摘要: 在社交网络谣言传播模型中, 考虑到辟谣机制和时滞效应对网络谣言传播的影响, 建立基于辟谣机制和时滞效应的SIR谣言传播模型. 利用再生矩阵谱半径方法得到
R 0 ; 根据二次函数图像特征给出谣言盛行平衡点存在的条件; 通过特征值理论和Routh-Hurwitz判据确定无谣言平衡点和谣言盛行平衡点的局部稳定性以及发生Hopf分支的条件; 数值仿真结果表明政府和媒体发布的辟谣信息会加快谣言收敛的速度和降低谣言传播者的最大密度.
关键词: 谣言传播 /
时滞 /
辟谣机制 /
Hopf分支 English Abstract Dynamic analysis of rumor-spread-delaying model based on rumor-refuting mechanism Zhu Lin-He Li Ling Faculty of Science, Jiangsu University, Zhenjiang 212013, China Fund Project: Project supported by the National Natural Science Foundation of China (Grant No. 11571170), the Natural Science Foundation of Jiangsu Province (CN) (Grant No. BK20190836), the Natural Science Foundation of Jiangsu Higher Education Institutions of China (Grant No. 19KJB110001), and the 18 th Batch of Undergraduate Scientific Research Project of Jiangsu University, China (Grant No. 18A290)Received Date: 03 October 2019Accepted Date: 29 October 2019Published Online: 20 January 2020Abstract: In this paper, we establish a susceptible-infected-removed (SIR) rumor spreading model based on the influence of rumor-refuting mechanism and time delay on internet rumor spreading. The threshold R 0 of rumor spreading is obtained by using the spectral radius method of regenerative matrix; the conditions for the existence of rumor prevailing equilibrium point are given according to the quadratic function characteristics; the local stability of rumor-free equilibrium point and rumor prevailing equilibrium point are established by using eigenvalue theory and Routh-Hurwitz criterion; and the criterion for the occurrence of Hopf bifurcation is also established. The numerical simulation results show that the information about refuting rumors, released by the government and the media, can accelerate the convergence rate of rumors and reduce the maximum density of rumor-spreaders.Keywords: rumor propagation /time delay /rejection mechanism /Hopf bifurcation 全文HTML --> --> --> 1.引 言 随着移动通信网络技术的快速发展, 数据传输和消息传送的速率飞速上升, 使得社交网络在我们的日常生活中扮演着愈加重要的角色, 社交网络的多元化、灵活性、快捷性, 使其成为最流行的信息发布和传播方式[1 ] . 然而由于社交网络平台的低门槛的信息传播特征, 使人为发布谣言与传播谣言的可能性大大增加. 控制网络谣言的迅猛传播需要更好地揭示网络谣言传播的内在规律, 因此建立数学模型来分析网络谣言传播的动力学特征迫在眉睫.[2 -11 ] , 如2011年Zhao等[2 ] 结合遗忘因素对社交网络谣言传播的影响, 提出了具有遗忘机制的${\rm S}{\rm I}{\rm R}$ 模型. 2012年, 顾亦然和夏玲玲[3 ] 考虑到人群中还具有潜伏期的谣言传播者(接受谣言但并未立即传播的人群), 建立了在线社交网络的谣言传播${\rm S}{\rm E}{\rm I}{\rm R}$ 模型, 并且给出了基于熟人免疫控制策略的谣言传播控制方法. 