摘要: 激光扫频干涉测量技术具有无测距盲区、非接触、单次测量多目标的能力. 通过傅里叶变换可提取目标拍频频率, 进而解算距离. 然而受激光器调频带宽限制, 通过傅里叶变换得到的目标分辨率受限于固有分辨率. 为解决该问题, 本文提出采用基于旋转不变技术的信号参数估计(ESPRIT)算法对测量信号进行频谱分析. 实验通过插值拟合法校正测量信号拍频非线性, 进而采用ESPRIT算法测量目标距离, 结果表明在傅里叶变换算法无法区分临近目标频率的情况下, 采用ESPRIT算法可以区分出目标的频率, 通过计算可得被测目标的厚度为2.08 mm. 从而为诸如光纤临近损伤点、薄台阶高度或小孔等测量提供了思路.
关键词: 激光扫频干涉测量 /
快速傅里叶变换 /
基于旋转不变技术的信号参数估计算法 English Abstract Laser frequency scanning interferometry based on estimating signal parameters via rotational invariance technique Xu Jing-Xiang Kong Ming Xu Xin-Ke College of Metrology and Measurement Engineering, China Jiliang University, Hangzhou 310018, China Fund Project: Project supported by the Natural Science Foundation of Zhejiang Province, China (Grant No. LY19F050008)Received Date: 16 July 2020Accepted Date: 02 September 2020Available Online: 23 January 2021Published Online: 05 February 2021Abstract: The laser frequency scanning interferometry, as a non-contact method, has non-ranging blind zone and achieves multi-target testing in a single measurement. The beat frequency of target can be extracted by Fourier transform, and then the distance can be solved. However, due to the limitation of laser frequency modulation bandwidth, the resolution of target obtained by Fourier transform is limited