全文HTML
--> --> -->自2006年以来, 基于氧化锌(ZnO)纳米线的纳米发电机的首次出现证明了其能够将机械能有效地转化成电能, 引起了研究人员极大地关注. 随后多种纳米发电机被开发出来[4]. 其中最具代表性的是摩擦纳米发电机(TENG)与压电纳米发电机(PENG). 二者分别基于摩擦起电效应与压电效应的原理来实现机械能对电能的转化, 可作为自驱动传感器研究的基础, 即自身在机械形变作用下能够产生电信号, 响应环境刺激, 不需要配置电源.
作为在很多可穿戴电子设备设计基础的触觉传感器, 在功能上可实现如压力及分布、应变、剪切力和滑动等检测[5-7]. 利用纳米发电机可以将机械能转化为电能的特性, 将纳米发电机制备技术与触觉传感器设计相结合, 可以制备出具有自驱动功能的柔性触觉传感器, 可以实现人工智能及生物医学等诸多领域的应用. 同时, 近年来纳米科技的发展, 也为该类型传感器实现高性能、新功能、拓展新应用领域提供了理论基础与技术支持, 如: 利用微纳加工技术实现高灵敏、优异检测极限的触觉传感, 以及利用纺织技术实现新型可穿戴器件的制备等[8,9].
本文将从三个方面对基于纳米发电机的柔性触觉传感器领域研究进行总结, 即: 纳米发电机的基本原理, 纳米发电机的设计与性能优化, 基于纳米发电机的触觉传感器设计及在柔性可穿戴电子设备中的研究与应用. 最后, 将结合这些研究的新进展, 展望该领域的新挑战及未来的发展方向.







2
2.1.TENG的工作机理
TENG工作机理是基于摩擦起电和静电感应之间的耦合效应. 当两种不同极性的材料接触时, 由于材料对电子束缚能力不同, 导致电荷的转移[11]. 当两种材料发生移动时, 接触界面产生的电势差会驱动电子在材料的背电极之间移动, 外部运动产生的机械能转化为电能并产生电信号[12]. 以接触分离模式为例, 使用介电常数和厚度分别为








TENG共分为四种工作模式. 1)垂直接触分离模式: 两种不同极性的材料及两个背电极组成, 如图1(a)所示. 在外部压力的作用下, 两种材料相互接触, 由于材料极性的不同, 这将会在材料的表面产生相反的电荷. 当撤去压力后两种材料分开而产生内部电势, 在电势差的作用下, 电子将被驱动而在外电路中移动; 当材料再次接触时, 电势差消失, 电子反向流动[14-16]. 2)横向滑动模式: 横向滑动模式与垂直接触分离模式结构相似, 如图1(b)所示. 唯一的区别在于垂直分离模式要求两种材料在垂直方向上分离, 而横向滑动模式要求两种材料在平面内方向分离. 与垂直接触分离模式相比, 横向滑动可以通过结构高频运行, 有利于实现高效输出[17-19]. 3)单电极模式: 如图1(c)所示, 单电极模式的TENG与其他类型的纳米发电机不同, 只有一个电极, 可以通过外部物体如人体皮肤等作为摩擦层. 当外部物体移动时, 电流将会在电极和摩擦层流动[20-22]. 4)自由摩擦层模式: 自由摩擦层模式是由两个分离的介电摩擦层和一个自由摩擦层组成, 如图1(d)所示. 摩擦层进行摩擦电预处理, 当其接近或者离开介电层时将会导致电荷的非对称分布, 该过程使得电子从一个电极流向另一个电极, 以平衡电势分布. 该工作模式的理论转化效率可以达到100%, 并且损耗极低[23-25].
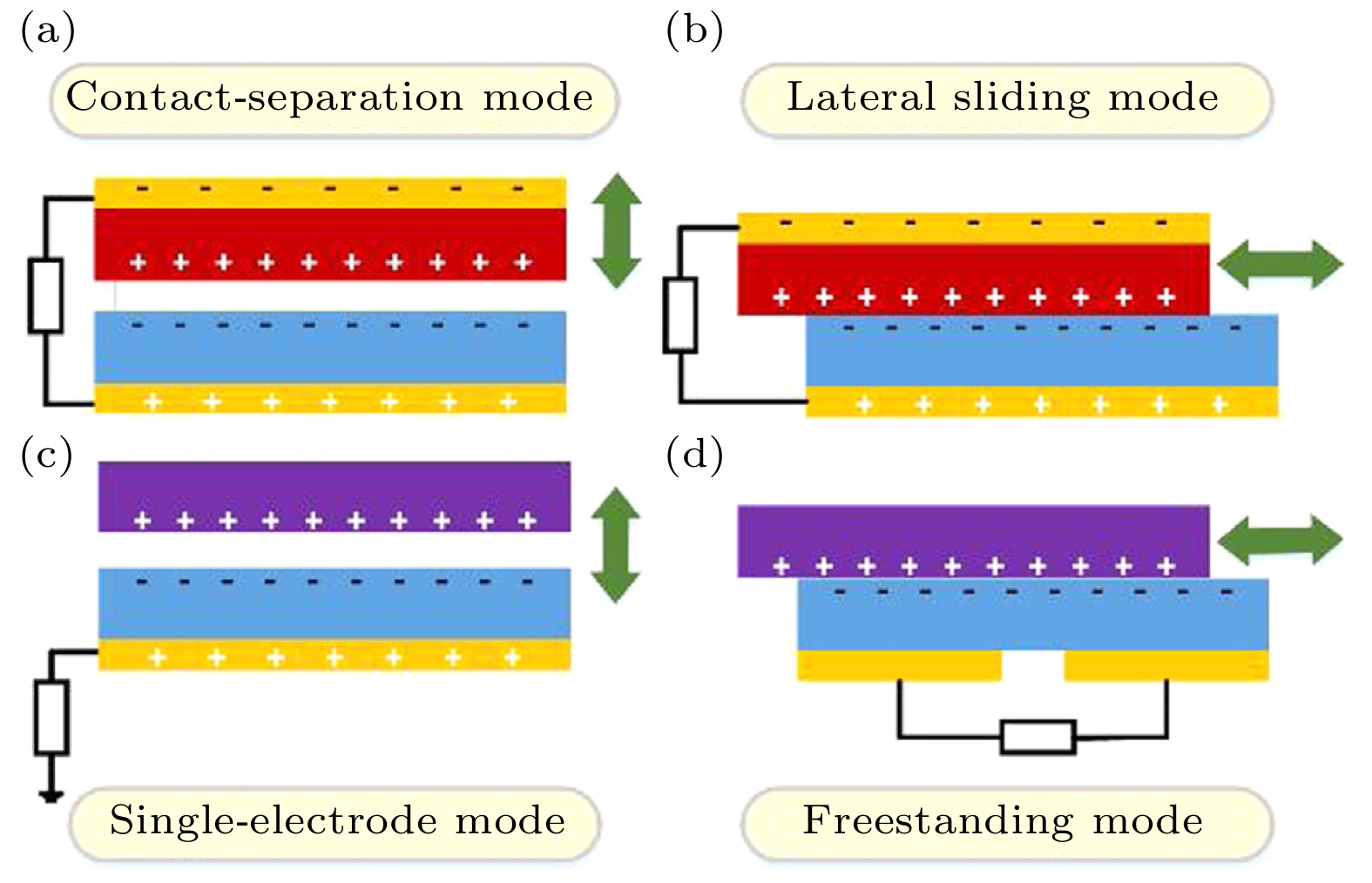 图 1 摩擦纳米发电机的工作机理与四种工作模式[26] (a)接触分离模式; (b)滑动摩擦声式; (c)单电极模式; (d)自由摩擦层模式
图 1 摩擦纳米发电机的工作机理与四种工作模式[26] (a)接触分离模式; (b)滑动摩擦声式; (c)单电极模式; (d)自由摩擦层模式Figure1. Working mechanism and four working modes of triboelectronic nanogenerator[26]: (a) Contact-separation mode; (b) lateral sliding mode; (c) single-electrode mode; (d) freestanding mode.