2015年, 赵洪涌等[5 ] 综合时空延迟效应和媒体覆盖对社交网络谣言传播的影响, 构建了具有媒体影响的${\rm I}{\rm S}{\rm M}$ 模型, 仿真结果表明: 时间滞后会增加模型的收敛时长, 媒体报道可以抑制谣言的快速传播. 2016年Liu等[6 ] 论证了免疫机制具有暂时性, 建立了具有暂时免疫机制的$ {\rm S}{\rm I}{\rm R}$ 模型. 2018年, Ma等[7 ] 考虑到网络节点间具有相互作用, 将独立的谣言传播者引入$ {\rm S}{\rm I}{\rm R}$ 社交网络谣言传播模型中, 仿真结果表明独立传播者出现的可能性与谣言传播范围呈正相关; 吴晓等[8 ] 认为用户遗忘率和文化程度以及消息缓存可以影响网络谣言的动态传播过程, 提出了全新的$ {\rm U}{\rm R}{\rm B}{\rm D}$ 网络谣言传播动力学模型, 通过平均场理论研究模型的传播规律; 王飞雪和李芳[9 ] 注意到由于个体行为的异质性导致谣言在不同节点之间传播概率不同, 将网络节点自身的影响引入传统$ {\rm S}{\rm I}{\rm R}$ 模型中建立新的谣言传播模型, 通过仿真实验发现与原有SIR模型相比, 改进后的模型能够更有效地控制网络谣言的传播. 2019年, 张菊平等[10 ] 考虑遗忘因素对谣言传播的影响, 构建了具有真实信息传播者的SITR社交网络谣言传播模型, 理论方面给出了系统稳定性的基本判别条件, 数值模拟结果表明真实信息传播者的初值越高, 系统收敛时间越短, 谣言传播者所能达到峰值越低.[12 -15 ] . 因此可以将社交网络中信息传播分为两类: 群体传播和一对一传播. 事实上, 谣言也是通过上述两个渠道进行扩散的. Jia等[16 ] 考虑传播谣言的两种方式: 群体传播和一对一传播, 创新性地建立了如下的$ {\rm S}{\rm I}{\rm R}$ 模型:S 、感染状态I 、恢复状态R . 易感节点未知谣言、感染节点传播谣言、恢复节点接受谣言但不传播谣言; 感染节点通过群体传播向易感节点传播谣言使其转变为一个感染节点, 概率为$ {\lambda }_{1}$ , 或使其转变为恢复状态, 概率为$ \theta$ . 感染节点通过一对一传播向易感节点传播谣言使其转变为一个感染节点, 概率为${\lambda }_{2}$ , 或使其转变为恢复状态, 概率为$ \theta$ . $ {\gamma }_{1}$ 表示感染节点选择群体传播的概率, ${\gamma }_{2}$ 表示感染节点选择一对一传播的概率, $ \alpha $ 表示恢复率, $ \beta $ 表示暂时免疫(恢复的节点转变为易感节点)的概率, $\left\langle k \right\rangle $ 表示网络的平均度, $\varLambda$ 表示出生率, u 表示死亡率. 作者详细研究了系统(1 )式的动力学特征, 分析了无谣言平衡点与谣言盛行平衡点的局部渐近稳定性和全局稳定性, 给出了简单易行的判别准则. 然而, 事实上, 在谣言持续传播的过程中, 为了降低谣言对社会稳定造成的影响, 政府或媒体部门将采取合理的辟谣措施干预谣言传播. 此外, 由于环境影响辟谣过程可能存在时间滞后现象, 进而影响谣言干预效果. 因此, 本文基于上述事实将进一步改进模型(1 )式, 提出新的具有辟谣机制的谣言传播模型.[17 -20 ] 的条件; 接下来通过数值模拟验证前面的理论结果的可靠性, 最后总结上述研究内容.2.模型建立 众所周知, 政府和媒体发布的辟谣信息可以抑制谣言在社交网络中的快速传播[21 -23 ] , 如冉茂洁等[22 ] 综合个体兴趣度差异和辟谣机制在网络谣言传播过程中的影响, 提出了新的${\rm I}{\rm W}{\rm S}{\rm R}$ 谣言传播模型, 数值仿真结果表明提升个体辨识能力和加强辟谣力度可以降低网络谣言传播速度; 王筱莉等[23 ] 考虑到政府辟谣策略对谣言传播的约束, 将辟谣机制引入非均匀网络谣言传播模型中得到新的谣言传播模型, 论证了政府辟谣后谣言传播者的峰值将会下降的重要事实. 可以看到, 模型(1 )式中考虑线性遏制机制$ \alpha I$ 来刻画政府和媒体发布的辟谣信息是为了简化问题, 但是在现实生活中, 政府和媒体对谣言传播的约束能力是有限的, 所以应进一步考虑选取合适的辟谣函数, 以刻画有限的约束能力, 如图1 中所示. 饱和辟谣函数[24 -26 ] ${ h}\left({I}\right)=$ $ {rI}/({1+\alpha I}) $ 由Capasso和Serio引入流行病模型, 其中$ \alpha $ 表示感染者拥挤或变化对易感者个体的影响, rI 用于衡量疾病的感染能力, ${1}/({1+\alpha I})$ 代表治疗延时的感染者的反作用, ${rI}/({1+\alpha I})$ 为当易感人群增加时, 衡量行为变化引起的抑制效应. 由于网络谣言传播和传染病传播在传播机理上十分相似, 所以在网络谣言传播中, 引入辟谣函数$h\left(I\right)= {rI}/({1+\alpha I})$ 来刻画政府和媒体对谣言传播的约束能力.图 1 $\alpha$ 对辟谣函数$h\left(I\right)= {rI}/({1+\alpha I})$ 的影响Figure1. The influence of α on the rejection mechanism $h\left(I\right)= {rI}/({1+\alpha I})$ .[27 -29 ] , 比如谣言传播者未能及时收到辟谣信息或接受信息后未能立刻做出反应, 因此还需在原有辟谣函数中加入时滞, 得到新的辟谣函数$h\left(I\right)=\dfrac{rI\left(t-\tau \right)}{1+\alpha I\left(t-\tau \right)}$ , 用以刻画这种滞后作用. 