1.Key Laboratory of Ocean Acoustics and Sensing, Ministry of Industry and Information Technology, School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China 2.Key Laboratory of Noise and Vibration Research, Chinese Academy of Sciences, Beijing 100190, China
Fund Project:Project supported by the National Key Research and Development Program of China (Grant No. 2016YFF0200902) and the National Natural Science Foundation of China (Grant Nos. 11474230, 11704314)
Received Date:28 May 2019
Accepted Date:25 June 2019
Available Online:01 October 2019
Published Online:05 October 2019
Abstract:The coda wave interferometry is widely used in the fields of geophysics and material science. As an extension of coda wave interferometry, imaging through coda wave interferometry is a technique to obtain the spatial distribution of small velocity perturbations within a scattering medium by using time lapse and sensitivity kernels in the diffusion approximation. However, imaging through coda wave interferometry is essentially an undetermined problem without definite solution, resulting in some difficulties in accurately locating small velocity perturbations within a scattering medium. Meanwhile, compressed sensing has been used in many physical imaging systems in recent years. In this paper, we present an imaging method through coda wave interferometry to solve aforementioned problems by using sparse reconstruction algorithm which is involved in compressed sensing theory. The sparsity of velocity perturbation in its space distribution is taken into account in the proposed method. Firstly, the undetermined equation for inversion imaging is established based on the time-lapse data obtained by coda wave interferometry and the sensitivity kernel matrix in the diffusion approximation. Secondly, the inversion equation is reconstructed by using the sparse transformation within the framework of compressed sensing theory. Finally, the minimization of l1 norm is solved by the compressed sensing reconstruction algorithm, and the imaginary part for the spatial distribution of velocity perturbations is subsequently obtained. This method can accurately capture the spatial locations and ranges of both single velocity perturbation and multiple velocity perturbations in scattering medium with high computational efficiency. The numerical simulations are compared with the results from the existing linear least squares method, demonstrating that the proposed method can avoid the complex parameter determination operation, thus greatly improving the accuracy of inversion images, and also significantly reducing the calculating time. Keywords:imaging through coda wave interferometry/ compressed sensing/ sensitivity kernels/ inverse problems
尾波干涉理论指出, 多散射介质中的微小改变将导致波速的微弱变化, 主要表现为尾波信号在扰动前后的相位偏移. 图1显示了微小结构变化发生前后的多散射介质中某处记录的波形信号, 插图显示了直达波(图1(a))和尾波(图1(b))波形的详细信息. 不难看出, 直达波于扰动前后在幅值和相位上几乎没有变化, 而尾波则表现出明显的走时延迟, 该时延即为尾波对于介质中微弱变化多次采样后的体现, 是直达波所不能包含的物理信息. 图 1 多散射介质中扰动前后波形的比较 (a) 直达波扰动前后的波形; (b)尾波扰动前后的波形 Figure1. Comparison between typical time traces of a wave propagating in a multiple scattering medium before and after a small perturbation: (a) The first arrival waves before and after a small perturbation; (b) the coda waves before and after a small perturbation.
式中, $\left| {{s_1} - {s_2}} \right|$表示${s_1}$和${s_2}$之间的距离; D为介质的散射系数, 与其物理性质有关. 通过激励源与接收点的位置和尾波的传播时间, 对介质空间逐点计算$K({s_1},{s_2},{x_0},t)$, 即可得到敏感核的空间分布. 图2所示为尾波观察时间t分别为1 s和5 s, 散射系数为${\rm{5}}{\rm{.8}} \times {\rm{1}}{{\rm{0}}^5}\;{{\rm{m}}^2}/{\rm{s}}$, 激励源(S)与接收点(R)间距5000 m时的敏感核空间分布图. 从图2中可以看出, 敏感核在三维空间上呈马鞍形分布, 在激励点和接收点处达到峰值, 敏感核的值随着与这两点的距离增大而降低, 敏感核的空间分布也随着尾波观察时间的增加而展宽. t = 1 s时, 以直达波和单散射波为主, 对介质的采样密度和范围较小, t = 5 s时, 以多次散射产生的尾波为主, 对介质进行密集采样的同时增加了探测范围. 图 2 基于扩散近似的二维敏感核示例 (a) t = 1 s时的敏感核空间分布; (b) t = 5 s时的敏感核空间分布; (c) t = 1 s时的敏感核俯视图; (d) t = 5 s时的敏感核俯视图 Figure2. Examples of sensitivity kernel based on the diffusion approximation in 2-D: (a) Spatial representation of the sensitivity kernel when t = 1 s; (b) spatial representation of the sensitivity kernel when t = 5 s; (c) vertical view of the sensitivity kernel when t = 1 s; (d) vertical view of the sensitivity kernel when t = 5 s.
