全文HTML
--> --> -->传统的基于Radon变换的层析技术很难在极少角度采样的情况下获得较好的重建结果. Mojette变换是一种最小冗余采样的离散Radon变换, 可以根据多个投影之间的相互独立特性对投影个数、投影角度等进行变化, 通过改变不同投影矢量下的采样率来控制冗余度的大小, 因此可以在最大程度上避免投影信息的重复和冗余采样[9]. Mojette变换的理论基础由Katz[10]提出的离散角度概念以及Herman[11]提出的迭代算子共同构筑而成, 该变换利用满足Katz引理的稀疏角度即可被精确重建, 其重建所需的数据采集量远小于Radon变换所需的数据量[12-14]. 基于Mojette变换的层析重建能够显著减少所需的投影角度和投影射线条数, 其重建所需的数据采集量远小于Radon变换所需的数据量, 在稀疏角度下具有良好的重建性能. 并且实际的Radon变换投影可以转换为Mojette投影, 为基于Mojette变换的实际投影层析重建提供可能[15,16].
Mojette变换层析理论中的可精确重建条件以及最少投影角度布局对于实际层析系统的建立以及提高重建精度具有非常重要的指导意义[17]. 在传统的基于二维Radon变换[18,19]和二维Mojette变换的层析重建技术[20,21]中, 探测器放置在被测物体周围同一水平面内, 进行平行投影的采集. 当实际测量环境中水平面内投影角度受限时, 可以在三维空间中进行投影采集, 此时层析投影模型为三维Radon变换或三维Mojette变换. Cai等[22]利用数值计算的方法讨论了基于三维Radon变换层析技术中投影角度的三维空间分布对重建精度的影响. 目前, 从理论上分析和解释层析系统中投影角度的最优布局方案, 特别是对三维Mojette变换以及相应的层析重建理论的相关研究仍较少.
为了在理论上获得Mojette变换层析技术中的最优投影角度空间布局方案, 本文将建立三维Mojette变换数学模型, 并且利用基于角的重建(corner based inversion, CBI)算法对精确重建条件进行研究. 以此为基础, 结合实际探测器像素数目受限条件, 提出并确定最优投影角度方案.














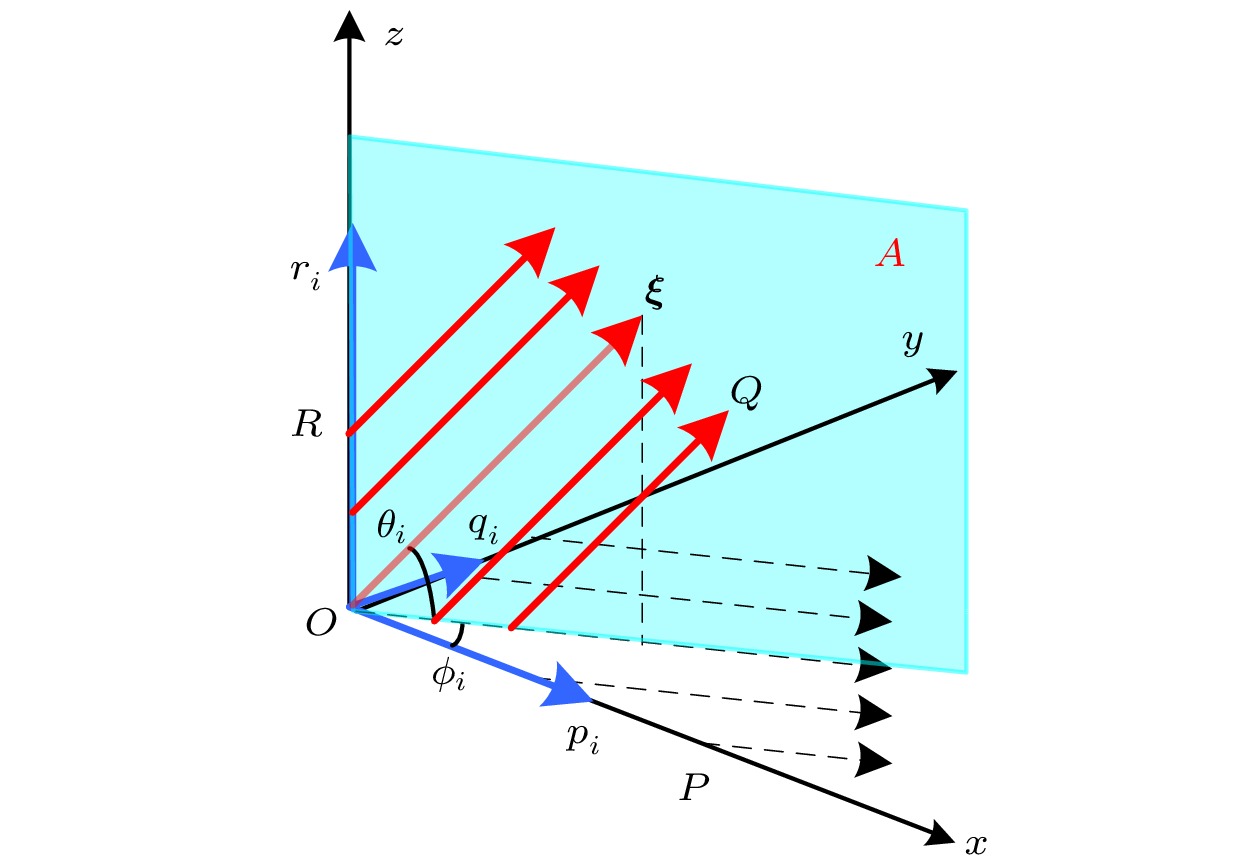 图 1 三维Mojette变换示意图
图 1 三维Mojette变换示意图Figure1. Schematic diagram of three-dimensional Mojette transform.
当













