摘要: 提出了一种循环噪声驱动下非对称双稳系统驻留时间分布函数的理论计算方法. 利用具有分段逃逸速率的两态模型理论, 建立分段逃逸速率方程, 分段地推导出了驻留时间分布函数的解析表达式. 在此基础上, 从理论和数值模拟两方面阐明了在非对称性及循环噪声的影响下驻留时间分布函数呈现出反馈结构. 研究结果表明: 当非对称性、循环噪声的相关强度及循环滞后时间取适当值时均会造成驻留时间分布函数呈现出分段指数衰减现象且在循环滞后时间处出现骤然下降的趋势. 随着非对称性的减小, 驻留时间分布函数指数衰减的速率加快并出现单调指数衰减现象. 分别增大相关强度和循环滞后时间, 驻留时间分布函数在循环滞后时间处骤然下降的间距变小. 此外, 驻留时间分布函数在循环滞后时间处的值会随着噪声强度和相关强度的改变出现极大值, 说明系统发生了随机共振现象.
关键词: 循环噪声 /
非对称双稳系统 /
驻留时间分布函数 /
随机共振 English Abstract Residence-times distribution function in asymmetric bistable system driven by noise recycling Wu Ya-Zhen 1,2 ,Sun Zhong-Kui 2 1.School of Mathematics and Information Technology, Yuncheng University, Yuncheng 044000, China Fund Project: Project supported by the National Natural Science Foundation of China (Grant Nos. 11772254, 11742013, 61703363)Received Date: 14 November 2019Accepted Date: 31 March 2020Published Online: 20 June 2020Abstract: Residence-times distribution function (RTDF), as a distribution function of times between two consecutive switches in a bistable system, is extensively used to characterize the phenomenon of stochastic resonance (SR). However, most of the studies focus on the symmetric bistable systems. As a matter of fact, the majority of asymmetric systems encountered in nature are more universal and practical. Additionally, due to the combination of diverse propagations or transduction mechanisms, noise recycling, constituted by the superposition of a master noise with a secondary component delayed by a time shift τ , can be generated while a noise is injected into a system and transmitted across the system. Therefore, an asymmetric system subjected to noise recycling is no longer non-Markovian. As a result, it is essential to take the special correlation of noise recycling into account when studying the transition dynamics of particles, which makes it difficult to obtain the analytical formula of RTDF. To solve the above problem, a theoretical method to calculate the RTDF of an asymmetric bistable system driven by noise recycling is put forward in this paper. By using the two-state model with piecewise escape rate, the piecewise escape rate function can be established, based on which the RTDF is derived theoretically with a piecewise formula. It is emphatically demonstrated theoretically and numerically that the RTDF exhibits a feedback-induced structure due to the asymmetry of system. Meanwhile, the effects of relative strength and recycling lag on the structure of RTDF are investigated theoretically and numerically. The results are shown as follows: when the asymmetry satisfies γ > 0 and taking γ as the appropriate values, the RTDF decays exponentially and exhibits a sharp dip at t = τ . Nevertheless, on the contrary, under the condition for γ < 0, the dip at t = τ of RTDF almost disappears and the rate of decay of RTDF turns to increase. When the relative strength and recycling lag take the appropriate values separately, the RTDF displays piecewise exponential decay and declines sharply at t = τ . It is worth noting that the interval between discontinuities becomes smaller, or even disappears with the relative strength and recycling lag increasing separately. Further, the value of RTDF at t = τ presents a maximum value with the noise intensity and the relative strength varying, which illustrates that the noise recycling procedure can play a crucial role in inducing the phenomenon of SR in the asymmetric bistable system.Keywords: noise recycling /asymmetric bistable system /residence-times distribution function /stochastic resonance 全文HTML --> --> --> 1.