摘要: 提出了一种基于交替起振的光电振荡器的大量程、高精度绝对距离测量方法. 此方法构建了两个光电振荡环路, 分别为测量环和参考环. 通过切换光开关实现测量/参考光电振荡器的交替起振; 通过切换微波开关实现光电振荡器高阶/低阶振荡模式的转换; 通过频率计依次记录测量/参考光电振荡器的高阶/低阶振荡频率, 然后计算测量/参考光电振荡器的腔长进一步得到绝对距离. 本方案的优点是: 由于采用了测量/参考两个光电振荡器腔长相减的方法消除系统自身的漂移, 不需要控制腔长, 结构简单. 实验中, 利用公里量级的光纤来模拟大量程的待测距离, 利用高步进精度的光延时线来模拟距离变化. 在等效6 km的空间往返待测距离上, 测量误差为3.5 μm, 相对测量精度达到5.8 × 10
–10 .
关键词: 激光测距 /
光电振荡器 /
绝对距离测量 English Abstract Long-range, high-precision absolute distance measurement technology based on alternately oscillating optoelectronic oscillator Xie Tian-Yuan Wang Ju Wang Zi-Xiong Ma Chuang Yu Yang Li Tian-Yu Fang Jie Yu Jin-Long School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China Fund Project: Project supported by the Special Fund for Basic Research on Scientific Instruments of the National Natural Science Foundation of China (Grant No. 61427817), and the National Natural Science Foundation of China (Grant Nos. 61775162, 61601321).Received Date: 25 February 2019Accepted Date: 30 April 2019Available Online: 01 July 2019Published Online: 05 July 2019Abstract: Absolute distance measurement plays an important role in many areas, such as aerospace and scientific research. Traditional measurement methods generally cannot meet requirements for long-range and high-precision at the same time. In this paper, an absolute distance measurement method based on alternately oscillating optoelectronic oscillator is proposed. This method places the distance to be measured in the loop of optoelectronic oscillator and takes advantage of accumulative magnification effect to achieve high accuracy. The measurement and the reference optoelectronic oscillators are established and selected by an optical switch, and