步骤1 矢量





步骤2 在矢量



由于第1次二维Mojette变换投影矢量










三维Mojette变换投影的列数






 图 2 (a)三维Mojette变换投影; (b)视觉投影
图 2 (a)三维Mojette变换投影; (b)视觉投影Figure2. (a) Three-dimensional Mojette transform projection; (b) visual projection.




从几何角度出发, 二维Mojette变换的精确重建条件可理解为: 若所有投影矢量的绝对和超出被测区域, 则该图像可被精确重建. 将该结论推广至三维情况, 可得三维Mojette变换的精确重建条件为
利用CBI算法进行三维Mojette变换重建时, 除了对待重建三维物体进行正常投影外, 在相同投影条件下对与重建物体相同维度的三维全1矩阵和索引矩阵进行投影. 全1矩阵投影的作用是: 通过投影可以从投影向量值中看出某投影矢量下的射线穿过的像素中心点的个数, 当投影向量值中的分量为1时, 说明该投影射线穿过的路径上只有一个像素点值的贡献, 可直接求解出变量值. 当向量值中有多个1存在时, 可依次进行重建. 索引矩阵投影的作用是: 索引矩阵中的像素点值从左上角的(1, 1, 1)点赋值为0开始, 从左向右、从前到后、从上至下像素点以此递增, 每次加1, 遍历至右下角最后一个像素点时, 该点的值为

