1.Key Laboratory for Quantum Optics, Shanghai Institute of Optics and Fine Mechanics, Chinese Academy of Sciences, Shanghai 201800, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Abstract:We propose a scheme to create a ring magnetic guide based on Archimedean spirals. This scheme is significant to obtaining large circle area for atom interference and the realization of guided atom-interferometer gyroscopes. Then the scheme can be used to realize an inertial sensing system which is independent of the GPS system.The wires structure with $ {\text{π}}/3$ rotational symmetry is composed of three wires. Each wire is centrosymmetric and consists of a pair of Archimedean spirals connected by two arcs. Consequently, the leading wire ends of the layout can be arranged separately in the different place of the layout plane. If the leading wire ends are put together somewhere, the closed ring guide cannot form and a gap appears in the guide due to the concentrated distribution of the leading wire ends. Since the leading wire ends distribute in the different location with $ {\text{π}}/3$ rotational symmetry in our scheme, when direct currents are applied, the closed ring trap can be generated ingeniously.We calculate and analyze the magnetic field distribution generated by our structure after loading currents in the cylindrical coordinates system. To get higher sensitivity compared to GPS and make the ring trap locate in a proper height above the chip surface, we set the initial radius of Archimedean spirals $ a=5\ {\rm{mm}}$ and the distance between neighboring spirals $ d=0.1\ {\rm{mm}}$. When three wires carry direct currents in an opposite current-phase-difference between the adjacent wires, a closed ring magnetic guide indeed appears but with six zero magnetic field points along the guide center. Because of the variation of the current density along r direction in Archimedean spirals, the magnetic field of the guide center is not zero at most angle. However, the variation cannot avoid the existence of zero points and the distribution of the zero points is determined by the rotational symmetry of the wires structure.Since atoms near the zero points of the magnetic field would be lost from the trap, the zero points must be removed from the center of the ring guide. Based on the time-orbiting-potential principle (TOP), we add an ac current modulation on the direct currents above to eliminate the influence of the zero points of the guide center. We give the ac current expressions and discuss the effects of currents parameters on the ring guide. The current phase reflects how the currents change in three wires. The modulation depth determines the effect of the modulation: if the modulation depth is too high, the trap may disappear; if the modulation depth is too low, the effect is minimal. The modulation frequency reflects the change rate of the modulation magnetic field.To ensure the smoothness of the guide along angular direction and adiabatic following of the magnetic field, we set the modulation depth $ I_j/I_i=0.1$, the current-phase $ \phi=2{\text{π}}/3$ and the modulation frequency $ \omega_b=2{\text{π}}\times10\ {\rm{kHz}}$. The numerical calculation results indicate that ac current modulation can change the magnetic field intensity of the guide center and smooth the variance of the magnetic field intensity of the guide along angular direction. We take the cross section of the guide with $ \theta={\text{π}}/2$, for example. The minimum of the instantaneous magnetic field rotates and our structure has formed a TOP trap in both the r and z directions. In angular direction, the magnetic field intensity of the guide center changes near $ 0.25\ {\rm{mT}}$. The difference between the maximum and the minimum is $ \Delta\,B\approx0.007\ {\rm{mT}}$ which is small enough compared to applying direct current only.Therefore, based on the Archimedean spirals and ac current modulation, we obtain an enclosed and smooth ring magnetic guide without zero magnetic fields along the guide center for neutral atoms. The location of the guide center also changes along the angle direction. The amplitudes of variation along r and z directions are $ \Delta r=0.015\ {\rm{mm}}$, $ \Delta z=0.005\ {\rm{mm}}$, which are $ \Delta r/l\approx0.3\,\%$, $ \Delta z/l\approx0.1\,\%$ compared with $ l\approx2{\text{π}} a/6\approx5.236\ {\rm{mm}}$.Compared to other schemes, our structure can be etched on an atom chip and is easily to apply modulation currents, which is simple and stable to form a ring magnetic guide. This scheme can be used to realize a compact, low power and stable inertial sensor based on atom-chip gyroscope device. Keywords:ring magnetic guide/ Archimedean spirals/ atom chip/ AC modulation
2.三线阿基米德螺线结构理想的环形磁导引可以基于理想同心三环线或四环线结构[27], 通过对导线加载相应的交流调制[28], 可以产生闭合光滑的且势阱中心无零点的环形势阱, 如图1所示. 图1(a)是理想的三环线布线结构, 图1(b)是相应的磁势阱. 图 1 (a)理想三环线结构, 其中箭头表示电流方向; (b)理想环形磁导引的磁场分布示意图, 图中的蓝色圆环部分为环形磁导引 Figure1. (a) The ideal structure of the three concentric ring wires. The arrows represent the direction of currents; (b) The magnetic field intensity distribution of the ideal ring magnetic guide. The blue circle marks the ring magnetic guide.
其中a为阿基米德螺线的起始半径, b为螺线半径相对于角度的变化率, 即$ {\rm d}r/{\rm d}\theta $. 采用阿基米德螺线结构可以避免引线端集中分布导致的缺口问题. 当按照特定的方式排列, 阿基米德螺线可以形成类似三环线的结构, 产生环形势阱[21,22]. 我们设计的三线阿基米德螺线结构如图2所示. 该结构主要包括三根相同的具有中心对称性构型的导线, 每根导线包含一对由圆弧连接的阿基米德螺线和两条直导线引线端, 每根导线间隔$ {\text{π}}/3 $的旋转角度交错排列在一起, 使得相邻两根阿基米德螺线的间隔相同, 且使整个结构具有以$ {\text{π}}/3 $为周期的旋转对称性. 于是, 这便巧妙地构成了六段首尾相接的三导线布局, 当加载电流后该结构便能够形成约束中性原子的环形磁势阱. 图 2 三线阿基米德螺线环形磁导引的布线结构, 其中黑色实线、红色点划线和蓝色虚线分别表示三根不同的导线, 每根导线的引线端分别用1, 2, 3表示, 箭头表示电流方向, 阿基米德螺线起始半径$a=5\ {\rm{mm}}$, 相邻螺线的间距d = 0.1 mm Figure2. Archimedean-spiral-based three wires structure of the ring waveguide. The black solid line, the red chain-dotted line and the blue dashed line denote three different wires respectively. The input and output ports of each wire are marked by 1, 2, 3 and the arrows represent the direction of currents. The initial radius of Archimedean spirals is $a=5\ {\rm{mm}}$ and the distance between neighboring spirals is $d=0.1\ {\rm{mm}}$.