引 言 在非线性系统中, 增加适量的噪声不但不会降低输入信号的周期性输出, 反而在一定程度上增加了系统的输出信噪比, 即输入信号与噪声之间产生了协同效应, 这就是经典的“随机共振”[1 ,2 ] 现象. 随机共振的提出让人们不再认为噪声只有负面影响, 相反, 噪声在自然界中也是可以发挥积极作用的. 随后, 人们对随机共振及相关问题展开了研究并提出了量化随机共振现象的度量指标, 如信噪比[3 -6 ] 、线性响应[7 -9 ] 、驻留时间分布函数[10 -16 ] 等. 这些度量指标作为与噪声相关的函数, 随着噪声强度的改变, 若出现极大值则说明发生随机共振现象. 然而, 已有实验证明, 当把噪声注入到系统中时, 通过不同渠道的耦合噪声会发生分裂且分裂成多个含有时滞项的同源噪声, 此类噪声被称为循环噪声[17 ,18 ] . 用$\zeta \left( t \right)$ 表示该噪声, 考虑最简单的情形, 可表示为$\xi \left( t \right)$ 是主噪声项, $\varepsilon \xi \left( {t - \tau } \right)$ 是噪声循环(第二噪声)项, $\varepsilon $ 表示相关强度, $\tau $ 表示循环滞后时间.[19 -29 ] , 如诱导随机同步[19 ] 、控制相干共振[20 ] 、增强系统稳定性[22 ] 、诱导随机分岔[28 ] 等. 特别地, Sun等[23 ,24 ] 建立了循环噪声驱动下双稳系统的两态模型理论并研究了该系统的共振动力学行为. 随后, 将该系统推广到了循环噪声驱动的时滞双稳系统上, 研究结果表明循环噪声能够调制时滞双稳系统的共振动力学行为[25 ] . 文献[23 —25 ]以对称双稳系统展开研究, 探讨了循环噪声对信噪比、线性响应及驻留时间分布函数结构的影响. 然而, 在许多实际的物理系统中对称性是难以保证的, 非对称系统更为普遍和具有实用价值, 因此研究非对称双稳系统的共振动力学现象应用前景更为广阔. 而如何计算循环噪声驱动下非对称性双稳系统的驻留时间分布函数以及非对称性对该系统驻留时间分布函数结构的影响目前还未被涉及.2.模型及逃逸速率 考虑循环噪声驱动下的非对称双稳系统, 模型可用如下朗之万方程表示:$\gamma $ 表示势阱的非对称性, $\xi \left( t \right)$ 是高斯白噪声, 其统计性质满足$\left\langle {\xi \left( t \right)} \right\rangle \!=\! 0$ , $\left\langle {\xi \left( {t + t'} \right)\xi \left( t \right)} \right\rangle \!= \! 2\delta \left( {t'} \right)$ . 令$\zeta \left( t \right) = \xi \left( t \right) + \varepsilon \xi \left( {t - \tau } \right)$ , 则$\zeta \left( t \right)$ 表示循环噪声, 此时$\zeta \left( t \right)$ 满足$\zeta \left( t \right)$ 在“0”和“$ \pm \tau $ ”处均是自相关的, 由此可知循环噪声与高斯白噪声的统计特性不同.$ - \sqrt {\dfrac{4}{{27}}} < \gamma < \sqrt {\dfrac{4}{{27}}} $ 时, 令$V'\left( x \right) = 0$ 可得该系统的两个稳定点和一个不稳定点. 记${x_ \mp }$ 表示处在左右势阱的两个稳定点, ${x_{\rm{u}}}$ 为系统的不稳定点, 则有2 )式、(4 )—(6 )式代入(7 )式得$W_ \mp ^{\rm{m}}\left( t \right)$ 满足$W_{\rm{ \pm }}^{\rm{s}}\left( t \right)$ 为${t_0}$ 时处在右势阱中, 令${W_ \pm }\left( t \right)$ 表示在系统(1)中粒子逃出左右势阱的逃逸速率. 当${t_0} \leqslant t < {t_0} + \tau $ 时, 在$\varepsilon \ne 0$ 及适当的时滞$\tau $ 的条件下, 可假设$\xi \left( t \right)$ 和$\varepsilon \xi \left( {t - \tau } \right)$ 是完全不相关的, 则粒子此时逃出左右势阱的速率分别为${r_ \pm } = {W_ \pm }\left( t \right)$ , 则由两态模型理论[23 ,24 ] 可得粒子逃逸速率为$p_ \pm ^{\rm{m}} = W_ \pm ^{\rm{m}}\left( t \right),\; p_ \pm ^{\rm{s}} = W_ \pm ^{\rm{s}}\left( t \right)$ , 以及$0 \leqslant t < \tau $ 以及$n = 1, 2, \cdots $ .3.驻留时间分布函数 记${p_ + }\left( t \right)$ (${p_ - }\left( t \right)$ )表示粒子处在右(左)势阱的概率, 在粒子逃逸后被吸收(也就是说忽略掉双势阱间的重复跳跃事件)的条件下, 粒子的瞬时逃逸速率方程满足:${\rho _ \pm }\left( {t\left| {{t_0}} \right.} \right)$ , 其中${\rho _ \pm }\left( {t\left| {{t_0}} \right.} \right)$ 表示粒子在${t_0}$ 时刻进入了右势阱而在t 时刻逃离右势阱的概率密度函数. 由(19 )式可得Z 为归一化常数, 满足$\displaystyle\int_0^\infty {{\rho _ \pm }\left( {t\left| {{t_0}} \right.} \right){\rm{d}}} {t_0} = 1$ .${\kern 1 pt} T = t - {t_0}$ , 则${\rho _ \pm }\left( T \right)$ 表示粒子在右(左)势阱的驻留时间分布函数. 对逃逸时间分布函数${\rho _ \pm }\left( {t\left| {{t_0}} \right.} \right)$ 取平均可得到驻留时间分布函数${\rho _ \pm }\left( T \right)$ , 即$\displaystyle\int_0^\infty \!{{\rho _ \pm }\!\left( {{t_0}} \right){\rm{d}}} {t_0} = 1$ , ${\rho _ \pm }\!