全文HTML
--> --> -->近几年, 随着材料科学技术的发展, 弹性材料在不同领域的应用备受关注. 其中, 在入水问题上, 弹性体不变形或者弱变形的流固耦合现象也开始被国内外****重视. 当浮力筒与自由水面碰撞时, Russo等[26]利用加速度计、高频电位计和高速摄像仪研究了入水流固耦合现象中运动体的水动力变化特性. 针对该流固耦合问题, Facci等[27]提出了一种数值模拟方法, 并得到了很好的验证. Falcucci等[28]在柔性浮筒与自由液面发生流固耦合的过程中, 利用力学传感器对作用在浮筒的水动力进行了测试与研究. Panciroli等[29]采用高速成像技术对柔性圆柱入水过程中的空泡形成和整体结构变形等问题开展了深入地研究和分析. 为了揭示弹性体的受力特性, 孙士丽[30]采用实验和数值模拟结合的方法研究了弹体出、入水过程中的流固耦合效应. 目前, 关于入水流固耦合问题的研究成果主要集中在运动体入水后不变形或微变形的流固耦合现象上. 而对于能够影响空泡演化形态的变形行为的研究极其少见.
本文研究的超弹性球体入水现象属于大变形的流固耦合问题, 其变形对空泡的形成有着复杂而有规律的影响. 关于这方面的研究, 仅仅有国外****Hurd等[31]采用高速摄像对可变形的弹性体球入水现象开展了实验研究, 首次发现弹性球体入水后会形成独特的嵌套空泡现象. 同时, 他们也提出了球体的变形行为可以通过材料性能和入水冲击条件进行预测.
综合已公开的国内外关于弹性运动体入水问题的文献表明, 除上述Hurd及其团队****之外, 国内外****对超弹性球体入水问题的研究几乎没有. 基于高速摄像技术, 本文开展了超弹性球体入水流固耦合实验研究, 区别于Hurd的研究内容, 本文着重分析了球体直径、剪切模量及入水冲击速度对超弹性球体入水后形成的空泡演化和球体变形行为的影响. 本文的研究成果将为今后研究大变形入水流固耦合问题奠定基础.
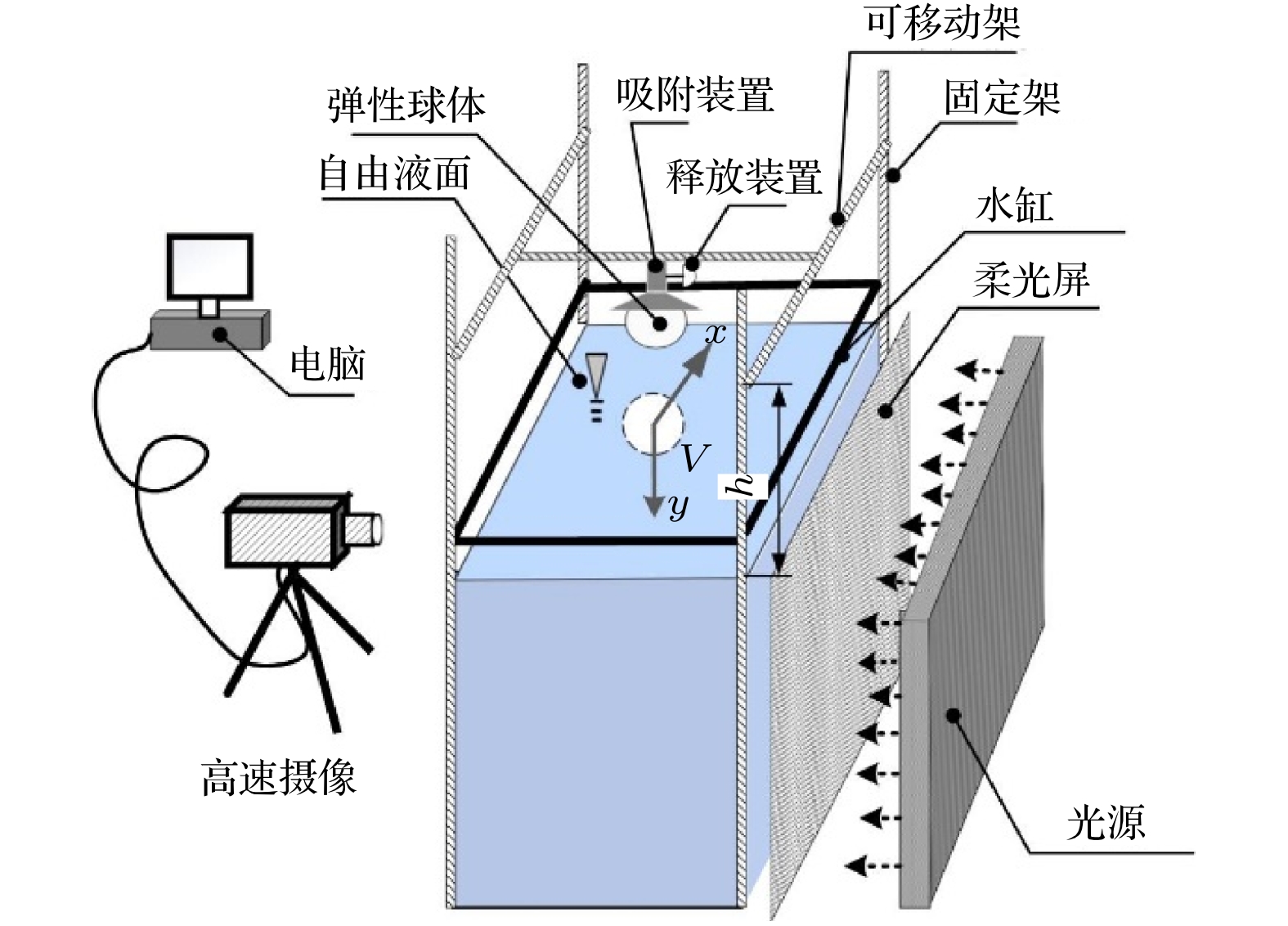 图 1 实验系统示意图[12]
图 1 实验系统示意图[12]Figure1. Schematic diagram of experimental system[12].
除了捕捉入水空泡形态, 球体的运动特性和变形行为的研究分别通过测量球体的入水位移和变形量两个参数来实现. 在考虑了入水的折射效应后, 通过自编程序提取了球体的入水位移和变形量. 入水位移yb是指球体底部与自由液面之间的距离, 如图2 (b)中的红色十字符号标注所示. 同时, 变形量的测试首先将球体的变形假设为横向(平行于自由液面)或者纵向(垂直于自由液面)椭圆, 如图2 (b)中的黄色椭圆符号所示[26]. 变形量的测试结果用变形系数λ来表示. 定义变形系数λ为弹性球体入水之后平行于自由液面的变形球体的宽度与初始球体直径D之比.