此外, 在网络谣言传播模型中, 对于同一个谣言而言, 接受谣言并且不传播谣言的用户已经对该谣言进行分析并且做出了自己的主观判断; 从记忆的角度来说, 该类用户对此谣言已经进行了信息加工并存储, 所以接受谣言且不传播谣言的用户通过“遗忘”这种“暂时免疫机制”转化为未知谣言的用户的可能性相对较小, 在理论上是可以将其舍去的. 基于上述分析并结合文献[16 ]的模型, 得到以下改进的${\rm S}{\rm I}{\rm R}$ 社交网络谣言传播模型:r 表示恢复率, $\alpha$ 表示抑制效应, $\tau$ 表示辟谣机制的延迟时间, 其余参数含义同模型(1 ), 且$0\leqslant { \varLambda }, {\lambda }_{1}, {\lambda }_{2}, {\gamma }_{1}, {\gamma }_{2}, \theta, u, r\leqslant 1; \alpha \geqslant 0$ . 系统(2 )式的初值为: $S\left(0\right)\approx 1, I\left(0\right)\approx 0, R\left(0\right)=0$ . 通过计算可得系统(2 )式的正不变集为: ${{Q}}=\left\{\left(S, I, R, \right)\right.\in$ $\left. {{ R}}_{+}^{3}:0\leqslant { S}, { I}, { R}\leqslant { N}\leqslant {{ \varLambda }}/{{u}}\right\} $ . 下面为了简便计算, 令${m}_{1}{=\lambda }_{1}{\gamma }_{1}+{\lambda }_{2}{\gamma }_{2}/\left\langle k \right\rangle $ , ${m}_{2}=\theta {\gamma }_{1}+\theta {\gamma }_{2}/\left\langle k \right\rangle $ .3.平衡点的存在性与后向分支分析 众所周知, 基本再生数在网络谣言传播的动力学分析中起着重要的作用. 一般来说, 基本再生数是用来衡量谣言传播的感染能力的, 为判断谣言在社交网络中是流行还是消亡提供了重要依据. 显然, 系统(2 )式总是存在一个无谣言平衡点${E}_{0}= $ $\left({\varLambda }/{u}, {\rm 0, 0}\right)$ , 根据Driessche[30 ] 和Al-Darabsah[31 ] 计算基本再生数的方法, 可以得到基本再生数为${R}_{0}=\dfrac{{m}_{1}\varLambda }{u(u+r)}.$ 接下来将讨论在何种条件下, 系统(2 )式将存在谣言盛行平衡点.2 )右端为零, 可以得到4 )式有$I=0$ 时, 有$S={\varLambda }/{u},\; R=0$ , 即为无谣言平衡点${E}_{0}=\left({\varLambda }/{u}, {\rm 0, 0}\right)$ . 将(5 )式中S 的表达式代入(8 )式可得$[1+\alpha I]{\left[\right(m}_{1}+{m}_{2})I+u]$ , 得到${\rm \alpha } > 0,\; u > 0,\; {m}_{1} > 0,\; {m}_{2} > 0$ , 可得$a > 0$ . 下面将对剩下的系数进行分类讨论进而得到方程(9 )的解的情况.${\rm c} < 0$ 时, 方程(9 )有唯一的正解, 记为${{I}_{1}}^{*}$ , 这说明系统(2 )式存在唯一的谣言盛行平衡点${{E}_{1}}^{*}$ .$c=0$ 时, 方程(9 )等价于10 )的解为${I}_{1}=0$ 或${I}_{2}=-{b}/{a}$ . 若$ b < 0$ , 则有${I}_{2} > 0$ , 也就是说方程(10 )存在一个正解, 这意味着系统(2 )式存在一个谣言盛行平衡点记为${{E}_{2}}^{*}$ ; 相反的若$ b\geqslant 0$ , 则有${I}_{2} < 0$ , 那么方程(10 )没有正解, 表明系统(2 )式不存在谣言盛行平衡点.${\rm c} > 0$ 时, 令$b\geqslant 0$ , 方程(9 )无正解, 表明系统(2 )没有谣言盛行平衡点.$b < 0$ , 则有以下三种情况:$\varDelta > 0$ , 方程(9 )有两个正解, 即系统(2 )式存在两个谣言盛行平衡点, 记为${E}_{3}^{*}{\text{和}}{E}_{4}^{*}$ ;$\varDelta =0$ , 方程(9 )有一个正解, 即系统(2 )式存在一个谣言盛行平衡点${{E}_{5}}^{*}$ ;$\varDelta < 0$ , 方程(9 )无正解, 这表明系统(2 )式没有谣言盛行平衡点.