\left( {{t_0}} \right)$ 为粒子在$t_0\;({t_0} \geqslant 0)$ 时刻进入了右(左)势阱的概率密度函数. 此外, Z 表示满足$\displaystyle\int_0^\infty {{\rho _ \pm }\left( T \right){\rm{d}}} T = 1$ 的归一化常数.${t_0} + n\tau \leqslant t < {t_0} + \left( {n + 1} \right)\tau, n = 0, 1, \cdots $ , (19 )式的解为22 )式代入(20 )式可得粒子逃出右势阱的逃逸时间分布函数的递归表达式为${t_0}$ 无关, 不妨取${t_0} = 0$ . 令${T_{{n}}} = t + \left( {n - 1} \right)\tau - {t_0}$ , 则$\left( {n - 1} \right)\tau \leqslant {T_{{n}}} < n\tau, n = 1, 2, \cdots $ , 通过联合(21 )式、(23 )式和(24 )式可推导出粒子在右势阱的驻留时间分布函数的递归表达式如下:Z 是归一化常数且满足$Z = 1$ .$n = 1$ 时, 有$0 \leqslant {T_1} < \tau $ , 再将初始条件${p_ + }\left( {{t_0} = 0} \right) = 1$ 和(14 )式代入(25 )式求得第一段驻留时间分布函数的解析式为$n = 2$ 时, 有$\tau \leqslant {T_2} < 2\tau $ , 然后将(14 )式、(15 )式、(17 )式和(23 )式代入(25 )式得第二段驻留时间分布函数的解析式为$n = 3$ 时, 有$2\tau \leqslant {T_3} < 3\tau $ , 根据(25 )式, 通过一系列计算可得第三段驻留时间分布函数的解析式为$n \geqslant 4$ 时驻留时间分布函数的解析表达式. 理论上讲, 根据(25 )式, 当n 取遍所有$n \geqslant 1$ 的正整数时, 便可求出粒子在右势阱的驻留时间分布函数的解析表达式. 同理, 也可求得粒子在左势阱的驻留时间分布函数的解析表达式.4.驻留时间分布函数的结构分析 由于非对称性的引入, 使得系统左右势阱差发生了改变, 且循环噪声又具有特殊的统计性质, 因此对粒子的跃迁行为会产生一定的影响. 为进一步探讨在非对称性及循环噪声影响下驻留时间分布函数的结构, 针对不同参数分别从理论和数值两方面进行分析.4.1.非对称性$\gamma $ ![]()
![]()
4.1.非对称性$\gamma $ 的影响 当参数$D = 0.1,\; \varepsilon = 0.5,\; \tau = 100$ 保持不变时, 仅考虑非对称性$\gamma $ 对驻留时间分布函数的影响, 如图1 所示: 当$\gamma = 0.07$ 时, 驻留时间分布函数呈现出分段的指数衰减现象, 且在$t = \tau $ 处呈现骤然下降趋势, 具有明显的间断现象. 当$\gamma = 0$ 时, 此时系统为对称双稳系统, 驻留时间分布函数仍呈现出分段的指数衰减现象, 且在$t = \tau $ 处间断的间距变小. 当$\gamma = - 0.07$ 时, 驻留时间分布函数指数衰减速率加快且在$t = \tau $ 处的间断性几乎消失, 呈现出单调衰减的趋势. 此外, 随着$\gamma $ 的减小, 驻留时间分布函数的衰减速率随之加快, 使得粒子在右势阱的驻留时间分布函数快速地趋于零. 也就是说, 随着$\gamma $ 的减小, 加剧了粒子的跃迁运动. 其原因在于当$\gamma = 0.07 > 0$ 时, 右势阱的势阱差较大, 而当$\gamma = - 0.07 < 0$ 时, 右势阱的势阱差较小, 如图2 所示, $\gamma = - 0.07$ 时更有利于粒子跃迁, 使得粒子在右势阱的驻留时间变短乃至为零.图 1 驻留时间分布函数随非对称性$\gamma $ 的变化(实线是从(25 )式中得到的理论结果, 圈线表示数值模拟结果, 且$D = 0.1,\; \varepsilon = 0.5,\; \tau = 100$ ) (a) $\gamma = 0.07$ ; (b) $\gamma = 0$ ; (c) γ = –0.07Figure1. Variation of residence-times distribution function (RTDF) with the asymmetry (the solid line denotes the theoretical results obtained from Eq. (25 ), and the circle line represents the numerical simulation results), where $D = 0.1, \varepsilon = 0.5, \tau = 100$ : (a) $\gamma = 0.07$ ; (b) $\gamma = 0$ ; (c) γ = –0.07图 2 $\gamma = \pm 0.07$ 势阱图 (a) $\gamma = 0.07$ ; (b) $\gamma = - 0.07$ Figure2. Potential well of $\gamma = \pm 0.07$ : (a) $\gamma = 0.07$ ; (b) γ = –0.07$t = \tau $ 时, 根据(27 )式可以得到驻留时间分布函数${\rho _ + }\left( \tau \right) = \left( {\dfrac{{p_ + ^{\rm{m}} + p_ - ^{\rm{m}}}}{2} + \dfrac{{p_ + ^{\rm{s}} + p_ - ^{\rm{s}}}}{2}} \right)\times \exp \left( { - {r_ - }\tau } \right)$ . 为进一步说明非对称性$\gamma $ 对驻留时间分布函数结构的影响, 讨论${\rho _ + }\left( \tau \right)$ 分别作为噪声强度D 、循环滞后时间$\tau $ 和相关强度$\varepsilon $ 的函数随非对称性$\gamma $ 的变化情况, 如图3 所示. 由图3(a) 可见, ${\rho _ + }\left( \tau \right)$ 随着D 的增大先增大后减小, 故有峰值出现, 说明有共振现象发生. 随着$\gamma $ 的减小, ${\rho _ + }\left( \tau \right)$ 的峰值降低且向左偏移. 图3(b) 显示, ${\rho _ + }\left( \tau \right)$ 随着$\tau $ 的增加单调衰减, 且随着$\gamma $ 的减小, 衰减速度加快. 在图3(c) 中, ${\rho _ + }\left( \tau \right)$ 随着$\varepsilon $ 的增大先缓慢衰减后衰减加速, 且随着$\gamma $ 的减小, 衰减速度加快.图 3 ${\rho _ + }\left( \tau \right)$ 分别作为噪声强度D 、循环滞后时间$\tau $ 和相关强度$\varepsilon $ 的函数随非对称性$\gamma $ 的变化($\gamma = 0.1,\; \gamma = 0.04,\; \gamma = - 0.02$ ) (a) ε = 0.2, τ = 50; (b) D = 0.1, ε = 0.2; (c) D = 0.1, τ = 50Figure3. Variation of ${\rho _ + }\left( \tau \right)$ which is a function of noise intensity D , relative strength $\varepsilon $ and recycling lag $\tau $ respectively with the asymmetry $\gamma $ ($\gamma \!= \! 0.1,\; \gamma = 0.04,\; \gamma \! = \! - 0.02$ ): (a) $\varepsilon = 0.2, \; \tau = 50$ ; (b) $D = 0.1, \; \varepsilon = 0.2$ ; (c) D = 0.1, τ = 504.2.相关强度$\varepsilon $ ![]()