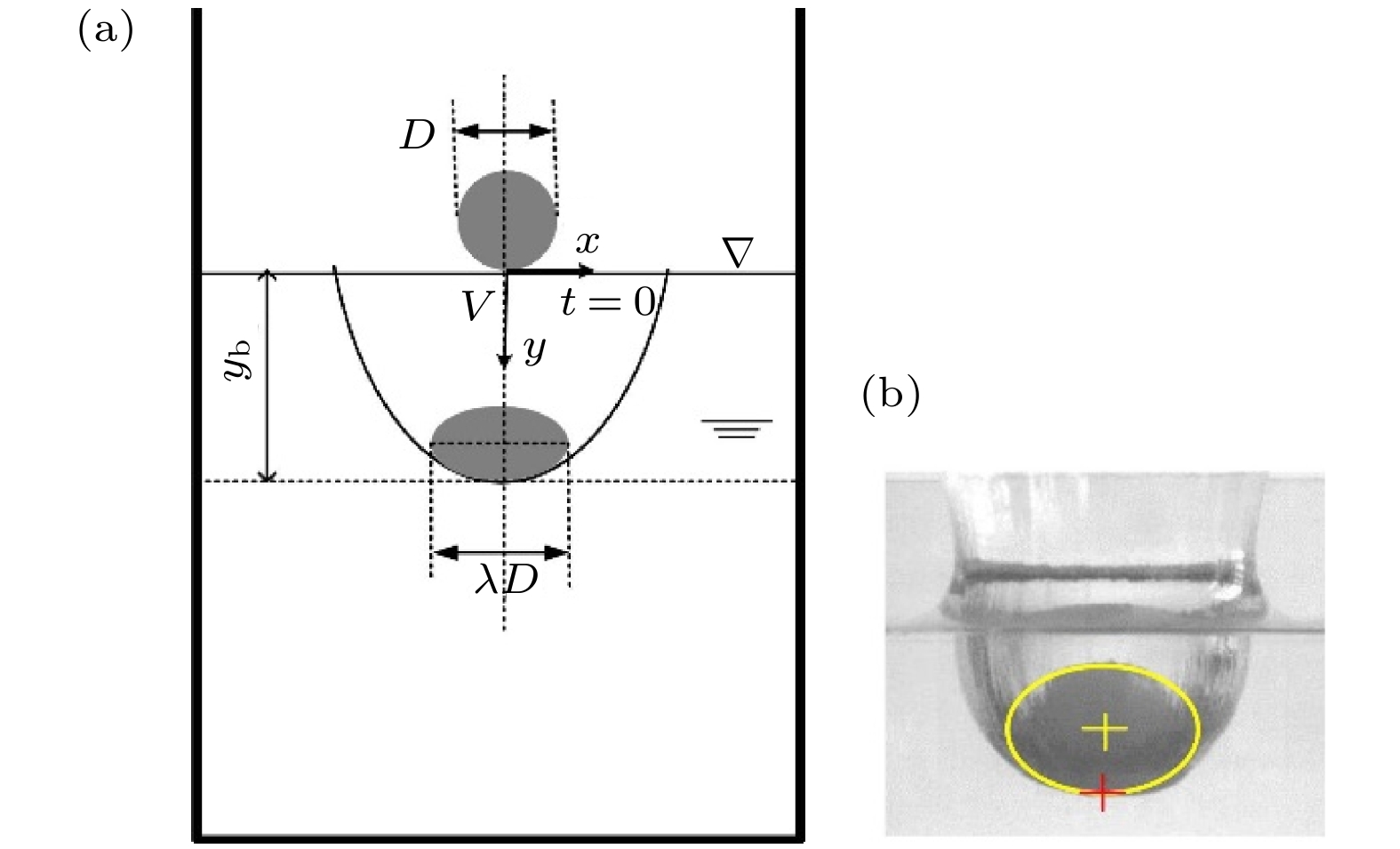 图 2 参数测试图
图 2 参数测试图Figure2. Schematic diagram of test parameters.
实验采用的超弹性球体模型是由不可压缩硅橡胶制作而成. 具体制作过程是: 首先将液体硅胶和固化剂混合搅拌, 通过添加稀释剂来改变材料硬度(制作完成后通过压痕实验测量其球体的剪切模量). 其次, 通过小型振动台去除液体中夹带的空气, 然后将该硅胶混合物倒入已知直径的铝模具中. 经过12 h固化后脱模, 选取光滑、合适的弹性球体开展入水实验研究, 如图3所示. 超弹性球体入水测试工况主要通过入水冲击速度(接触水面时球体速度)V, 球体直径D, 材料剪切模量G来表征.
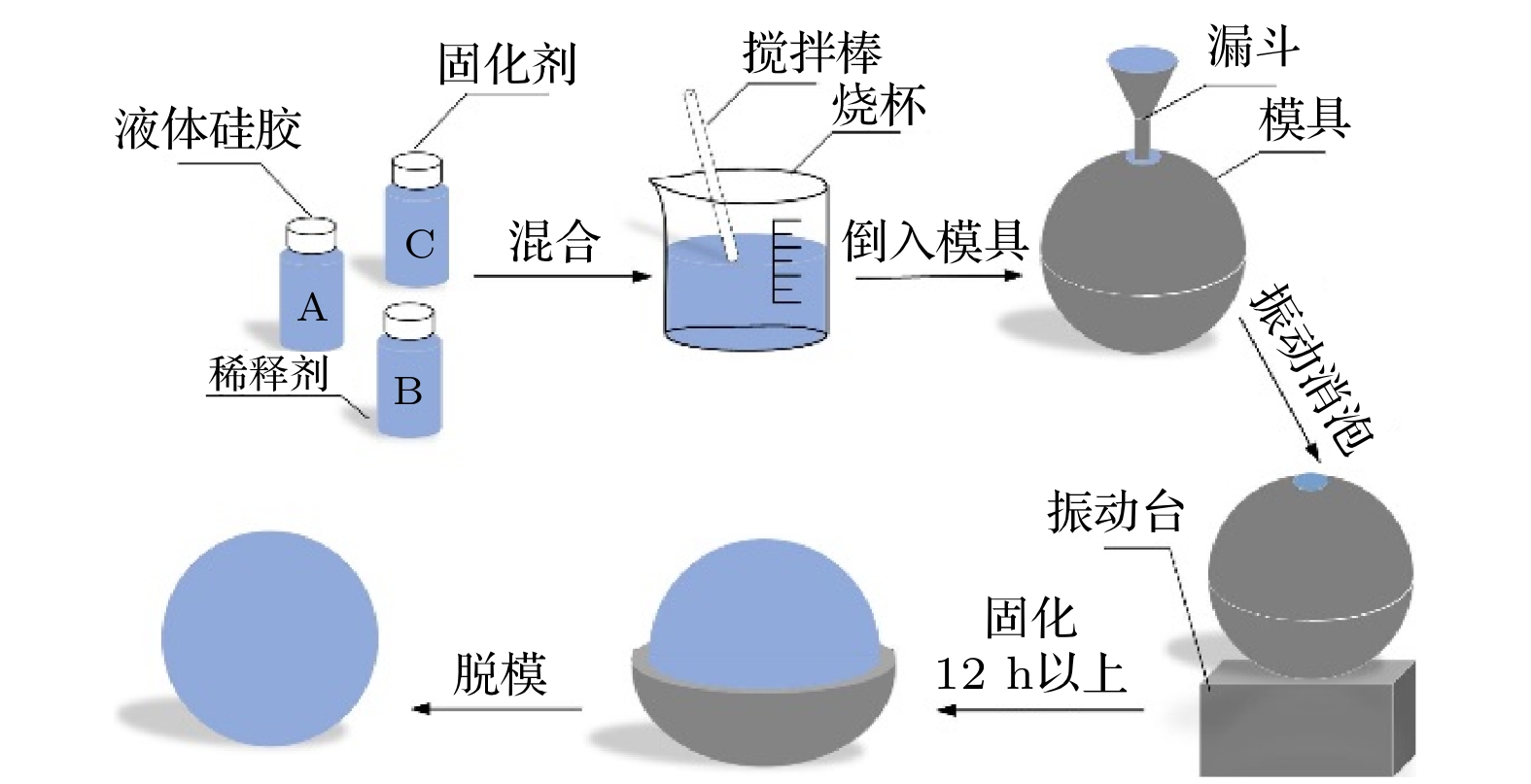 图 3 球体制作流程[12]
图 3 球体制作流程[12]Figure3. Flow chart of the sphere manufacturing[12].