a microwave switch is used to choose the high-order or low-order oscillating frequency. The high-order frequency and low-order oscillating frequency of the measurement and reference optoelectronic oscillators are measured in turn by frequency counter to calculate the loop lengths of two optoelectronic oscillators. The low-order frequencies are used to measure the fundamental frequency roughly and the high-order frequencies are used to calculate loop length precisely. Although the mode hopping occurs in the measurement process, it does not affect the loop length calculation by substituting the corresponding oscillating mode number. Note that the loop length measurement moments of two optoelectronic oscillators are different due to the switching order of optical switch and microwave switch. In order to calculate the absolute distance, which is the length difference between two optoelectronic oscillators at the same moment, the measured loop lengths should be averaged.In this way, systematic error accumulation caused by slow drift of environment can be eliminated, and this method does not need to control the length of reference optoelectronic oscillator. Meanwhile, the measurement system is simple. In the experiment, 1 km, 5 km and 8 km fibers are placed in a common part of the measurement and reference optoelectronic oscillators to simulate different long-range distances in space. A high-resolution optical delay line is placed in the measurement optoelectronic oscillator to verify the performance of the measurement system. The experimental results show that the measurement error is 3.5 μm with a 3.5 μm maximum standard deviation of each measurement distance at an emulated round trip distance of 6 km. The relative measurement accuracy reaches 5.8 × 10-10 . This method provides a feasible idea for solving the technical problems of long-range and high-precision absolute distance measurement.Keywords: laser distance measurement /optoelectronic oscillator /absolute distance measurement 全文HTML --> --> --> 1.引 言 大量程、高精度的绝对距离测量在工业制造、科学研究、航空航天等领域发挥了重要的作用, 如大型零件的装配、星间测距[1 —3 ] 等. 传统的绝对距离测量方法分为飞行时间法和干涉法. 飞行时间法是通过测量光往返经过待测距离的时间来测量距离, 适合长距离的测量, 但受到时间测量精度的限制, 测量分辨率限制在了毫米量级[4 ] . 干涉法(如多波长干涉法、扫频干涉法[5 —8 ] 等)是通过多个波长形成合成波长链并逐级精化, 或调频光经过目标反射与本振光拍频干涉, 可以实现纳米量级的距离测量, 但测量范围受到模糊距离的限制, 一般为几十米. 近年来, 通过采用光学频率梳技术, 进一步提高了测距的工作范围和测量精度[9 —14 ] . 如Lee等[10 ] 在2010年提出的基于飞秒光脉冲的飞行时间测距方法, 在大气条件下、0.7 km的待测距离上, 阿仑方差达到117 nm. Zhu等[13 ] 在2018年提出的基于合成波长双频梳干涉测距方法, 将飞行时间法、多波长干涉以及载波干涉法与频率梳相结合, 在1.5 m的长度上, 测量精度达到亚纳米量级. 从大的方面来看, 上述方法都是通过提高测量系统分辨率来提高测量精度, 对测试系统的要求较高, 其测量精度和测量范围的提高受到一定的限制: 如这些方法的高精度距离测量量程较短, 通常在百米量级[5 —14 ] .[15 ] : 其基本测量原理是将待测距离作为OEO腔长的一部分, 利用其振荡频率和腔长的变化关系来获得长度信息; 振荡器工作在高阶谐波振荡条件下, 实现积累放大; 光电振荡器的腔长一般在km量级, 可以实现大量程的高精度距离测量[15 ,16 ] . 但由于振荡频率反映的是整个振荡回路的腔长变化, 而整个振荡回路包含了待测的距离和振荡器固有的长度, 如何分离二者的变化从而得到真实的待测距离就成了该方法的技术难点. 在文献[15 ,16 ]中, 通过搭建两个OEO, 将待测距离置于其中一个OEO的环路中, 构成测量环路; 另一路和测量环路共用除待测距离外的振荡环路, 构成参考环路. 此时待测距离即为两个OEO腔长的差值. 实验结果表明此方案在等效距离为6 km范围内, 相对测量精度达到2.5 × 10–10 . 但需要指出的是此方案为了保证测量精度的准确性, 采用了锁相环控制光纤拉伸器的方法对参考环路进行腔长控制. 这需要多个拉伸量和精度不同的光纤拉伸器以及复杂的控制算法才能实现μm量级的控制精度, 从而增加了系统的复杂性, 限制了此方案的应用. 此外, 由于振荡器的特性, 此方案中测量环和参考环并非严格共用除测量长度外的所有振荡环路, 即两路腔长存在非公共部分. 这意味着即使锁定了参考环路, 测量环路中的非公共部分仍然存在慢漂, 造成误差. 为了摆脱腔长控制对整个测量系统的限制, 同时消除两腔非公共部分慢漂对测量系统的影响, 我们提出了基于交替起振光电振荡器的绝对距离测量方法.–10 .2.方案的理论分析 基于交替起振光电振荡器的绝对距离测量系统框图如图1 所示. 激光器、强度调制器、光开关、长光纤、光电探测器、放大器、微波开关、滤波器、电耦合器等构成了基本光电谐振腔. 