1.Anhui Institute of Optics and Fine Mechanics,Chinese Academy of Sciences, Hefei 230031, China 2.University of Science and Technology of China, Hefei 230031, China 3.College of Electrical and Information enginenering, Anhui University of Science and Technology, Huainan 232001, China
Fund Project:Project supported by the National Key Research and Development Program of China (Grant Nos. 2016YFC0200400, 2017YFB0503901).
Received Date:27 February 2019
Accepted Date:06 May 2019
Available Online:01 August 2019
Published Online:20 August 2019
Abstract:In this paper, we present a novel method of computing tomography , i.e. the low third deviation total variation (LTD-TV) method to reconstruct the two-dimensional distribution of SO2 of stack plume. The path-integral data of the plume are collected by only two imaging differential absorption spectrometers (IDOASs). However, due to the insufficient number of IDOASs, conventional reconstruction methods result in severe streaking artifacts. The traditional low third derivative method is widely used to reconstruct the gas distribution. It suggests a spatial distribution of gas concentrations, which has a low third spatial derivative in every direction and at every point. The derivatives are usually set to be zero. The method improves the reconstructed images by providing extra information which contains the gas concentration in line with the distribution of the second order polynomial, but it also gives rise to the extra artifacts. To address this issue, we further improve the traditional low third deviation (LTD) method by suggesting that the third derivative of gas concentration is sparse. We therefore adopt the compressed sensing (CS) based total variation (TV) optimization framework. In the LTD-TV method, a logarithmic barrier function with TV is used as an objective function. The objective function is then optimized by numerical optimization method, in which the gradient projection is used to determine its descent direction and a Barzilai-Borwein scheme to determine its step-size. The final results are obtained