2
2.2.压电纳米发电机的工作机理
压电纳米发电机的工作原理是基于材料受到压力时在两个端面出现电势差驱动外部电路中的电子迁移, 实现机械能与电能之间的转化[27,28]. 以氧化锌(ZnO)为例. 如图2(a)显示了沿c轴累积的四面体配位的Zn2+和O2–. 在初始状态下(图2(b)), 正电荷中心和负电荷中心重合, 当在施加外部应力产生形变时, 阴离子和阳离子的电荷中心会分离, 从而产生电势差[29]. 若表面上的压电极化电荷密度为


 图 2 ZnO的压电机理[30] (a) ZnO原子模型示意图; (b) ZnO在压缩和拉伸下的极性变化示意图
图 2 ZnO的压电机理[30] (a) ZnO原子模型示意图; (b) ZnO在压缩和拉伸下的极性变化示意图Figure2. The working principle of piezoelectric nanogerator[30]: (a) Schematic of ZnO atom model; (b) schematic of working mechanism of piezoelectric nano-generator under compression and tension.

位移电流是在纳米发电机内部所产生的电流. 在没有施加外部电场的情况下, 位移场是介质中极化场密度

对于外电路而言, 压电纳米发电机的开路电压为

2
3.1.材料选择与性能优化
结合在柔性可穿戴设备中的实际应用, 器件的材料选择在满足器件基本性能的基础上, 还应具有可拉伸性、透明性、自愈合性和生物相容性等特点. 目前研究广泛的柔性导体材料主要是将金属纳米线(NW)、金属纳米颗粒(NP)、碳纳米管(CNT)和石墨烯等导电填充料或聚合物嵌入弹性体聚合物基材中制备的导电弹性体[31-35]. 这种导电弹性体可以作为制备TENG自驱动触觉传感器的电极的材料. 近年来有一些生物相容性材料用于TENG, 例如丝素蛋白等[36,37]. 基于PENG触觉传感器的功能材料主要以ZnO、锆钛酸铅(PZT)、聚偏氟乙烯(PVDF、PVDF-TrFE)等其他压电体材料嵌入弹性体聚合物基材中制备的压电弹性体为主, 也有的将压电材料直接制备在弹性体基材上, 如: 聚二甲基硅氧烷(PDMS)、聚对苯二甲酸乙二酯(PET)、聚四氟乙烯(PTFE)等弹性体基材, 作为PENG的主体材料[38-41].2
3.2.主体结构层的设计与优化
纳米发电机的性能与接触表面的电荷密度成比例, 电荷密度的平方是量化纳米发电机性能的主要参数, 所以增加电荷产生一直是提高输出功率的主要策略[42-44]. 从材料的设计出发主要有两种方式: 一种是材料表面的微结构化, 另一种是材料的功能化. 材料的微结构化可通组装胶体阵列[44]、软光刻[45]、嵌段共聚物组件[42]和表面纳米材料制造[46]等手段来实现, 该方法不仅可以增加两种接触面积来增强摩擦电或压电效应, 而且可以提高传感器的检测灵敏度、检测极限和检测范围. 如图3(a)所示, Fan等[15]首次展示的TENG压力传感器通过在摩擦层上制造的金字塔状微结构的PDMS膜, 相比非结构膜其性能提升了5—6倍. 2017年Chen等[47]将基于P(VDF-TrFE)/BaTiO3纳米复合材料的压电纳米发电机进行微柱结构化, 使其输出性能相对于原始P(VDF-TrFE)块状薄膜提升了7.3倍, 如图3(b)所示.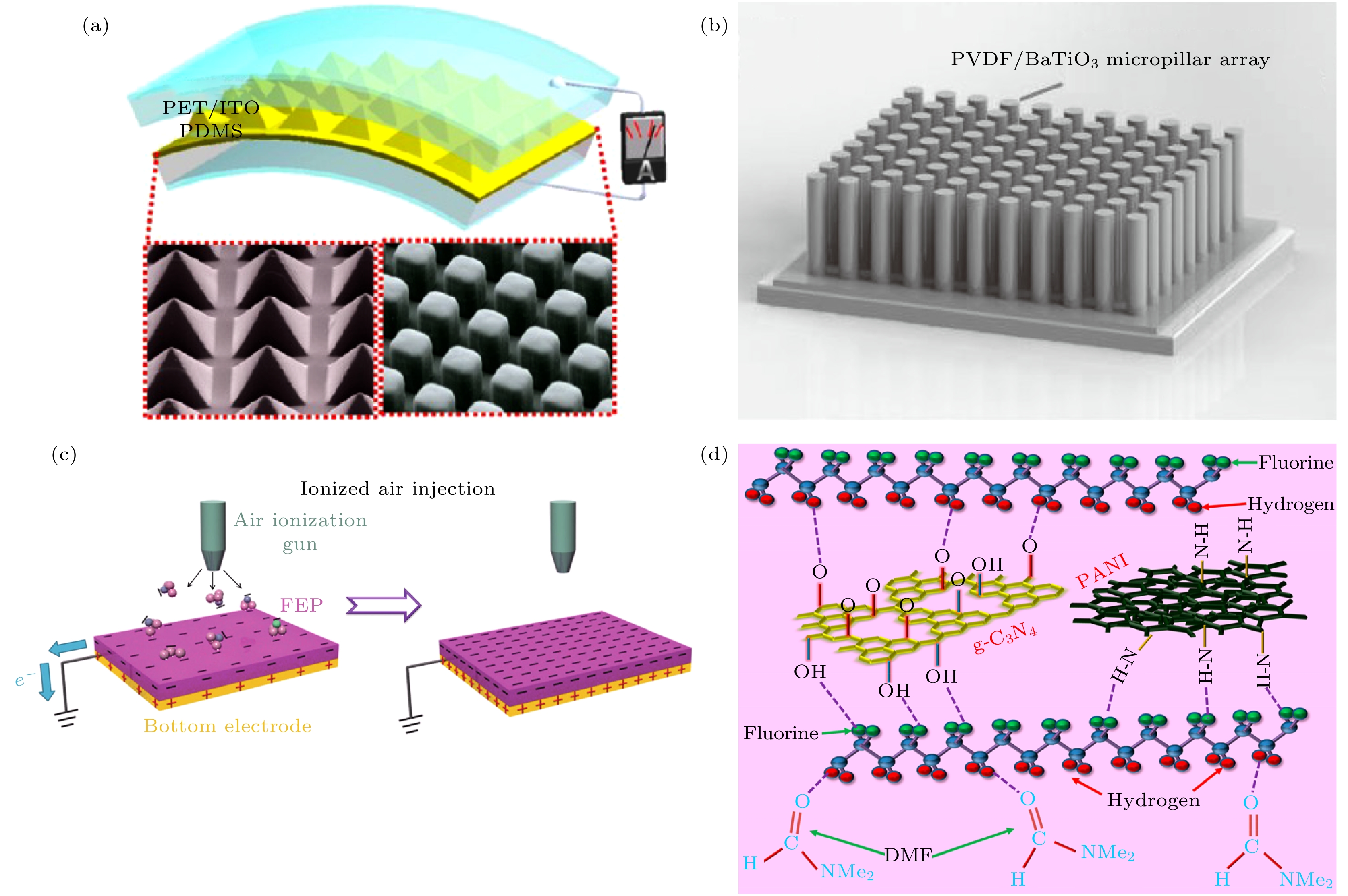 图 3 主体结构层的设计与性能优化 (a)微纳加工技术制备的微金字塔与微柱状结构的TENG的SEM图像[15]; (b)表面具有微柱结构的PENG结构示意图[47]; (c)在FEP表面进行表面极化示意图[55]; (d) gC3N4, PANI纳米棒, DMF和PVDF链之间相互作用机制示意图[48]