其中$ I_{\rm i} $和$ I_{\rm j} $分别为所加载电流的直流成分和交流调制的幅度, $ \omega_{\rm b} $为调制频率, $ \phi $为不同导线加载的交变电流的相位差. 随着角度$ \theta $的变化, 三线阿基米德螺线结构的三根导线的相对位置不断变化, 为保证三根导线的电流相位差在一个环路内的变化相同, 我们设定电流相位差$ \phi = 2{\text{π}}/3 $. 我们发现, TOP方法不但能够移除导引中心的磁场零点, 而且也可以平滑在直流情况下环形势阱极小值在角度方向上的起伏. 这就是说, 在电流值给定的情况下, 尽管环形势阱中心是磁场强度的极小值, 但在不同的角度方向上该磁场极小值并不同. 因此, 在角度方向上导引中心的磁场强度存在极大值和极小值, 两者的差值即磁场强度起伏$ \Delta B $, 可以用来表征导引中心沿角度方向的平滑度. 物理分析和数值计算表明, 在布线结构确定的情况下, 平滑程度$ \Delta B $主要由调制深度$ I_{\rm j}/I_{\rm i} $决定, 如图3所示. 图 3 当调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {{\rm{kHz}}}$, 电流位相$\phi=2{\text{π}}/3$, 电流直流成分$I_{\rm i}=1\ {\rm{A}}$时, 导引中心的角向磁场起伏$\Delta\, B$与调制深度$I_{\rm j}/I_{\rm i}$的关系. 当$I_{\rm j}/I_{\rm i}=0.1$时, 环形磁导引中心磁场强度的起伏最小: $\Delta\, B\approx0.007\ {\rm{mT}}$ Figure3. The relation of the angular magnetic field intensity $\Delta\, B$ of the guide center with the modulation depth $I_{\rm j}/I_{\rm i}$ when the modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {{\rm{kHz}}}$, the current phase is $\phi=2{\text{π}}/3$ and the DC part of the currents is $I_{\rm i}=1\ {\rm{A}}$. When the modulation depth is $I_{\rm j}/I_{\rm i}=0.1$, the variation of the angular magnetic field intensity is the minimum: $\Delta\, B\approx0.007\ {\rm{mT}}$.
4.计算结果在上述参数的条件下, 以三线阿基米德螺线结构中心为原点, 采用柱坐标系$ (r, \theta, z) $, 对加载交流调制的三线阿基米德螺线结构产生的磁势阱进行计算和分析. 首先研究方位角固定时导引横截面的势阱情况. 不失一般性, 选定方位角度$ \theta = {\text{π}}/2 $. 图4是形成TOP阱的示意图. 加载交流调制使得导引中心的极小值(对有些方位角即为磁场零点)沿虚线轨迹旋转, 旋转轨迹在水平和竖直方向上的变化幅度分别为$ 0.02\ {} $和$ 0.03\ {\rm{mm}} $. 图 4 三线阿基米德螺线结构产生的环形磁导引在$\theta={\text{π}}/2$截面上的磁场分布. 调制电流的直流成分$I_{\rm i}=1\ {\rm{A}}$, 交流成分$I_{\rm j}=0.1\ {\rm{A}}$, 调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$, 电流相位差$\phi=2{\text{π}}/3$. 加载交流调制后, 磁场的瞬时极小值(磁场零点)沿红色虚线旋转, 旋转轨迹在水平和竖直方向上的变化幅度分别为$0.02\ {}$和$0.03\ {\rm{mm}}$ Figure4. The distribution of the magnetic field intensity in the $\theta={\text{π}}/2$ cross section of the ring magnetic guide generated by the Archimedean-spiral-based three wires structure. The DC part and the AC part of the modulation currents are $I_{\rm i}=1\ {\rm{A}}$ and $I_{\rm j}=0.1\ {\rm{A}}$, respectively. The modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$. The current phase is $\phi=2{\text{π}}/3$. After loading AC modulation, the minimum (zero point) of the magnetic field rotates along the red dashed line. The variation amplitude of the path along r and z direction are respectively $0.02\ $ and $0.03\ {\rm{mm}}$.
图5给出交流调制对导引横截面磁场强度的影响. 可以看到, 加载交流调制后, 导引中心附近的磁场强度的时间平均值的改变非常明显. 在上述参数条件下, 导引中心的磁场强度由$ 0.12\ {\rm{mT}} $变为$ 0.26\ {\rm{mT}} $. 在导引的横截面上磁势阱在加载交流调制后从尖锐变得平缓, 即在r方向和z方向上实现了TOP阱约束. 对于$ \left|F = 2, m_F = 2\right\rangle $的$ ^{87}{\rm {Rb}} $原子, 导引在r方向和z方向上的阱深分别约为$ \Delta U_r = $ 739 μK和$ \Delta U_z = 195\ {\text{μ}}{\rm{K}} $, 磁阱频率的最大值分别约为$ \omega_{{\rm t}r} = 2{\text{π}}\times36.8\ {\rm{Hz}} $和$ \omega_{{\rm t}z} = 2{\text{π}}\times29.3\ {\rm{Hz}} $. 图 5 (a) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在$\theta={\text{π}}/2$截面上磁场在r方向上的分布; (b) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在$\theta={\text{π}}/2$截面上磁场在z方向上的分布. 加载电流的直流成分$I_{\rm i}=1\ {\rm{A}}$, 交流成分$I_{\rm j}=0.1\ {\rm{A}}$, 调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$, 电流相位差$\phi=2{\text{π}}/3$. 加载交流调制后, 截面上的磁场最小值由$0.12\ {\rm{mT}}$变为$0.26\ {\rm{mT}}$ Figure5. (a) The magnetic field distribution in the cross section with $\theta={\text{π}}/2$ of the ring magnetic guide along r direction before (black solid line) and after (red dashed line) loading AC modulation; (b) The magnetic field distribution in the cross section with $\theta={\text{π}}/2$ of the ring magnetic guide along z direction before (black solid line) and after (red dashed line) loading AC modulation. The DC part and the AC part of the AC modulation currents are $I_{\rm i}=1\ {\rm{A}}$ and $I_{\rm j}=0.1\ {\rm{A}}$, respectively. The modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$. The current phase is $\phi=2{\text{π}}/3$. After loading AC modulation, the minimum of the magnetic field intensity in the cross section changes from $0.12\ {\rm{mT}}$ to $0.26\ {\rm{mT}}$.