![]()
-->4.2.相关强度$\varepsilon $ 的影响 固定参数$D = 0.1,\; \gamma = 0.1,\; \tau = 150$ , 考虑相关强度$\varepsilon $ 对驻留时间分布函数结构的影响, 如图4 所示: 当$\varepsilon $ 适当改变时, 驻留时间分布函数呈现出指数衰减现象, 且在$t = \tau $ 处出现间断; 随着$\varepsilon $ 的增大, 驻留时间分布函数指数衰减的速率加快且在$t = \tau $ 处间断的间距变小, 这说明了噪声循环项对粒子在双势阱的跃迁起到促进作用.图 4 驻留时间分布函数随相关强度$\varepsilon $ 的变化(实线是从(25 )式中得到的理论结果, 圈线表示数值模拟结果, 且$D = 0.1,\; \gamma = 0.1,\; \tau = 150$ ) (a) $\varepsilon = 0.2$ ; (b) $\varepsilon = 0.5$ ; (c) $\varepsilon = 0.7$ Figure4. Variation of the RTDF with the relative strength ε (the solid line denotes the theoretical results obtained from Eq. (25 ), and the circle represents the numerical simulation results), where $D = 0.1,\; \gamma = 0.1,\; \tau = 150$ : (a) $\varepsilon = 0.2$ ; (b) $\varepsilon = 0.5$ ; (c) $\varepsilon = 0.7$ .4.3.循环滞后时间$\tau $ ![]()
![]()
-->4.3.循环滞后时间$\tau $ 的影响 当$D = 0.09,\; \gamma = 0.08,\; \varepsilon = 0.5$ 保持不变时, 仅改变循环滞后时间$\tau $ 的值, 驻留时间分布函数呈现出分段指数衰减的现象, 且$t = \tau $ 时出现间断, 如图5 所示. 此外, 随着$\tau $ 的增加, 驻留时间分布函数在$t = \tau $ 处的间断变得不太明显, 甚至消失, 这说明了对于较大的$\tau $ ($\tau \gg {1 / {{r_ - }}}$ ), 在循环噪声的驱动下非对称双稳系统将会进入似稳状态, 此时, 驻留时间分布函数满足${\rho _ + }\left( t \right) \propto \exp \left( { - {r_ - }t} \right)$ .图 5 驻留时间分布函数随循环滞后时间$\tau $ 的变化(实线是从(25 )式中得到的理论结果, 圈线表示数值模拟结果, 且 $D \!= \!0.09,\; \gamma \!= \! 0.08,\; \varepsilon = 0.5$ ) (a) $\tau \!=\! 150$ ; (b) $\tau \!=\! 200$ ; (c) $\tau = 300$ Figure5. Variation of the RTDF with the recycling lag $\tau $ (the solid line denotes the theoretical results obtained from Eq. (25 ), and the circle represents the numerical simulation results), where $D = 0.09, \;\gamma = 0.08,\; \varepsilon = 0.5$ : (a) $\tau = 150$ ; (b) $\tau = 200$ ; (c) $\tau = 300$ .$t = \tau $ 处的值${\rho _ + }\left( \tau \right)$ 进行具体分析. 如图6 所示, 随着噪声强度D 和相关强度$\varepsilon $ 的改变, ${\rho _ + }\left( \tau \right)$ 出现了极大值, 这说明了在循环噪声的作用下非对称双稳系统发生了随机共振现象.图 6 $ {\rho _ + }\left( \tau \right)$ 随D 和$ \varepsilon $ 的变化, 其中$ \gamma = 0.05, \;\tau = 150$ , $ 0.1 \leqslant \varepsilon \leqslant 1$ , $ 0.03 \leqslant D \leqslant 0.3$ Figure6. Variation of ${\rho _ + }\left( \tau \right)$ with D and $\varepsilon $ , where $\gamma = 0.05, \tau = 150$ , $0.1 \leqslant \varepsilon \leqslant 1$ , $0.03 \leqslant D \leqslant 0.3$ .5.结 论 本文主要研究了循环噪声驱动下非对称双稳系统驻留时间分布函数的计算方法, 数值模拟结果验证了该方法的可行性. 利用具有分段逃逸速率的两态模型理论, 推导出了驻留时间分布函数的分段解析式. 基于此, 分别从理论和数值模拟的角度分析了不同参数对驻留时间分布函数结构产生的影响, 着重说明了在非对称性$\gamma $ 的影响下驻留时间分布函数产生的反馈结构: 当$\gamma > 0$ 且取适当值时, 驻留时间分布函数呈现出分段指数衰减现象, 且当$t = \tau $ 时, 表现出明显的间断现象; 当$\gamma < 0$ 时, 驻留时间分布函数在$t = \tau $ 处的间断性几乎消失且指数衰减速率加快, 呈现出单调衰减现象. 以驻留时间分布函数在$t = \tau $ 处的值进行具体分析, 进一步说明随着非对称性的减小, 驻留时间分布函数的衰减速度加快. 此外, 驻留时间分布函数在$t = \tau $ 处的值随着噪声强度和相关强度的改变出现极大值, 说明在非对称双稳系统中, 循环噪声能够诱导随机共振现象的发生. 本文研究方法考虑了系统的非对称性, 更具有实用价值, 该方法可用于计算循环噪声驱动下时滞非对称双稳系统的驻留时间分布函数. 









































