to the inherent resolution. In order to solve this problem, in this paper we propose to use the estimating signal parameter via rotational invariance technique (ESPRIT) to perform spectrum analysis on the measured signal. In the experiment, the resampling method is adopted to correct the non-linearity of the measured signal beat frequency, and then the ESPRIT algorithm is used to obtain the target distance. The results show that the Fourier transform algorithm cannot distinguish the target signal from the frequencies of adjacent target, but the ESPRIT algorithm can do. The thickness of the measured target is 2.08 mm. This provides ideas for measuring, such as damage point in the proximity of the fiber, height of thin step, or small hole.Keywords: laser frequency scanning interferometry /fast Fourier transform /estimating signal parameter via rotational invariance technique algorithm 全文HTML --> --> --> 1.引 言 激光测距具有测距范围大、抗干扰能力强、分辨率高等诸多优点, 被广泛应用于光学探测、三维形貌测量和工业制造等领域. 常用的激光测距方法有光频梳法、干涉法、相位法和脉冲法等. 激光扫频干涉测量技术属于光学干涉测量技术的一种, 该技术将调频测距的原理和激光的优点相结合, 可以实现多目标、非接触、高精度的绝对测距, 在工业制造和科学研究中具有重要的价值[1 -5 ] .[6 -8 ] . 该技术的测量分辨率与可调激光器的调频带宽有关, 当激光器的调频带宽达到几十至上百GHz时, 测量分辨率可达到毫米级. 为了提高激光测距系统的测量分辨率, 可以通过增大激光器的调频带宽. 2001年, Schneider[9 ] 利用干涉仪在反馈环路中补偿激光器的非线性, 并采用对称扫频的方法消除环境带来的振动干扰, 在调频带宽为15 GHz时的测距精度为毫米级. 