 图 4 超弹性球入水空泡
图 4 超弹性球入水空泡Figure4. Water-entry cavity formed by hyperelastic spheres.
2
3.1.剪切模量对超弹性球体入水流固耦合的影响
在超弹性球体材料属性(直径D = 61 mm, 密度ρ = 1007 kg/m3), 以及入水冲击速度V = 4.4 m/s相同的条件下, 对剪切模量不同的三个超弹性球体(G = 6.1, 10.2, 47.0 kPa)开展实验研究. 为了清楚地表述三个球体的描述, 将三种不同剪切模量的球体分别编号为: 1号球体(G = 6.1 kPa), 2号球体(G = 10.2 kPa)及3号球体(G = 47.0 kPa). 三种不同剪切模量的球体入水后形成的空泡形态演化情况, 如图5所示. 从图中可以看出剪切模量不同的超弹性球体入水后形成的空泡形态有所不同. 当球体撞击自由液面后(t = 10 ms), 1号、2号球体都会发生平行与自由液面的横向变形, 使得流体幅度大地向外排开, 进入大量空气, 进而形成又宽又短的入水空泡. 但是, 3 号球体硬度相对较大(剪切模量大), 不易发生变形, 即球体微弱的变形对初始空泡的形成影响不大. 当球体入水t = 25 ms时, 1号、2号球体已经开始发生垂直与自由液面的纵向变形(第二阶段球体纵向变形穿透空泡壁面). 但此时, 3号球体虽然没有发生大变形, 但是由于其球体内部材料发生了微弱地颤振, 造成了向下发展的空泡壁面出现了明显的波纹. 当球体入水大约t = 40 ms时, 1号球体在水动力的作用下已经形成了嵌套空泡现象. 而2号球体由上述描述可知出现嵌套空泡的时刻是在t = 53 ms. 不同于1号、2号球体, 仍然观察不到3号球体的变形, 球体微弱的颤振再次造成空泡壁面出现微弱的波纹. 随着入水深度的增加, 水下阻力造成的热损失增大, 1号、2号球体嵌套空泡现象及3号球体空泡壁面的波动现象都会逐渐弱化. 对比1号、2号球体与3号球体形成的入水空泡, 可以得到当剪切模量足够小时, 才会产生嵌套空泡现象. 形成嵌套空泡的出现时刻受球体剪切模量的影响. 由于球体的变形呈现出了周期特性[31], 球体的剪切模量越小, 球体变形周期就越长, 故形成嵌套空泡所用的时间也越长. 同时, 嵌套空泡现象越发明显及其保持时间也相对较长. 图 5 不同剪切模量球体入水空泡形态对比 (a) G = 6.1 kPa; (b) G = 10.2 kPa; (c) G = 47.0 kPa
图 5 不同剪切模量球体入水空泡形态对比 (a) G = 6.1 kPa; (b) G = 10.2 kPa; (c) G = 47.0 kPaFigure5. Comparison of cavity shapes formed by hyperelastic spheres with different shear moduli: (a) G = 6.1 kPa; (b) G = 10.2 kPa; (c) G = 47.0 kPa.
不同剪切模量的超弹性球体入水后位移的时间历程如图6所示. 在相同的入水时刻, 球体剪切模量越大, 入水位移越大. 这一点也可以通过图5观察到, 1号、2号球体形成的空泡长度要比3号球体的空泡长度短, 主要原因是剪切模量越小的球体入水后变形越严重. 在变形过程中因材料振荡而耗散的能量就越大, 故球体在下降过程中用于球体位置势能的动能就会越少, 即也会导致形成的空泡长度缩短.