式中, nx, ny分别为划分在x, y方向的网格个数; nt为时间间隔个数; $\Delta h,\Delta t$分别为空间、时间网格上的划分步长, $\Delta h = 50\;{\rm{ m}}$, $\Delta t = 0.001\;{\rm{ s}}$; ${p^k}(i,j)$表示第k次(对应的时间)迭代时在$(i,j)$处的位移. 为了模拟相对无限大的传播空间, 本文仿真的速度场边界设置为吸收边界, 采用Clayton_Engquist_majda吸收边界算法, 反射率约为2.5%, 满足本研究的要求[27]. 下面基于以上仿真环境, 根据第2和第3节的原理, 给出针对五个速度扰动算例的线性最小二乘差分成像方法和本文成像方法的性能比较. 其中, 速度扰动的空间分布通过将介质剖分为$20 \times 20$的网格来离散表达, 则有400个待反演的未知量, 网格单元边长为500 m; 选择尾波观察时段为1.5—4.7 s, 每段窗口长度为0.5 s, 重叠0.2 s, 每个接收点可以获取扰动前后各10段尾波数据, 36对收发对即可计算得到360个时延数据; 敏感核的构造中散射系数$D = 8 \times {10^4}\;{\rm{ }}{{\rm{m}}^2}/{\rm{s}}$; 线性最小二乘差分方法中的相对长度$\lambda = 750\;{\rm{ m}}$. 对于单点扰动, 通过算例1和算例2进行了两种算法的成像对比, 如图5和图6所示. 其中, 算例1在速度场的左下方(具体位置见图5蓝色方框)施加一个大小为+0.5%, 面积为$1\;{\rm{km}} \times {\rm{2}}\;{\rm{km}}$的速度扰动区域; 算例2在图6右上方蓝色方框区域添加一个大小为+0.5%, 面积为${\rm{2}}\;{\rm{km}} \times {\rm{2}}\;{\rm{km}}$的速度波动. 图 5 算例1 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure5. Case 1: (a) Inversion image of linear least squares method; (b) inversion image of the method in this paper.
图 6 算例2 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure6. Case 2: (a) Inversion image of linear least squares method; (b) inversion image of the method in this paper.
图5(a)和图6(a)分别为算例1和算例2利用线性最小二乘差分方法迭代10次的结果, 通过L曲线法获取的${\sigma _m}$分别为0.00328和0.00266, 图5(b)和图6(b)分别为算例1和算例2在压缩感知理论框架下利用OMP算法迭代5次和7次的结果. 从算例1的结果可以看出, 两种算法均能准确地突显出扰动的位置, 而在扰动范围的确定方面本文方法更为接近真实值; 但从图6中可以清晰地看出, 线性最小二乘方法反演出的算例2扰动区域与真实设置相距甚远, 而本文方法依然能得到较好的反演结果. 可见, 本文方法在单扰动情况下较线性最小二乘法有更高的精确性与稳定性. 图7展示了实测数据的处理结果. 该实验是一个小型的模拟实验, 利用激振器发出前述雷克子波, 作为对$1.5\;{\rm{m}} \times {\rm{1}}.{\rm{2}}\;{\rm{m}}$的石膏板小样品的激励信号, 通过石膏板上布设的五个加速度传感器采集微小扰动发生前后的波形信号. 石膏板的波速与石膏板的含水率有关, 含水率增加, 板中超声波传播速度相应减小, 因此, 本实验采用加湿的方式对样品介质添加扰动. 图 7 实验数据处理结果 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure7. The results of experimental data processing: (a) Inversion image of linear least squares method; (b)inversion image of the method in this paper.
将石膏板剖分为$10 \times 10$的网格, 则待反演量的个数为100, 网格单元长宽分别为0.15 m和0.12 m, 在石膏板的中心位置加水以增加中心点处的含水率作为局部扰动; 尾波分析时段为0.2—2.8 s, 窗口长度均为0.6 s, 重叠0.4 s, 共11段尾波数据, 则可获得$5 \times 11 = 55$个时延数据; 敏感核构造中的散射系数$D = 140\;{{\rm{m}}^2}/{\rm{s}}$; 线性最小二乘法中的相对长度$\lambda = 0.1\;{\rm{ m}}$, 网格间距${\lambda _0}$取$\sqrt {0.15 \times 0.12} \approx $0.134 m. 在该模拟实验中, 仅仅对板的中心处进行了加湿, 扰动的空间分布已足够稀疏, 因此在使用稀疏重构方法时, 可以直接求解(6)式的最小${l_1}$范数, 而无需进行稀疏变换, 图7(b)即为稀疏重构法的成像结果, 图7(a)为线性最小二乘法的迭代结果, L曲线法求得${\sigma _m}$为0.33698. 对比7(a)和图7(b)可以看出, 两者对于扰动位置均有不错的定位效果, 但稀疏重构法的反演结果中, 扰动更为聚焦, 范围更接近于实际扰动的施加情况. 前面讨论了单点扰动算例, 并验证了所提方法的优越性能. 在实际中, 往往会出现多个扰动的情况, 因此算例3至5考虑了多个扰动区域的仿真, 图8—图10分别给出了两种算法反演结果的对比, 图中的蓝色方框和黄色方框分别表示在该区域内施加+0.5%和–0.5%的速度变化. 图 8 算例3 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure8. Case 3: (a) Inversion image of linear least squares method; (b) inversion image of the method in this paper.