选择经典的Shepp-Logan模型进行数值模拟实验以验证精确重建条件的正确性. 模拟三维物体的分辨率为P = Q = R = 48, 所有水平二维平面为相同的48 × 48的Shepp-Logan模型分布, 如图3(a)所示. 对表1中列出的不同投影矢量条件下的三维Mojette变换投影及重建进行数值仿真.
| 条件 | 投影矢量 | (7)式是否满足 | 是否能精确重建 |
| Case 1 | (15, 1, 1), (13, 1, 1), (9, 1, 1), (7, 1, 1), (4, 1, 1) | √ | 是 |
| Case 2 | (15, 1, 1), (13, 1, 1), (9, 1, 1), (7, 1, 1), (3, 1, 1) | × | 否 |
| Case 3 | (1, 15, 1), (1, 13, 1), (1, 9, 1), (1, 7, 1), (1, 4, 1) | √ | 是 |
| Case 4 | (1, 15, 1), (1, 13, 1), (1, 9, 1), (1, 7, 1), (1, 4, 1) | × | 否 |
| Case 5 | (1, 1, 15), (1, 1, 13), (1, 1, 9), (1, 1, 7), (1, 1, 5) | √ | 是 |
| Case 6 | (1, 1, 15), (1, 1, 13), (1, 1, 9), (1, 1, 7), (1, 1, 3) | × | 否 |
表1模拟仿真中采用的不同投影矢量
Table1.Projection vectors used in simulation.
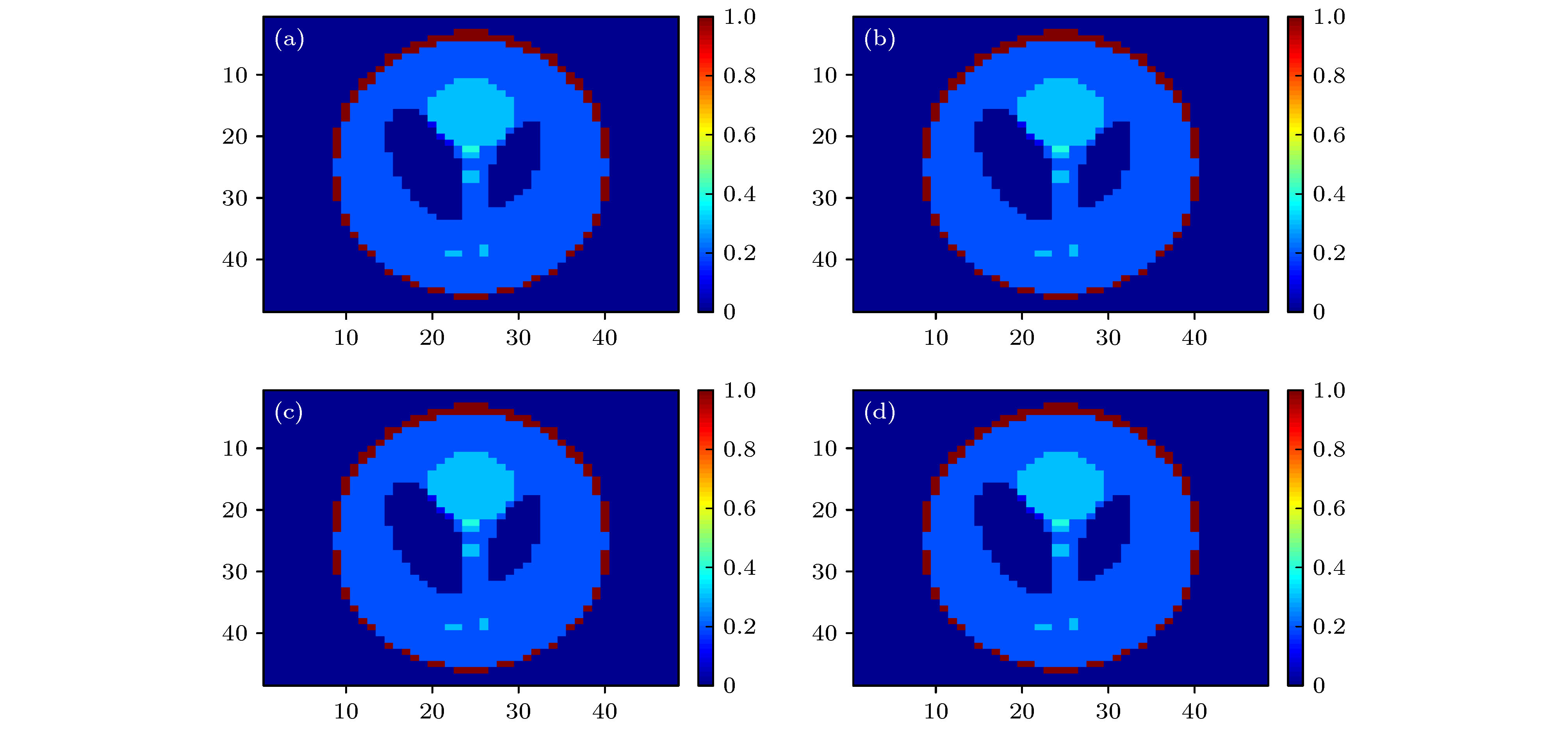 图 3 满足精确重建条件下不同投影矢量的重建结果 (a) 模拟物体; (b) Case 1; (c) Case 3; (d) Case 5
图 3 满足精确重建条件下不同投影矢量的重建结果 (a) 模拟物体; (b) Case 1; (c) Case 3; (d) Case 5Figure3. Reconstruction results of different projection vectors under accurate reconstruction condition: (a) Simulative object; (b) Case 1; (c) Case 3; (d) Case 5.
图3(b)—(d)分别为Case 1, Case 3和Case 5三种满足精确重建条件时的重建结果. 可以看出, 当选取的投影矢量满足精确重建条件时, 都可以进行精确的层析重建. 在相同的投影角度数下, 即使一个投影矢量发生变化使得精确重建条件不满足, 就得不到正确的重建结果. 数值模拟实验验证了精确重建条件的正确性.