现在讨论环形导引在交流调制下势阱在角向的改变情况. 图6为导引中心磁场强度在加载调制与否时的对比图. 在未加载交流调制而仅仅加载直流电的情况下, 随着角度$ \theta $的变化, 导引中心的磁场强度存在较大的起伏, 其变化范围大约为$ 0.025— $ 0.120 mT, 极大值和极小值之差为$ 0.095\ {\rm{mT}} $. 当加上上述交流调制后, 随着角度$ \theta $的变化, 导引中心的磁场强度起伏明显变小, 导引中心的磁场强度$ B\approx0.25\ {\rm{mT}} $, 极大值和极小值之差$ \Delta B\approx $ 0.007 mT, 磁场起伏的相对变化约为$ \Delta B/B = $ 2.88%. 可见交流调制改变了环形磁导引的导引中心磁场强度, 从而在本质上移除了导引中心存在磁场零点的可能性; 同时有效地抑制了环形磁导引的角向磁场起伏, 使得导引更光滑. 图 6 在三线阿基米德螺线上单独加载直流电流时的环形磁导引(虚线)和加载交流调制(实线)后导引中心的磁场强度随着角度$\theta$的变化. 图中虚线情形: 三根导线上加载的直流电流分别为$I_1=1\ {\rm{A}}$, $I_2=-1\ {\rm{A}}$, $I_3=1\ {\rm{A}}$, 导引中心的磁场强度的变化范围约为$0.025\, —\, 0.120\ {\rm{mT}}$, 最大值和最小值之差为$0.095\ {\rm{mT}}$. 图中实线情形: 三根导线上加载电流的直流成分$I_{\rm i}=1\ {\rm{A}}$, 交流成分$I_{\rm j}=0.1\ {\rm{A}}$, 调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$, 电流相位差$\phi=2{\text{π}}/3$, 导引中心的磁场强度$B\approx0.25\ {\rm{mT}}$, 磁场起伏$\Delta\, B\approx0.007\ {\rm{mT}}$ Figure6. The magnetic field intensity of the guide center versus azimuthal angle $\theta$ for loading DC currents only (dashed line) and loading AC modulation (solid line), respectively. The dashed line: The DC currents applied to the three wires respectively are $I_1=1\ {\rm{A}}$, $I_2=-1\ {\rm{A}}$, $I_3=1\ {\rm{A}}$. The variation of the magnetic field is about $0.025\, —\, 0.120\ {\rm{mT}}$. The difference between the maximum and the minimum is $0.095\ {\rm{mT}}$. The solid line: The DC part and the AC part of the AC modulation currents applied to the three wires are $I_{\rm i}=1\ {\rm{A}}$ and $I_{\rm j}=0.1\ {\rm{A}}$, respectively. The modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$. The current phase is $\phi=2{\text{π}}/3$. The magnetic field intensity of the guide center is about $B\approx0.25\ {\rm{mT}}$. The variation of the magnetic field is $\Delta\, B\approx0.007\ {\rm{mT}}$.
为了完整起见, 图7给出导引中心位置的空间起伏. 物理上空间起伏是由三线阿基米德螺线的布线结构决定, 与交流调制无关. 数值计算也证明了这一点. 由图7可知, 角度$ \theta $每变化$ {\text{π}}/3 $, 导引中心的位置在$ r = 5.15\ {\rm{mm}} $, $ z = 0.12\ {\rm{mm}} $附近变化, 变化幅度约为$ \Delta r = 0.015\ {\rm{mm}} $, $ \Delta z = 0.005\ {\rm{mm}} $, 相对于导引长度$ l\approx2{\text{π}} a/6\approx5.236\ {\rm{mm}} $的变化约为$ \Delta r/l = 0.3\% $, $ \Delta z/l = 0.1\% $. 图 7 对三线阿基米德螺线加载交流调制. 加载调制电流的直流成分$I_{\rm i}=1\ {\rm{A}}$, 交流成分$I_{\rm j}=0.1\ {\rm{A}}$, 调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$, 电流相位差$\phi=2{\text{π}}/3$. (a) (b)分别为加载交流调制后导引中心空间位置在半径r方向和竖直z方向上的起伏变化, 起伏变化的幅度分别为$\Delta r=0.015\ {\rm{mm}}$和$\Delta z=0.005\ {\rm{mm}}$ Figure7. Applying AC modulation to the three-wires Archimedean spirals structure. The DC part and the AC part of the AC modulation currents are $I_{\rm i}=1\ {\rm{A}}$ and $I_{\rm j}=0.1\ {\rm{A}}$, respectively. The modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$. The current phase is $\phi=2{\text{π}}/3$. (a) and (b) are respectively the spatial position in r direction and z direction of the ring magnetic guide after loading AC modulation. The amplitudes of variation along r direction and z direction are $\Delta r=0.015\ {\rm{mm}}$ and $\Delta z=0.005\ {\rm{mm}}$, respectively.