$c={m}_{1}\varLambda \left({1}/{{R}_{0}}-1\right)$ , 可得如下等价关系:定理1 1)若${R}_{0} > 1$ , 系统(2 )式存在一个谣言盛行平衡点${E}_{1}^{*}, $ 并且${R}_{0}=1$ 且${\rm b}\geqslant 0$ , 系统(2 )式不存在谣言盛行平衡点; 若${R}_{0}=1$ 且$b < 0$ , 系统(2 )式存在唯一的谣言盛行平衡点${E}_{2}^{*}$ , 并且${R}_{0} < 1$ 且${\rm b}\geqslant 0$ , 系统(2)不存在谣言盛行平衡点; 若${R}_{0} < 1$ 且${\rm b} < 0$ , 则有:$\varDelta >0$ , 系统(2 )式存在两个谣言盛行平衡点, 记为${E}_{3}^{*}, {E}_{4}^{*}$ , 且$\varDelta =0$ , 系统(2 )式存在一个谣言盛行平衡点${{E}_{5}}^{*}$ , 且$\varDelta < 0$ , 系统(2 )式不存在谣言盛行平衡点.${R}_{0} < 1$ , $ b < 0$ , $\varDelta > 0$ 时, 系统(2 )式存在两个谣言盛行的平衡点, 这意味着谣言不会被消除, 仍在社交网络上传播. 因此, 为了控制谣言的传播, 当后向分支发生时, 将计算一个更小的阈值.定理2 若${R}_{0} < 1$ , $b < 0$ , $\varDelta > 0$ 成立, 则系统(2 )式将会在${R}_{0}=1$ 时发生后向分支.证明 : 从定理1可以看出, 当参数满足${R}_{0} < 1$ , $b < 0$ 且$\varDelta >0$ 时, 系统(2 )式存在两个谣言盛行平衡点, 换言之, 当${R}_{0}$ 落在区间(${R}^{*}$ , 1)时, 一个后向分支将会在${R}_{0}=1$ 处出现. 同时, ${R}^{*}$ 的值由$\varDelta =0$ 确定, 因此为了得到一个较小的阈值${R}^{*}$ , 令$\varDelta =0$ , 进而可以得到临界的基本再生数为定理3 1)若${R}^{*} < {R}_{0} < 1$ 系统(2 )式存在两个谣言盛行平衡点, 换言之系统(2 )式将会在${R}_{0}=1$ 处发生后向分支;${R}_{0} > 1$ , 系统(2 )式存在唯一的谣言盛行平衡点, 换言之, 谣言将会继续在社交网络中传播;${R}_{0} < {R}^{*} < 1$ , 系统(2 )式不存在谣言盛行平衡点, 意味着谣言最终会消亡.4.平衡点的稳定性分析 24.1.无病平衡点$ {E}_{0}$ ![]()
![]()
4.1.无病平衡点$ {E}_{0}$ 的稳定性分析 系统(2 )式在无谣言平衡点${E}_{0}$ 的雅可比矩阵为${E}_{0}$ 处的特征方程为${\rm \lambda }=-u$ 是方程(11 )的二重根, 接下来只需要考虑${\rm \lambda }-\dfrac{{m}_{1}\varLambda }{u}+u+r{{\rm e}}^{-\lambda \tau }=0$ 的特征根的正负情况.${\rm \tau }=0$ 时, ${\rm \lambda }=\dfrac{{m}_{1}{ \varLambda }}{u}-u-r$ . 因此, 若${R}_{0} < 1$ , 那么${\rm \lambda }=\dfrac{{m}_{1}{ \varLambda }}{u}-u-r < 0$ , 意味着方程(11 )的所有根的实部都小于0, 由特征值理论可知${E}_{0}$ 是局部渐近稳定的. 相反地, 若${R}_{0} > 1$ , 那么方程(11 )存在一个正根$\dfrac{{m}_{1}\varLambda }{u}-u-r$ , 由特征值理论可知, ${E}_{0}$ 是不稳定的.${\rm \tau } > 0$ 时, 令$F\left(0\right) < 0$ , 即${R}_{0} > 1$ 时, 方程(12 )至少有一个正根, 因此, ${E}_{0}$ 是不稳定的.证: 当$u > r, \dfrac{{m}_{1}\varLambda }{u} < u+r$ 且$\dfrac{{m}_{1}\varLambda }{u} < u-r$ 时, ${E}_{0}$ 是局部渐近稳定的;$u-r < \dfrac{{m}_{1}\varLambda}{u} < u+r$ 时, ${E}_{0}$ 是不稳定的.$\lambda ={\rm i}\omega ({\rm \omega } > 0)$ 是方程(12 )的解, 将其代入方程(12 )可得${(u-{{m}_{1}\varLambda }/{u})}^{2} > {r}^{2}$ , 方程(13 )不存在正解, 由平方差公式有$u-\dfrac{{m}_{1}{ \varLambda }}{u}-r > 0$ 且$u-\dfrac{{m}_{1}{ \varLambda }}{u}+r > 0 \Leftrightarrow \dfrac{{m}_{1}{ \varLambda }}{u} < $ $ u-r $ 且$\dfrac{{m}_{1}{ \varLambda }}{u} < u+r,$ $u-\dfrac{{m}_{1}{ \varLambda }}{u}-r < 0$ 且$u-\dfrac{{m}_{1}{ \varLambda }}{u}+r < 0 \Leftrightarrow \dfrac{{m}_{1}{ \varLambda }}{u} > $ $u-r $ 且$\dfrac{{m}_{1}{ \varLambda }}{u} > u+r.$ ${R}_{0} > 1$ 时, ${E}_{0}$ 是不稳定的, 因此舍弃情况2); 又因为${m}_{1}, \varLambda, u\geqslant 0$ , 所以$\dfrac{{m}_{1}\varLambda }{u}\geqslant 0$ , 由$\dfrac{{m}_{1}\varLambda }{u} < u-r$ 可以得知$ u>r$ , 因此当$u > r, \dfrac{{m}_{1}\varLambda }{u} < u+r$ 且$\dfrac{{m}_{1}\varLambda }{u} < u-r$ , ${E}_{0}$ 是局部渐近稳定的.