确定最优投影向量的具体步骤如下.
步骤1 确定满足(8a)式、(8b)式和(8e)式的所有投影矢量

步骤2 根据(8c)式, 要满足精确重建条件有三种方案, 即









步骤3 选择步骤2中确定的三种方案投影角度数的最小值, 其投影矢量即为最优的投影角度布局方案. 或者在实际的测量系统中, 根据测试条件对投影角度的限制, 选择三种方案中最好实现的一种为最优投影角度布局方案.
以


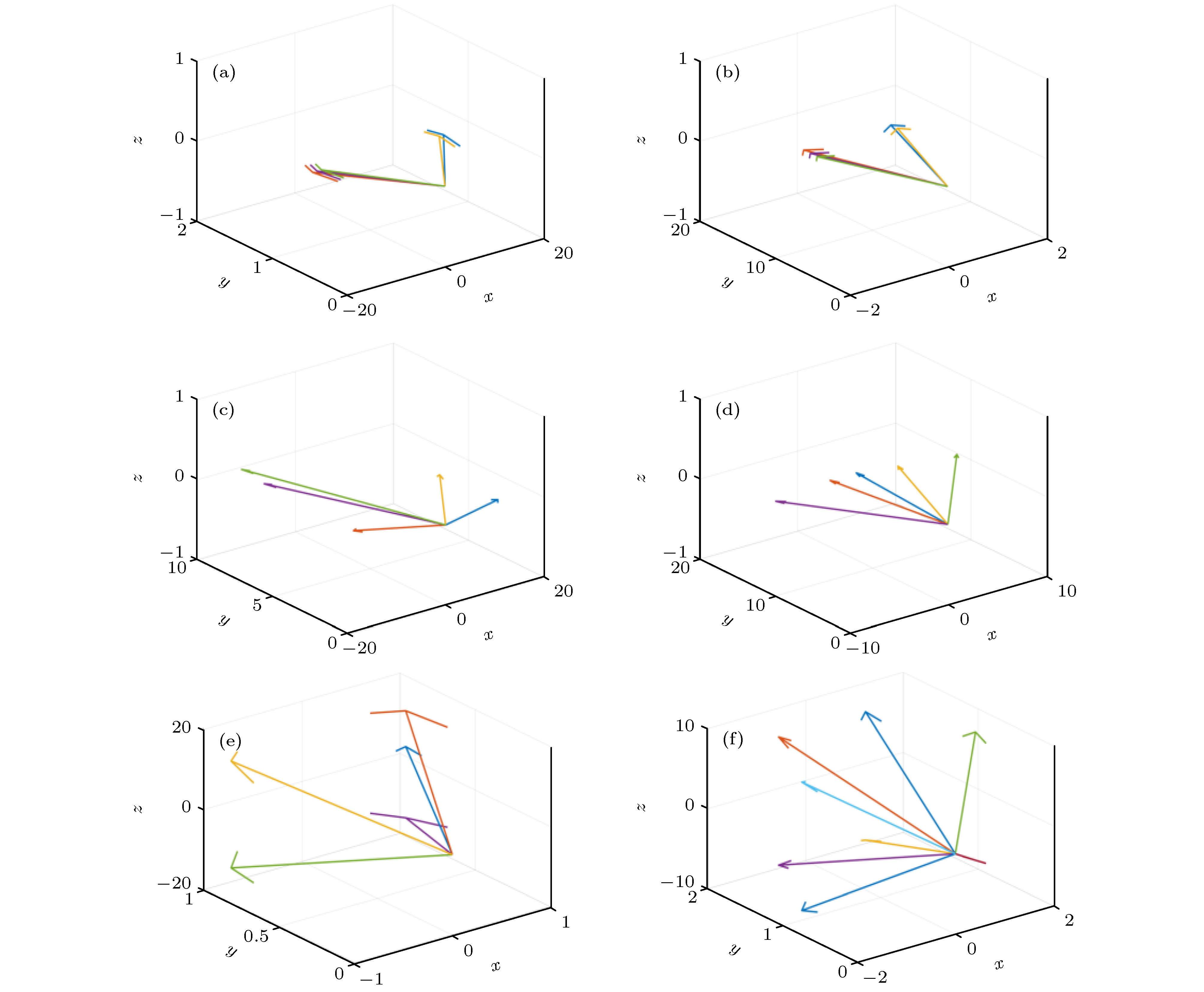 图 4 不同投影矢量对应的投影角度空间分布 (a)方案1; (b)方案2; (c)方案3; (d)方案4; (e)方案5; (f)方案6
图 4 不同投影矢量对应的投影角度空间分布 (a)方案1; (b)方案2; (c)方案3; (d)方案4; (e)方案5; (f)方案6Figure4. Spatial distribution of projection angles corresponding to different projection vectors: (a) Scheme 1; (b) Scheme 2; (c) Scheme 3; (d) Scheme 4; (e) Scheme 5; (f) Scheme 6.