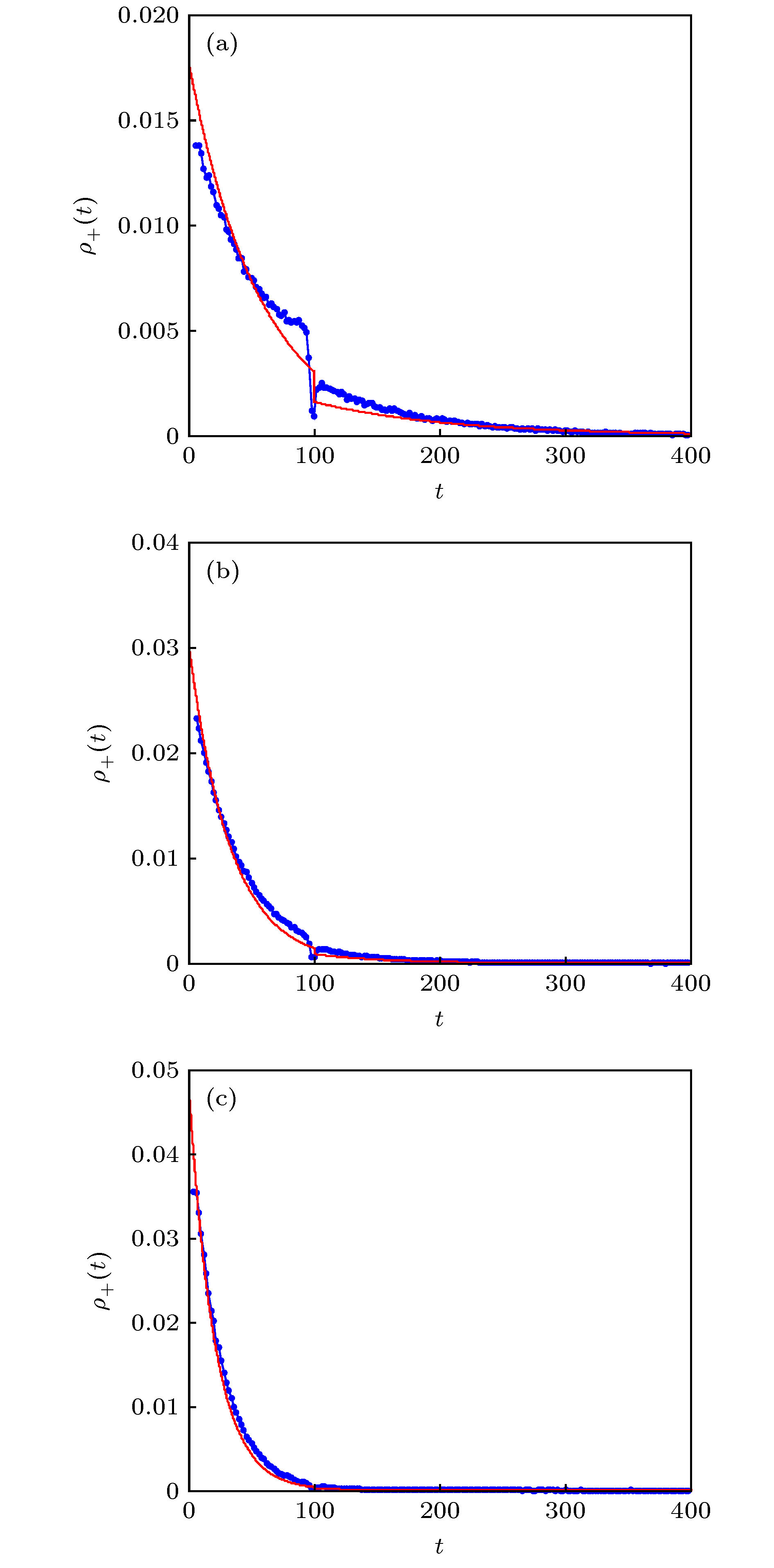 图 1 驻留时间分布函数随非对称性