图8是加载交流调制后的三线阿基米德螺线环形磁导引在高度$ z = 115\ {\text{μ}}{\rm{m}} $处的磁场分布. 由三线阿基米德螺线结构形成的环形势阱即为图8中蓝色圆环部分, 其中心强度约为$ 0.25\ {\rm{mT}} $. 可以看出此三线阿基米德螺线环形磁导引是闭合光滑且中心无零点的环形导引, 可以导引处于$|F = 2, $$\left. m_F = 2\right\rangle $态的$ ^{87}{\rm {Rb}} $原子. 图 8 加载交流调制后的三线阿基米德螺线环形磁导引在高度$z=115\ {\text{μ}}{\rm{m}}$处的磁场分布. 图中的蓝色圆环部分为环形磁导引, 导引中心的磁场强度约为$0.25\ {\rm{mT}}$. 加载电流的直流成分$I_{\rm i}=1\ {\rm{A}}$, 交流成分$I_{\rm j}=0.1\ {\rm{A}}$, 调制频率$\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$, 电流相位差$\phi=2{\text{π}}/3$ Figure8. The magnetic field intensity distribution of the three-wires Archimedean spirals structure of the ring magnetic guide at $z=115\ {\text{μ}}{\rm{m}}$ when both DC and AC modulation are loaded. The blue circle marks the ring magnetic guide and the magnetic field intensity of the guide center is about $0.25\ {\rm{mT}}$. The DC part and the AC part of the currents are $I_{\rm i}=1\ {\rm{A}}$ and $I_{\rm j}=0.1\ {\rm{A}}$, respectively. The modulation frequency is $\omega_{\rm b}=2{\text{π}}\times10\ {\rm{kHz}}$. The current phase is $\phi=2{\text{π}}/3$.





















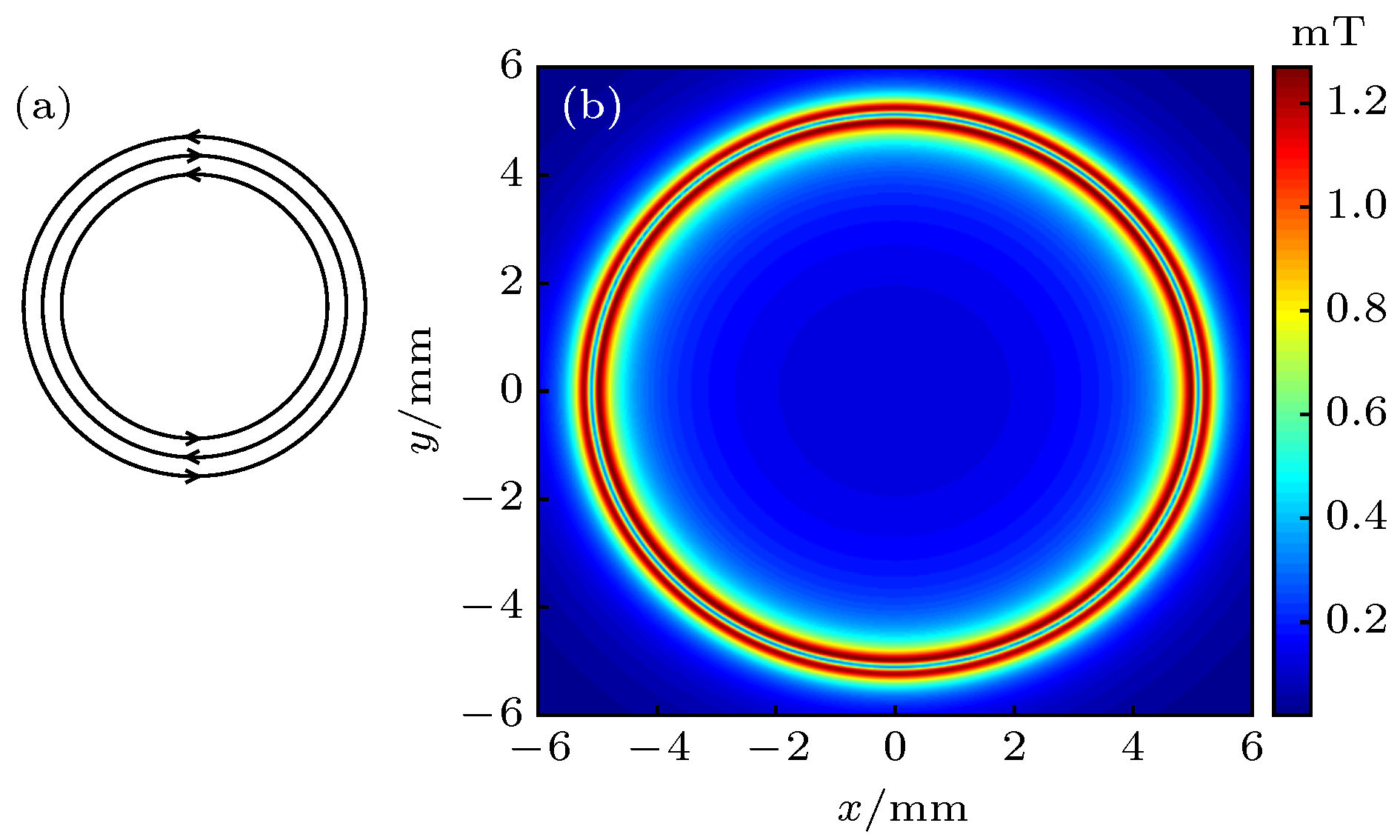 图 1 (a)理想三环线结构, 其中箭头表示电流方向; (b)理想环形磁导引的磁场分布示意图, 图中的蓝色圆环部分为环形磁导引
图 1 (a)理想三环线结构, 其中箭头表示电流方向; (b)理想环形磁导引的磁场分布示意图, 图中的蓝色圆环部分为环形磁导引



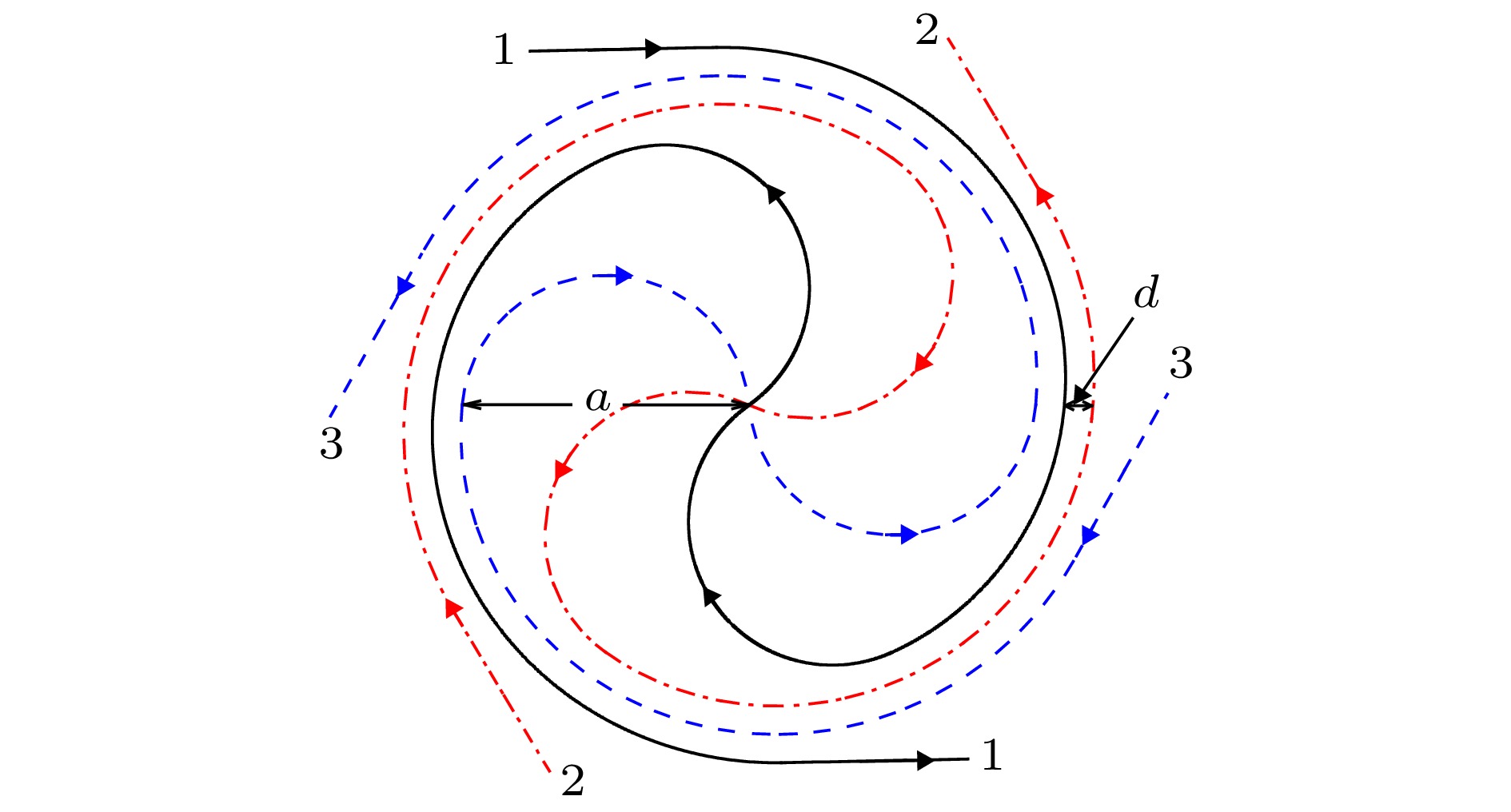 图 2 三线阿基米德螺线环形磁导引的布线结构, 其中黑色实线、红色点划线和蓝色虚线分别表示三根不同的导线, 每根导线的引线端分别用1, 2, 3表示, 箭头表示电流方向, 阿基米德螺线起始半径