图 3 主体结构层的设计与性能优化 (a)微纳加工技术制备的微金字塔与微柱状结构的TENG的SEM图像[15]; (b)表面具有微柱结构的PENG结构示意图[47]; (c)在FEP表面进行表面极化示意图[55]; (d) gC3N4, PANI纳米棒, DMF和PVDF链之间相互作用机制示意图[48]Figure3. Design and performance optimization of the main structure layer: (a) SEM images of micropyramid and microcolumnar TENG prepared by micro-nano processing techniques[15]; (b) schematic diagram of PENG structure with microcolumn structure on the surface[47]; (c) schematic diagram of negative ion implantation on the FEP surface[55]; (d) schematic diagram of the interaction mechanism between gC3N4, PANI nanorods, DMF and PVDF chains[48].
材料的功能化可通过离子掺杂、等离子体处理、电极化、激光诱导及纳米复合物的形成等方法来实现[48-52]. 对于TENG的设计来说, 材料的摩擦电序列表明[53], 不同材料失去电子或者吸引电子的能力不同, 通常可以选用具有最强电负性的氟化物元素作为摩擦材料[54]. 如图3(c)所示, 当氟化乙烯丙烯(FEP)基材暴露于负离子空气中进行表面极化后, 电子从铝到FEP表面的转移大大增加[55]. 对于PENG的设计与材料选择, 2019年Khalifa和Anandhan[48]制备聚苯胺/石墨烯相氮化碳(PANI/g-C3N4)纳米复合材料, 然后将其分散在PVDF中制备可拉伸透明PENG. 进而利用了g-C3N4的β成核活性及各个PVDF纳米纤维内的PANI网络而提高了电导率. 其中gC3N4的羟基与PVDF的氟原子之间的氢键有助于形成β相, 如图3(d)所示. 最终提高PVDF的β相含量(约97%). 与原始的PVDF纳米纤维相比, 电流输出方面显示出显著的改善(约1300%).
2
3.3.电极的优化设计
可穿戴传感器电极的设计应具备柔韧性、可拉伸性、高透明度及优良的导电性等特点. 在实际应用中, 性能优异的电极可以简化器件结构、提升器件性能并扩展应用领域. 碳基材料因为其高电导率, 耐热性等优异的性能受到了研究者们的广泛关注, 而且碳基材料的生物安全性可以避免因金属填充料泄漏等带来的危害. 其中, 石墨烯是近年来的研究热点, 对石墨烯进行功能化可以极大的降低电阻, 提升性能. 2019年Chen等[56]通过调控可拉伸褶皱石墨烯(CG)表面来制备增强型可拉伸TENG, 如图4(a)所示, 其透光性好, 功率密度是普通石墨烯的20倍. 如图4(b)所示, 2017年Yang等[57]制备了一种基于石墨烯复合电极的高性能透明柔性电极, 通过采用导电聚合物PH1000的膜对石墨烯表面进行改性. 其电阻由最初的725 Ω减小到85 Ω, 电流密度可达到2.4 μA/cm2, 功率提升了140%, 很适合作为薄层透明电极. 与此同时, 以水凝胶作为电极的材料因其不仅具有优异的可拉伸性、导电性能和生物相容性, 同时还具备碳基材料没有的自愈合性能, 也受到越来越多的关注[58-64]. 在可穿戴电子设备的应用中, 自愈合材料的应用可以极大地提高器件的使用寿命[65]. 2017年Parida等[66]通过使用PVA弹性体作为离子导体来实现自我愈合的高度透明(92%)和高度可拉伸(700%)的电极. 在完全切割300次后, 该设备可自愈合并保持稳定的输出特性, 如图4(c)所示. 图 4 电极的设计与优化 (a)VHB胶带上的透明及可拉伸双层CG照片[56]; (b)制造的石墨烯/聚合物混合透明电极的照片[57]; (c)具有自愈合功能的可拉伸导体照片[66]
图 4 电极的设计与优化 (a)VHB胶带上的透明及可拉伸双层CG照片[56]; (b)制造的石墨烯/聚合物混合透明电极的照片[57]; (c)具有自愈合功能的可拉伸导体照片[66]Figure4. Design and optimization of electrode: (a) The photo of stretch image and double layer CG transparency on VHB tape[56]; (b) the photo of fabrication of the graphene/polymer hybrid transparent electrode[57]; (c) the photo of stretchable conductor with a self-healing function[66].