图 1 驻留时间分布函数随非对称性






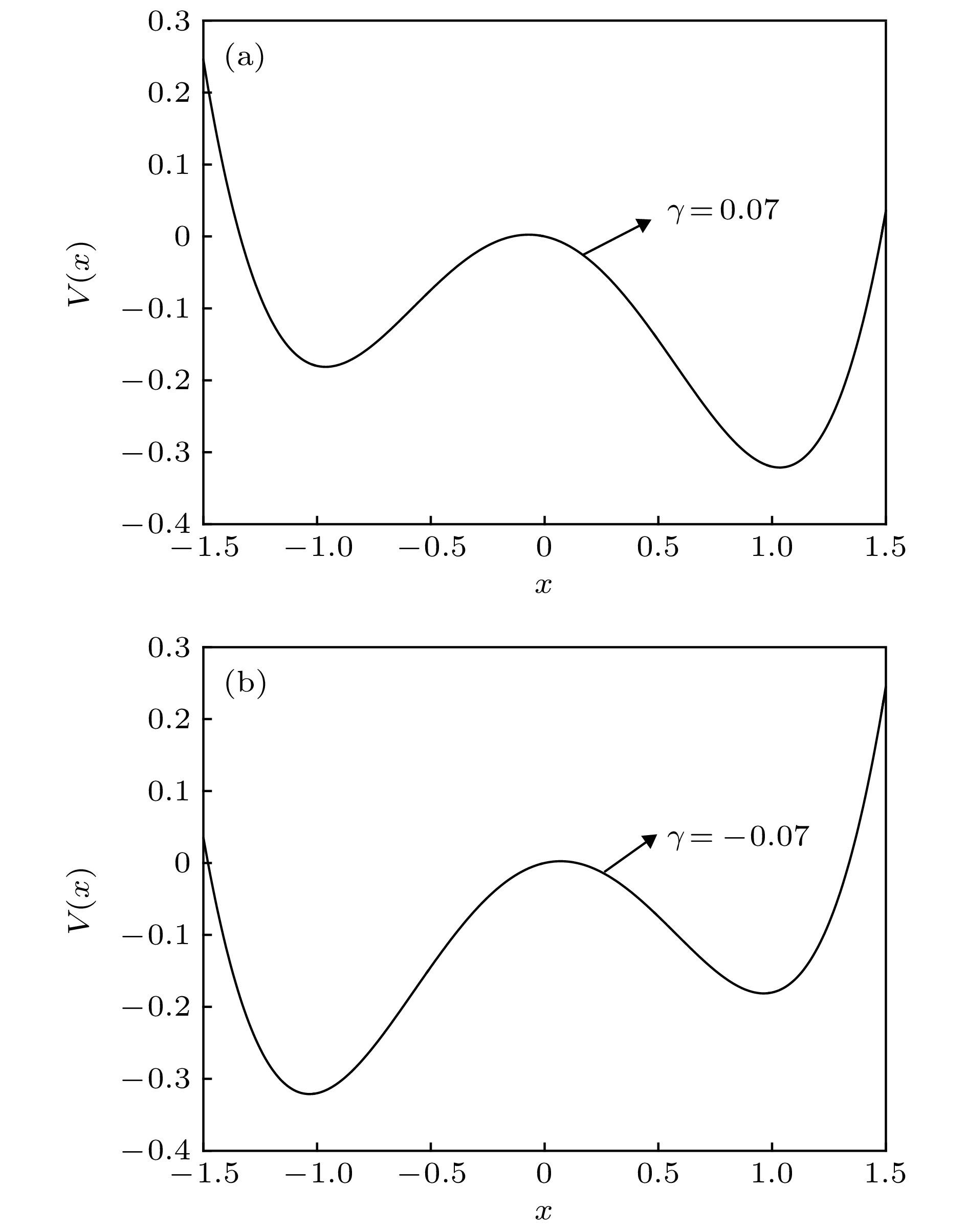 图 2
图 2 




















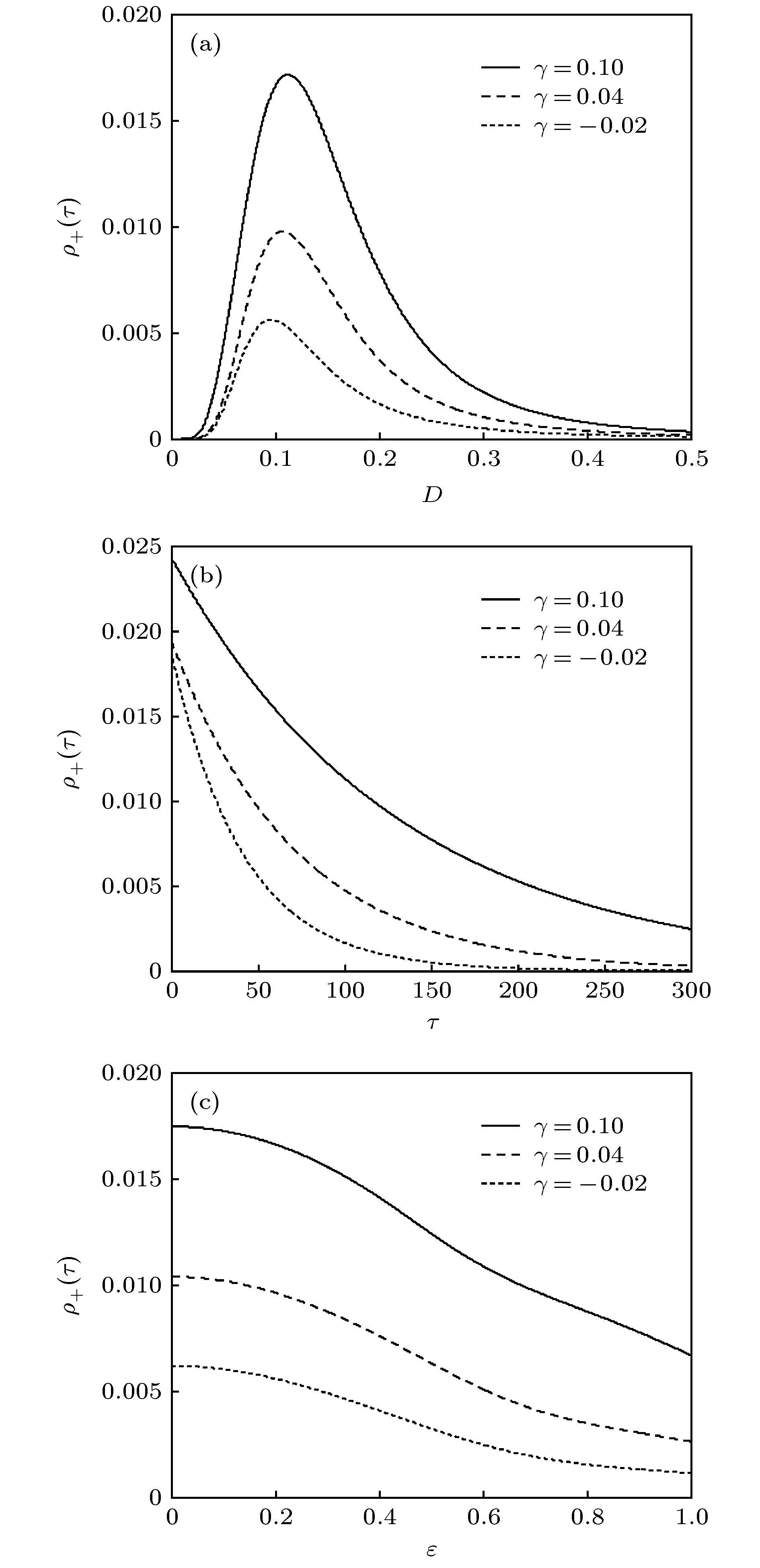 图 3