2010年, Arseny 等[10 ] 利用算法将三个可调激光器的光谱相结合, 使扫描范围提高至原来的三倍, 从而使测量分辨率提高了三倍. 2011年, 于啸等[11 ] 对调频连续波雷达技术的测距测速分辨率进行测试和分析, 实验结果表明该系统的测距精度达到厘米级, 测速精度可达到毫米级. 2015年, 孟祥松等[12 ] 提出了基于重采样技术的高速测量方法, 对多次不同测量的等光频间隔采样的信号进行拼接, 实现了对激光器调制带宽的拓展, 从而提高了测量分辨率.[13 -19 ] .2.原 理 22.1.激光扫频干涉测距系统示意图 2.1.激光扫频干涉测距系统示意图 本文中的激光扫频干涉测距系统如图1 所示, 分布式反馈(DFB)激光器与两个光路相连. 一个是主光路, 用于目标的测量, 主要构成为迈克耳孙干涉仪. 另一个是辅助光路, 主要构成是马赫-曾德尔干涉仪, 其输出的信号用于对被测目标的采样信号进行重采样, 目的是校正DFB激光器的调频非线性, 两路延迟单模光纤的作用是改变两个光路的光程. 首先, DFB激光器99%的能量进入主光路, 然后再次经过99∶1的分束器, 将99%的能量用于测量光, 剩余的1%用于参考光路, 两部分信号在耦合器中耦合后, 探测器1获得主光路最终的输出信号. 同时, DFB激光器剩余的1%的能量进入辅助光路后, 被50∶50分束器分为两路, 并由探测器2接收输出的信号. 探测器1和探测器2将接收到的光信号转换成电压信号, 并将其传输到数据采集卡.图 1 激光扫频干涉测距系统示意图Figure1. Schematic diagram of laser scanning interference ranging system.图2 所示. DFB发出的线性调频光, 经过分光镜PBS后被分为两束. 一束作为本振光, 到达系统内部的反射镜后, 被反射进入探测器. 一束作为测量光, 达到目标后返回, 在探测器中与本振光发生干涉产生拍频信号[20 -24 ] .图 2 激光拍频干涉测距原理图(PA, 检偏器)Figure2. Schematic diagram of laser beat frequency interference ranging (PA, polarization analyzer).图3 所示. 假设DFB激光器发出的线性调频光频率为图 3 激光扫频干涉测量拍频形成原理图Figure3. Schematic diagram of beat frequency formation in laser frequency scanning interferometry.