图 2 三线阿基米德螺线环形磁导引的布线结构, 其中黑色实线、红色点划线和蓝色虚线分别表示三根不同的导线, 每根导线的引线端分别用1, 2, 3表示, 箭头表示电流方向, 阿基米德螺线起始半径




















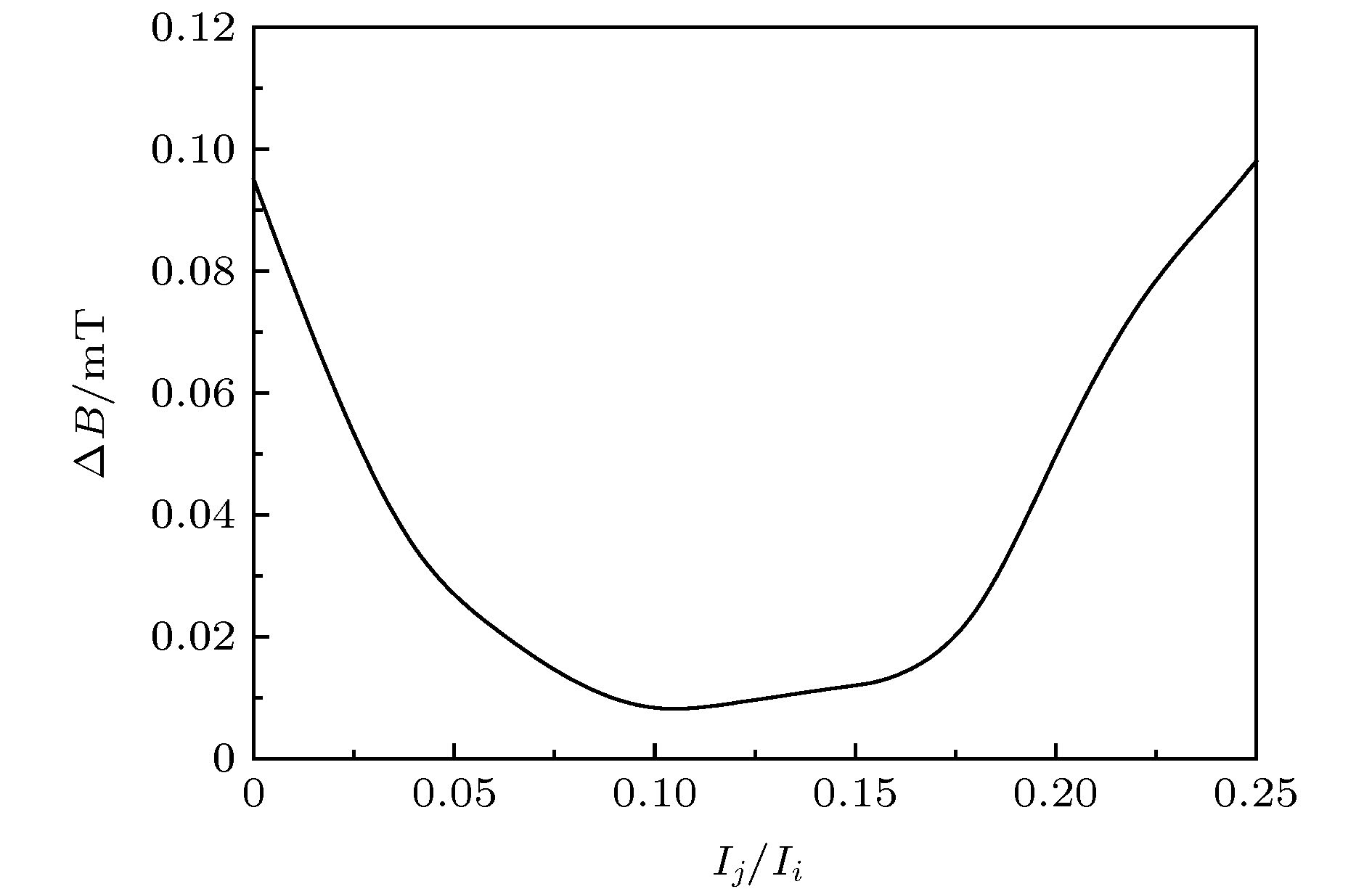 图 3 当调制频率
图 3 当调制频率



















































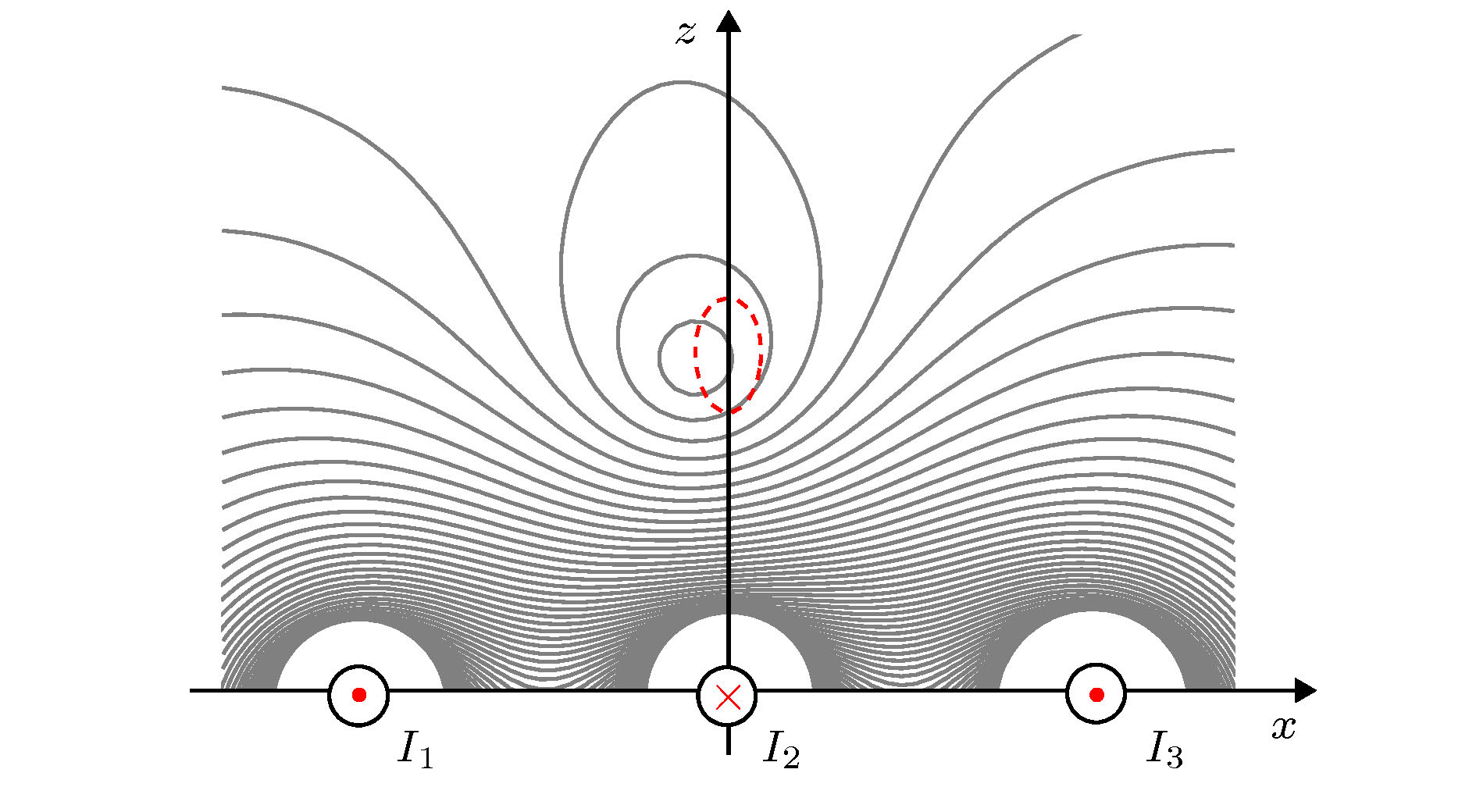 图 4 三线阿基米德螺线结构产生的环形磁导引在
图 4 三线阿基米德螺线结构产生的环形磁导引在





















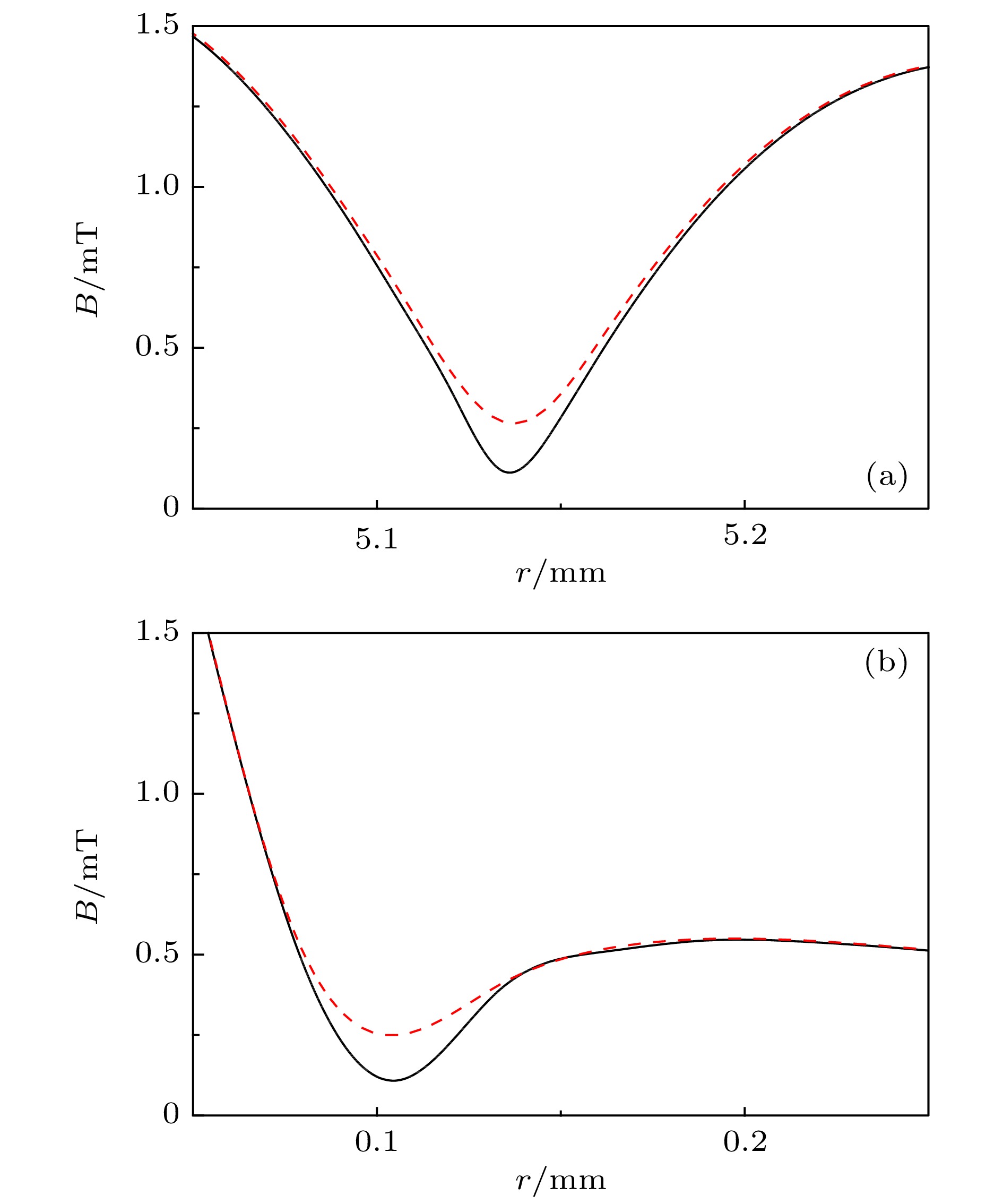 图 5 (a) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在