${\left(u- {{m}_{1}\varLambda }/{u}\right)}^{2} < {r}^{2} $ , 方程(13 )存在正解${\omega }_{0}>0$ , 使得${\rm \lambda }={\rm i}{\omega }_{0}$ 为方程(12 )的解, 又$r > 0$ , 上式中只可能是$u-\dfrac{{m}_{1}\varLambda }{u}+r > 0$ , 因此有$u-\dfrac{{m}_{1}\varLambda }{u}-r < 0$ 且$u-\dfrac{{m}_{1}\varLambda }{u}+r > 0$ . 简化后可得$u-r < \dfrac{{m}_{1}{ \varLambda }}{u} < u+r$ . 因此当$\dfrac{{m}_{1}{ \varLambda }}{u} < u+r$ 且$\dfrac{{m}_{1}{ \varLambda }}{u} > u-r$ 时, 方程(13 )存在正解${\omega }_{0}$ , 也就是说方程(12 )有一对纯虚根${\rm \lambda }=\pm {\rm i}{\omega }_{0}$ . 令${\left.\dfrac{{\rm d}{\rm \lambda }}{{\rm d}{\rm \tau }}\right|}_{\tau ={\tau }_{0}}$ 的正负情况. 直接计算发现12 ), 有$\dfrac{{m}_{1}{ \varLambda }}{u}-u-\lambda =r{{\rm e}}^{-\lambda \tau }$ , 因此$\tau ={\tau }_{0}$ 附近发生Hopf分支现象.${R}^{c}=\dfrac{{m}_{1}\Lambda }{u(u-r)}$ , 我们得到以下定理.定理4 1) 当$0 < {R}^{c} < 1$ 且${R}_{0} < 1$ 时, 无谣言平衡点$ {E}_{0}$ 对所有的${\rm \tau }\geqslant 0$ 都是局部渐近稳定的;${R}^{c} > 1$ 且${R}_{0} < 1$ 时, 无谣言平衡点${E}_{0}$ 对所有的$0\leqslant {\rm \tau } < {\tau }_{0}$ 都是局部渐近稳定的; 当$ {\rm \tau } > {\tau }_{0}$ 无谣言平衡点${E}_{0}$ 不稳定, 换言之, 系统(2)在$\tau ={\tau }_{0} $ 附近发生Hopf分支;${R}_{0}>1$ 时, 无谣言平衡点${E}_{0}$ 是不稳定的.4.2.谣言盛行平衡点${E}_{1}^{*}$ ![]()
![]()
-->4.2.谣言盛行平衡点${E}_{1}^{*}$ 的稳定性分析 系统(2 )式在谣言盛行平衡点${E}_{1}^{*}$ 处的雅可比矩阵为5 )式中S 的表达式可得$({m}_{1}+{m}_{2}){I}_{1}^{*}+$ $u=\dfrac{\varLambda }{{S}_{1}^{*}} . $ 令$\tau =0$ 时, 方程(19 )等价于$ {u}, {m}_{1}, {m}_{2}, {m}_{3}, {I}_{1}^{*} > 0 $ , 因此, 若${m}_{4} > 0 $ 则${p}_{11}+{q}_{11} > 0, {p}_{01}+{q}_{01} > 0$ , 由赫尔维茨判据可知谣言盛行平衡点${E}_{1}^{*}$ 是局部渐近稳定的.$\tau > 0$ 时, 假设${\rm \lambda }={\rm i}\,{\rm \omega }\left({\rm \omega } > 0\right)$ 是方程(19 )的一个解, 将其代入方程(19 )得$T={\omega }^{2}$ , ${f}_{1}=\left({p}_{11}^{2}-2{p}_{01}-{q}_{11}^{2}\right), \;{f}_{2}={p}_{01}^{2}-$ ${q}_{01}^{2} $ , 那么方程(22 )等价于${f}_{1}={u}^{2}+{m}_{4}^{2}-{m}_{3}^{2}, \;{f}_{2}={\left(u{m}_{4}\right)}^{2}-\dfrac{{\left({m}_{3}\varLambda \right)}^{2}}{{{(S}_{1}^{*})}^{2}}.$ 引理1 1) 若${f}_{2}\geqslant 0$ , 方程(23 )无正实根.$ {f}_{2} < 0$ , 方程(23 )总会有一个正实根.证明 根据$0\leqslant {{S}_{1}}^{*}\leqslant \dfrac{\varLambda }{u}\Rightarrow 0\leqslant {\left({{S}_{1}}^{*}\right)}^{2}\leqslant \dfrac{{\varLambda }^{2}}{{u}^{2}}$ , 可得$ \dfrac{{\left({m}_{3}\varLambda \right)}^{2}}{{{{(S}_{1}}^{*})}^{2}}\geqslant {\left(u{m}_{3}\right)}^{2}$ .