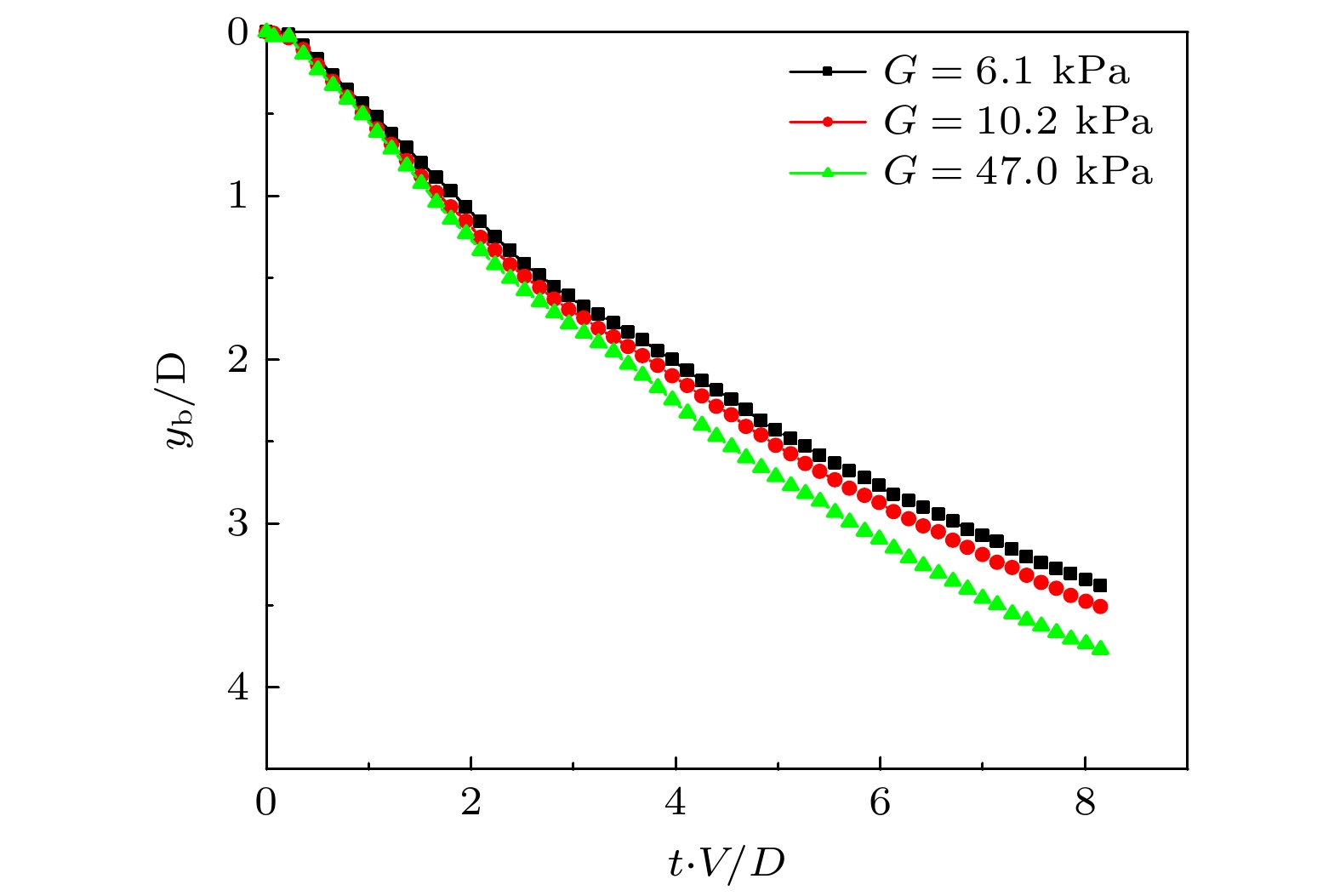 图 6 不同剪切模量球体的入水位移
图 6 不同剪切模量球体的入水位移Figure6. Displacement of spheres with different shear moduli.
2
3.2.冲击速度对超弹性球体入水流固耦合的影响
为探究入水冲击速度对超弹性球体入水空泡和运动特性的影响, 本文采用超弹性球体(直径D = 61 mm, 密度ρ = 1007 kg/m3及剪切模量G = 6.1 kPa)通过改变其入水冲击速度(V = 1.1, 2.5, 3.3 m/s)得到的流固耦合现象分别被呈现在图7中. 当入水冲击速度V = 1.1 m/s时, 超弹性球体具有的动能相对较少, 导致球体入水深度相对较浅. 在球体的入水过程中, 固、液、气三相的接触点会迅速上移至球顶端, 连接水面与球体的空泡逐渐形成半月牙状, 此时重力和表面张力的平衡作用占主导地位. 同时, 该超弹性球体在此较低的冲击速度(V = 1.1 m/s)下, 几乎不会发生变形, 因此所形成的空泡几乎没有受到球体变形行为的影响. 当入水冲击速度增加到V = 2.5 m/s和V = 3.3 m/s, 弹性球体开始发生变形, 会经历以上三个阶段 (第一阶段球体横向变形形成宽而短空泡, 第二阶段球体纵向变形穿透空泡壁面, 第三阶段球体横向变形形成嵌套空泡). 对比两个入水冲击速度(V = 2.5 m/s和V = 3.3 m/s)的空泡形态及球体变形行为, 可以发现入水冲击速度越大, 受到的冲击载荷越大, 撞击自由液面后, 横向变形的幅度也越大. 在相同的入水时刻(t = 10 ms), 形成的空泡形态也越发地宽而短. 同时, 纵向变形较为严重, 进而形成的嵌套空泡现象更为明显. 实际上, 引起该现象的主要原因是入水冲击速度越大, 球体入水前具有的动能越大, 故用于球体大变形的应变能增加, 变形程度也增大, 嵌套空泡现象也更加明显. 因此, 嵌套空泡形成的条件需要足够大的入水冲击速度.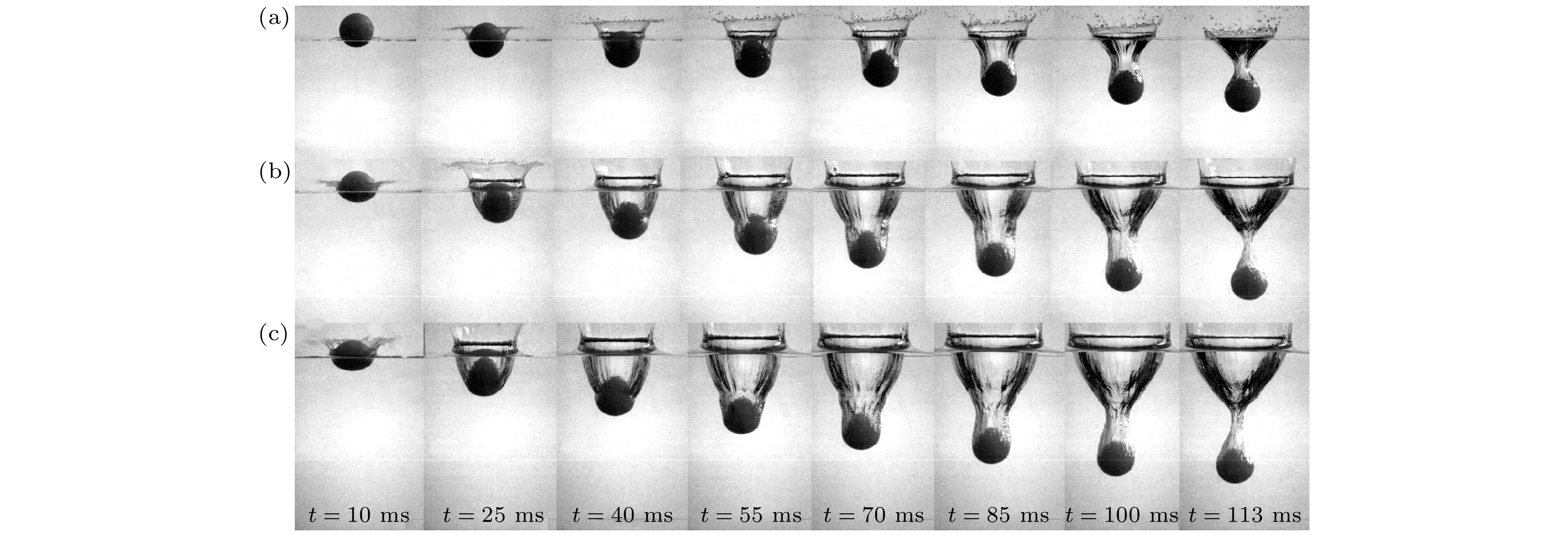 图 7 不同冲击速度下球体入水空泡形态对比 (a)V = 1.1 m/s; (b) V = 2.5 m/s; (c) V = 3.3 m/s
图 7 不同冲击速度下球体入水空泡形态对比 (a)V = 1.1 m/s; (b) V = 2.5 m/s; (c) V = 3.3 m/sFigure7. Comparison of cavity shapes formed by hyperelastic spheres with different impact velocities: (a)V = 1.1 m/s; (b) V = 2.5 m/s; (c) V = 3.3 m/s.