图 10 算例5 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure10. Case 5: (a) Inversion image of linear least squares method; (b) inversion image of the method in this paper.
图8(a), 图9(a)和图10(a)分别是算例3, 4, 5用线性最小二乘法迭代10次的结果, L曲线法获取的${\sigma _m}$分别为0.01244, 0.00201和0.00208, 图8(b), 图9(b)和图10(b)分别为算例3, 4, 5用本文方法迭代5次、5次和4次的结果. 从图9和图10可以直观地看出, 本文方法对于多扰动区域的反演质量明显优于线性最小二乘法, 线性最小二乘法在算例4和算例5的结果中, 仅能定位出部分扰动, 且其位置与范围也有一定程度的偏离真值, 而本文方法对于设定的多扰动区域, 均能较为准确地反演出其位置与范围; 而从算例3的反演图像来看, 图8(a)确定的扰动区域与真值相差甚远, 甚至失去了参考价值, 相比之下, 图8(b)的结果更为接近真值, 有利于正确分析引起波速变化的物理机制. 图 9 算例4 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像 Figure9. Case 4: (a) Inversion image of linear least squares method; (b) inversion image of the method in this paper.

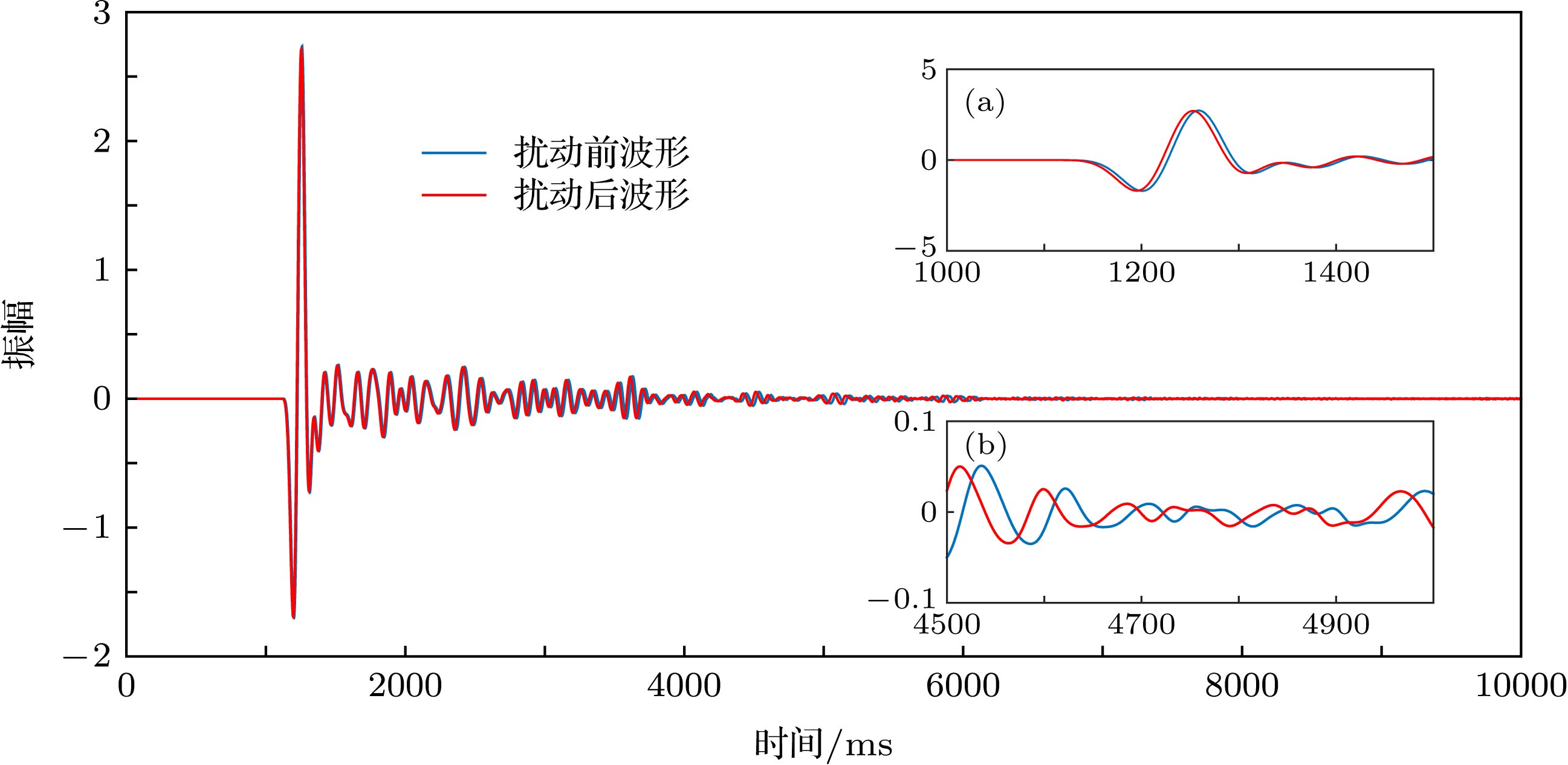 图 1 多散射介质中扰动前后波形的比较 (a) 直达波扰动前后的波形; (b)尾波扰动前后的波形
图 1 多散射介质中扰动前后波形的比较 (a) 直达波扰动前后的波形; (b)尾波扰动前后的波形























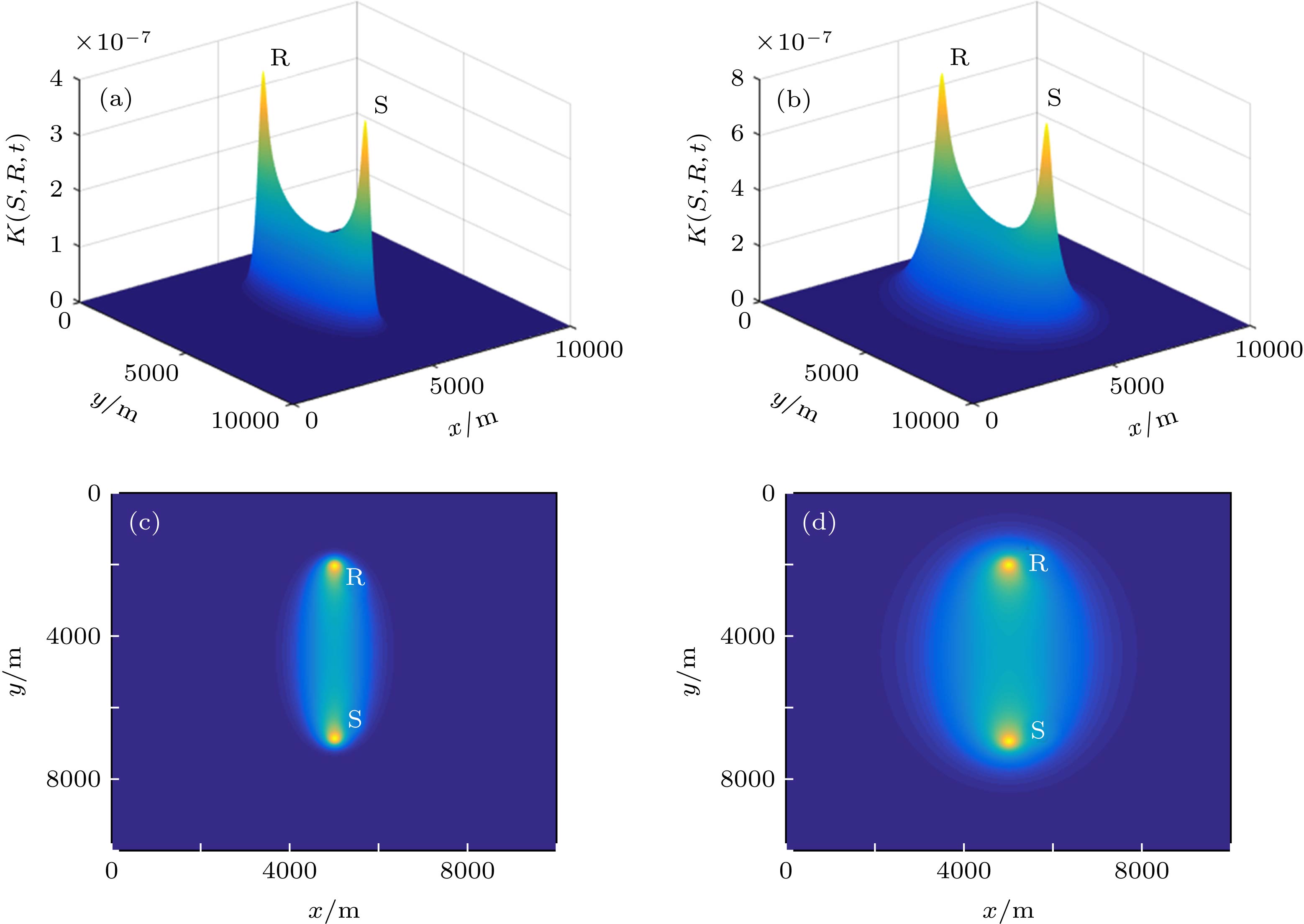 图 2 基于扩散近似的二维敏感核示例 (a) t = 1 s时的敏感核空间分布; (b) t = 5 s时的敏感核空间分布; (c) t = 1 s时的敏感核俯视图; (d) t = 5 s时的敏感核俯视图
图 2 基于扩散近似的二维敏感核示例 (a) t = 1 s时的敏感核空间分布; (b) t = 5 s时的敏感核空间分布; (c) t = 1 s时的敏感核俯视图; (d) t = 5 s时的敏感核俯视图




































































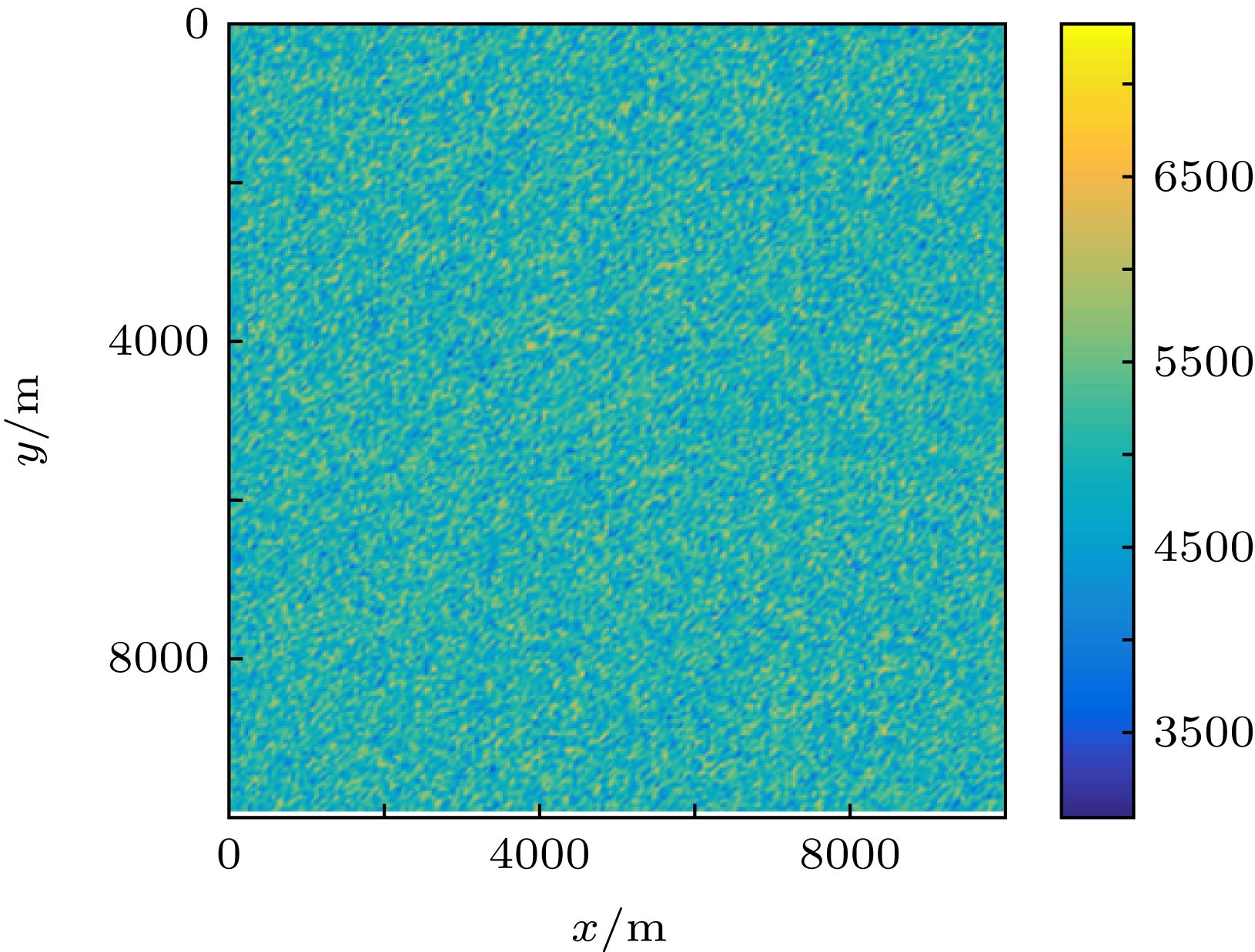 图 3 二维速度场模型
图 3 二维速度场模型 图 4 激励源及接收点布设
图 4 激励源及接收点布设













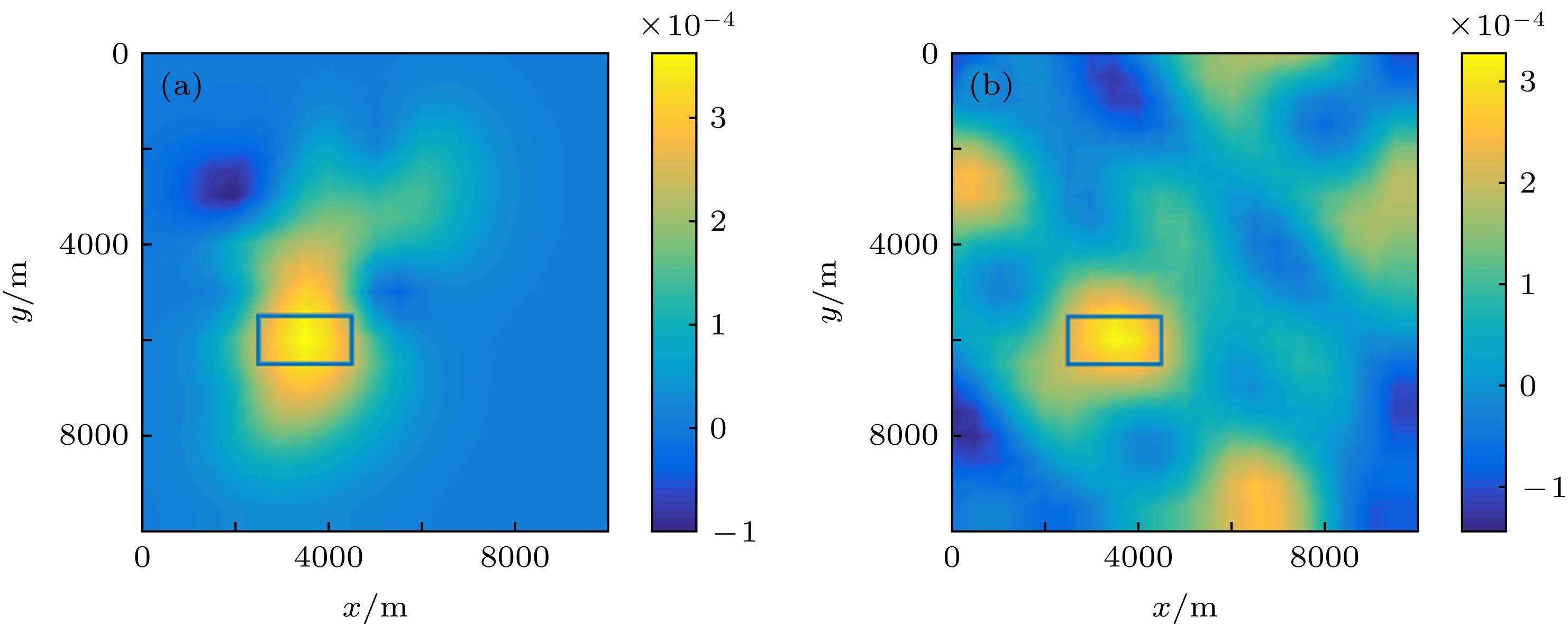 图 5 算例1 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 5 算例1 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像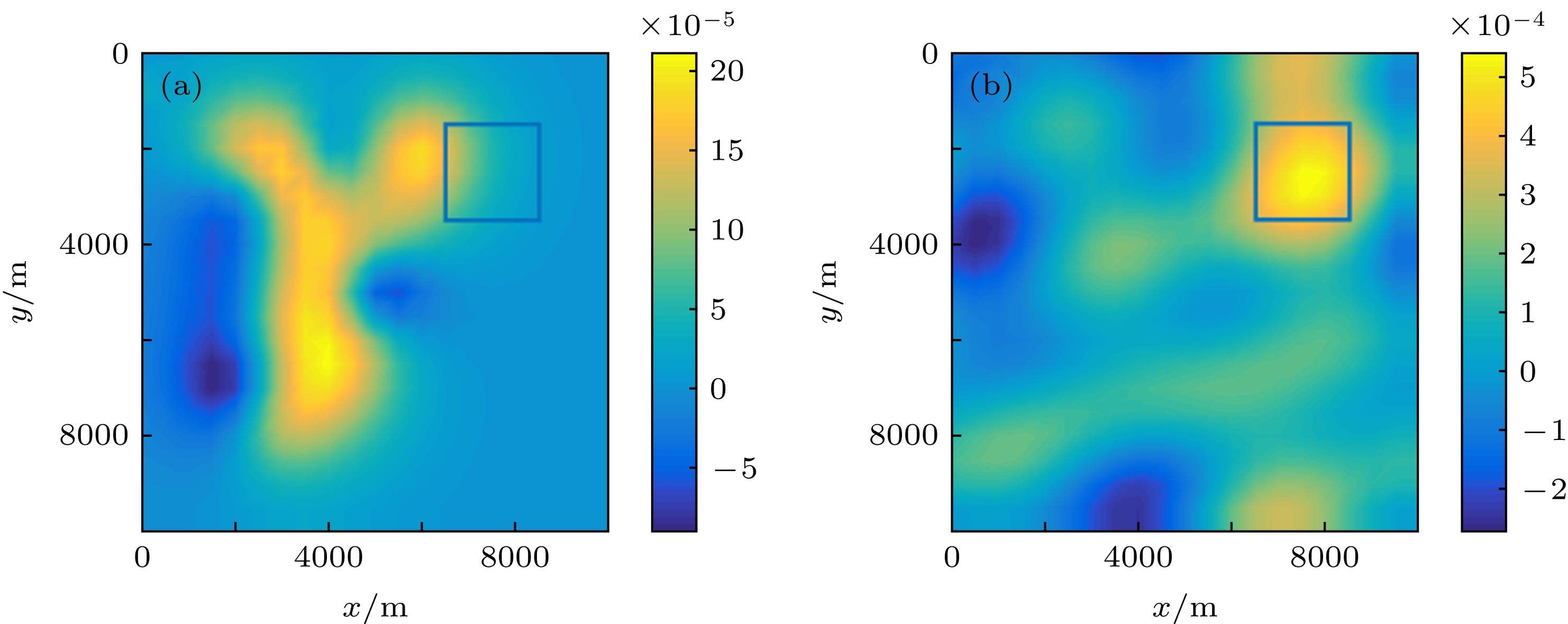 