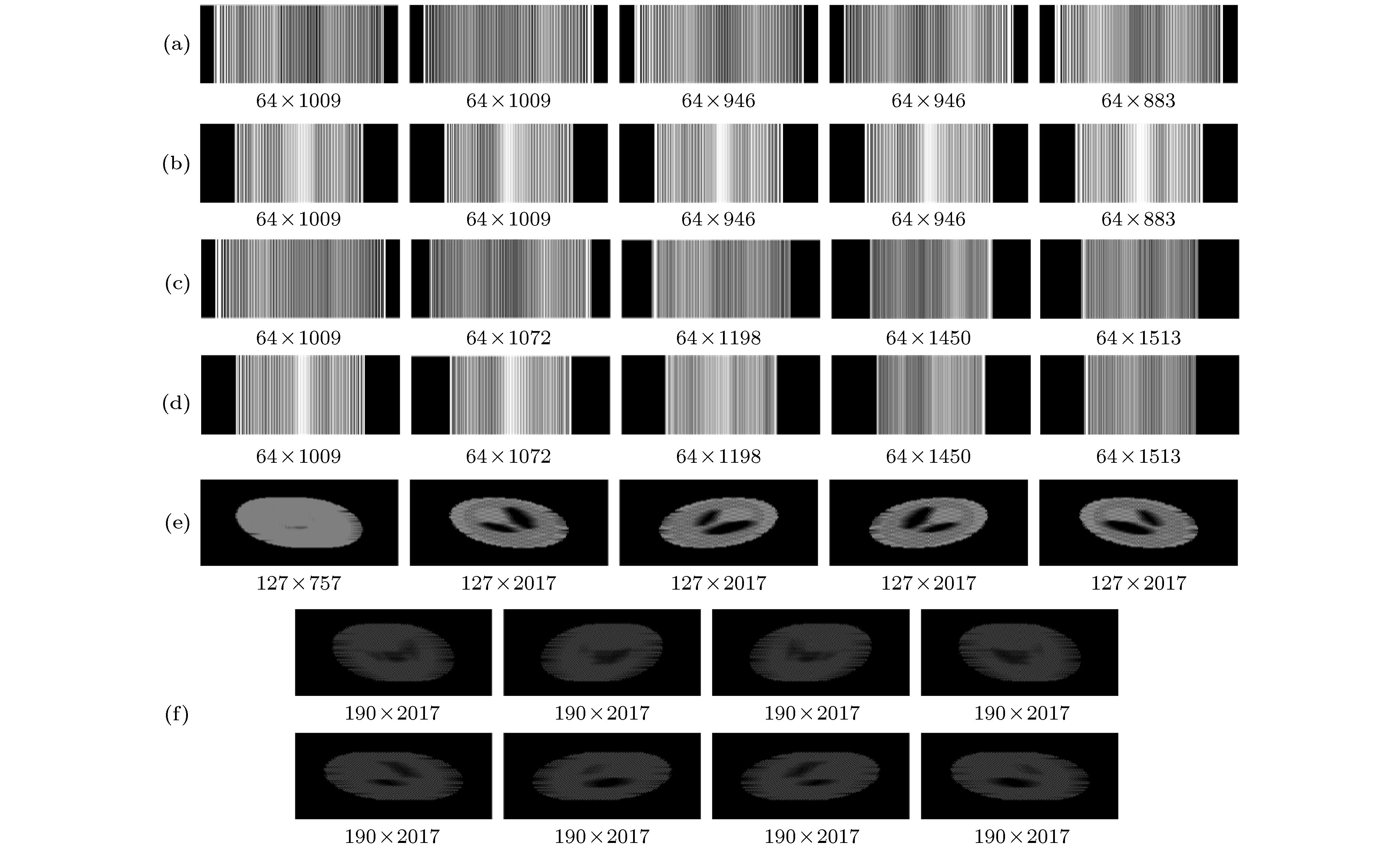 图 5 不同投影矢量对应的投影结果 (a)方案1; (b)方案2; (c)方案3; (d)方案4; (e)方案5; (f)方案6
图 5 不同投影矢量对应的投影结果 (a)方案1; (b)方案2; (c)方案3; (d)方案4; (e)方案5; (f)方案6Figure5. Projections corresponding to different projection vectors: (a) Scheme 1; (b) Scheme 2; (c) Scheme 3; (d) Scheme 4; (e) Scheme; (f) Scheme 6.
当




若选取的投影矢量中



图4和图5的结果综合表明: 在探测器像素数受限的条件下, 最优的投影角度布局方案为水平面投影, 即基于二维Mojette变换的层析重建, 此时所需投影角的数目最少. 并且不论投影角度是否受限, 其所需的投影探测器的像素数都比三维布局方案的少. 这种方式与传统层析技术中所选取的探测器的空间布局方案完全一致. 当投影矢量无法满足水平面投影时, 要选择