2
4.1.压力传感器
压力传感器在是可穿戴设备中应用最为广泛的触觉传感器. 其中, 灵敏度是压力传感器的最重要性能参数. 对于基于纳米发电机的压力传感器, 其灵敏度定义为摩擦电信号或压电信号相对于施加压力曲线的相对变化率. 对于相同的外力作用, 高灵敏度的传感器可以产生较大的信号, 带来更优异的信噪比与检测极限, 使传感器可以检测细微的压力变化, 如呼吸或动脉脉冲相关变化. 2014年Zhu等[67]设计了一种自驱动的传感器(TES), 如图5(a)所示. 其中聚对苯二甲酸乙二醇酯(PET)层作为TES的摩擦层, 两端制备ITO电极形成三明治结构. 进一步在FEP表面制备出均匀的聚合物纳米线(PNWs)进行改性, 极大的提升了其输出性能. 该设备展现了较高的压力灵敏度, 为44 mV/Pa (0.09%·Pa–1), 以及最大触摸灵敏度, 为1.1 V/Pa (2.3%·Pa–1). 基于该器件搭建的无线警报系统, 用手指轻轻按压传感器, 就可以触发报警, 如图5(b)和图5(c)所示. 2020年Fan等[68] 在Science期刊上报道了一种基于TENG的全纺织品传感器阵(TATSA), 如图5(d)所示. 以制备的导电尼龙纱线为传感织物材料, 采用畦编的方法制备出全织物传感器, 压力灵敏度为7.84 mV/Pa, 响应时间为20 ms. 该织物传感器可独立编织成颈带、护腕、袜子和手套, 对脖子、手腕、脚踝和手指等不同身体部位处的脉搏进行检测. 同时, 也可以方便、简单的和衣物编织在一起, 形成具有传感功能的智能服装, 用于呼吸和脉搏的多功能传感. 如图5(e)所示, 研究人员选择不同年龄的80位受试者, 通过与商品化脉搏传感器的输出信号进行对比, 其波形特点完全一致, 可以得出TASTSA在脉搏检测方面具有优异的性能. 同时, 在呼吸监测功能方面, 该器件可以实现睡眠呼吸暂停综合症和心血管疾病的实时、长期监测, 如图5(f)所示. 如图6(a)所示, 2018年Li等[69]通过四氟乙烯-六氟丙烯-乙烯基内脂(THV)/环状烯烃共聚物(COC)制备了基于PENG的柔性压力传感器, 该器件具有较高压力灵敏度(30 mV/kPa, 线性度R2 = 0.99963), 宽检测范围(高达150 kPa). 通过搭建模数转换模块对器件受外力时产生的开路电压进行收集, 可以精确地检测出多种手掌运动时产生的压力大小. 如图6(b)和图6(d)所示将器件装配在食指, 拇指及手掌侧部位置上, 进行轻微的敲击(约10 kPa), 按压(约60 kPa), 重击桌面(约100 kPa)的动作. 将所显示的电压峰值与商用测力计的测量结果进行对比. 证明该压力传感器具有宽压力检测范围和高精度的特点.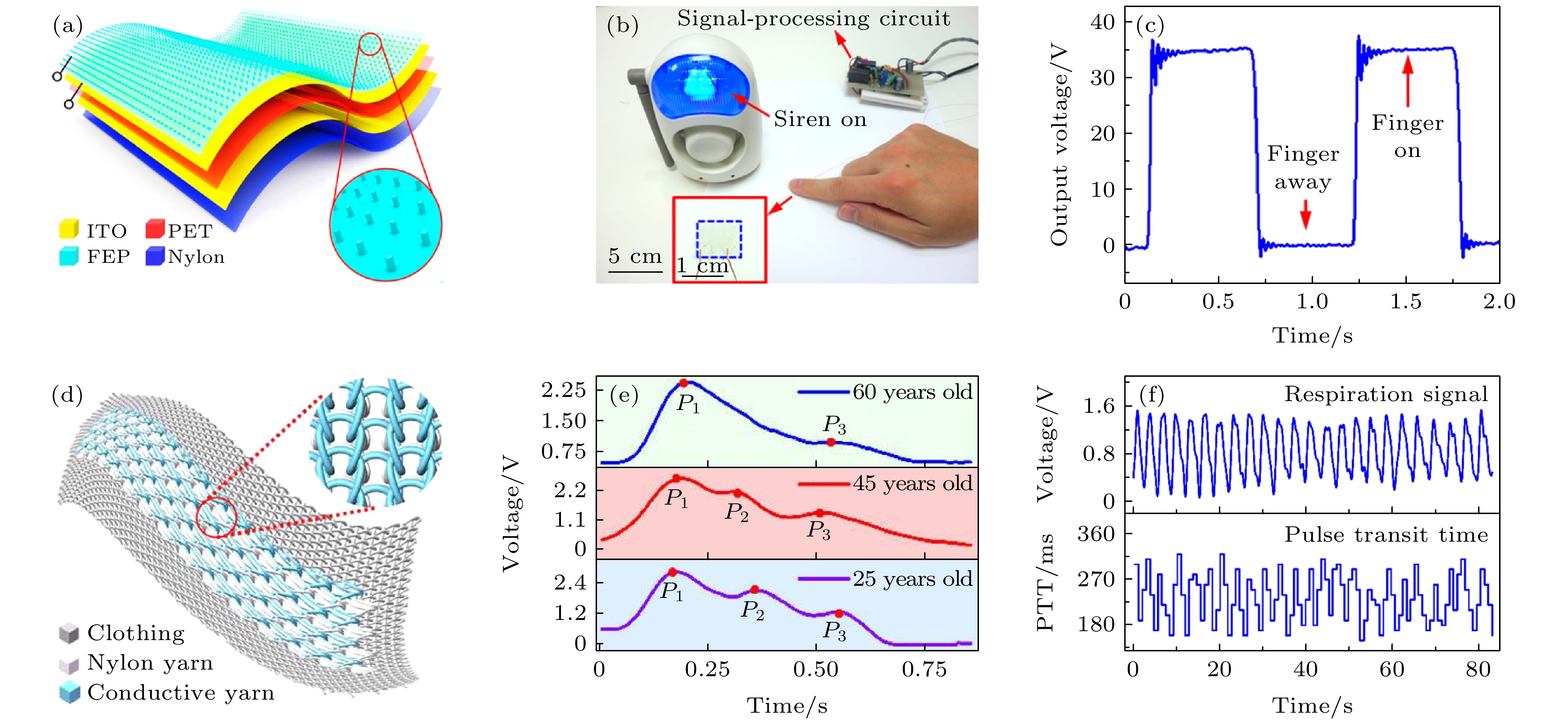 图 5 基于TENG的压力传感器 (a)TES的结构示意图[67]; (b), (c)通过手指按压TES的无线报警系统与实际输出电压[67]; (d) TATSA结构示意图[68]; (e)不同年龄段人群脉搏输出信号[68]; (f)健康参与者的呼吸信号和PTT[68]
图 5 基于TENG的压力传感器 (a)TES的结构示意图[67]; (b), (c)通过手指按压TES的无线报警系统与实际输出电压[67]; (d) TATSA结构示意图[68]; (e)不同年龄段人群脉搏输出信号[68]; (f)健康参与者的呼吸信号和PTT[68]Figure5. The pressure sensor based on TENG: (a) Schematic diagram of TES[67]; (b), (c) press TES wireless alarm system with finger and actual output voltage[67]; (d) schematic diagram of TATSA[68]; (e) pulse output signals of different age groups[68]; (f) respiratory signals and PTT of healthy participants[68].