其中, 激光器波长为1550 nm, 输出功率100 mW; 强度调制器的带宽为20 GHz; 光开关是2 × 2高速磁光开关, 切换速度为30 μs, 在实验中用于两个振荡环的切换; 光延时线的量程为330 ps, 最小步进为0.3 μm(General Photonics公司的MDL-002), 主要用于模拟待测距离变化, 验证测量精度; 长光纤为5 km普通单模光纤; 光电探测器的带宽为30 GHz; 微波开关为DC-20 GHz单刀双掷微波开关, 用于改变振荡器的振荡频率; 带通滤波器的中心频率为9.9 GHz, 带宽10 MHz; 低通滤波器带宽为100 MHz; 微波移相器为机械式微波移相器; 40 kHz—38 GHz宽带的微波放大器(SHF 806E)用于放大高频和低频信号. 光延时线置于光开关IN2端口和OUT2端口之间作为待测距离. 当光开关处于交叉状态时, 光延时线接入OEO环路, 与其他部分构成测量环, 定义为OEO1, 如图1(a) 所示; 当光开关处于平行状态时, 构成参考环, 定义为OEO2, 如图1(b) 所示. 通过切换光开关可以实现OEO1与OEO2间的切换. 带通滤波器置于电耦合器1的A端口和微波开关的A端口, 低通滤波器和移相器置于电耦合器1的B端口和微波开关的B端口. 通过微波开关在A, B端口切换可以实现高阶模式和低阶模式起振频率的切换.图 1 基于交替起振光电振荡器绝对距离测量的基本结构 (a)光开关处于交叉状态, 测量环振荡; (b)光开关处于平行状态, 参考环振荡Figure1. Basic structure of absolute distance measurement method based on alternately oscillating OEO: (a) The measurement loop oscillates with optical switch at cross state; (b) the reference loop oscillates with optical switch at parallel state.[17 ] , 其基频f b 与OEO的腔长L 的关系为c 为真空中光速, n 为光在介质中的折射率(在光纤中, n ≈ 1.5). 通常, OEO在高阶模式上起振, 起振频率f hm 在几GHz至几十GHz, 由OEO中窄带滤波器的中心频率决定. f hm 与f b 的关系为f hm = N hm ·f b , 其中N hm 为高阶振荡模式数(N hm 为整数). 根据积累放大原理[15 ,16 ] , 我们可以通过测量OEO的高阶振荡频率f hm 和振荡模式数N hm 来反推出精确的f b , 实现大量程、高精度的长度测量. 以我们的实验条件为例: 光纤长度5 km, 光纤折射率n = 1.5的条件下, 起振频率f hm 在9.9 GHz附近, 线宽可达mHz量级[18 ] . 此时基频f b 约为40 kHz, N hm 约为2.475 × 105 . f hm 只需测到Hz量级, 频率测量就达到10–10 的精度, 根据正确的N hm 值反推出f b 也在10–10 量级. 因此, 测量精度取决于f hm 的测量准确性和N hm 值的正确性.N hm 为整数, N hm 通过粗测基频f b * 来得到, N hm 通过下式计算:f b * 为相邻起振模式的频率间隔. 在保证N hm 的正确性条件下, f b * 测量值的范围应满足$\dfrac{{{f_{{\rm{hm}}}}}}{{{N_{{\rm{hm}}}} + 0.5}} <f_{\rm{b}}^* <$ $ \dfrac{{{f_{{\rm{hm}}}}}}{{{N_{{\rm{hm}}}} - 0.5}}$ , 即f b * 测量精度要求在$ \pm \dfrac{{{f_{{\rm{hm}}}}}}{{2N_{{\rm{hm}}}^2}}$ 内. 