图 3 


















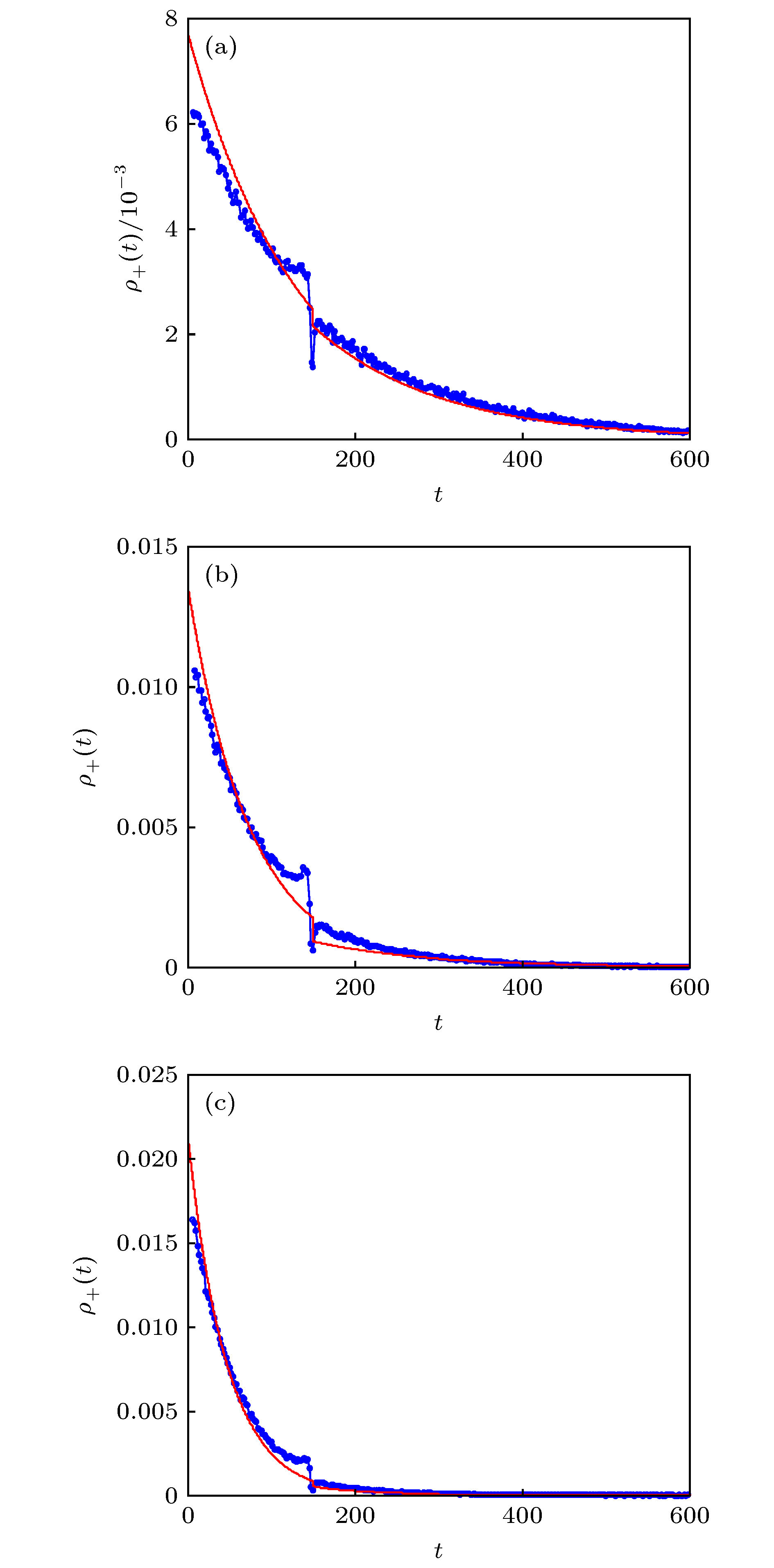 图 4 驻留时间分布函数随相关强度
图 4 驻留时间分布函数随相关强度

















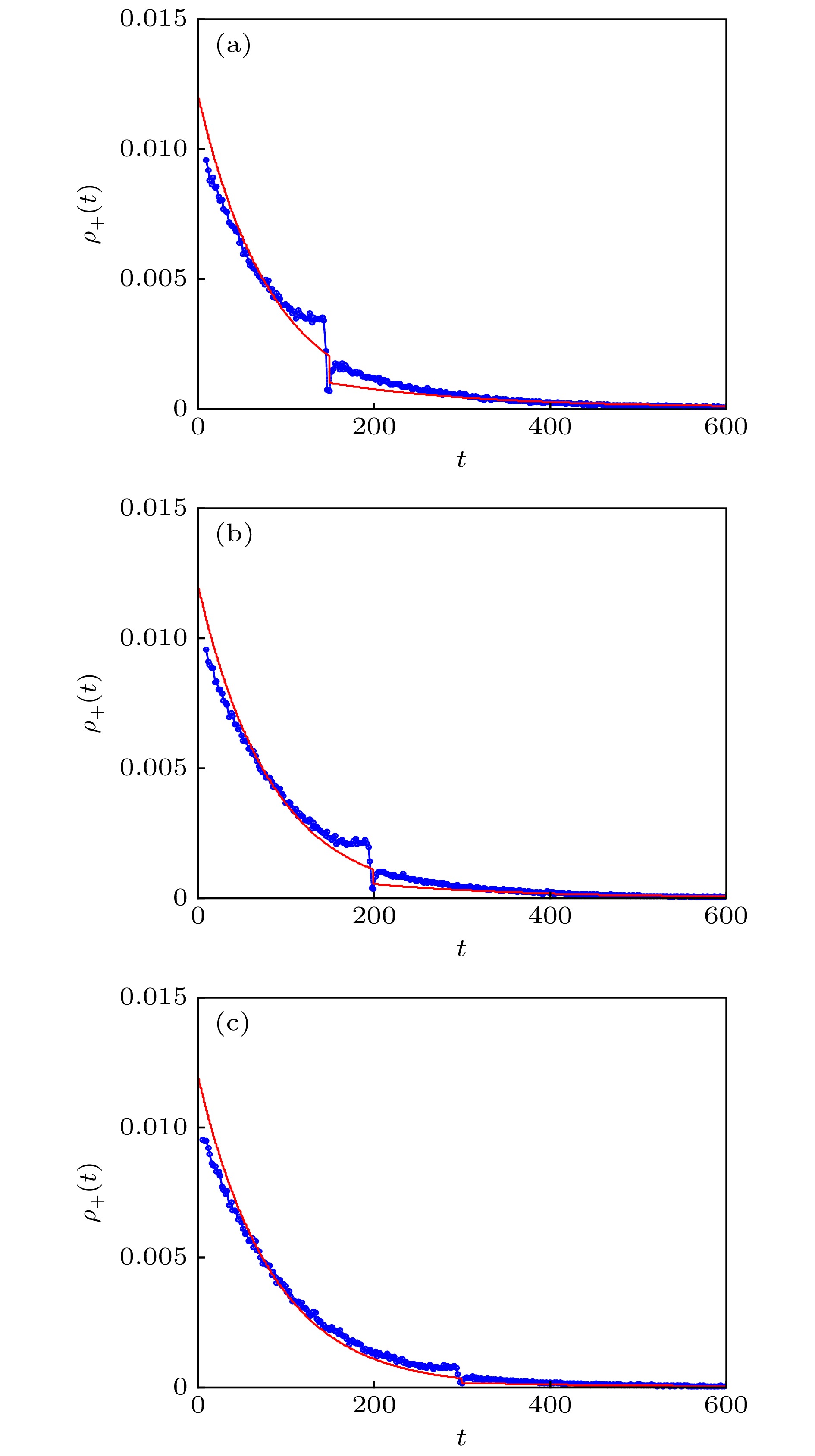 