${\omega _0}$ 为调频起始角频率, ${f_0}$ 为调频起始频率, ${\varOmega} = 2{\text{π}}B$ 为角调频带宽, $k = B/{T_{\rm{m}}}$ 为调频斜率, ${T_{\rm{m}}}$ 为调频周期, ${\omega _{\rm{L}}}\left( t \right)$ 为本振光频率, 则主光路中的本振光信号可以表示为${A_{\rm{L}}}$ 为振幅. 主光路中的测量光信号为${A_{\rm{T}}}$ 为测量光的振幅, c 为光速, ${R_t}$ 为被测目标与激光测距系统相距的距离, ${n_{{\rm{air}}}}$ 是空气折射率, ${\tau _t} = {{{R_t}{n_{{\rm{air}}}}}}/{c}$ . 本振光和测量光在探测器中形成的光电流, 最终输出可以表示为${I_{\rm{a}}}$ 为平均光强, ${\xi _{\rm{H}}}$ 为外差干涉效率. 第一项和第二项是直流项, 第三项和第四项分别为在探测器上形成的和频项与差频项. 直流项不含被测目标的距离信息, 通过带通滤波器可将其滤除. 和频项其频率超过探测器的响应范围, 该项可不考虑. 差频项为本振光与测量光光频之差, 当频差小于探测器的截止频率时, 有光电流输出. 可表示为5 )式表明测量信号为余弦形式的信号. 对其进行频谱变换可以得到被测目标的拍频频率${f_{\rm{b}}} = 2{R_t}{n_{{\rm{air}}}}B/\left( {c{T_{\rm{m}}}} \right)$ .$\Delta {f_{\rm{b}}} = 1/{T_{\rm{m}}}$ , 代入(5 )式可以得到激光扫频干涉绝对距离测量的分辨率为[25 ] 2.2.插值拟合法理论模型 -->2.2.插值拟合法理论模型 为了校正DFB激光器的调频非线性对测量的影响, 本次实验采用插值拟合法对测量光信号进行非线性校正, 该方法的理论模型如下. 设辅助光路中由延迟单模光纤形成的光纤长度差为${R_1}$ , 折射率为${n_1}$ , 形成的时间延迟为${\tau _1} = {{{R_1}{n_1}}}/{c}$ , 则辅助光路中的信号可以表示为$f\left( t \right)$ 是激光器的瞬时频率. 将该信号对主光路中的信号做插值拟合法, 时刻选择的是$I'_{\rm{L}}$ 每经过一个周期上升沿的过零点时刻, 即$I'_{\rm{L}} = 0$ 时, 可以得到N 是辅助光路信号过零点的个数, 进而可以得到${R_2}$ , 折射率同样为${n_1}$ , 在拍信号中形成的时间延迟为${\tau _2} = {{{R_2}{n_1}}}/{c}$ . 由于主光路和辅助光路中的激光信号来自于同一个激光器, 因此同一时刻下两光路中信号的瞬时频率相同, 主光路的信号可以表示为10 )式代入(11 )式得到:${\tau _1}$ , ${\tau _{\rm{2}}}$ 为常数项, 当${R_t}$ 确定时, ${\tau _t}$ 也是一个定值. (12 )式表明经过插值拟合法对测量信号进行非线性校正以后, 测量信号变成了以k 为自变量的余弦信号, 与激光器瞬时频率$f\left( t \right)$ 无关, 即采用插值拟合法可以校正测量信号的拍频非线性.2.3.ESPRIT算法原理 -->2.3.ESPRIT算法原理 由上述分析可知, 测量信号为余弦信号, 为提高测量分辨率, 本文提出采用现代谱估计中的ESPRIT算法进行频谱分析. 