在我们的实验条件下, 此f b * 的精度要求在 ± 0.08 Hz以内. 在高阶模式起振时(9.9 GHz), 频率计对f hm 的测量精度在Hz量级, 无法直接得到符合精度要求的f b * . 这时, 需要降低起振频率, 以提高频率的测量精度. 方案中我们设置了微波开关, 通过切换到B端口选择低通滤波器, 就可以让OEO在低阶模式上振荡. 当振荡频率f lm 低于100 MHz, 频率计的测量精度很容易达到0.01 Hz, 满足对基频进行粗测的要求. 低阶模式振荡频率f lm 满足f lm = N lm ·f b 关系, N lm 为低阶振荡模式数(N lm 为整数). 由于OEO每次在低阶频率起振时, 其可能在通带内的任意模式上起振, 起振模式间的频率差为谐振腔基频f b 的整数倍, 最小频率间隔即为f b . 连续测量起振频率可以得到一系列频率差Δf lm i f lm i kHz 定义为Δf lm i f lm i kHz 的最大公约数定义为f GCD . 该最大公约数即为精确到kHz的最小跳频间隔. 则各频率差对应的模式间隔数ΔN lm i N lm i f lm i kHz /f GCD . 因此各测量时刻的基频f 'b 表示为f 'b = Δf lm i N lm i f 'b 与f b 并不严格相等. 但只要两次测量的腔长变化在$\Delta L =$ $ \dfrac{{c{N_{{\rm{hm}}}}}}{{n{f_{{\rm{hm}}}}}} - \dfrac{{c({N_{{\rm{hm}}}} \pm 0.5)}}{{n{f_{{\rm{hm}}}}}} = \pm \dfrac{c}{{2n{f_{{\rm{hm}}}}}}$ 以内, 计算得到的N hm 的正确性就不会受到影响. 在我们的实验条件下, 腔长差应保证在 ± 10 mm以内. 在温度变化不大、测量时间较短的情况下是很容易达到的. 根据f 'b 与f lm N lm , 进而得到粗略测量的f b * . N lm 和f b * 分别用(3 )和(4 )式计算得到:f b * 可以直接代入高阶模式时的f b * , 两部分电路的长度差也要控制在 ± 10 mm以内. 这可以利用矢量网络分析仪测量并调整微波移相器实现.L 的计算公式如下:f hm1 , N hm1 和f lm1 , N lm1 ; OEO2在高阶和低阶模式起振的频率和振荡模式数分别为f hm2 , N hm2 和f lm2 , N lm2 . 光开关所处状态和微波开关的切换顺序以及f hm1 , f lm1 , f hm2 , f lm2 的测量顺序如图2(a) 所示. 在t 1 i t 2 i t 3 i t 4 i t 1 i +1t 2 i +1t 3 i +1t 4 i +1t 1 i t 3 i t 1 i +1t 3 i +1f hm1 i f lm1 i f hm2 i f lm2 i f hm1 i +1f lm1 i +if hm2 i +1f lm2 i +15 )式, 对应的OEO1和OEO2的腔长依次为L 1 i , L 2 i , L 1 i +1L 2 i +1图2(b) 所示.图 2 距离测量过程 (a)光开关、微波开关切换时刻及相应的频率测量; (b) OEO1和OEO2的腔长测量及绝对距离测量Figure2. Distance measurement process: (a) The switching moments of optical switch and microwave switch and corresponding frequency measurement process; (b) loop length measurement of OEO1, OEO2 and the absolute distance measurement.t 3 i L 1 i L 1 i +1$L_{1 - {\rm{avg}}}^i = \dfrac{{L_1^i + L_1^{i + 1}}}{2}$ , 此时, OEO2的腔长为L 2 i t 3 i D 2 i t 1 i +1D 1 i +1图2(b) 所示.3.