如图8所示, 除了可以观察到和刚性球体一样的变化规律—随着入水冲击速度的增加, 入水位移也增大. 还可以得到入水冲击速度(V = 1.1 m/s)越小时, 入水位移随时间的变化接近是线性关系. 但随着入水冲击速度的增大到V = 2.5 m/s及V = 3.3 m/s时, 弹性球体的入水位移与入水时间的关系逐渐向多项式曲线过渡. 分析其主要的原因是, 对于相同材料属性的弹性球体, 当入水冲击速度较小(V = 1.1 m/s)时, 球体从冲击自由液面到空泡闭合几乎不发生变形. 而当入水冲击速度增大到V = 2.5 m/s及V = 3.3 m/s时, 球体开始发生变形, 在变形过程中球体内部材料振荡会导致能量耗散, 进而造成用于入水势能的动能较少, 故入水位移的变化趋势也有所不同.
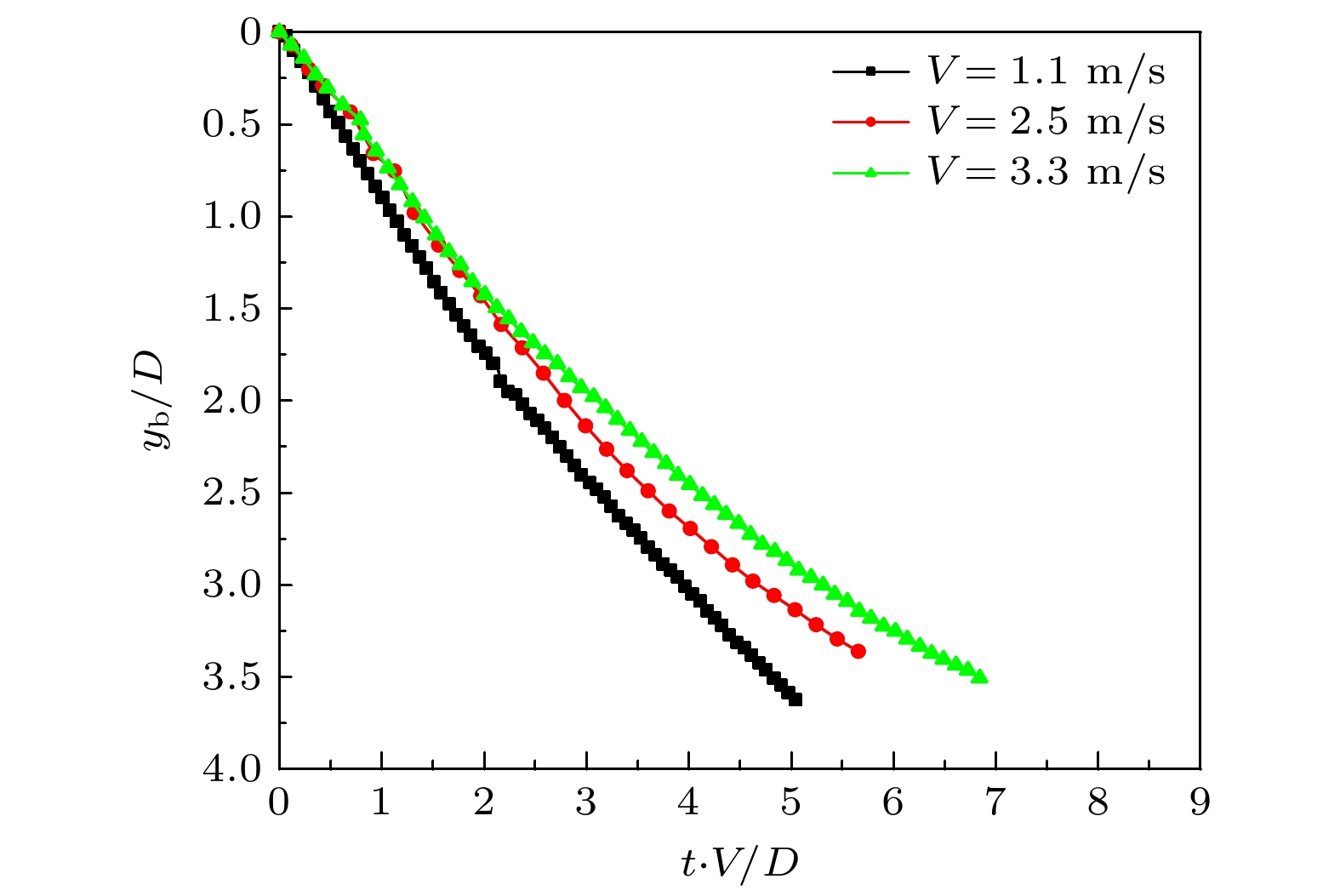 图 8 不同入水冲击速度下的入水位移
图 8 不同入水冲击速度下的入水位移Figure8. Displacement of sphere with different impact velocities
为了深入研究入水冲击速度对嵌套空泡的影响, 图9呈现了极易发生变形的超弹性球体(直径D = 61 mm, 密度ρ = 1007 kg/m3及剪切模量G = 6.1 kPa)在不同冲击速度(V = 3.3, 4.4, 4.8 m/s)下形成的嵌套空泡现象. 由图9可知, 在相同的入水时刻, 入水冲击速度的增加仅仅加剧了球体的变形程度, 而并没有改变球体的变形周期. 因此, 虽然入水冲击速度不同, 嵌套空泡形成的时刻几乎是相同的. 总之, 入水冲击速度对嵌套空泡的形成时刻几乎没有影响, 仅会影响其产生嵌套空泡现象的明显程度.