${f}_{2}={\left(u{m}_{4}\right)}^{2}-\dfrac{{\left({m}_{3}{\varLambda }\right)}^{2}}{{{{(S}_{1}}^{*})}^{2}}\geqslant 0$ , 则有${\left(u{m}_{4}\right)}^{2}\geqslant \dfrac{{\left({m}_{3}{\varLambda }\right)}^{2}}{{{{(S}_{1}}^{*})}^{2}}\geqslant {\left(u{m}_{3}\right)}^{2}$ .${{m}_{4}}^{2}\geqslant {{m}_{3}}^{2}$ , 那么${f}_{1}={u}^{2}+{{m}_{4}}^{2}$ $ -{{m}_{3}}^{2}\geqslant 0 $ .${f}_{2}\geqslant 0$ 时, 有${f}_{1}\geqslant 0$ , 因此, 根据二次方程图像特征可知方程(23 )没有正根, 这意味着不存在$\omega > 0$ 满足$\lambda ={\rm i}\omega $ 是方程(19 )的一个解, 也就是说方程(19 )不存在正根, 那么谣言盛行平衡点${{E}_{1}}^{*}$ 是局部渐近稳定的. 相反地, 若${f}_{2} < 0$ , 易知无论$ {f}_{1} $ 取何值时, 方程(23 )至少存在一个正根, 也就是说方程(19 )有一对纯虚根${\rm \lambda }=\pm {\rm i}{{\omega }_{0}}^{*}$ .${\left.\dfrac{{\rm d}{\rm \lambda }}{{\rm d}{\rm \tau }}\right|}_{\tau ={\tau }_{0}}$ 的正负情况, 显然21 )式, 有$\tau ={\tau }_{0}^{*}$ 附近发生Hopf分支现象.定理5 1)若${R}_{0} > 1$ , ${m}_{4} > 0$ 成立, 则当$\tau =0$ 时谣言盛行平衡点$ {E}_{1}^{*}$ 是局部渐近稳定的.${R}_{0} > 1$ , ${m}_{4} > 0$ , ${f}_{2}\geqslant 0$ 成立, 则谣言盛行平衡点${E}_{1}^{*}$ 对所有的$\tau \geqslant 0$ 都是局部渐近稳定的.${R}_{0} > 1$ , ${m}_{4} > 0$ , ${f}_{2} < 0$ 成立, 则当$\tau \in \left[0, {\tau }_{0}^{*}\right)$ 时, 谣言盛行平衡点${E}_{1}^{*}$ 是局部渐近稳定的; 当$\tau > {\tau }_{0}^{*}$ 时, 谣言盛行平衡点${E}_{1}^{*}$ 不稳定, 即谣言盛行平衡点${E}_{1}^{*}$ 在$\tau ={\tau }_{0}^{*}$ 附近发生Hopf分支.5.数值模拟 例1 在系统(2 )式中, 选取参数λ 1 = 0.5, λ 2 = 0.8, γ 1 = 0.4, γ 2 = 0.5, θ = 0.1, u = 0.25, ${\lambda _1} = 0.5, \;{\lambda _2} = 0.8, \;{\gamma _1} = 0.4, \;{\gamma _2} = 0.5, \;\theta = 0.1$ , u = 0.25, $\varLambda = 0.25, \;\alpha = 5, \;r = 0.15, \left\langle k \right\rangle = 8$ , 通过简单计算可以得到基本再生数${R}_{0}=0.625 < 1, {R}^{c}=2.5 > $ 1.0, ${\tau }_{0}=10.4723$ , 因此, 系统(2 )式的无谣言平衡点${E}_{0}=(1, {\rm 0, 0})$ 在$\tau ={\tau }_{0}$ 处发生Hopf分支, 数值模拟结果如图2 所示.图 2 (a) $\tau =10.3$ ; (b) $\tau =10.5$ Figure2. (a) $\tau =10.3$ ; (b) $\tau =10.5$ 图2(a) 可以看出: 随着时间的推移, $S\left(t\right)$ 趋向于1, $I\left(t\right)$ 和$R\left(t\right)$ 趋向于零, 这意味着散播谣言的用户的密度最终将转变为零且不再发生波动, 即谣言最终消除. 同时, 从图2(b) 可以看出: 随着时间推移, 传播谣言个体的密度处于持续波动状态, 这意味着谣言在网络中以周期形式持续传播. 该现象表明时滞的扩大会导致平衡点稳定性发生变化, 换言之, 如果政府延迟执行有效的辟谣机制, 将会导致谣言在网络中呈现周期性爆发现象, 以致于加大了网络谣言传播的控制难度, 极大的危害了网络信息安全. 因此, 通过分析时滞导致的Hopf分支现象, 可以有效地反映政府辟谣机制的执行功效, 从而有利地指导政府开展及时合理的辟谣政策.例2 本例主要研究恢复率r 对传播谣言用户密度的影响. 首先, 考虑${R}_{0} < 1$ 的情况, 在系统(2 )式中, 不妨取参数λ 1 = 0.5, λ 2 = 0.8, γ 1 = 0.6, γ 2 = 0.5, θ = 0.1, u = 0.25, $\varLambda =0.25, \;\alpha =5, \left\langle k \right\rangle =8$ , r 的值为0.05, 0.15, 0.25, 0.35, 得出$I\left(t\right)$ 的变化趋势如图3(a) , 其次考虑${R}_{0} > 1$ 的情况, 令λ 1 = 0.7, λ 2 = 0.8, γ 1 = 0.8, γ 2 = 0.9, θ = 0.1, u = 0.25, $\varLambda =0.25,\; \alpha =5, \left\langle k \right\rangle =8$ , r 的值为0.05, 0.15, 0.25, 0.35, 得出$I\left(t\right)$ 的变化趋势如图3(b) .