实验系统及测量结果 在实验中, 首先采用了5 km的光纤(等效于7.5 km的空间距离)进行测试. 频率计测量一次过程如图3 所示. 0—25 ms, 光开关处于交叉状态、微波开关切换到A位置, OEO1在高阶模式起振; 25—125 ms, 频率计记录f hm1 ; 125—150 ms, 光开关处于交叉状态、微波开关切换到B位置, OEO1在低阶模式起振; 150—250 ms, 频率计记录f lm1 ; 250—275 ms, 光开关处于平行状态、微波开关切换到A位置, OEO2在高阶模式起振; 275—375 ms, 频率计记录f hm2 ; 375—400 ms, 光开关处于平行状态、微波开关切换到B位置, OEO2在低阶模式起振; 400—500 ms, 频率计记录f lm2 .图 3 开关切换及频率计计数时序图Figure3. The switching time and frequency counting timing diagram.图4(a) 和图4(b) 所示. 电谱仪(Agilent 8564 EC)的频宽(SPAN)设置为200 kHz, 带宽分辨力(RBW)设置为3 kHz. 从图4(a) 和图4(b) 可以看出, OEO产生的微波信号边模约为40 kHz, 且测量/参考环在高阶/低阶模式振荡时, 边模抑制比均大于40 dB. 虽然没有文献[15 ]中采用双环光电振荡器结构的边模抑制比高, 但40 dB的边模抑制比并不影响频率计的正常工作, 因此对系统的测量精度没有影响.图 4 测量/参考环振荡信号的频谱图 (a)高阶模式起振; (b)低阶模式起振Figure4. RF spectrum of oscillating frequencies of measurement/reference loop: (a) With OEO oscillating at high-order mode; (b) with OEO oscillating at low-order mode.–12 , 频率计的门控时间设置为100 ms. OEO起振在高阶和低阶模式时, 频率计的频率分辨率分别为1 Hz和0.01 Hz. 光延时线在0 mm位置时, 频率计连续测量10次, 结果如图5(a) 所示. OEO1和OEO2的高阶起振频率f hm1 和f hm2 分别用方形点和圆点表示, 可以看出, f hm1 和f hm2 起振在9.906 GHz附近, 测试过程中存在跳模现象, 分别跳变了7次和5次(如虚线所示). OEO1和OEO2的低阶起振频率f lm1 和f lm2 分别用三角形点和 × 形点表示, 可以看出, f lm1 和f lm2 起振在69 MHz附近, 且分别发生了7次和6次跳模(如虚线所示地). 经计算, 测量环的f GCD 为40 kHz, f lm1 在第3次和第4次测量时的跳模频率间隔为最小跳模间隔. 根据各测量时刻的频率差以及f GCD 可以得到各测量时刻的f 'b . 将f 'b 以及相应时刻测量的f lm1 代入(4 )式计算得到各测量时刻的f b1 * , 约为39818.14 Hz. 同理, 可以得到f b2 * 约为39831.73 Hz.图 5 长光纤为5 km光延时线在0 mm位置时的测量结果 (a) OEO1和OEO2起振频率测量值; (b) OEO1和OEO2的腔长及待测距离测量结果Figure5. Measurement results at 0 mm position of optical delay line with 5 km fiber: (a) Oscillating frequencies of OEO1 and OEO2; (b) loop lengths of OEO1 and OEO2, and distance measurement results.f b1 * 和f b2 * 代入(5 )式, 可以得到OEO1和OEO2的腔长, 并计算相邻腔长的平均值. 