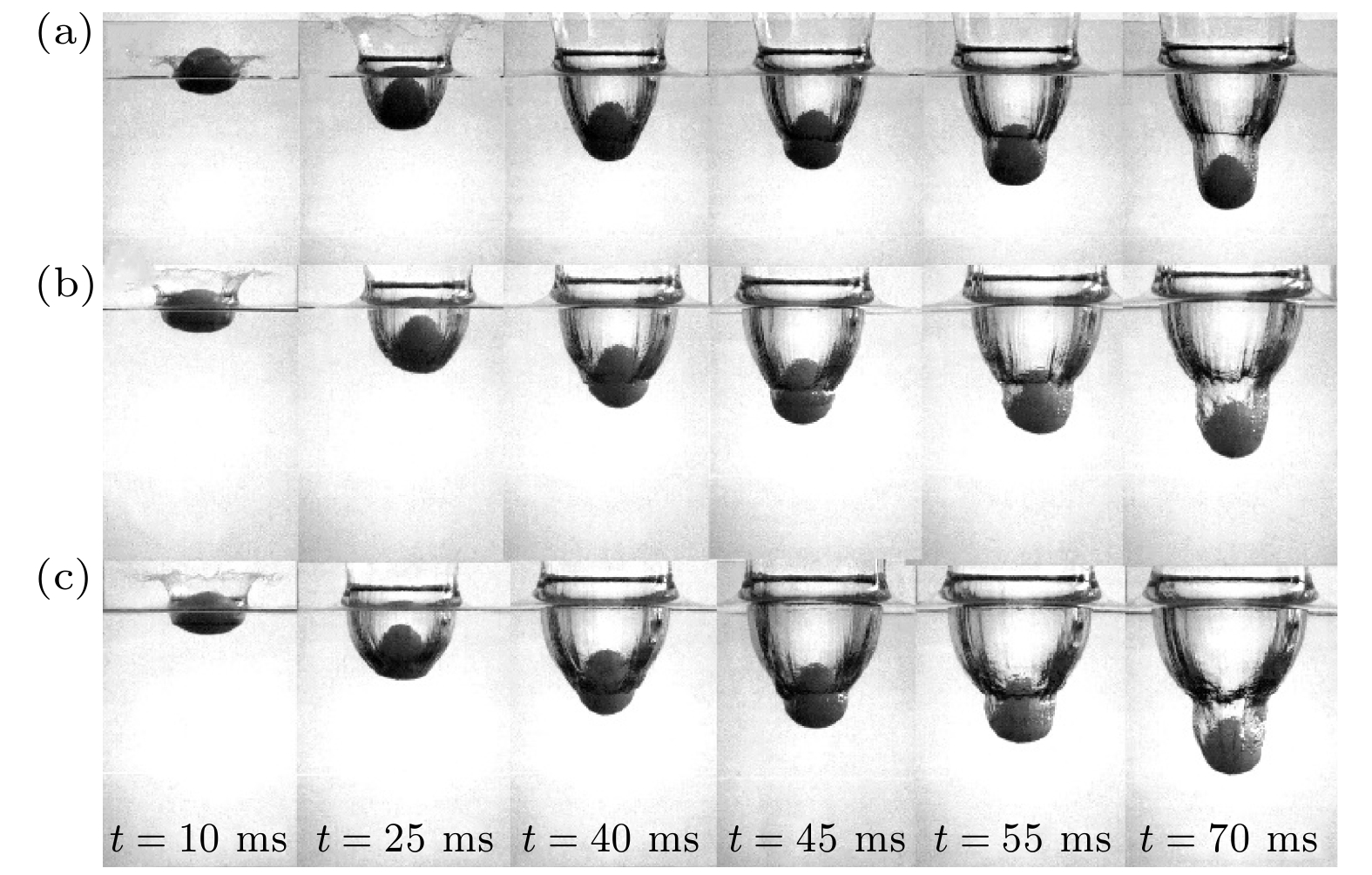 图 9 不同冲击速度下嵌套空泡形态对比 (a) V = 3.3 m/s; (b) V = 4.4 m/s; (c) V = 4.8 m/s
图 9 不同冲击速度下嵌套空泡形态对比 (a) V = 3.3 m/s; (b) V = 4.4 m/s; (c) V = 4.8 m/sFigure9. Comparison of nested cavities with different impact velocities: (a) V = 3.3 m/s; (b) V = 4.4 m/s; (c) V = 4.8 m/s.
2
3.3.球体直径对超弹性球体入水流固耦合的影响
本文在材料属性(剪切模量G = 10.2 kPa, 密度ρ = 1007 kg/m3)和入水冲击速度V = 4.8 m/s相同的条件下, 针对三个不同直径(D = 80, 61, 56 mm)的超弹性球体开展入水实验研究, 如图10所示. 图中再次证明弹性球体入水后会经历三个阶段的流固耦合现象. 对比三个不同球体直径形成的空泡形态, 发现在相同的入水时刻, 大直径弹性球体形成的空泡比小直径弹性球体形成的空泡更加宽大, 其原因主要是大直径的弹性球体撞击自由液面变形后向外排开水的幅度会更大, 导致进入的空气更多. 同时, 当大约入水时间t = 40 ms时, 小直径弹性球体(直径D = 56 mm)出现了嵌套空泡现象. 但是由于球体变形越大, 排开水的体积越大, 完成三个阶段所需要的时间越长, 故大直径弹性球体(直径D = 80 mm)在入水时间t = 55 ms才第一次形成了嵌套空泡. 由于球体变形行为, 直径越大的超弹性球体形成的嵌套空泡现象越为明显, 产生嵌套空泡所用的时间也越长. 同时, 从图中可以观察到不同直径的弹性球体所形成空泡的闭合时间是不同的: 在相同条件(密度、剪切模量、冲击速度)下, 小直径超弹性球体的空泡闭合时间比大直径超弹性球体的短. 这一规律与刚性球体的空泡闭合时间随球体直径的变化规律一致(球体直径越大, 空泡闭合时间越长).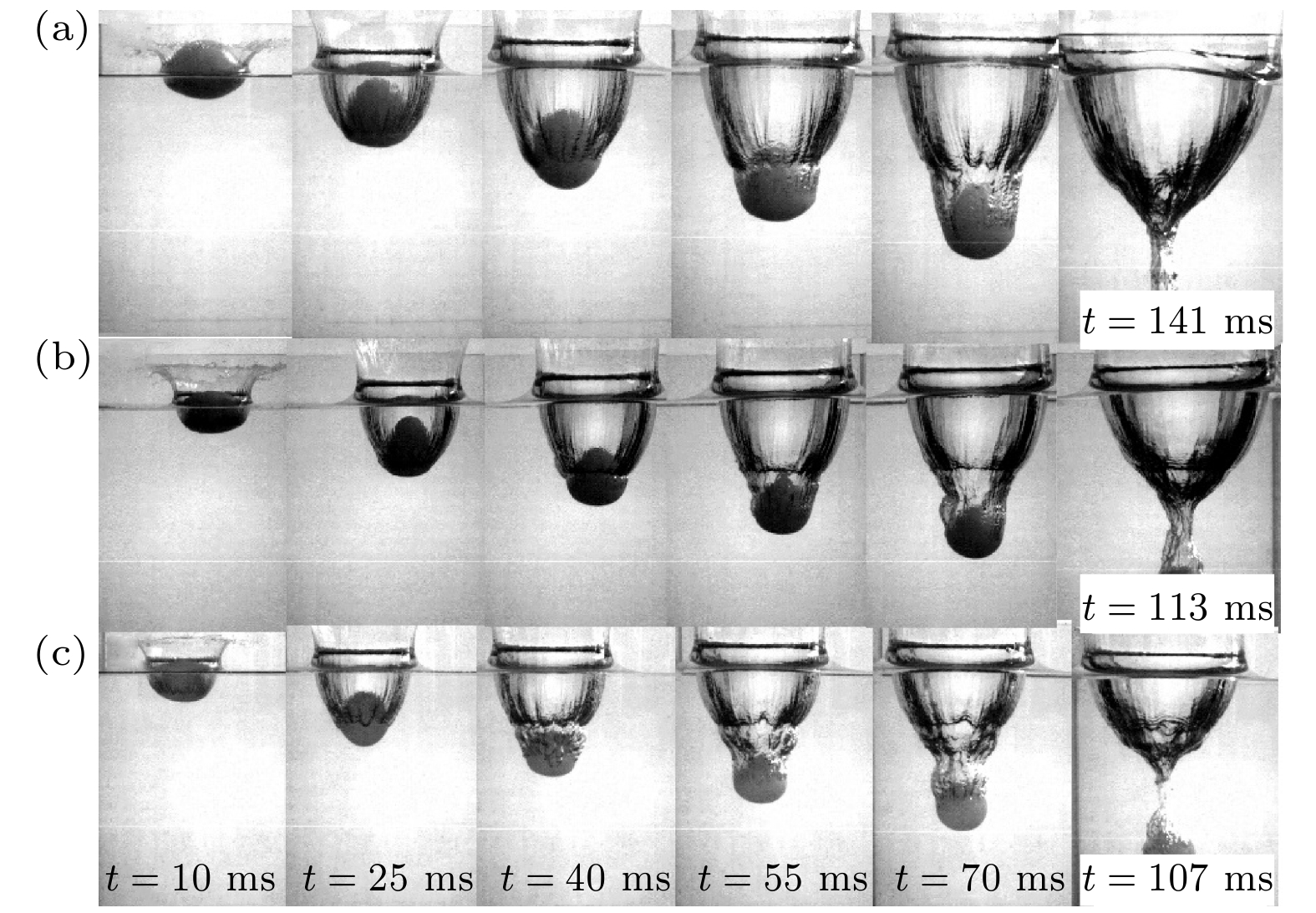 图 10 不同直径球体入水空泡形态对比 (a) D = 80 mm; (b) D = 61 mm; (c) D = 56 mm