图 3 (a) ${ R}_{0} < 1$ ; (b) ${ R}_{0} > 1$ Figure3. (a) ${ R}_{0} < 1$ ; (b) ${ R}_{0} > 1$ .图3(a) 可以看出, 随着时间的推移, $I\left(t\right)$ 逐渐接近零, 并且随着恢复率r 的增大, $I\left(t\right)$ 趋于稳定的时间越来越短, 即恢复率r 越大, 谣言消亡的速度越快. 换言之, 恢复率越高, 传播谣言用户的密度下降得越快, 趋于稳定的时间越短. 同时, 从图3(b) 可以看出, 随着恢复率r 的值增大, $I\left(t\right)$ 的峰值变小, 也即恢复率越高, 那么传播谣言用户的密度的峰值越低.例3 本例主要考察抑制效应${\rm \alpha }$ 对传播谣言用户密度的影响. 首先, 考虑$ {R}_{0} < 1$ 的情况: 在系统(2 )中, 选取参数λ 1 = 0.5, λ 2 = 0.8, γ 1 = 0.4, γ 2 = 0.5, θ = 0.1, u = 0.2, $\varLambda =0.2, \;\left\langle k \right\rangle =8$ , 分别取$\alpha $ 为0, 3, 5, 8, 得出$I\left(t\right)$ 的变化趋势如图4(a) , 其次考虑${R}_{0} > 1$ 的情况, 令λ 1 = 0.7, λ 2 = 0.8, γ 1 = 0.8, γ 2 = 0.9, θ = 0.1, u = 0.4, $\varLambda =0.4, \left\langle k \right\rangle =8$ , 同样地, 取$\alpha$ 为0, 3, 5, 8, 得出$I\left(t\right)$ 的变化趋势如图4(b) .图 4 (a) ${R}_{0} < 1$ ; (b) ${R}_{0} > 1$ Figure4. (a) ${R}_{0} < 1$ ; (b) ${R}_{0} > 1$ .图4(a) 可以看出: 随着时间的推移, $I\left(t\right)$ 趋向于零, 并且随着抑制效应$\alpha $ 的增大, $I\left(t\right)$ 趋于稳定的时间越来越长, 也就是抑制效应$\alpha $ 的值越高, 谣言消亡的速度越慢. 换言之, 抑制效应影响程度越高, 那么传播谣言用户的密度下降得越慢, 趋于稳定的时间越长. 同时, 从图4(b) 可以看出, 随着抑制效应$\alpha$ 的值增大, $I\left(t\right)$ 的峰值越高, 这表明当${R}_{0} > 1$ 时, 如果抑制效应$ \alpha $ 越高, 那么传播谣言用户的密度的峰值越高.例4 本例主要研究出生率$\varLambda $ 和恢复率r 对基本再生数${R}_{0}$ 的影响, 选取系统(2 )式中参数λ 1 = 0.5, λ 2 = 0.8, γ 1 = 0.7, γ 2 = 0.6, θ = 0.1, u = 0.35, α = 2, $ \left\langle k \right\rangle =8$ . 观察${R}_{0}$ 的变化趋势, 如图5 所示. 图5 表示在不同的出生率$ {\varLambda }$ 、恢复率r 下${R}_{0}$ 的取值情况. 从图5(a) 中可以发现: 随着恢复率r 不断增大, 基本再生数${R}_{0}$ 的值不断减小; 当恢复率r 逐渐增大并增大到一定程度时, ${R}_{0}$ 小于1, 意味着谣言最终消亡. 相反地, 随着出生率$ \varLambda$ 的增大, 基本再生数${R}_{0}$ 的值不断增大, 也就是说出生率$\varLambda $ 与基本再生数${R}_{0}$ 呈正相关关系. 图5(b) 给出了${R}_{0} < 1$ 与${R}_{0} > 1$ 时对应的出生率${\varLambda }$ 与恢复率r 的取值范围, 明确了谣言传播的可知措施, 如增加恢复率r 等.图 5 出生率$\varLambda$ 与恢复率r 对基本再生数$ {R}_{0}$ 的影响Figure5. Influence of birth rate $\varLambda$ and recover rate r on the basic productive number ${R}_{0}$ .例5 在本例中, 选取参数λ 1 = 0.5, λ 2 = 0.5, γ 1 = 0.4, γ 2 = 0.2, θ = 0.1, u = 0.22, $\varLambda =0.8 $ , α = 2, r = 0.55, $ \left\langle k \right\rangle =8$ , 通过简单计算可以得到基本再生数${R}_{0}=0.9917, {R}^{*}=0.9734$ , 即${R}^{*}<{R}_{0} < 1$ , 满足定理3条件, 那么系统(2 )式存在两个谣言盛行平衡点, 即系统(2 )式将会在${R}_{0}=1$ 时发生后向分支, 如图6 所示.图 6 后向分支Figure6. Backward branch.6.