图 6 算例2 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 6 算例2 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像

 图 7 实验数据处理结果 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 7 实验数据处理结果 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像







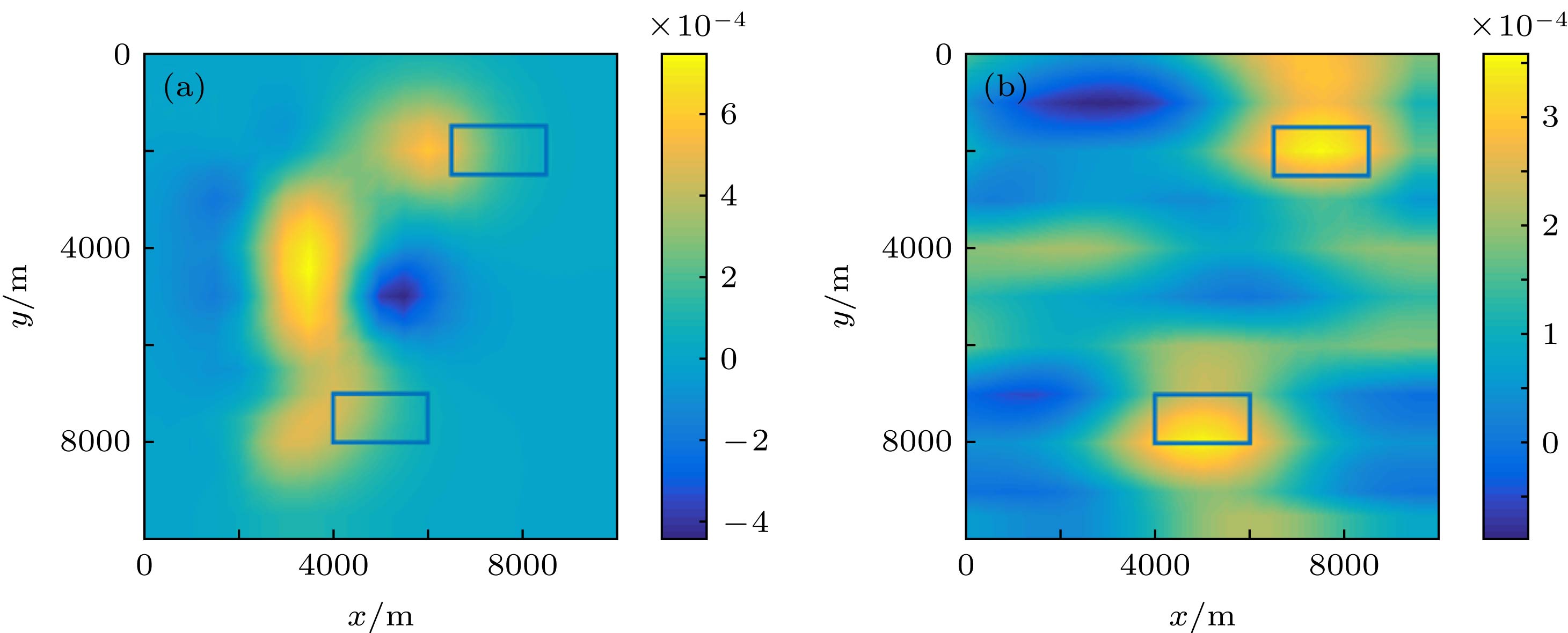 图 8 算例3 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 