by iterative optimization. Numerical simulations are performed to simulate the reconstruction of gas distribution which is in line with Gaussian distribution. Compared with the conventional LTD method, the LTD-TV method enhances the proximity by 20%—80%, and greatly corrects the artifacts near the edges of images. The result of field campaign suggests that concordance correlation factor between the collected data and reconstructed image is 0.9023. It also shows that it has good noise immunity. In summary, it is the first time that we have introduced the CS theory into the field of gas plume reconstruction. Compared with the existing methods, the LTD-TV method can greatly reduce the artifacts and increase the credibility of the reconstruction. Keywords:spectral absorption by atmospheric gases/ plume reconstruction/ low-third-deviation total variational method/ imaging differential optical absorption spectrometer
图2给出几幅用传统的LTD算法和LTD-TV算法重建气体分布的数值模拟等高线图. 图2(a)—图2(c)分别是单高斯、双高斯、三高斯气体扩散模型. 图 2 传统LTD法与LTD-TV法比较 (a), (b), (c)测试图形; (d), (e), (f)传统LTD法重建图形; (g), (h), (i) LTD-TV法20000次迭代重建图形 Figure2. Comparison between traditional LTD algorithm and LTD-TV algorithm: (a), (b), (c) Test distribution; (d), (e), (f) reconstruction of distribution using traditional LTD algorithm; (g), (h), (i) reconstruction of distribution using LTD-TV algorithm with 20000 iterations.





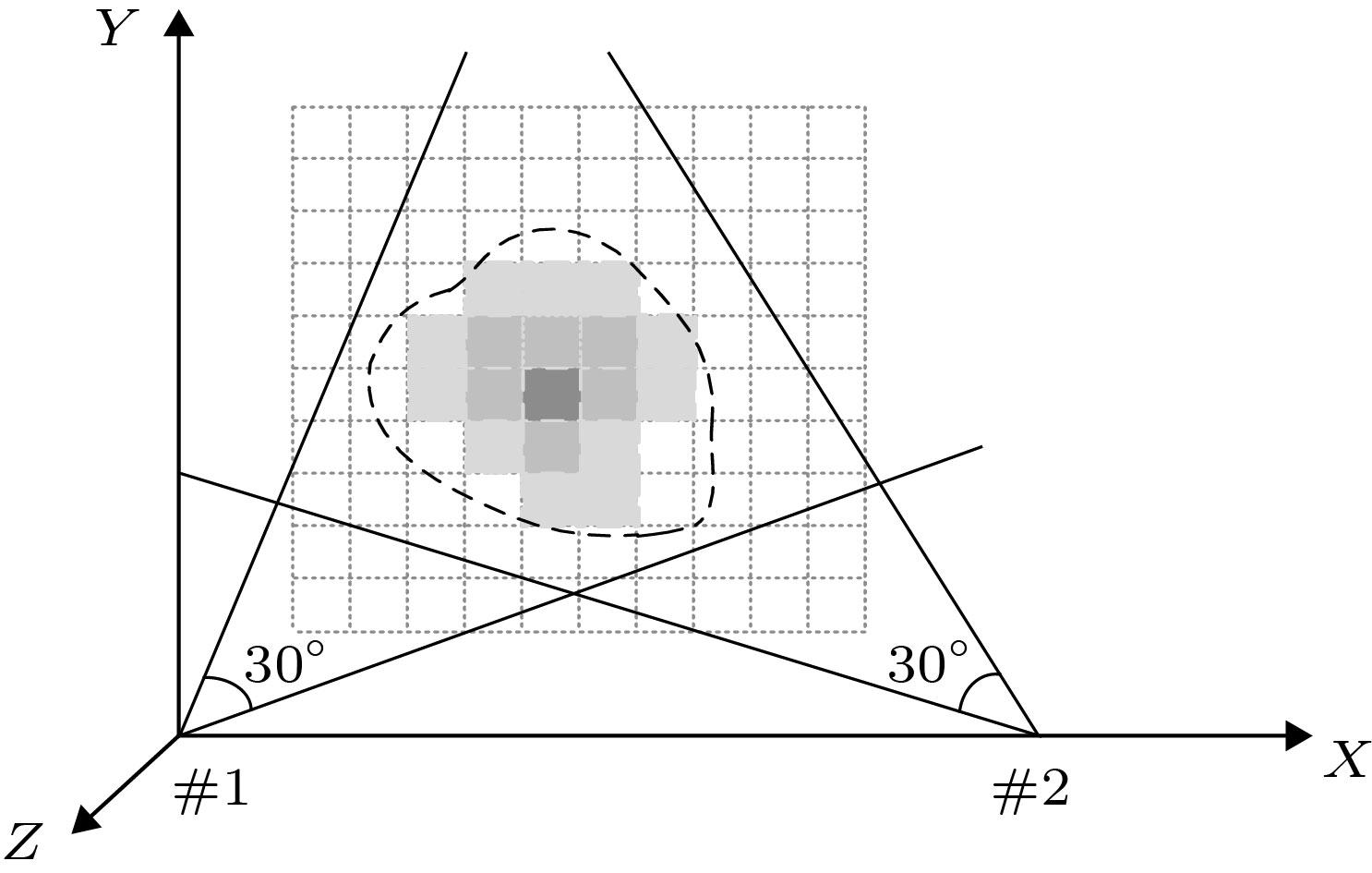 图 1 扫描区域离散化
图 1 扫描区域离散化
























 图 2 传统LTD法与LTD-TV法比较 (a), (b), (c)测试图形; (d), (e), (f)传统LTD法重建图形; (g), (h), (i) LTD-TV法20000次迭代重建图形
图 2 传统LTD法与LTD-TV法比较 (a), (b), (c)测试图形; (d), (e), (f)传统LTD法重建图形; (g), (h), (i) LTD-TV法20000次迭代重建图形



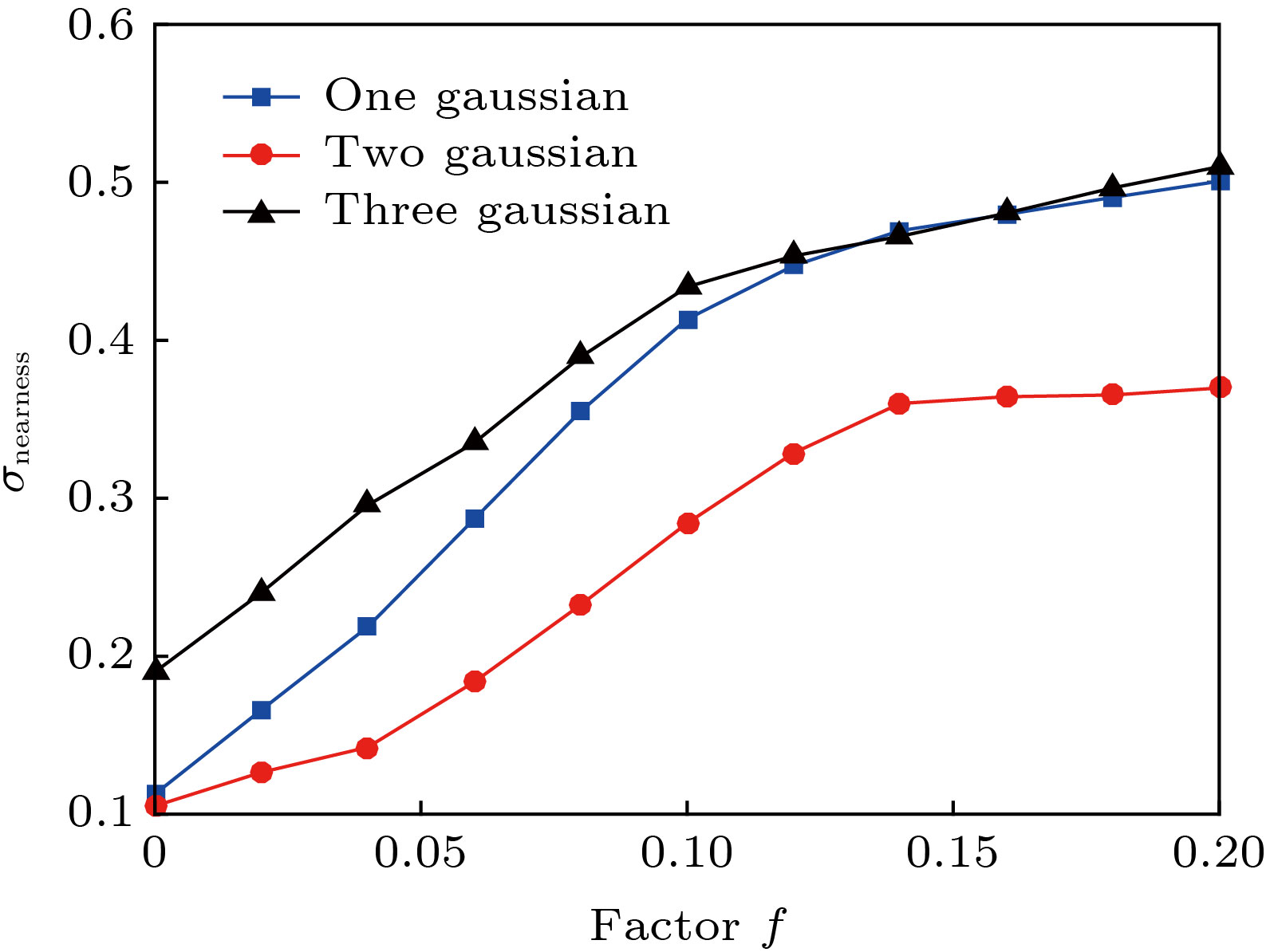 图 3 接近度随误差系数变化曲线
图 3 接近度随误差系数变化曲线 图 4 接近度偏离距离变化曲线
图 4 接近度偏离距离变化曲线 图 5 SO2柱浓度IDOAS拟合反演实例 (a) SO2柱浓度; (b)拟合残差
图 5 SO2柱浓度IDOAS拟合反演实例 (a) SO2柱浓度; (b)拟合残差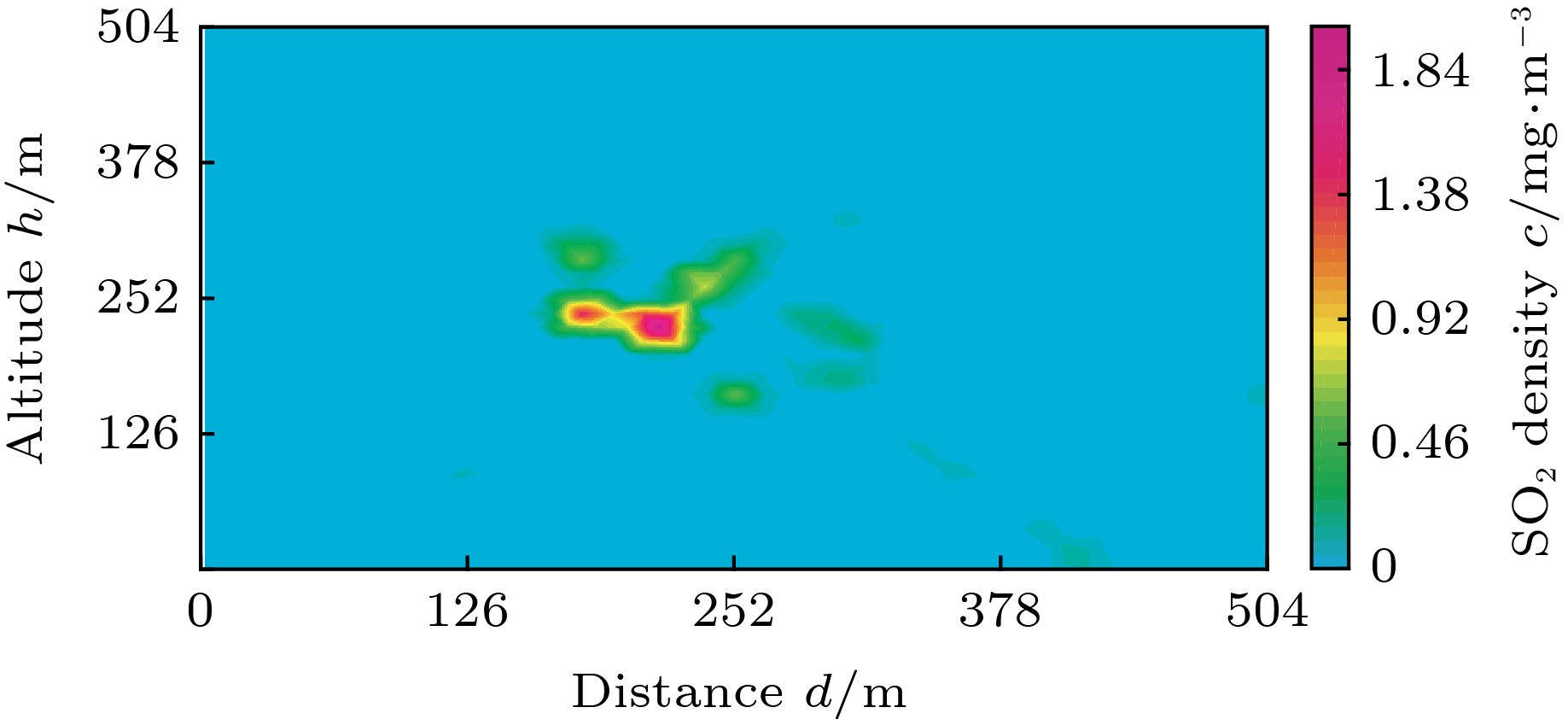 图 6 烟囱烟羽SO2分布重建图
图 6 烟囱烟羽SO2分布重建图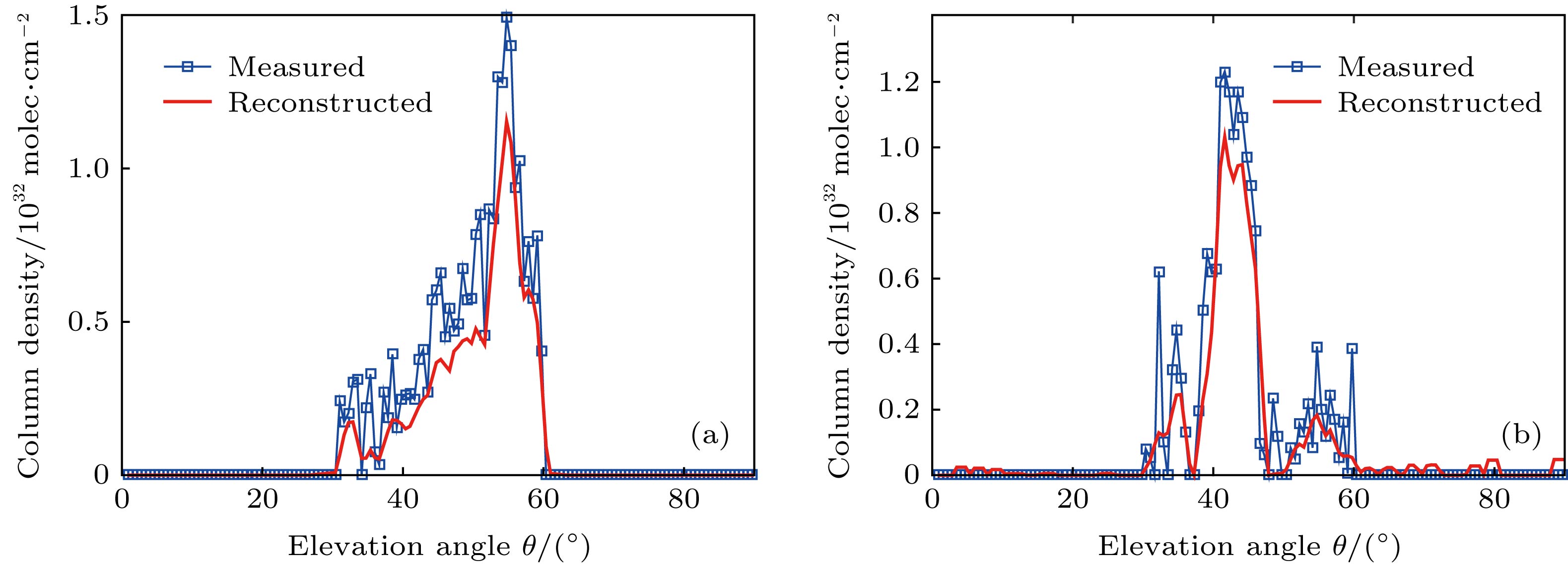 图 7 测量路径积分浓度与重建路径积分浓度对比 (a) IDOAS #1; (b) IDOAS #2
图 7 测量路径积分浓度与重建路径积分浓度对比 (a) IDOAS #1; (b) IDOAS #2