图 10 不同直径球体入水空泡形态对比 (a) D = 80 mm; (b) D = 61 mm; (c) D = 56 mmFigure10. Comparison of cavity shapes formed by hyperelastic spheres with different diameters: (a) D = 80 mm; (b) D = 61 mm; (c) D = 56 mm.
不同直径弹性球体的入水位移时间历程如图11所示. 在相同的入水时刻, 虽然对球体的入水位移已经进行了无量纲化处理, 但是从图中仍然可以观察到球体直径越小, 球体的入水位移越大. 分析其原因主要可能是球体直径越大, 越容易发生变形, 在球体变形过程中导致的能量损失及入水过程中阻力产生的热能损失, 最终抵消和超越了其直径大的球体入水前所拥有的动能增量, 从而导致其用于球体入水位置的势能却减少.
 图 11 不同直径球体入水位移
图 11 不同直径球体入水位移Figure11. Displacement of sphere with different diameters.
2
3.4.入水变形行为
基于上述入水流固耦合现象中的空泡演化现象, 接下来着重分析入水过程中引起空泡形态发生变化的球体变形行为. 早在2017年, Hurd等[31]已经指出超弹性球体入水后会发生周期性的变形行为. 在本文的实验研究中也观察到这一现象, 但是由于数据的重复性, 仅仅给出了超弹性球体(G = 10.2 kPa)入水后周期性变形行为的曲线变化, 如图12所示. 为了深入地描述超弹性球体入水后变形行为的变化特性, 在文中引入了两个无量纲参数: 弗劳德数

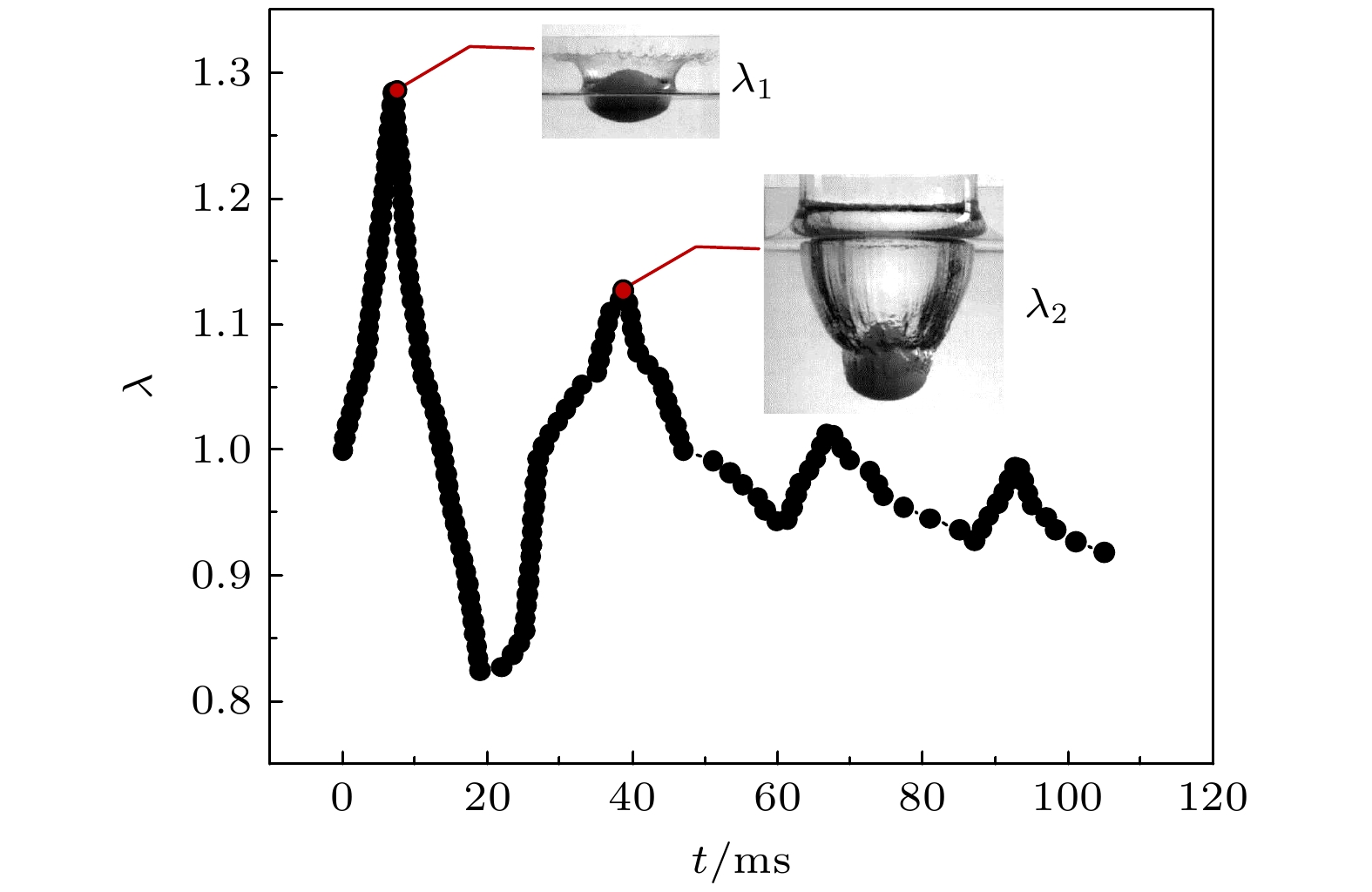 图 12 超弹性球体入水变形量系数的时间历程
图 12 超弹性球体入水变形量系数的时间历程Figure12. Time history of sphere deformation coefficient during water entry.