经典谱估计以傅里叶变换为基础, 该方法是将数据工作区以外的未知数据假设为零, 相当于数据加窗, 这并不符合实际. 与经典谱估计相比, 现代谱估计是通过观测数据估计参数模型, 再按照求参数模型输出功率的方法估计信号功率谱, 进而提高了谱估计的分辨率. ESPRIT算法的具体原理如下.$x\left( n \right)$ 可以表示为一系列幅值按指数规律变化的余弦信号与白噪声的组合, 当该信号入射到一个有M 个阵元的平面阵列上, 在采样时刻n , 其输出数据的矩阵模型如下:${T_{\rm{s}}}$ 为采样周期; ${a_p}$ , ${\phi _p}$ , ${\omega _p}$ , ${\sigma _p}$ 是第p 个衰减分量的幅值、初始相位、频率和衰减系数; $w\left( n \right)$ 为噪声.$x\left( 0 \right)$ , $x\left( 1 \right)$ , ···, $x\left( {N - 1} \right)$ 构造出一个Hankel数据矩阵:${{Y}} = \left[ {{y_1}, {y_2}, \cdots , {y_p}} \right]$ , ${{A}} = \big[ {a_1}{{\rm{e}}^{{\rm{j}}{\varphi _1}}}, {a_2}{{\rm{e}}^{{\rm{j}}{\varphi _2}}}, \cdots , {a_p}{{\rm{e}}^{{\rm{j}}{\varphi _p}}} \big]^{\rm T}$ , 可将(13 )式改为y Φ ${\rm{j}}{\omega _1}, {\rm{j}}{\omega _2}, \cdots , {\rm{j}}{\omega _p}$ 是(13 )式中的频率. 设${U_1}$ , ${U_2}$ 是两个交错的长度为$M - 1$ 的数据矩阵, 视为长度为M 的数据矩阵的子窗口, 有X $\mathop = \limits^{{\rm{svd}}} $ 表示奇异值分解; ${{{U}}}^{\rm{H}}{{U}} = {{I}}$ , ${{{V}}}^{\rm{H}}{{V}} = {{{I}}}$ , 其中${{{U}}} \in {C^{L \times L}}$ , ${{{V}}} \in {C^{M \times M}}$ , $\varSigma \in R^{L × M}$ 是一对角阵, 各元素是矩阵X ${\xi _1}$ , ${\xi _2}$ , ···, ${\xi _p}$ , ···, ${\xi _{\max }}\left( {L, M} \right)$ 的降序排列; ${{{V}}_{\rm{s}}}$ 和${{{V}}_{\rm{n}}}$ 分别是信号子空间和噪声子空间.