 图 6 基于PENG的压力传感器[69] (a)TVH/COC压电纳米发电机实物图; (b), (d)食指敲击, 拇指按压, 重击桌面所检测到的压力与商用测力计所对应的压力对比图
图 6 基于PENG的压力传感器[69] (a)TVH/COC压电纳米发电机实物图; (b), (d)食指敲击, 拇指按压, 重击桌面所检测到的压力与商用测力计所对应的压力对比图Figure6. The pressure sensor based on PENG[69]: (a) Physical picture of TVH/COC piezoelectric nanogenerator; (b), (d) the diagram comparing the pressure detected by tapping the index finger, pressing the thumb, and thumping the table with the pressure corresponding to a commercial dynamometer.
2
4.2.应变传感器
基于纳米发电机的自驱动应变传感器可以在外力作用下实现对不同弯曲和拉伸导致的应变力的检测, 并具有优异的柔性可拉伸性能[70], 对基于TENG的应变传感器而言, 在不同曲率下的形变会导致摩擦层接触面积的变化, 从而导致产生的电荷发生改变, 进而可量化成相应的电压、电流或电荷信号输出. 而对于基于PENG的形变传感器, 当材料受到外部应力作用时, 材料表面会发生相应的拉伸或压缩应变, 使压电材料内部产生正负极性相反的极化电荷, 当外力消失, 材料表面的电荷极性又恢复到原来状态, 因此电荷出现两次极性改变, 进而产生交流电信号. 应变传感在人体运动检测(行走、跑步等)及健康监测等方面都有应用潜力[71]. 2017年Jin等[72]研制了基于TENG的自驱动实时运动检测传感器, 将其固定在手上, 选择FEP作为摩擦层, Al薄膜为电极, 由于FEP比Al具有更高的电负性, 因此在二者接触过程中Al表面带正电, FEP表面带负电, 在接触分离过程中将会产生电信号, 如图7(a)所示. 如图7(b)所示, 该设备可以从手指的运动中获取机械能并转化成电信号. 由于手指上部、中部、底部关节与设备的接触面积不同, 在随机的复杂运动情况下, 通过分析信号的大小就可以准确地确定是哪个或者哪几个关节在运动, 如图7(c)所示. 2019年Zou等[73], 在Nature期刊上报道了一种仿电鳗的可拉伸发电机(bionic stretchable nanogenerator, BSNG), 可以用于水下传感与能量收集, 如图7(d)所示. 该工作中研究者模仿电鳗发电器官的细胞膜上的离子通道, 构造了一种机械敏感性的仿生通道, 用于控制发电机内部的起电液体的往复运动, 从而实现电能的转化, 如图7(e)所示. 两种独特的工作模式使得BSNG在液体环境中可以实现超过10 V的开路电压, 在干燥条件下可以实现超过170 V的开路电压. 如图7(f)所示, BSNG由于其出色的柔韧性、可拉伸性、机械响应性和高输出性能等优势, 可用于人体运动监测, 在干燥和液体环境中为新一代可穿戴电子设备提供了一种有前景的替代电源. 2018年Kim等[74]制备了一种基于氮化硼纳米片(BNNS)的PENG自驱动传感器(TFPS). 如图8(a)所示, 该器件具备良好的生物相容性和耐高温性(空气中约800 ℃), 输出功率为40 μW, 能量转化率为12.6%. 