图 5 (a) 环形磁导引加载交流调制前(黑色实线)和加载交流调制后(红色虚线)在






















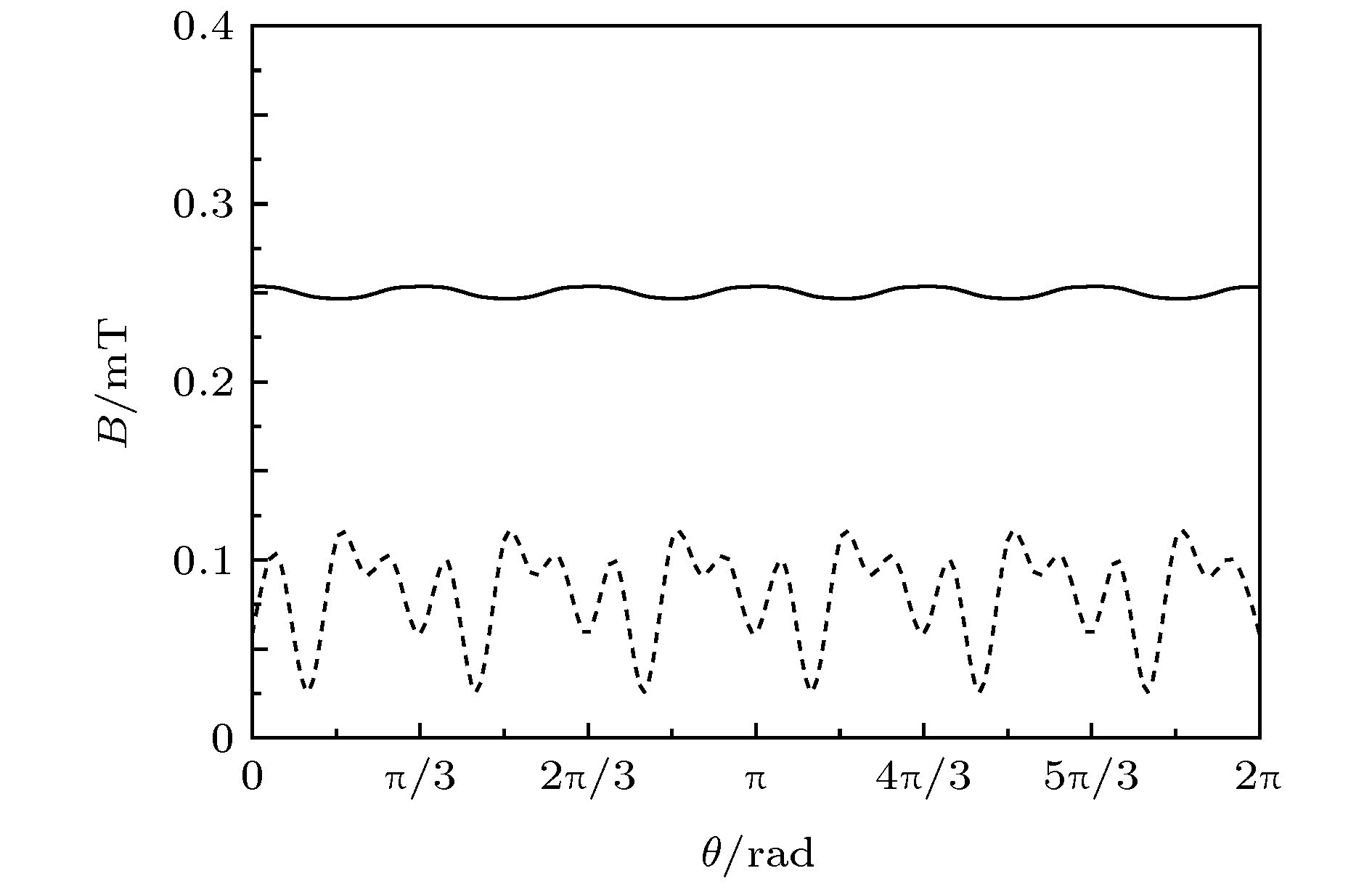 图 6 在三线阿基米德螺线上单独加载直流电流时的环形磁导引(虚线)和加载交流调制(实线)后导引中心的磁场强度随着角度
图 6 在三线阿基米德螺线上单独加载直流电流时的环形磁导引(虚线)和加载交流调制(实线)后导引中心的磁场强度随着角度
































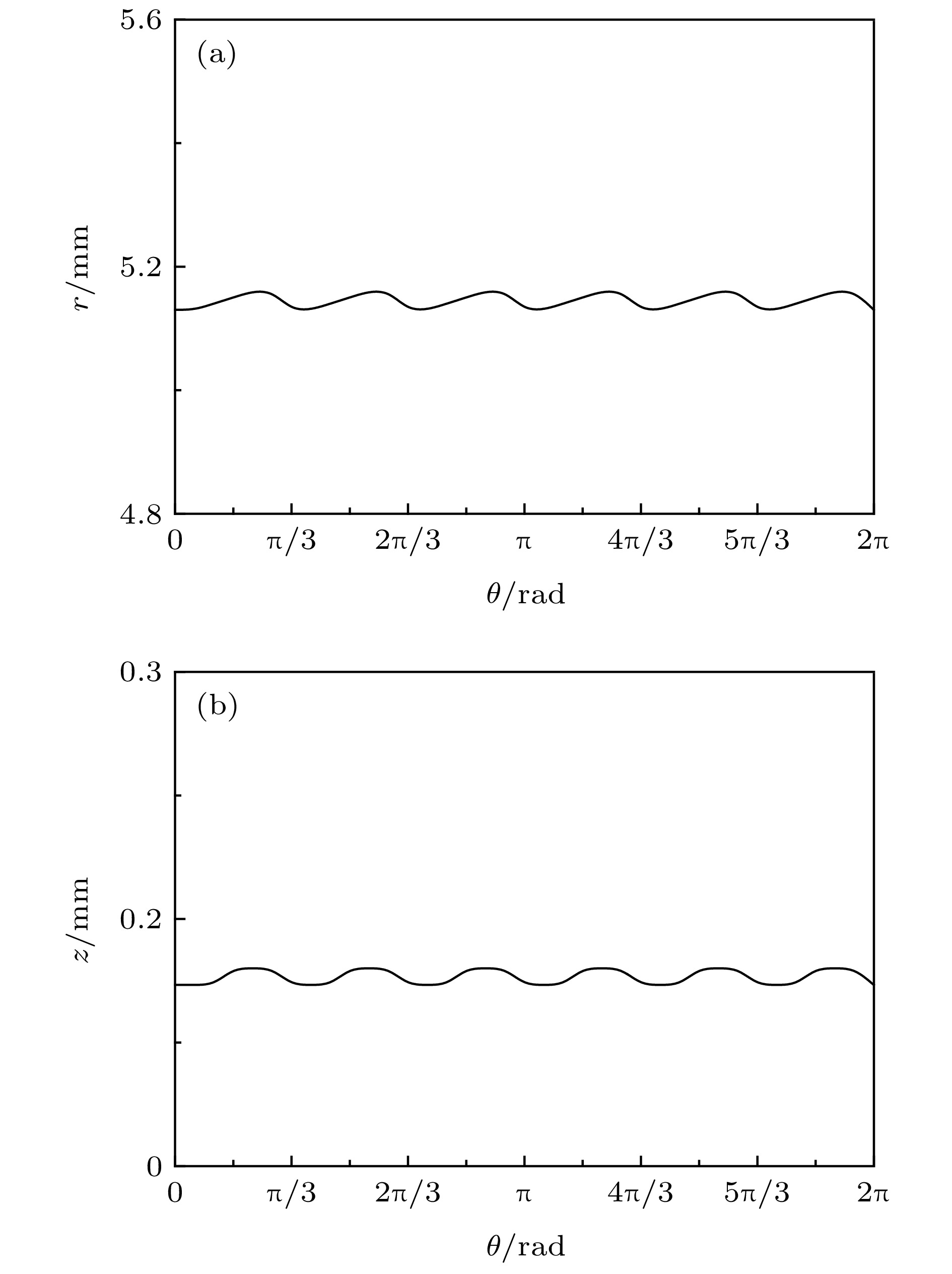 图 7 对三线阿基米德螺线加载交流调制. 加载调制电流的直流成分
图 7 对三线阿基米德螺线加载交流调制. 加载调制电流的直流成分
















 图 8 加载交流调制后的三线阿基米德螺线环形磁导引在高度
图 8 加载交流调制后的三线阿基米德螺线环形磁导引在高度