${{{V}}_1}$ , ${{{{V}}}_2}$ 分别是${{{{V}}}_{\rm{s}}}$ 删除最后一行和第一行后得到的新矩阵, 存在旋转矩阵$ {\varPsi} $ , 使得20 )式和(22 )式可知, 矩阵Φ $ {\varPsi} $ 的特征值, 考虑到噪声和干扰误差等因素, 用${{{{E}}}_1}$ , ${{{{E}}}_2}$ 分别表示${{{{V}}}_1}$ , ${{{{V}}}_2}$ 的误差, (22 )式可改为$ {\varPsi} $ 的最优解使(23 )式成立, 同时使得误差矩阵${{{{E}}}_1}$ 和${{{{E}}}_2}$ 的总体误差最小, 最终可以求得频率$f = \dfrac{{{\omega _p}}}{{2\pi {T_{\rm{s}}}}}$ .3.实验及结果 为了验证ESPRIT算法的有效性, 搭建了如图1 所示的激光测距系统对目标进行测量, 其中使用的DFB激光器光源波长为1550 nm, 调频带宽为60 GHz, 测量目标为前表面镀膜的反射镜, 根据(6 )式, 可以求得测距系统的分辨率为2.50 mm. 对目标进行测量时, 数据采集卡同时采集主光路的信号和辅助光路的信号, 利用辅助光路中的信号对测量信号进行插值拟合, 从而消除测量信号的拍频非线性.图4 所示, 可以看出测量信号由于DFB激光器的非线性导致了频谱展宽, 使得无法准确提取出目标频谱中心频率.图 4 未采用插值拟合时信号的频谱图Figure4. Spectral diagram of the signal without interpolation fitting.图5 是非线性校正前的测量信号的时频图, 可以看出随着时间的增加, 频率也随之改变, 这一变化是由激光器的调频非线性造成的.图 5 未采用插值拟合信号的时频图Figure5. Time-frequency diagram of the signal without interpolation fitting.图6 所示, 可以看到图中有一个明显的单一尖峰, 保证了提取目标频率的稳定性. 通过对比图4 和图6 , 可以看出采用插值拟合法后, 大幅度减小了测量信号的频谱展宽, 表明对测量信号进行插值拟合法的非线性校正方法是可行的.图 6 采用插值拟合后信号的频谱图Figure6. Spectral diagram of the signal with interpolation fitting.图7 所示, 可以看出测量信号经过非线性校正后, 频率随时间的增加保持稳定.图 7 采用插值拟合后信号的时频图Figure7. Time-frequency diagram of the signal with interpolation fitting.