其工作原理基于BNNS的压电效应, 对设备施加压力时, 产生拉伸应变, 表面产生正电荷增加; 如图8(b)所示, 当释放压力时, 设备将受到压缩应变, 表面产生相应的负电荷增加, 进而产生交流电信号. 将设备贴合于人体的脚、颈部、腕部和膝盖上, 可以区分和检测相应的机械运动, 如图8(c)所示.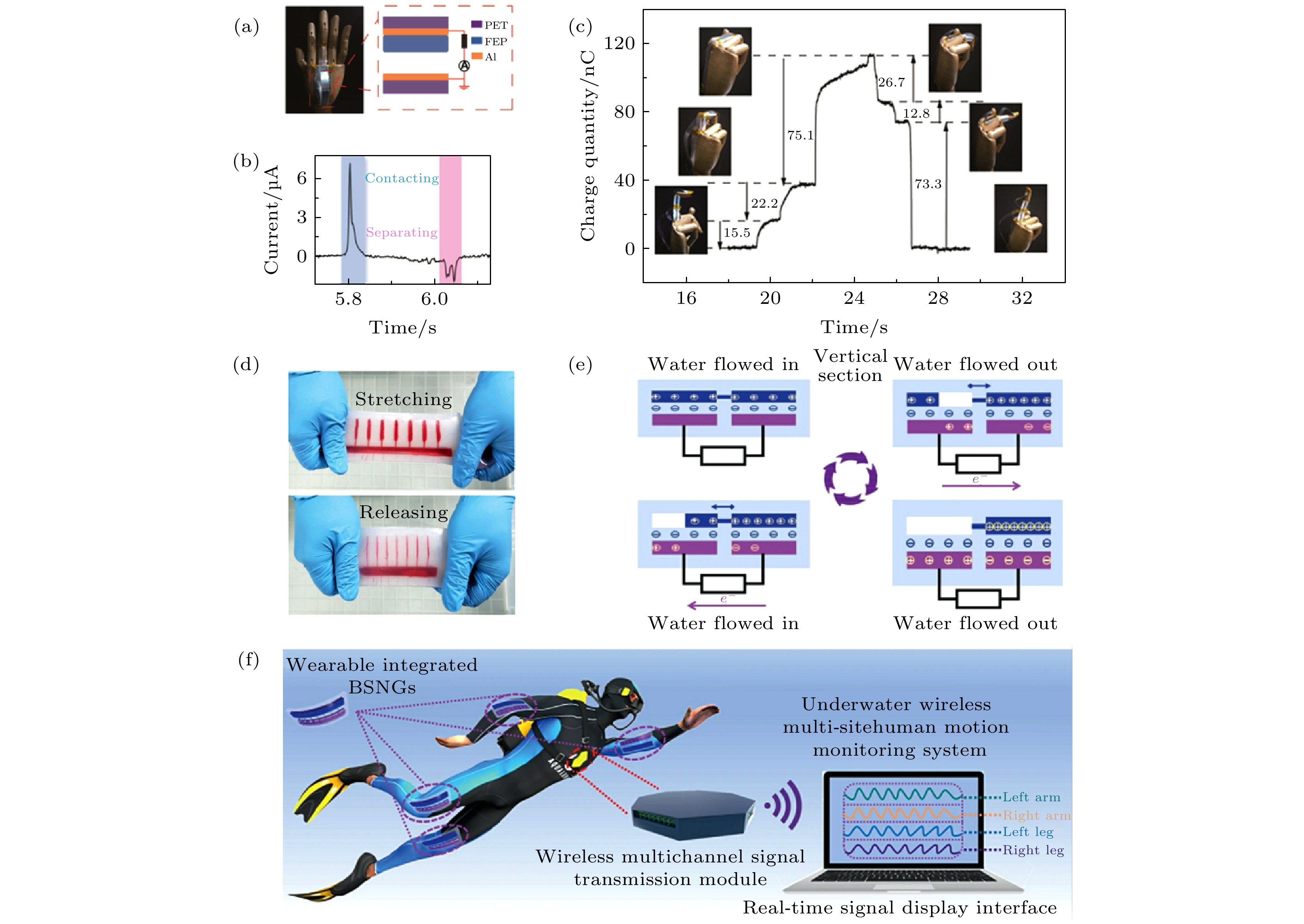 图 7 基于TENG的应变传感器 (a)TENG与机械手结合的的照片与示意图[72]; (b)在一个接触和分离过程中反向电流信号曲线[72]; (c)中指的两个不同随机运动的转移电荷曲线[72]; (d)仿生可拉伸纳米发电机(BSNG)(填充红色墨水)的一个工作周期的照片[73]; (e)BSNG工作机制示意图[73]; (f)基于仿生伸缩性纳米发生器(BSNG)水下无线多站点人体运动监控系统的示意图[73]
图 7 基于TENG的应变传感器 (a)TENG与机械手结合的的照片与示意图[72]; (b)在一个接触和分离过程中反向电流信号曲线[72]; (c)中指的两个不同随机运动的转移电荷曲线[72]; (d)仿生可拉伸纳米发电机(BSNG)(填充红色墨水)的一个工作周期的照片[73]; (e)BSNG工作机制示意图[73]; (f)基于仿生伸缩性纳米发生器(BSNG)水下无线多站点人体运动监控系统的示意图[73]Figure7. Strain sensor based on TENG: (a) Photos and schematic diagram of the combination of TENG and manipulator[72]; (b) reverse current signal during a contact and separation process[72]; (c) the transfer charge curves of two different random motions in the middle finger[72]; (d) a photo of a working cycle of the bionic stretchable nanogenerator (BSNG) (filled with red ink)[73]; (e) schematic diagram of the working mechanism of BSNG[73]; (f) schematic diagram of underwater wireless multi-site human motion monitoring system based on bionic flexible nanogenerator (BSNG)[73].
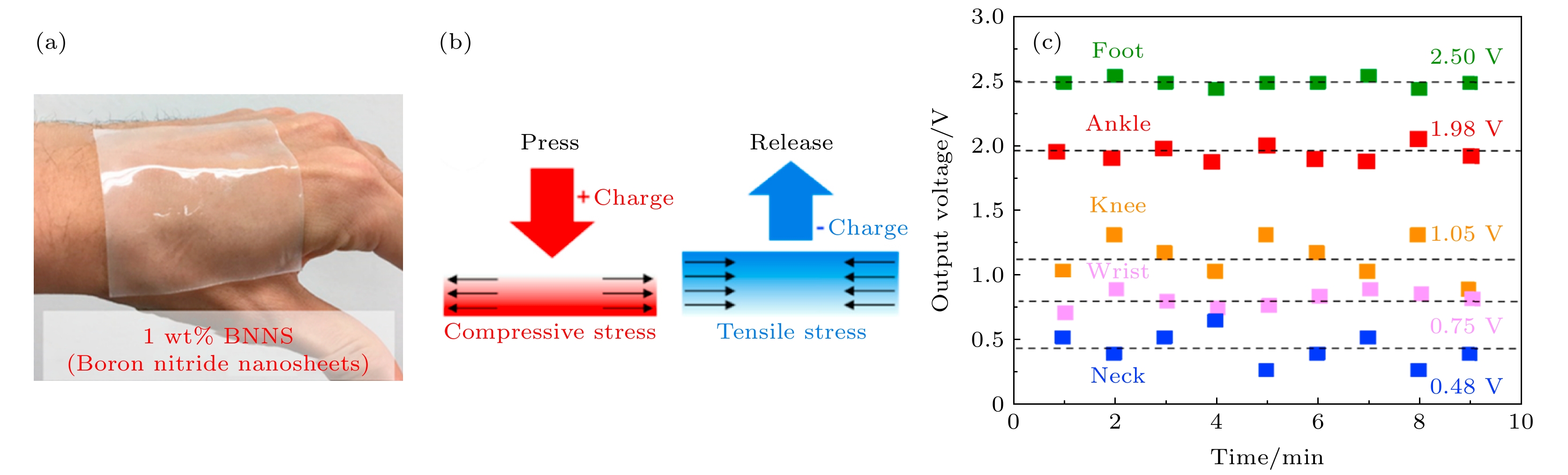 图 8 基于PENG的应变传感器[74] (a)TFPS结构示意图; (b)TFPS工作原理图; (c)多部位运动所对应的电压输出关系图
图 8 基于PENG的应变传感器[74] (a)TFPS结构示意图; (b)TFPS工作原理图; (c)多部位运动所对应的电压输出关系图Figure8. Strain sensor based on PENG[74]: (a) the structure diagram of TFPS; (b) the schematic diagram TFPS operating; (c) the voltage output diagram corresponding to the multi-position motion.
