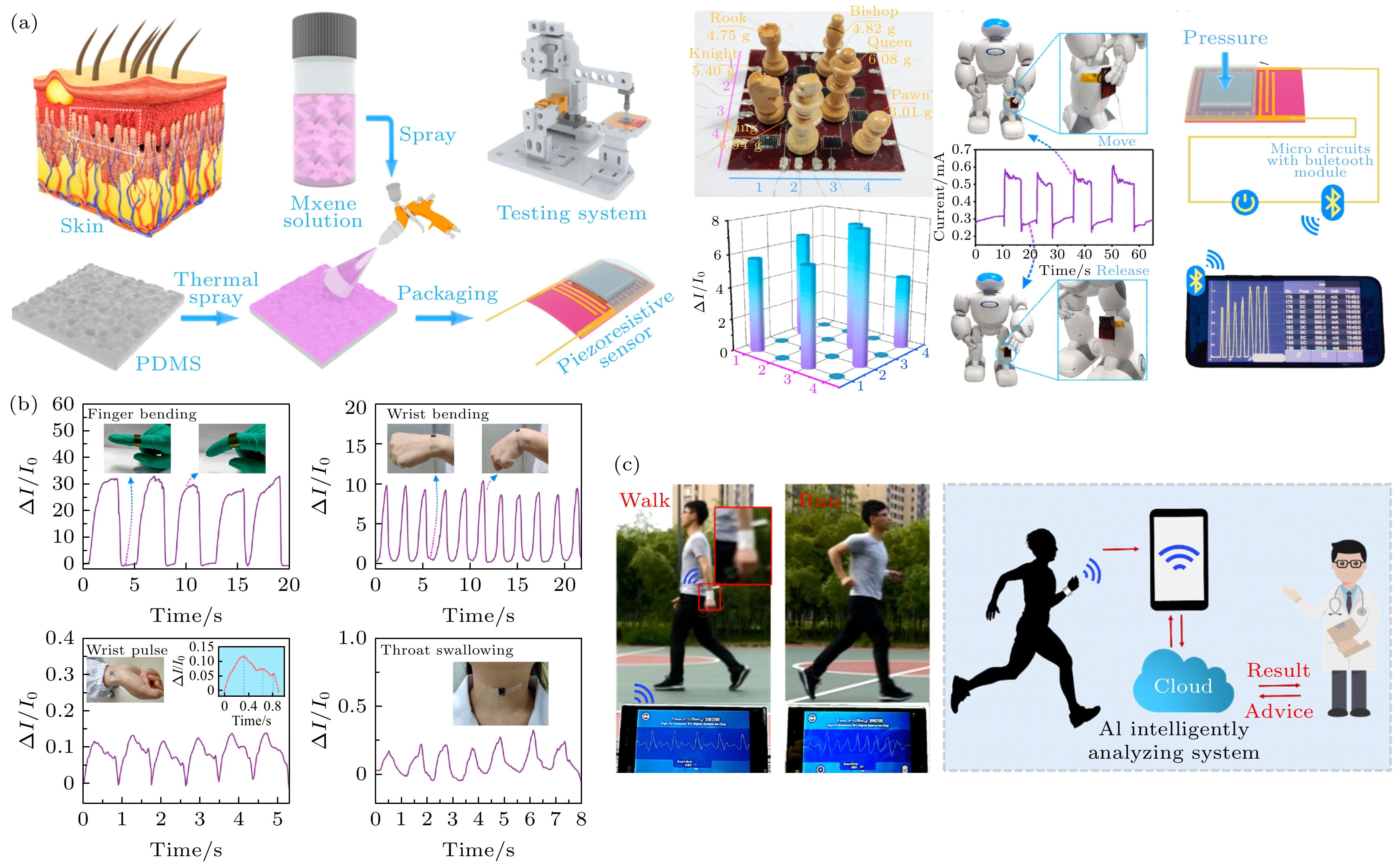 图 8 (a)“MXene基仿生皮肤”的设计与组装[67], MXene基压阻传感器阵列及相应压力分布的检测, 压力传感器用于检测机器人运动行为; (b)信号以电流变化的形式响应来自弯曲手指、弯曲手腕、腕部脉搏、吞咽动作等[67]; (c)无线健康监测系统在行走和跑步过程中的应用图像[29]
图 8 (a)“MXene基仿生皮肤”的设计与组装[67], MXene基压阻传感器阵列及相应压力分布的检测, 压力传感器用于检测机器人运动行为; (b)信号以电流变化的形式响应来自弯曲手指、弯曲手腕、腕部脉搏、吞咽动作等[67]; (c)无线健康监测系统在行走和跑步过程中的应用图像[29]Figure8. (a) Design and assembly of piezoresistive sensors with bionic spinous microstructure, photograph of the array of MXene-based piezoresistive sensor and detection of the corresponding pressure distributions, and photograph of the pressure sensor assembled on a robot and detection of its response to the motion behavior[67]; (b) the signal responses in the form of current changes come from finger bending, wrist bending, wrist pulse, throat swallowing[67]; (c)image of wireless health monitoring system applied during the process of walking and running[29].
尽管柔性压阻式压力传感器的研究取得了长足的进展, 但仍应探索新的传感机制和微结构设计类型, 以开发出综合性能更加优异的压力传感器. 目前来看, 如何同时实现柔性压力传感器的高灵敏度和大压缩范围等性能问题还亟待解决. 此外, 柔性压力传感器在人体上或者恶劣的环境下的实际应用受到较大限制, 所以研制更加环境友好的传感器是未来的研究重点.
随着研究的深入, 将赋予柔性压力传感器更多的功能, 包括自愈合和生物兼容性等. 未来的主要问题是如何将多种传感功能和电源集成到一个单一的技术器件中, 比如开发类似人类皮肤的多功能集成系统, 需要将多种电子元件和传感器集成到微小的软基板上, 从而需要大面积、低成本的集成和制造技术. 同时多功能化的传感器将产生大量电信号信息, 如何收集和维护这些数量庞大的信号, 以及如何保证集成式传感器的功能性和长期稳定性还需要进一步探讨. 因此, 多功能柔性压力传感设备将成为下一代可穿戴应用的主流.