表1 所列.实际距 FFT算法 MUSIC算法 ESPRIT算法 127.633 –0.005 –0.328 0.007 100.797 –0.013 0.600 0.012 109.165 –0.010 0.230 0.009 99.154 0.003 –0.093 –0.002 124.060 –0.016 –0.621 0.014
表1 不同距离下三种算法的测量结果与实际距离的比较Table1. Comparison of the measurement results of three algorithms and the actual distance under different distances.表1 可知, ESPRIT算法与FFT计算得到的结果与三坐标测量机给出的结果相比, 最大误差是0.016 mm.表2 所列.实际厚度/mm ESPRIT测量结果/mm 误差/mm 15.362 15.327 –0.035 20.291 20.316 0.025 24.144 24.182 0.038
表2 ESPRIT算法对不同厚度的双目标的测量结果与实际厚度的比较Table2. Comparison of the measurement results of the ESPRIT algorithm with the actual thickness of dual targets.表2 可知, ESPRIT算法计算得到的结果与三坐标测量机测量的实际厚度相比, 误差在20—40 μm之间.图8 所示, 图中左侧的尖峰代表的是测量系统的光纤出射端面, 右侧的单一尖峰是被测目标. 由于被测目标由两个反射镜构成, 理论上在经过频谱分析后会获得两个尖峰, 但从图中可以看出只有一个尖峰, 这是由于被测目标之间的距离小于测距系统的分辨率.图 8 被测目标的频谱图Figure8. Spectral diagram of the measured target.图9 所示. 由于只需要被测目标的频率信息, 为了方便计算将幅值信息进行了归一化.图 9 采用ESPRIT算法的结果图Figure9. Result diagram using ESPRIT algorithm.${n_{{\rm{air}}}}$ 改变, 将导致测距值的变化. 实验室中能保持相对稳定的温度、湿度与气压, 经过分析, 折射率${n_{{\rm{air}}}}$ 带来的相对测量不确定度接近${\rm{1}} \times {\rm{1}}{{\rm{0}}^{{\rm{ - 6}}}}$ .${R_1}\left( {{T_{\rm{a}}}} \right)$ 是${T_{\rm{a}}}$ 温度下辅助光路中光纤的长度, ${T_{\rm{a}}}$ 表示某一恒定温度, $g\left( x \right)$ 为光纤折射率与温度相关的函数, ${T_z} = 5.5 \times {10^{ - 7}}$ /℃为光纤的线热膨胀系数, ${D_n}$ 为光纤折射率的温度系数, T 为当前温度.