2
4.3.压力分布传感器
压力分布传感器可以精确地分辨出物体施加压力的位置和大小分布, 人机交互中应用中是必不可少的[75-78]. 随着纳米加工技术的发展, 阵列结构中电极的设计由之前的独立寻址变成了行列寻址, 从而优化了传感阵列的空间分辨能力[79,80]. 2016年Wang等[81]开发了一种基于TENG的人机交互触觉传感器件. 在这项研究中, 灵活的自驱动高分辨(5 dpi)传感器矩阵实现了基于单电极模式(SE)TENG的16 × 16与32 × 20像素(TESM)的压力分布传感, 可以实时映射单点和多点触觉刺激. 如图9(a)展示了改传感器的制备流程: 将PDMS膜旋涂在顶部作为摩擦层; PET用作柔性衬底; 沉积制备的Ag电极阵列用作电荷感应元件; 背面电极连接到外部测量设备; 涂有乙烯-乙酸乙烯酯共聚物(EVA)的PET膜被用作封装层. 图9(b)展示了分辨率为5 dpi的16 × 16像素TENG滑动传感器, 每个像素的边长为2.5 mm, 同时采用了一种多通道数据采集方法来实现大规模数据处理和实时触觉成像, 如图9(c)所示, 在单点、双点和多点的触摸感测下, 可以清楚地观察到触摸电极与未触摸电极之间的电信号差别, 证明了多点滑动感测的可行性和有效性. 当通过形状为数字“3”的手指在触觉阵列的顶部施加外力时, 可以根据同时使用的输出电压信号作为映射轮廓来显示所呈现出的像素点, 如图9(d)所示. 近几年基于织物的自驱动可穿戴设备由于其优异的透气性、舒适性、生物相容性符合人体皮肤需求等优点受到了极大的关注. 2020年Ma等[82]通过静电纺丝技术制造了直径约350 μm的超轻纳米微纤维单电极摩擦电纱(SETY). SETY由聚偏二氟乙烯(PVDF)和聚丙烯腈(PAN)杂化纳米纤维作为壳, 导电银丝为核心, 制备成具有纳米-微螺旋纤维束的核-壳结构. SETY的瞬时输出电压和电流可以分别达到40.8 V和0.705 μA·cm–2. 由于电子亲和能的差异, 外壳的纳米纤维和内部的导电线分别用作摩擦材料和导电电极, 如图9(e)所示. 当皮肤(或丙烯酸板)接触SETY时, 电子从皮肤转移到SETY, 这是由于PAN/PVDF纳米纤维的表面电子亲和力高的原因所导致的. 进一步将SETY制作成8 × 8 dpi的阵列传感器. 如图9(f)和图9(g)所示, 用手指对该设备进行按压时, 产生压力分布图像可以明显地区分手指腹部、指尖及手指两侧等不同的接触部位. 同时SETY还具有较高的敏感性, 可以检测出一只昆虫接触分离的过程. 基于PENG的压力分布传感器同样具备优异的性能. 2018年Wang等[83]通过对PVDF进行静电纺丝, 制备了基于PENG的仿生单电极压力分布传感器阵列(SPENG). 该器件不仅制作工艺简单, 而且性能稳定, 能实现16 dpi(4 × 4 dpi)的阵列传感, 如图10(a)所示. 当压力施加于在不同的位置时, 压力的外部空间分布可以通过相应的电压信号分布来识别, 如图10(b). 相较于非单电极模式的压力分布传感器, 该器件可以避免因电极短路所导致信号异常, 运行稳定性更加优异. 图 9 基于TENG的压力分布传感器 (a) 16 × 16阵列器件结构示意[81]; (b)压力分布监测过程的示意图[81]; (c) 36 × 20矩阵交叉型电极的器件结构示意图[81]; (d)基于TENG的压力分布传感器在商用智能手机中的应用[81]; (e) SETY的阵列结构示意图[82]; (f), (g)单点触碰时压力分布信号示意图及 3D输出信号示意图[82]; (h)昆虫接触传感器时的信号输出曲线[82]
图 9 基于TENG的压力分布传感器 (a) 16 × 16阵列器件结构示意[81]; (b)压力分布监测过程的示意图[81]; (c) 36 × 20矩阵交叉型电极的器件结构示意图[81]; (d)基于TENG的压力分布传感器在商用智能手机中的应用[81]; (e) SETY的阵列结构示意图[82]; (f), (g)单点触碰时压力分布信号示意图及 3D输出信号示意图[82]; (h)昆虫接触传感器时的信号输出曲线[82]Figure9. Pressure distribution sensor based on TENG: (a) The schematic diagram of device structure of 16 × 16 arrys[81]; (b) the process diagram of pressure distribution detection[81]; (c) schematic diagram of device structureof 36 × 20 matrix crossed electrode[81]; (d) pressure distribution sensor based on TENG appllied for a commercial smart phone[81]; (e) schematic diagram of the array structure of SETY[82]; (f), (g) schematic diagram of pressure distribution signal and 3D output signal in single point contact the device[82]; (h) signal output curve of ainsect contact the sensor[82].