8 算例3 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像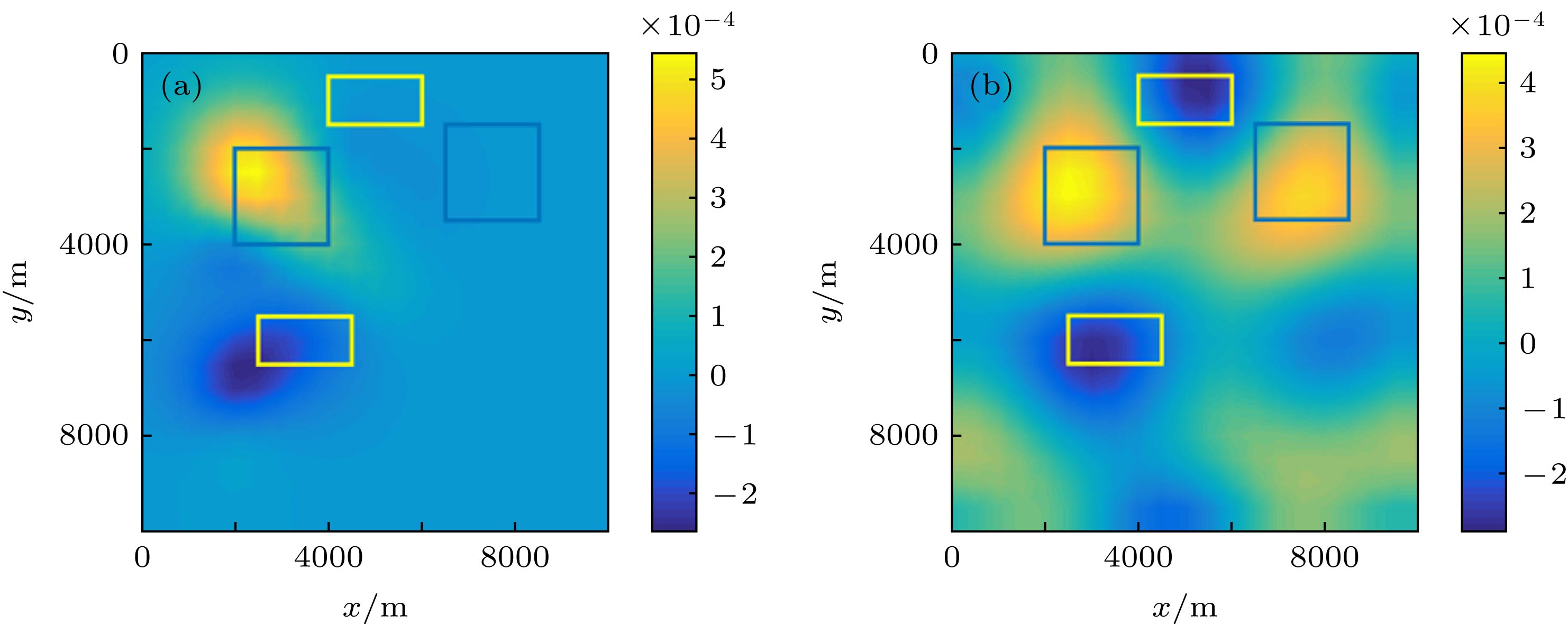 图 10 算例5 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 10 算例5 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
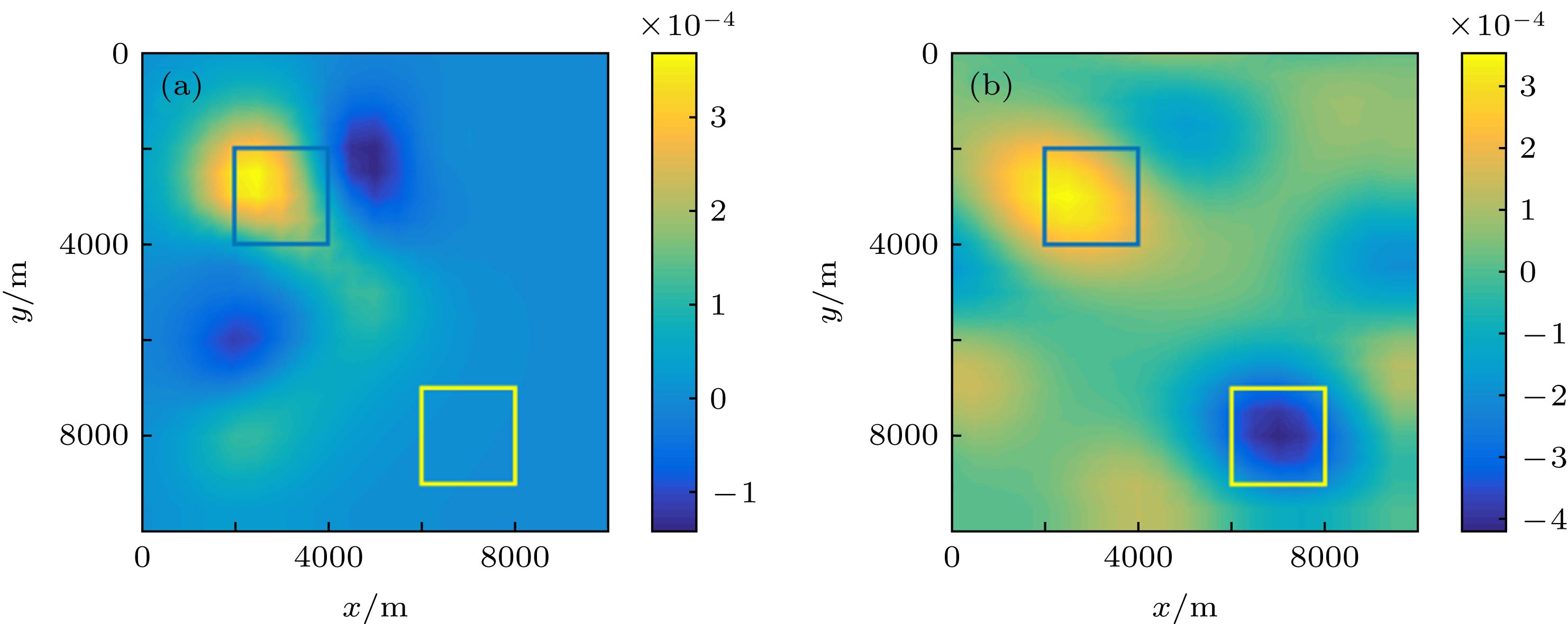 图 9 算例4 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
图 9 算例4 (a) 线性最小二乘法的反演图像; (b) 本文方法的反演图像