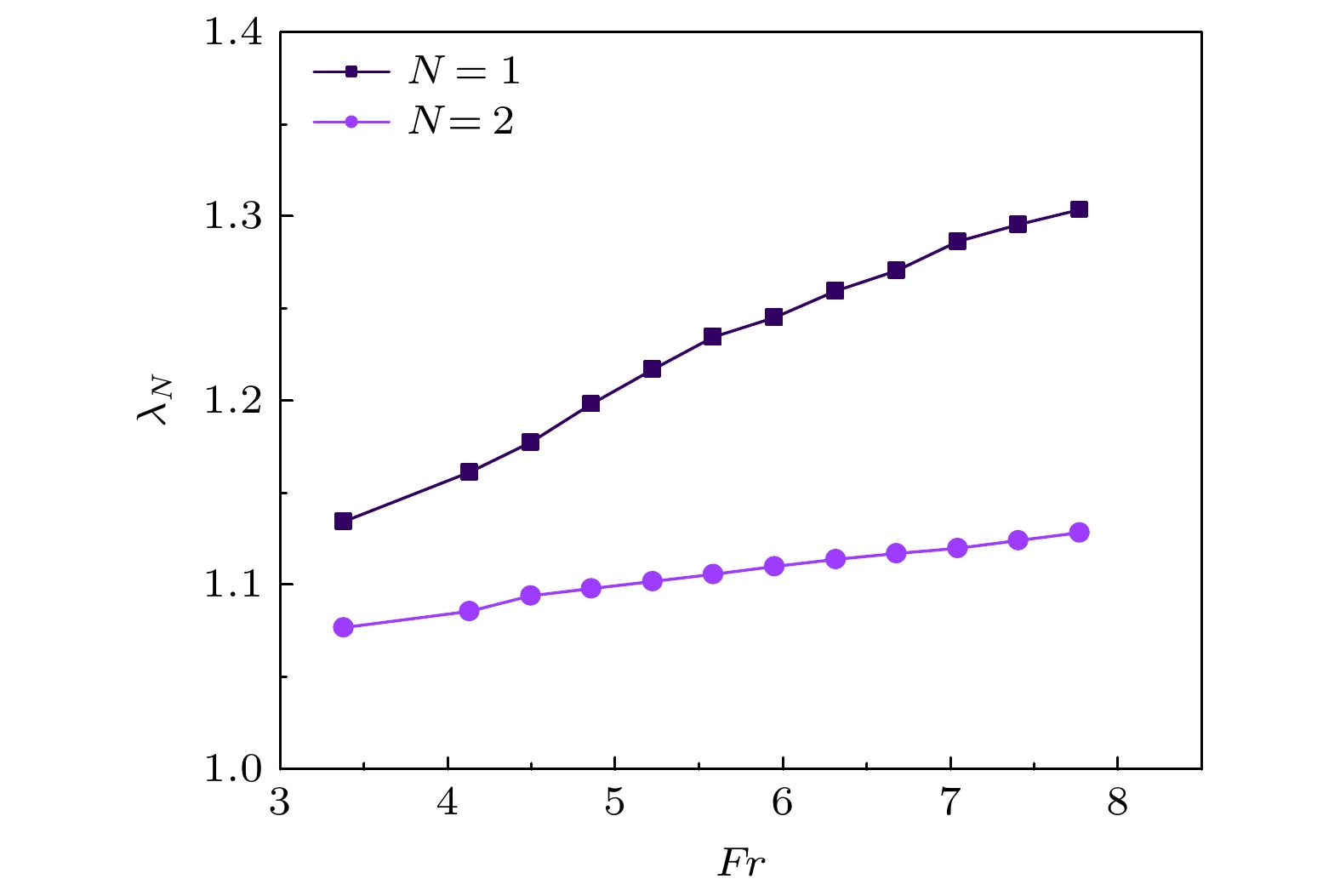 图 13 超弹性球体(G = 10.2 kPa)第一、二变形周期内λN随Fr的变化
图 13 超弹性球体(G = 10.2 kPa)第一、二变形周期内λN随Fr的变化Figure13. Change of λN in the first and second deformation cycles (G = 10.2 kPa) with Fr
 图 14 超弹性球体(D = 61 mm)第一、二变形周期内λN随η的变化
图 14 超弹性球体(D = 61 mm)第一、二变形周期内λN随η的变化Figure14. Change of λN in the first and second deformation cycles (D = 61 mm) with η.
从图14中可以看出, 对于相同球体直径而言, 随着剪切模量与水动力之比η的增大, 第一、二个变形周期内超弹性球体的变形量系数λ先快速下降, 后平稳下降. 其主要原因是对于剪切模量越小的球体而言, 入水后第一个变形周期内会发生更为严重的变形行为. 随着剪切模量的增大, 变形行为会急剧地弱化, 这种弱化趋势不是线性关系而是多项式曲线的关系, 如图13中λ1所示. 同时, 由于第一个变形周期内的应变能损失情况(第一个变形周期内应变能损失越多, 则第二个变形周期内能用于球体变形的应变能就越少, 变形幅度就越小), 故随着η的增大, 第一个变形周期内λ1值与第一个变形周期内λ2值的差值也逐渐减小.
1)入水过程中嵌套空泡现象产生的条件是: 足够大的入水冲击速度和足够小的球体剪切模量.
2)超弹性球体的剪切模量越小, 变形越严重, 形成的嵌套空泡现象越明显, 产生嵌套空泡所用的时间及其保持的时间也越长. 由于球体变形过程中材料振荡引起的能量损耗, 入水位移及形成的空泡长度随着剪切模量的减小而降低.
3)随着入水冲击速度的增大, 球体变形越大, 嵌套空泡现象越明显. 但是, 超弹性球体嵌套空泡产生时间不受入水冲击速度的影响.
4)大直径超弹性球体产生嵌套空泡现象所用的时间要比小直径超弹性球体的长. 虽然直径越大的球体动能越大, 但是入水后球体的位移及其形成的空泡长度却越小.
5)入水过程中球体的变形行为随弗劳德数增大而增强, 但随着剪切模量与水动力之比增大而减弱.