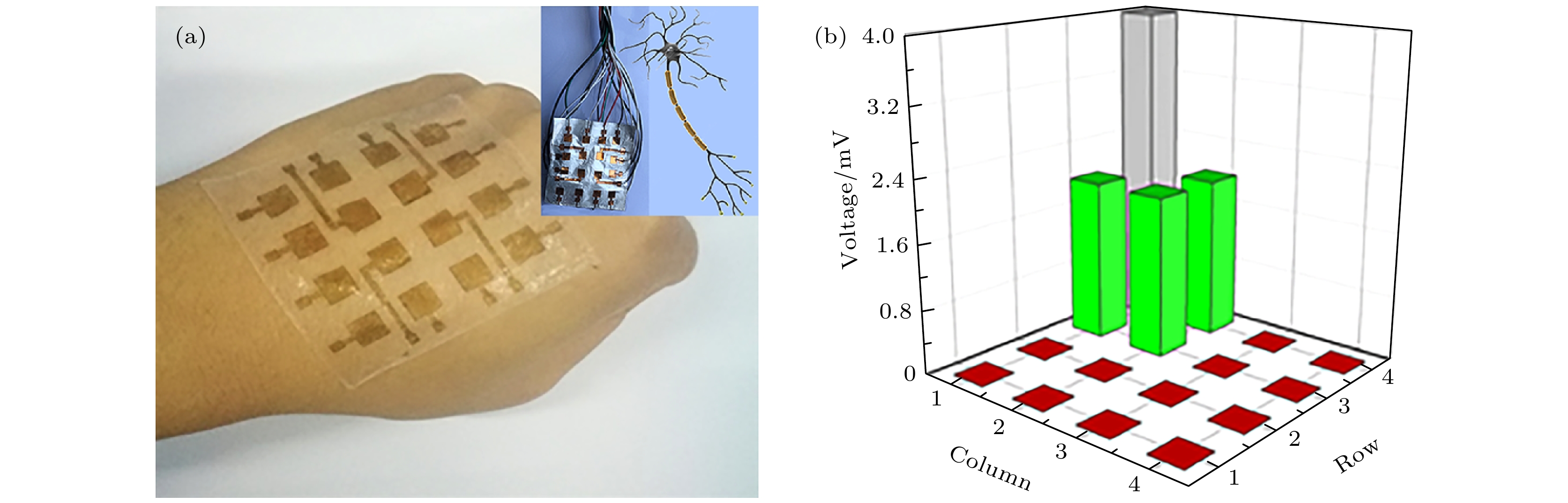 图 10 基于PENG的压力分布传感器[83] (a)SPENG的实物照片; (b)单点触碰时的压力分布的3D信号示意图
图 10 基于PENG的压力分布传感器[83] (a)SPENG的实物照片; (b)单点触碰时的压力分布的3D信号示意图Figure10. The pressure distribution based on PENG[83]: (a) Physical schematic diagram of SPENG; (b) schematic diagram of 3D output signal under pressure distribution signal at single point contact.
2
4.4.滑动传感器
滑动传感器可以对剪切力大小及方向、滑移速度和距离进行检测, 智能触觉传感领域有着重要的应用[84-86]. 滑动传感器的研究尚处于起步阶段, 其挑战是器件结构及电极结构设计. 目前报道的滑动传感器大多数选择基于单电极模式的TENG制备. 2015年Jing等[87]在Nature期刊上报道了一篇自驱动的薄膜滑动传感器, 可以用来检测接触物体在滑移过程中的速度与方向. 但是该器件的无法同时检测X, Y轴方向的运动, 实际应用中通常需要多个器件组合. 如图11(a)所示, 2018年Chen等[88]设计了一种受指纹启发的摩擦纳米发电机滑动传感器(STENG). 将碳纳米管与PDMS混合来制备类似于指纹的螺旋形结构, 当外部物体接触传感器时, 由于摩擦起电效应将发生电荷分离, 当外部物体接触电极1时, 其产生的电位要高于其他三个电极, 进而可以利用不同电极上电位分布信息来有效区分所施加切向力的方向, 如图11(b)所示. 该器件还可以反映出物体的运动细节信息, 例如滑移物在某个特定位置的速度等. 2018年Ren等[89]制备了一种基于纯弹性材料的自驱动传感器, 可以检测剪切力的方向. 该器件使用炭黑掺杂的聚二甲基硅氧烷为电极, 并做成四分结构, PDMS薄膜作为作为介电层, 如图11(c)所示. 在二者的接触表面制备微纳结构, 用来增加灵敏度. PDMS-CB电极在PDMS基板上整齐排列, 设计出具有四分区的单电极TENG的结构, 具有良好的柔韧性. 对器件施加剪切力时, 在二维区域内会引起微纳阵列结构的剪切变形和PDMS膜的弹性变形, 使得在四个电极上引起不同的电位变化, 从而获得剪切力的方向和大小. 该器件不仅可以监测沿着X, Y轴方向的切向力, 还可以检测沿45°方向的切向力, 如图11(d)所示. 图 11 基于TENG的滑动传感器 (a)指纹结构启发的TENG及其工作原理, 包含四个螺旋电极的示意图和照片[88]; (b)外部物体沿着不同方向接触传感器时的电压信号变化图[88]; (c) TENG传感器结构设计示意图和照片[89]; (d)检测施加斜侧45°方向切向力的动态输出关系曲线[89]
图 11 基于TENG的滑动传感器 (a)指纹结构启发的TENG及其工作原理, 包含四个螺旋电极的示意图和照片[88]; (b)外部物体沿着不同方向接触传感器时的电压信号变化图[88]; (c) TENG传感器结构设计示意图和照片[89]; (d)检测施加斜侧45°方向切向力的动态输出关系曲线[89]Figure11. The sliding sensor based on TENG: (a) A schematic diagram and photograph of a fingerprint-structure-inspired TENG and how it works, including four spiral electrodes[88]; (b) the signal of the voltage when the external object is in contact in different directions[88]; (c) the schematic diagram and photo of the TENG sensor structure and of real product[89]; (d) detection of dynamic output of the tangential force in the 45° direction[89].
基于自驱动触觉传感器设计研究的挑战主要集中于以下几个方面:
1)新型传感材料的设计研究. 从纳米发电机的原理可以看出, 设计生长强电负性的材料可以大幅提升传感器的性能, 同时, 实际应用中可拉伸性能、透明度、稳定性、生物相容性等需求也需要新型材料设计及制备技术的发展来满足.
2)多功能自驱动传感器的设计制备. 对于可穿戴设备的应用, 不仅仅需要触觉传感, 更需要实现温度、湿度、光学等多物理与触觉信号的集成检测, 同时避免各种传感器之间信号的相互干扰, 对于传感器结构及信号采集系统的设计制备都提出了更高的要求.
3)自驱动传感系统的设计制备. 目前的自驱动传感器研究主要集中于传感器本身, 对于整个系统的能耗研究鲜有报道. 对于可穿戴电子器件的应用, 不仅要考虑传感器本身实现自驱动, 更要考虑整个系统能耗的降低, 甚至实现全系统自驱动.
自驱动触觉传感器的应用十分广泛, 纳米发电机作为解决这一领域瓶颈问题的可行方法, 仍需要化学、材料、信息等多领域的科学家们的共同努力, 在半导体材料、器件结构设计、系统设计等方面进行研究. 相信在不久的未来基于纳米发电机的自驱动触觉传感器必将取得重要进展, 为国家经济建设和人民生活水平的提高做出贡献.