$R\left( {{T_{\rm{a}}}} \right)$ 为${T_{\rm{a}}}$ 温度下被测目标相距的长度, 当环境温度从${T_{\rm{a}}}$ 改变至$T$ 时, 被测目标的时延${\tau _t}$ 与辅助光路的时延${\tau _1}$ 的比值为24 )式代入可得27 )式表明光纤的长度和折射率受到温度变化的影响, 温度每变化一度, 光纤光程的变化量为0.009 mm/m. 温度升高, 被测目标测量的误差也随之增大, 且与被测目标相距越远, 误差越大.4.结 论 本文采用ESPRIT算法来提高激光测距系统的分辨率. 首先研究了激光扫频干涉测量的原理, 搭建了双干涉光路的激光测距系统. 本次实验利用辅助光路的信号对主光路的测量信号进行插值拟合的方法, 从而消除测量信号的拍频非线性. 接着利用ESPRIT算法对测量信号进行处理, 最终可以计算得到被测目标的厚度. 结果表明ESPRIT算法可以进一步提高激光测距系统的分辨率. 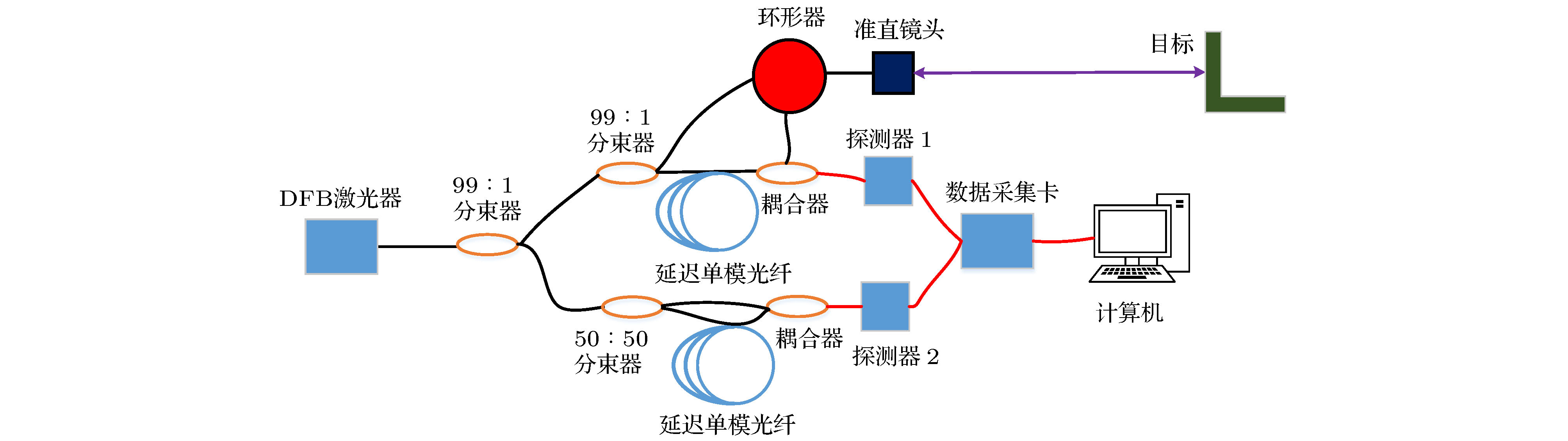 图 1 激光扫频干涉测距系统示意图
图 1 激光扫频干涉测距系统示意图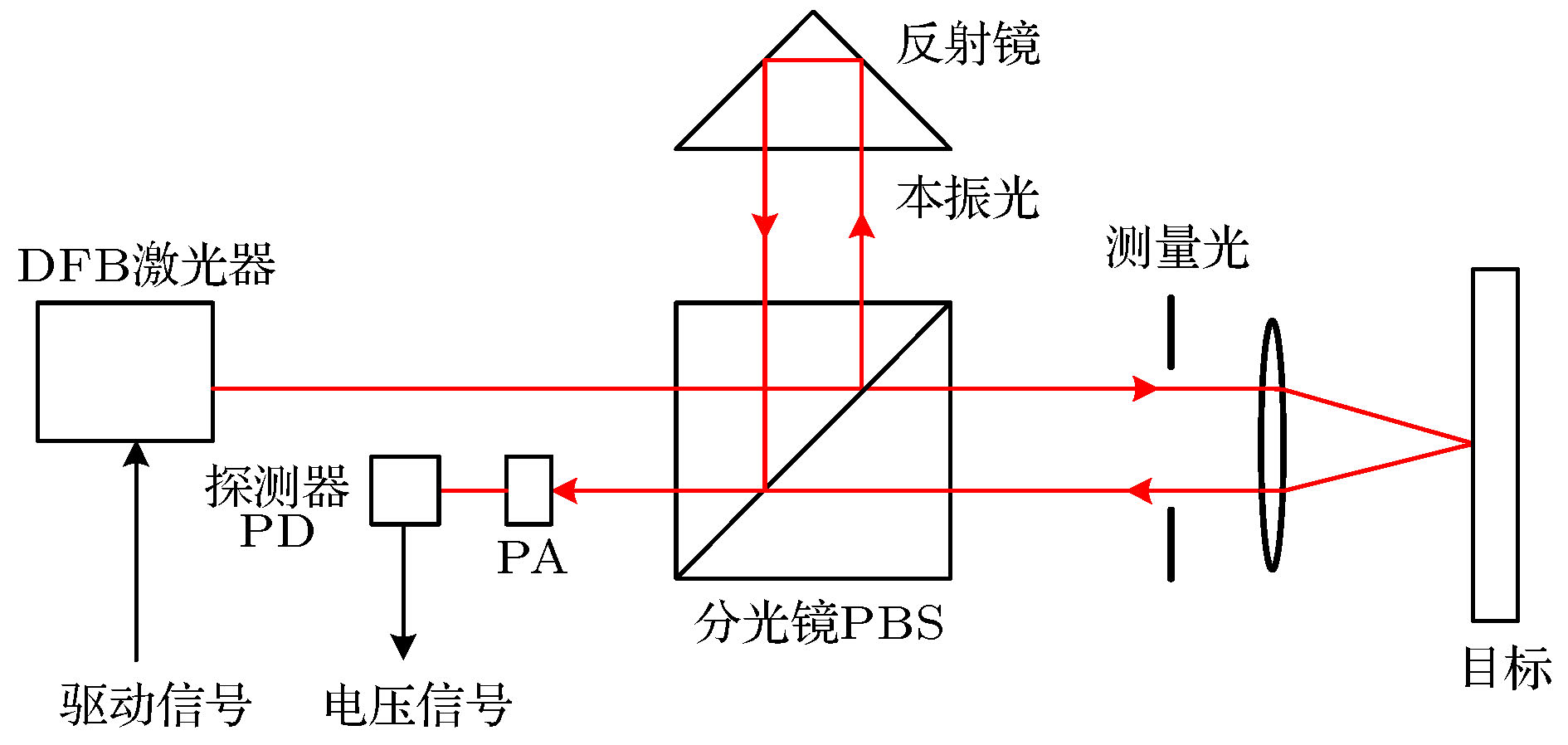 图 2 激光拍频干涉测距原理图(PA, 检偏器)
图 2 激光拍频干涉测距原理图(PA, 检偏器)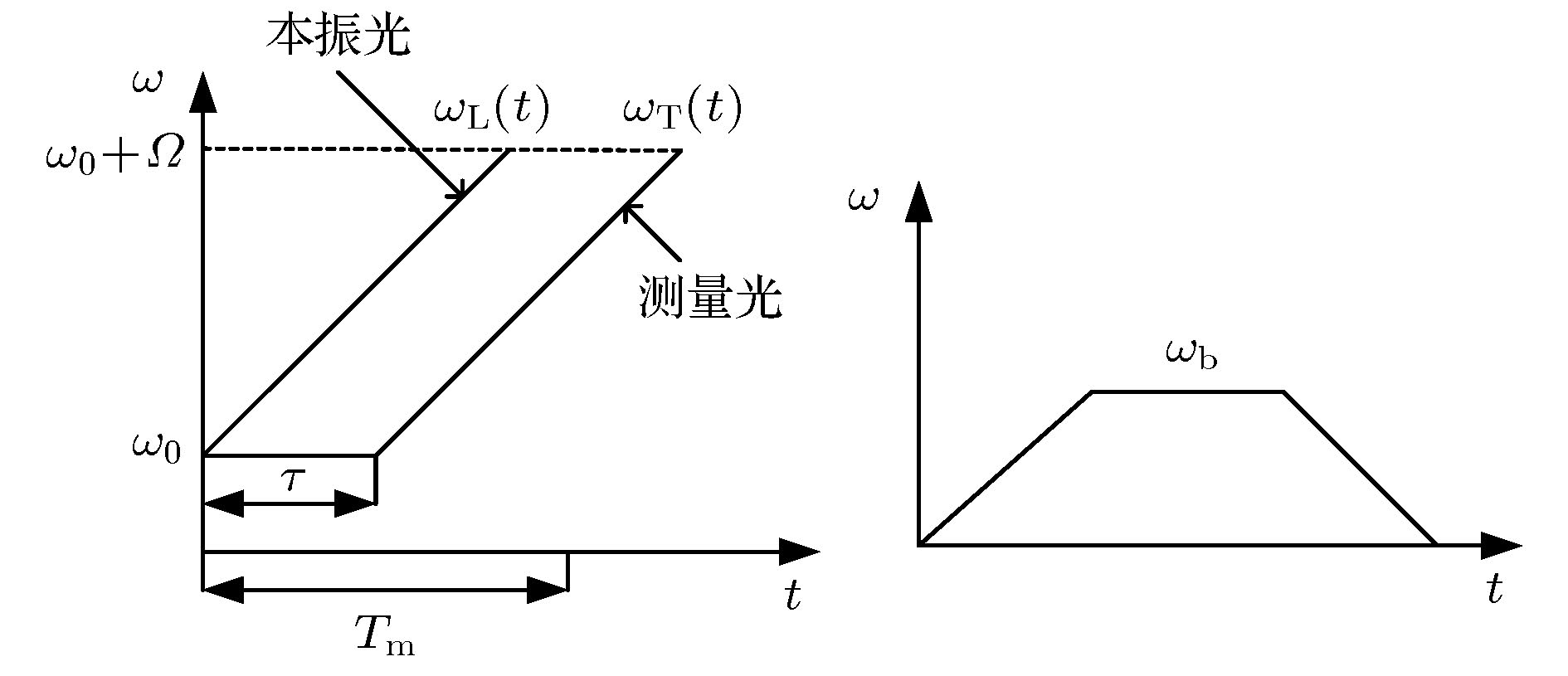 图 3 激光扫频干涉测量拍频形成原理图
图 3 激光扫频干涉测量拍频形成原理图





































































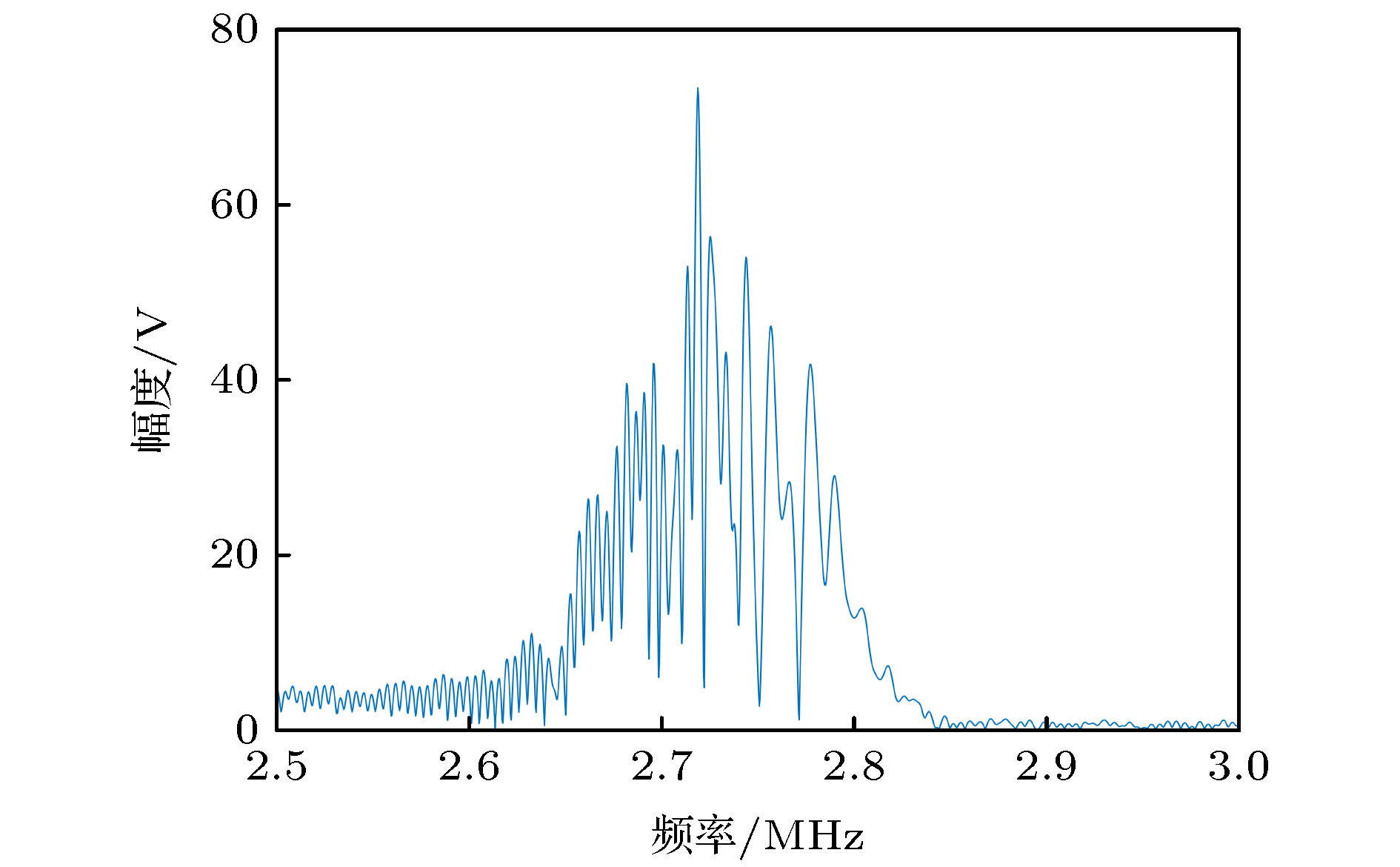 图 4 未采用插值拟合时信号的频谱图
图 4 未采用插值拟合时信号的频谱图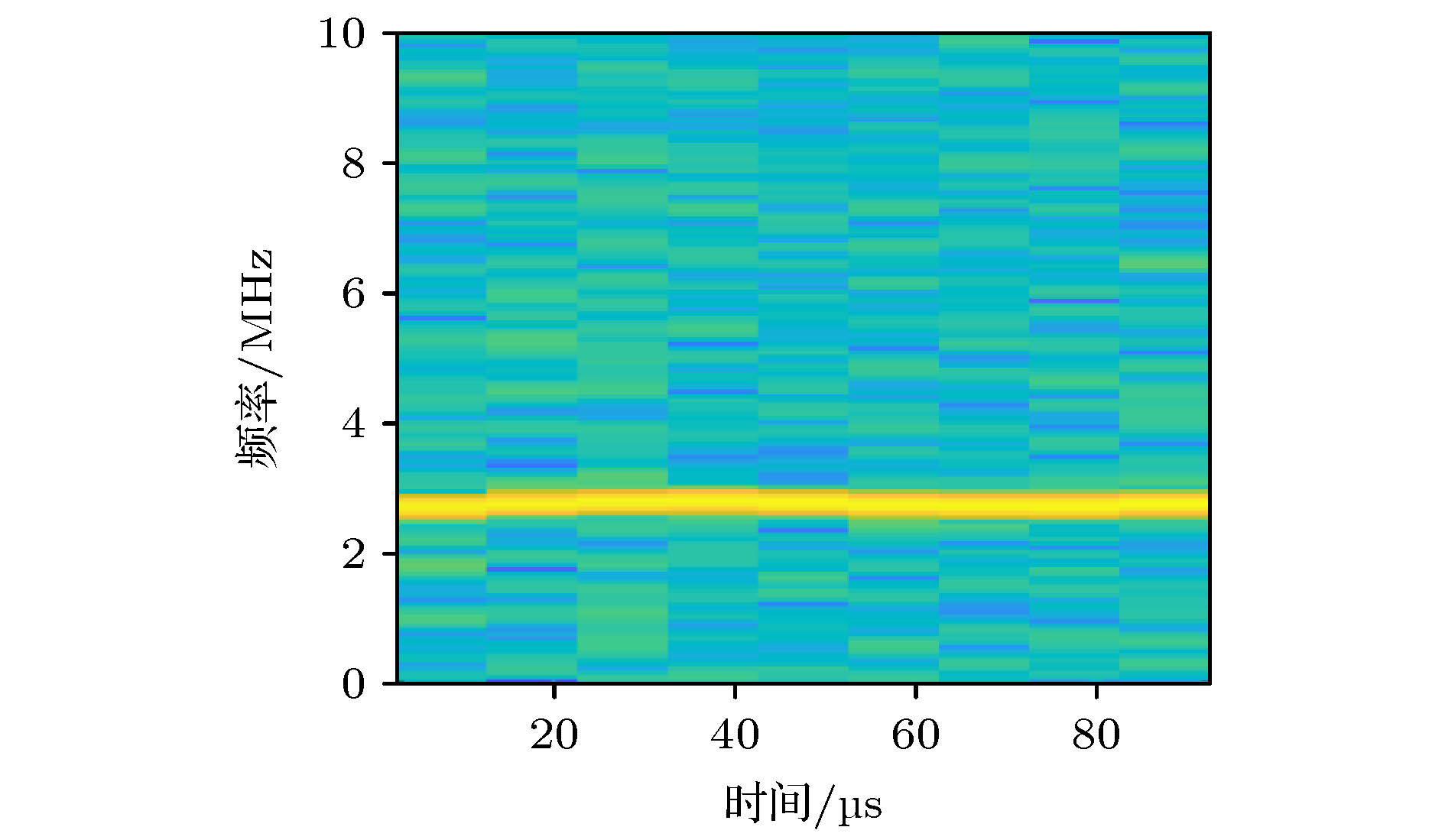 图 5 未采用插值拟合信号的时频图
图 5 未采用插值拟合信号的时频图 图 6 采用插值拟合后信号的频谱图
图 6 采用插值拟合后信号的频谱图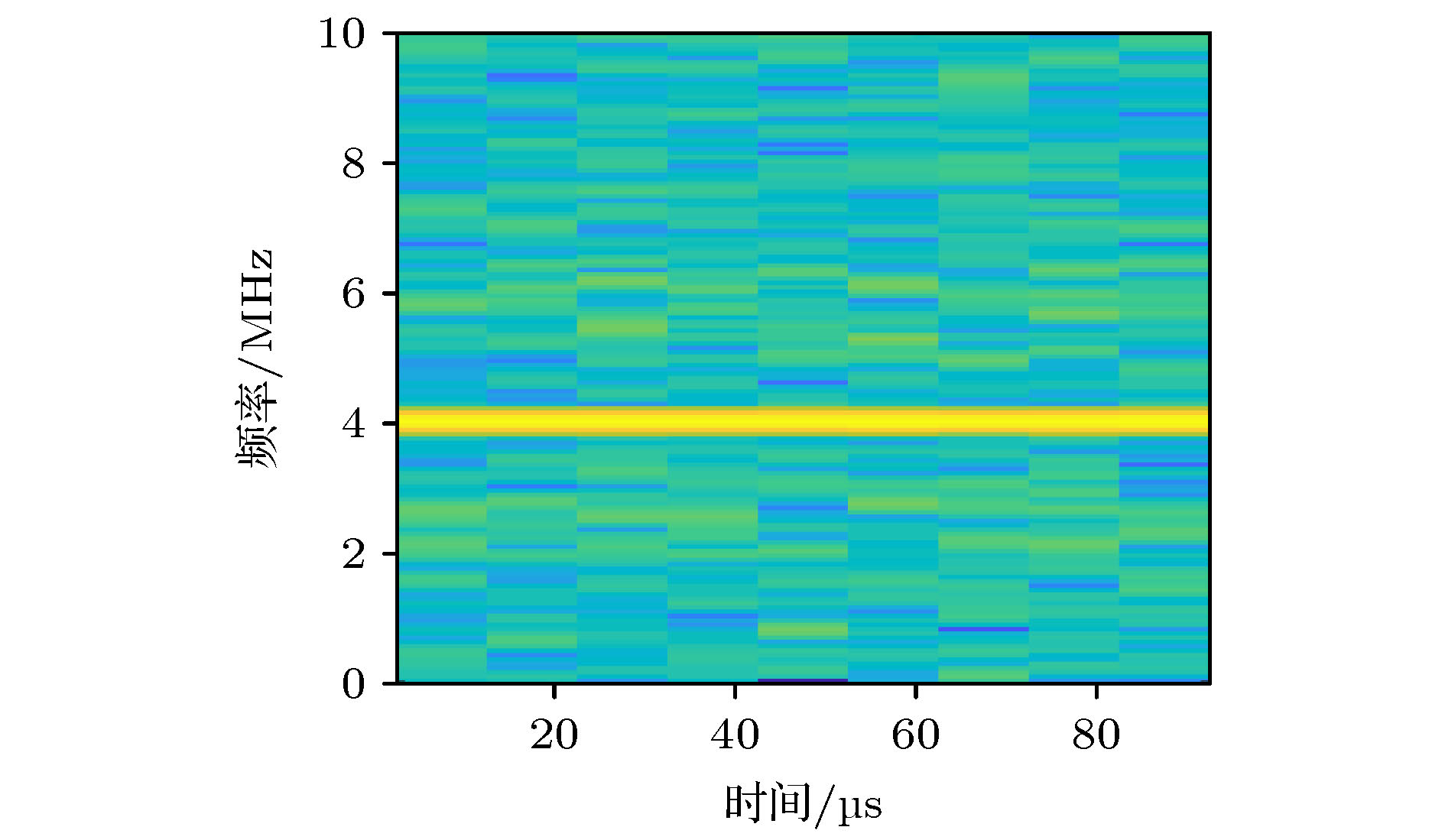 图 7 采用插值拟合后信号的时频图
图 7 采用插值拟合后信号的时频图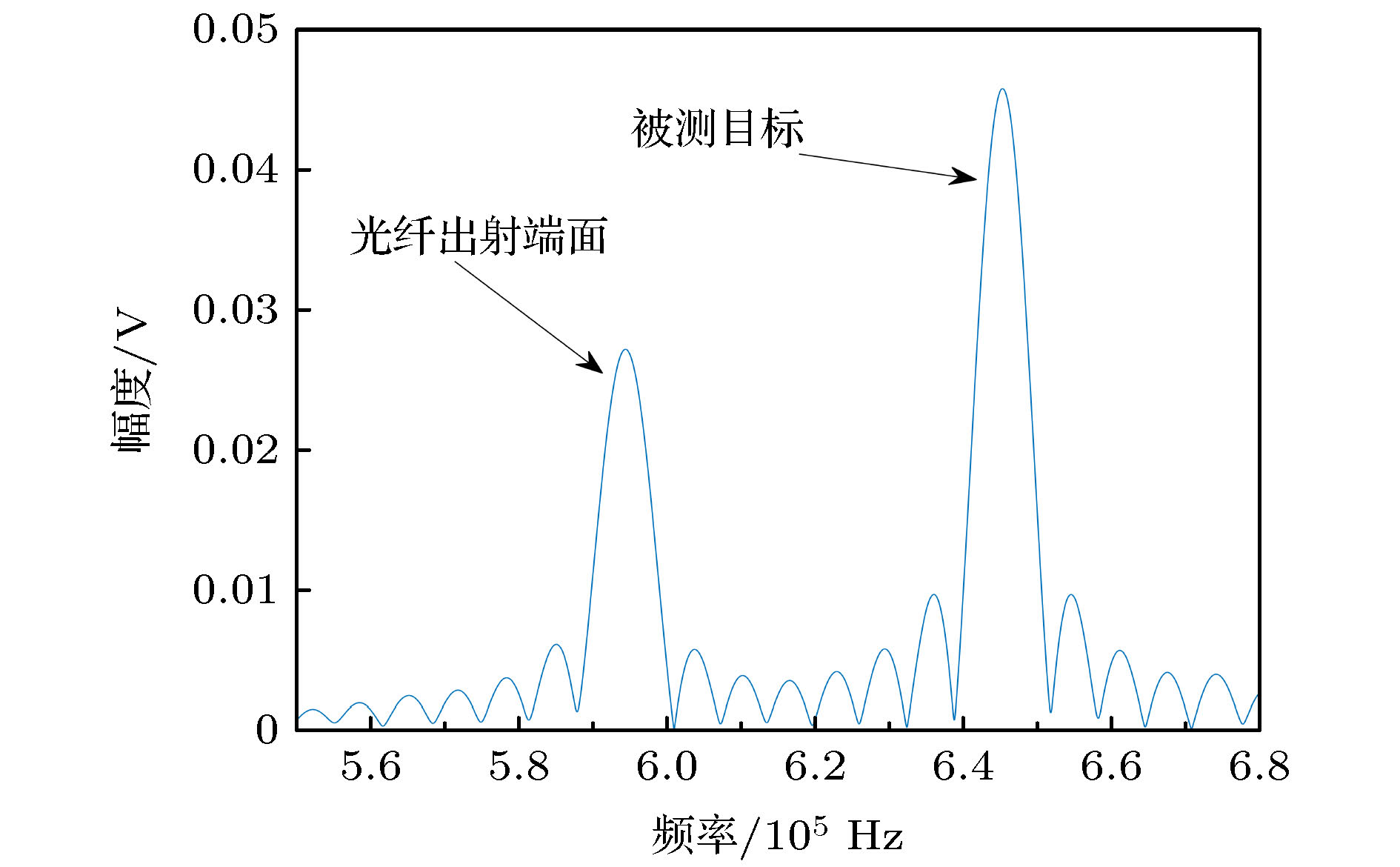 图 8 被测目标的频谱图
图 8 被测目标的频谱图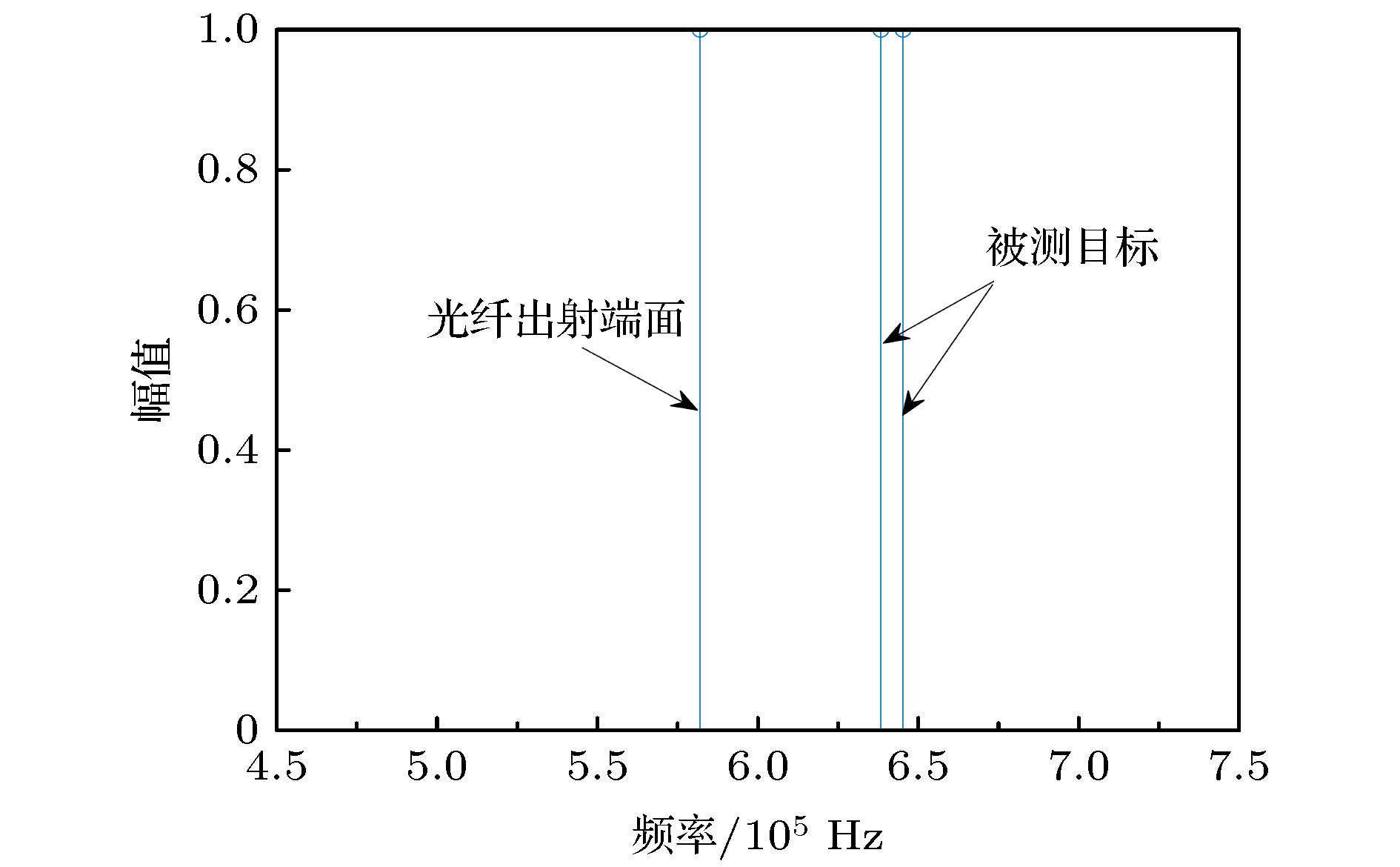 图 9 采用ESPRIT算法的结果图
图 9 采用ESPRIT算法的结果图