图 5 驻留时间分布函数随循环滞后时间
图 5 驻留时间分布函数随循环滞后时间













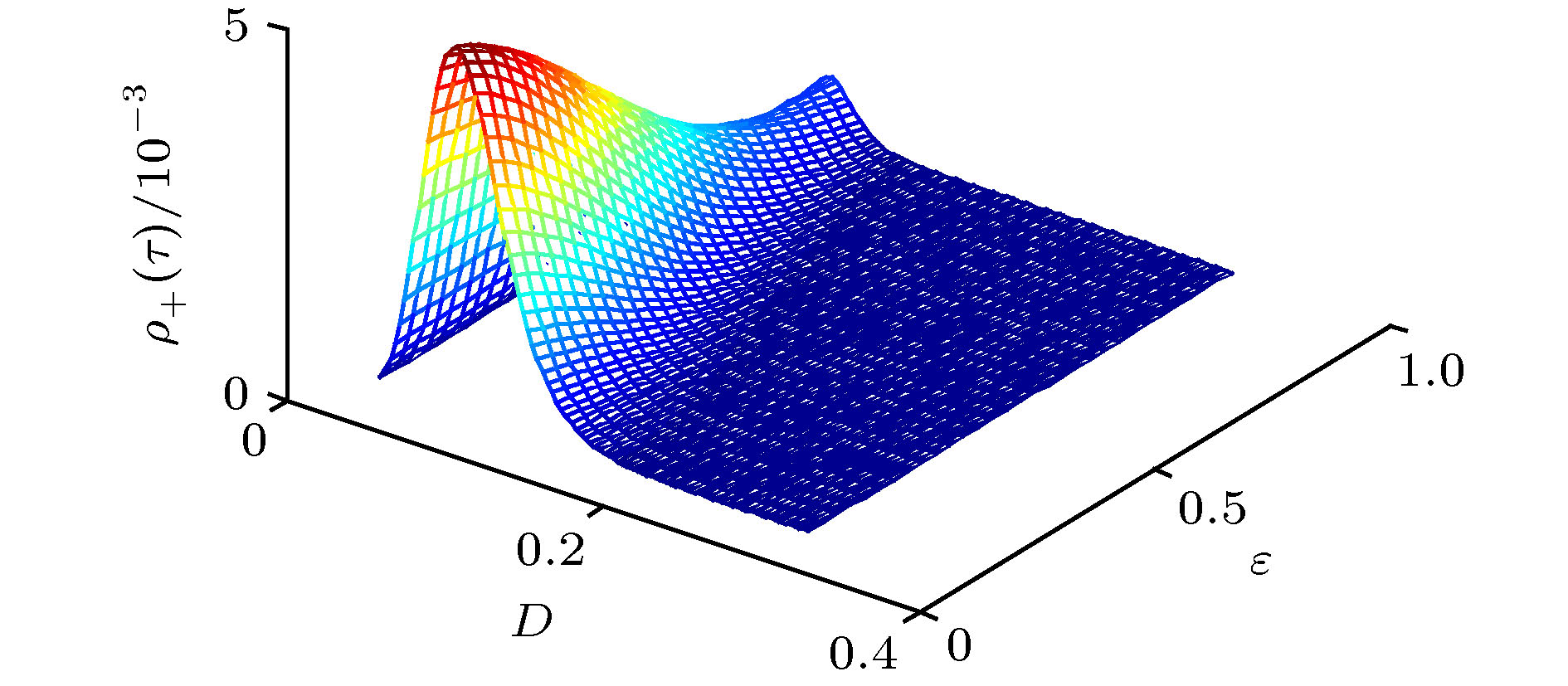 图 6
图 6 
