结 论 综合考虑辟谣机制和时滞效应对社交网络谣言传播机制的影响, 建立了基于辟谣机制的时滞谣言传播模型. 利用再生矩阵谱半径方法求出模型的基本再生数${R}_{0}$ ; 根据二次函数图像特征给出谣言盛行平衡点存在的条件: 若${R}_{0} > 1$ , 系统(2 )式总会存在谣言盛行平衡点${{E}_{1}^{*}}$ ; 若${R}_{0}=1$ 且$b\geqslant 0$ , 系统(2 )式没有谣言盛行平衡点; 若${R}_{0}=1$ 且$ b < 0$ , 系统(2 )式存在唯一的谣言盛行平衡点$E_2^*$ ; 若${R}_{0} < 1 $ 且$b \geqslant 0$ , 系统(2 )式没有谣言盛行平衡点; 若${R}_{0} < 1$ 且$b < 0, \varDelta =0$ , 系统(2 )式存在两个谣言盛行平衡点${{E}_{3}^{*}}$ 与${{E}_{4}^{*}}$ ; 若${R}_{0} < 1$ 且$b < 0, \varDelta < 0 $ , 系统(2 )式存在谣言盛行平衡点${{E}_{5}^{*}}$ ; 若${R}_{0} < 1$ 且$b < 0, \varDelta < 0 $ , 系统(2 )式没有谣言盛行平衡点. 通过特征值理论和Routh-Hurwitz判据确立了无谣言平衡点和谣言盛行平衡点的局部渐近稳定性: 对无谣言平衡点${E}_{0}$ , 当$0 < {R}^{c} < 1$ 且${R}_{0} < 1$ 时, ${E}_{0}$ 对于所有的$\tau \geqslant 0$ 都是局部渐近稳定的; 当$ {R}_{0} > 1$ 时, ${E}_{0}$ 不稳定; 当${R}^{c} > 1$ 且${R}_{0} < 1$ 时, ${E}_{0}$ 在$\tau ={\tau }_{0}$ 时发生Hopf分支. 对谣言盛行平衡点${{E}_{1^{*}}}$ , 若${R}_{0} > 1, {m}_{4} > 0$ , ${f}_{2}\geqslant 0$ , 谣言盛行平衡点${{E}_{1}^{*}}$ 对所有的$\tau \geqslant 0$ 都是局部渐近稳定的; 若${R}_{0} > 1$ , ${m}_{4} > 0$ , ${f}_{2} < 0$ , 谣言盛行平衡点${{E}_{1}^{*}}$ 在$\tau ={{\tau }_{0}^{*}} $ 时发生Hopf分支. 最后, 通过数值模拟, 本文验证了理论分析的可靠性并探讨了个别参数对模型的影响: 恢复率r 的值越大, 当${R}_{0} < 1 $ 时, $I\left(t\right)$ 趋于稳定的时间越短, 速度越快, 当${R}_{0} > 1 $ 时, $I\left(t\right)$ 所能达到的峰值越小, 谣言传播的范围更小, 更容易控制; 抑制效应$\alpha $ 越大, 当${R}_{0} < 1 $ 时, $I\left(t\right)$ 趋于稳定的时间越长, 速度越慢, 当${R}_{0} > 1 $ 时, ${\rm I}\left({\rm t}\right)$ 所能达到的峰值越高; 恢复率r 不断增大, 基本再生数$ {R}_{0}$ 的值不断减小; 当恢复率r 逐渐增大并增大到一定程度时, ${R}_{0}$ 小于1, 意味着网络谣言最终消亡. 相反地, 随着出生率$\varLambda $ 的增大, 基本再生数${R}_{0}$ 的值不断增大, 也就是说出生率${ \varLambda }$ 与基本再生数${R}_{0}$ 呈正相关关系; 并给出了${R}_{0} < 1$ 与${R}_{0} > 1$ 时对应的出生率${ \Lambda }$ 与恢复率r 的取值范围; 最后验证了发生后向分支的条件. 当前, 本文主要分析了辟谣机制和时滞效应对社交网络谣言传播的影响, 在未来的工作中将进一步考虑个体行为差异和空间异质性对网络谣言传播造成的影响[32 ] , 完善相关的网络谣言传播模型. 

























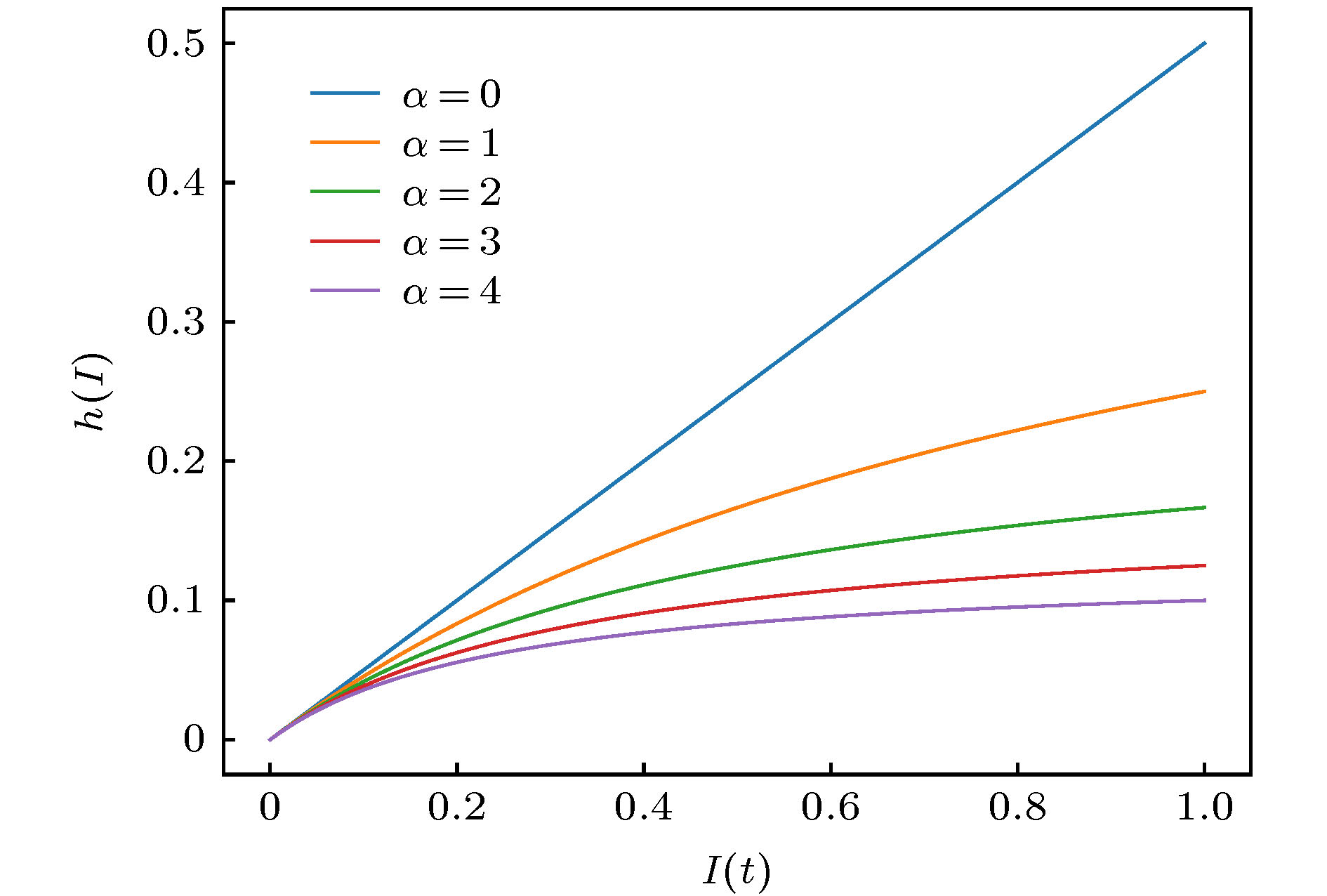 图 1
图 1 














































































































































































































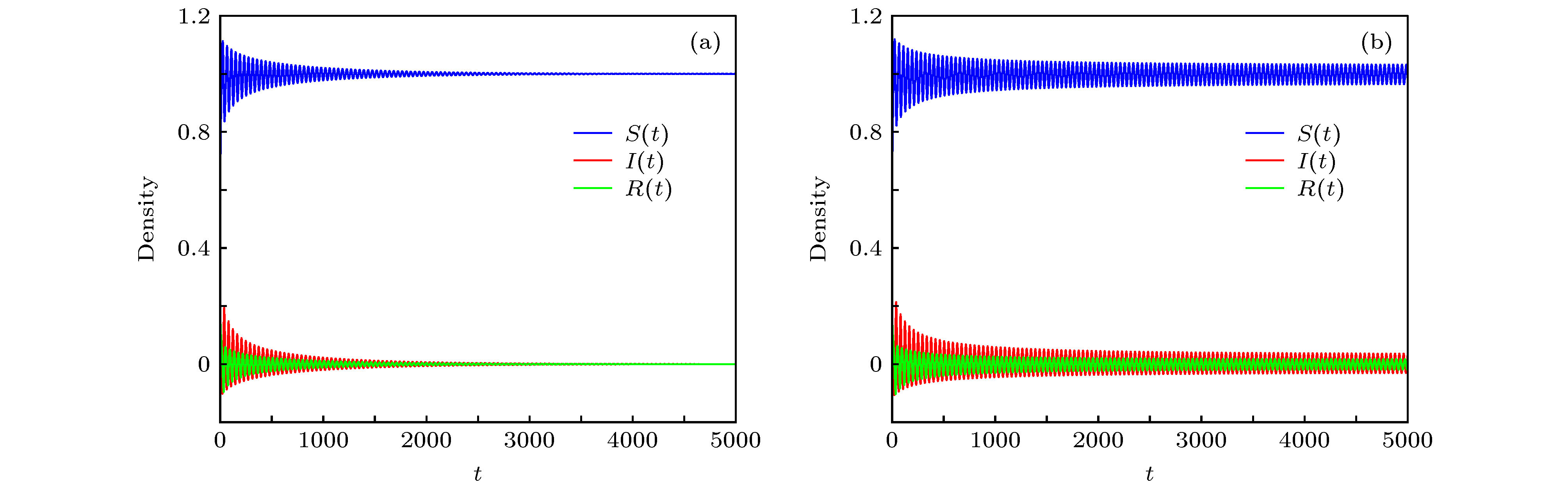 图 2 (a)
图 2 (a) 












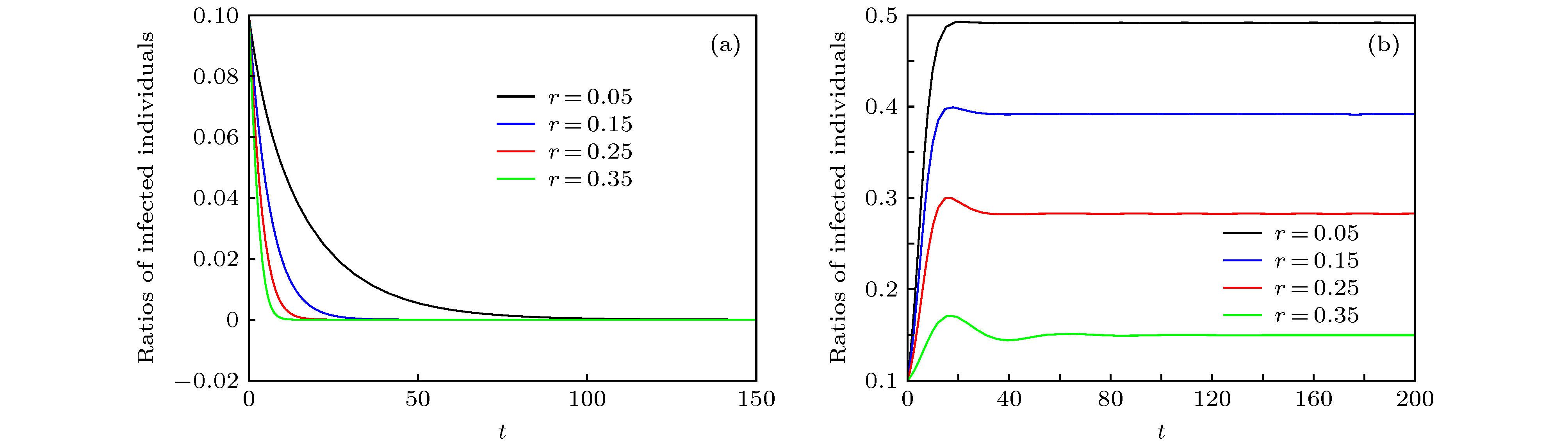 图 3 (a)
图 3 (a) 















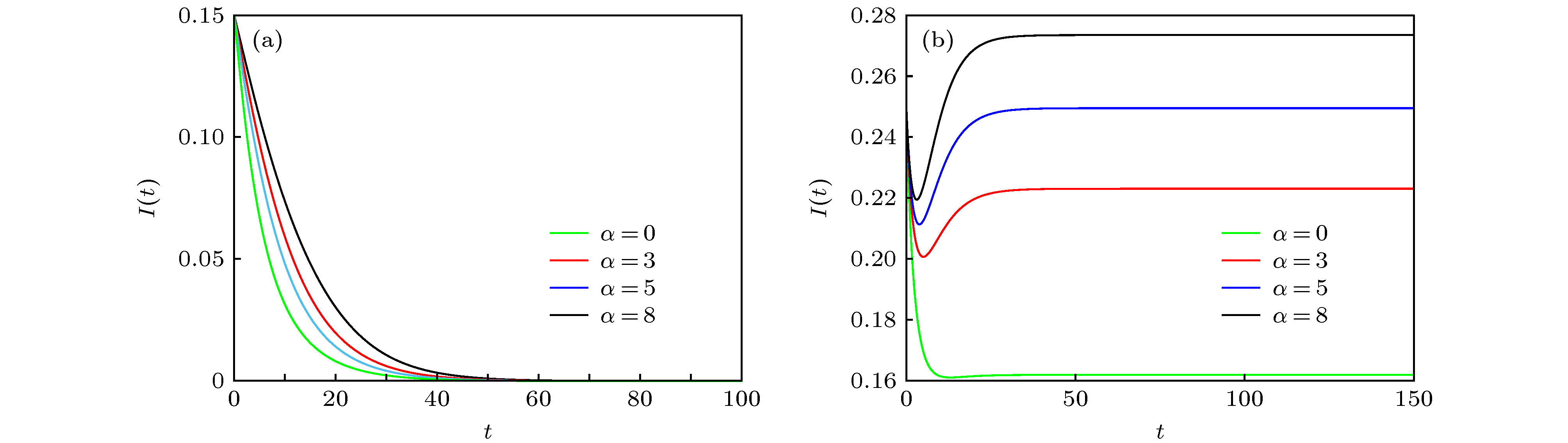 图 4 (a)
图 4 (a) 


























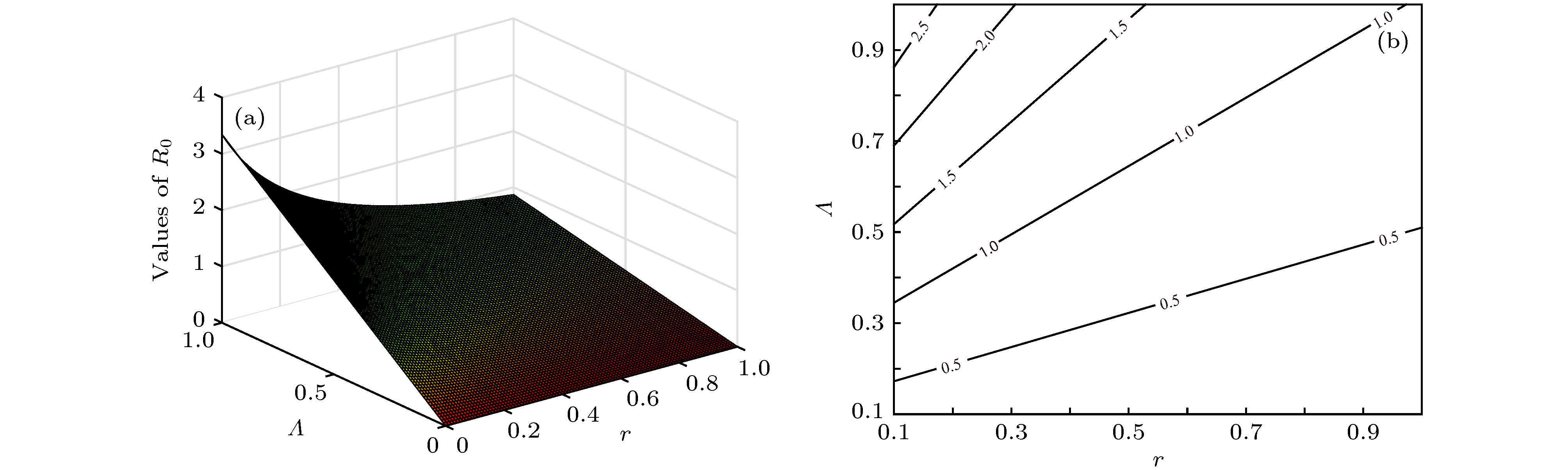 图 5 出生率
图 5 出生率








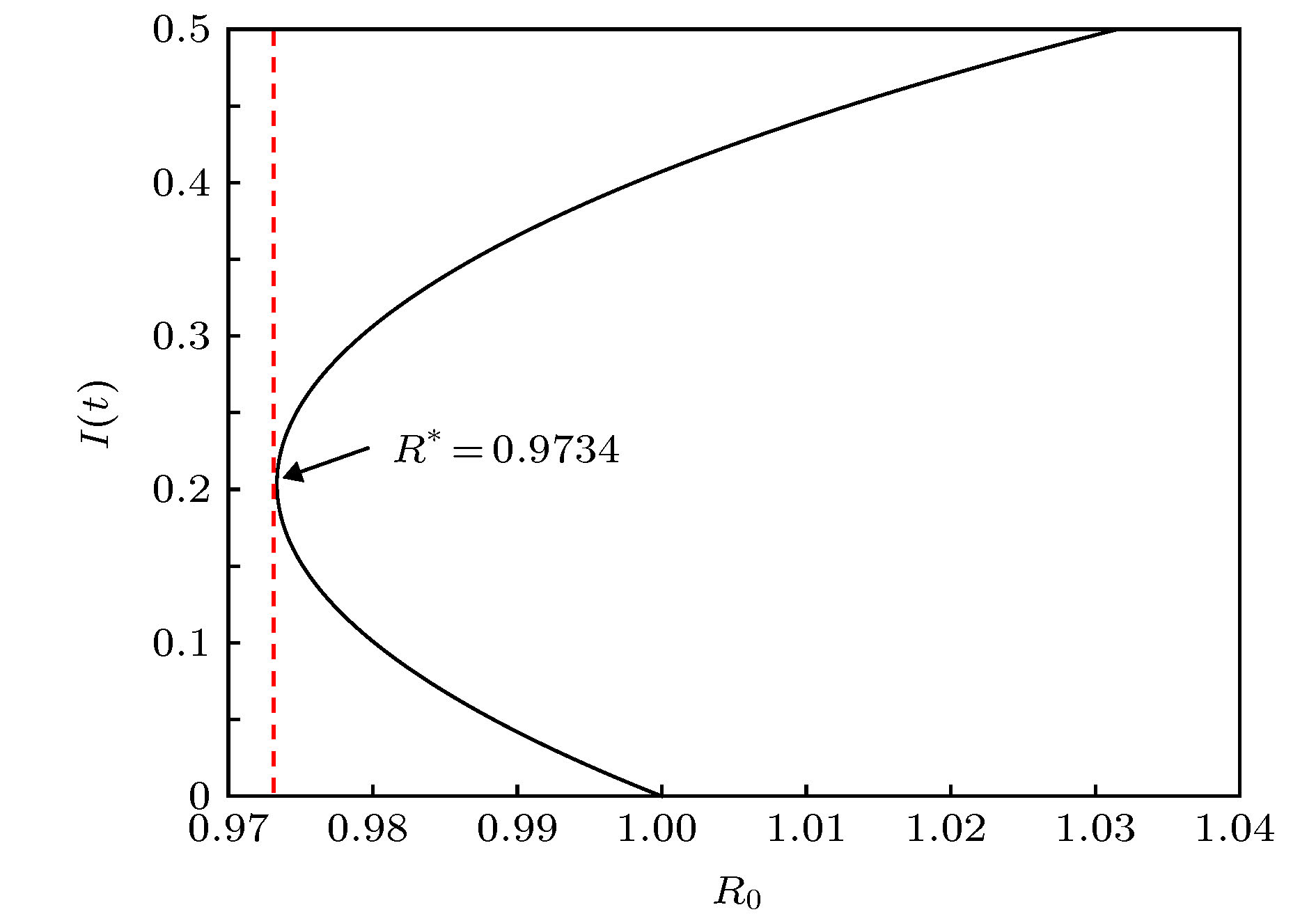 图 6 后向分支
图 6 后向分支

























