如图5(b) 所示, OEO1和OEO2的腔长分别用方形点和圆点表示, 相邻腔长的平均值分别用三角形点和 × 形点表示. 待测距离为对应时刻OEO1和OEO2腔长的差值, 用空心圆表示. 可以看出, OEO1和OEO2的腔长在测量过程中分别从7529.011341 m和7526.458857 m逐渐减小为7529.011177 m和7526.458690 m; 而待测距离趋于定值, 平均值为2.552476 m, 标准差为2.7 μm.图6 所示. 光延时线位移距离与测距结果用方形点表示, 有很好的线性关系. 测距结果与光延时线各位移距离的误差用三角点表示, 误差线表示为每个测量距离的标准差. 可以看出, 在7.5 km的空间距离上, 在整个测量范围内误差为4.2 μm, 每个测量距离的标准差均小于4 μm, 相对测量精度为5.6 × 10–10 . 等效成实际应用的往返测量时, 就是测量范围为3.75 km, 误差与标准差相应减半, 相对测量精度不变.图 6 长光纤为5 km时测量距离与光延时线位移距离的关系Figure6. The relationship between measured distance and position variation of optical delay line with 5 km fiber.图7(a) 和图7(b) 所示. 通过分析可以得到, 等效往返待测距离0.75 km(1 km长光纤)时, 整个测量范围内误差为1 μm, 每个测量距离的标准差均小于1.8 μm, 相对测量精度为1.3 × 10–9 ; 等效往返待测距离6 km(8 km长光纤)时, 整个测量范围内误差为3.5 μm, 每个测量距离的标准差均小于3.5 μm, 相对测量精度达到5.8 × 10–10 .图 7 测量距离与光延时线位移距离的关系 (a) 1 km长光纤; (b) 8 km长光纤Figure7. The relationship between measured distance and position variation of optical delay line: (a) With 1 km fiber; (b) with 8 km fiber.4.结 论 本文提出了一种基于交替起振光电振荡器的大量程、高精度绝对距离测量方法. 实验采用了测量、参考光电振荡环交替起振、测量的方法. 从而有效消除了光电振荡器自身漂移对测量带来的不利影响. 在保持了OEO测距的大量程、高精度优点的同时, 不需要对OEO的腔长进行控制, 大大简化了系统, 扩展了系统的可用性. 实验结果表明: 在等效6 km的空间往返待测距离上, 测量误差为3.5 μm, 每个测量距离的标准差小于3.5 μm, 相对测量精度达到5.8 × 10–10 . 此方法为解决大量程、高精度绝对距离测量技术难题提供了一种可行的思路.  图 1 基于交替起振光电振荡器绝对距离测量的基本结构 (a)光开关处于交叉状态, 测量环振荡; (b)光开关处于平行状态, 参考环振荡
图 1 基于交替起振光电振荡器绝对距离测量的基本结构 (a)光开关处于交叉状态, 测量环振荡; (b)光开关处于平行状态, 参考环振荡




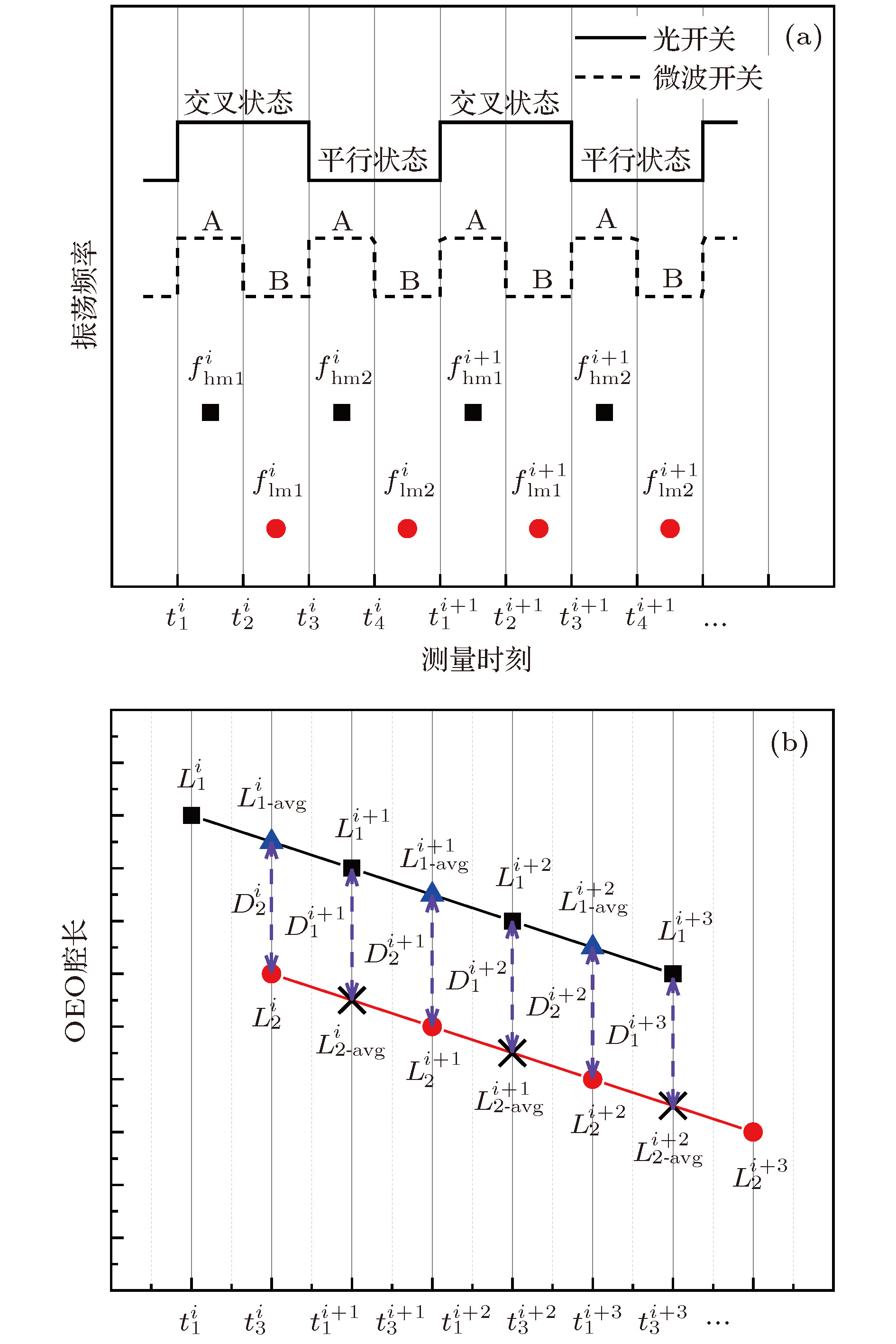 图 2 距离测量过程 (a)光开关、微波开关切换时刻及相应的频率测量; (b) OEO1和OEO2的腔长测量及绝对距离测量
图 2 距离测量过程 (a)光开关、微波开关切换时刻及相应的频率测量; (b) OEO1和OEO2的腔长测量及绝对距离测量
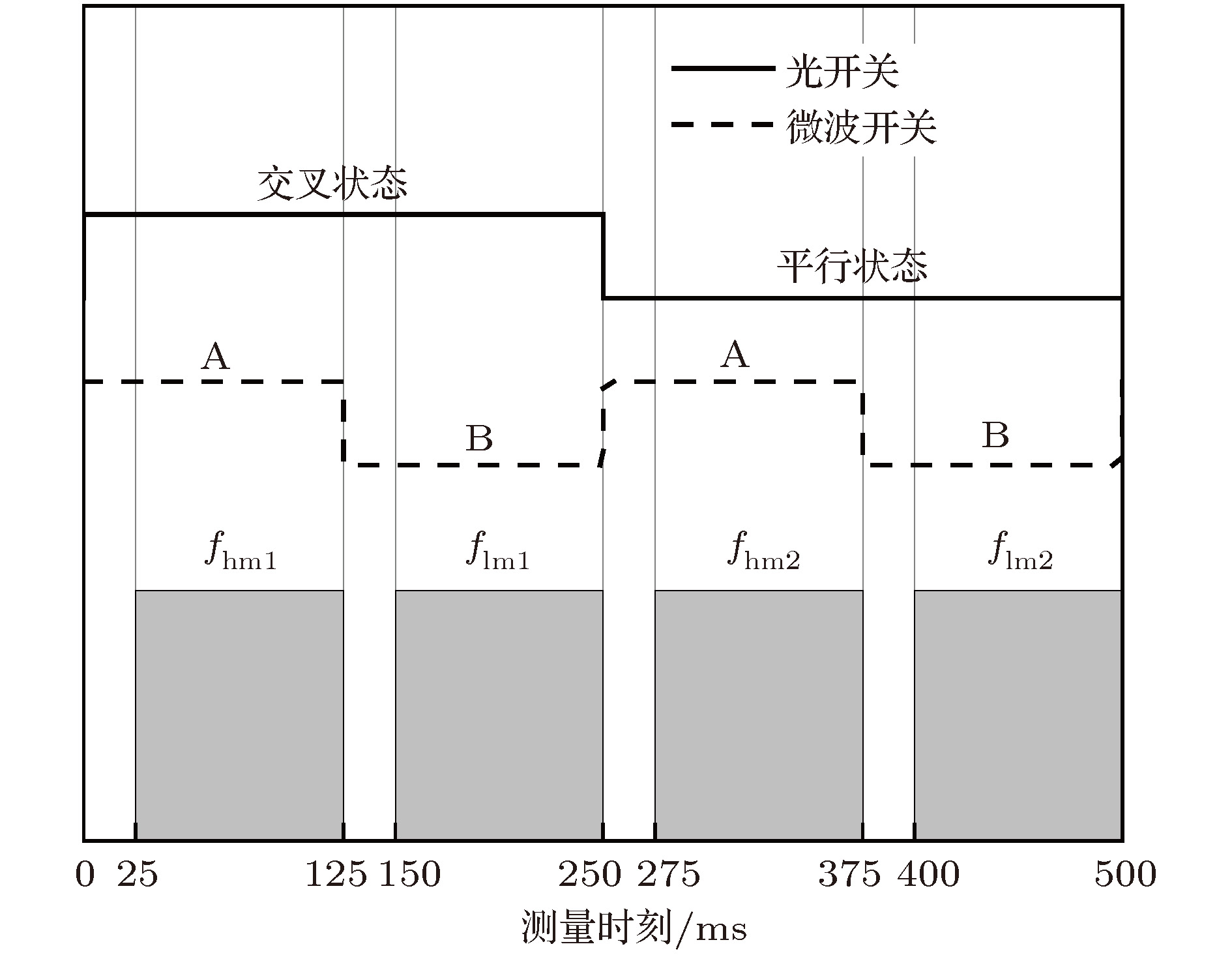 图 3 开关切换及频率计计数时序图
图 3 开关切换及频率计计数时序图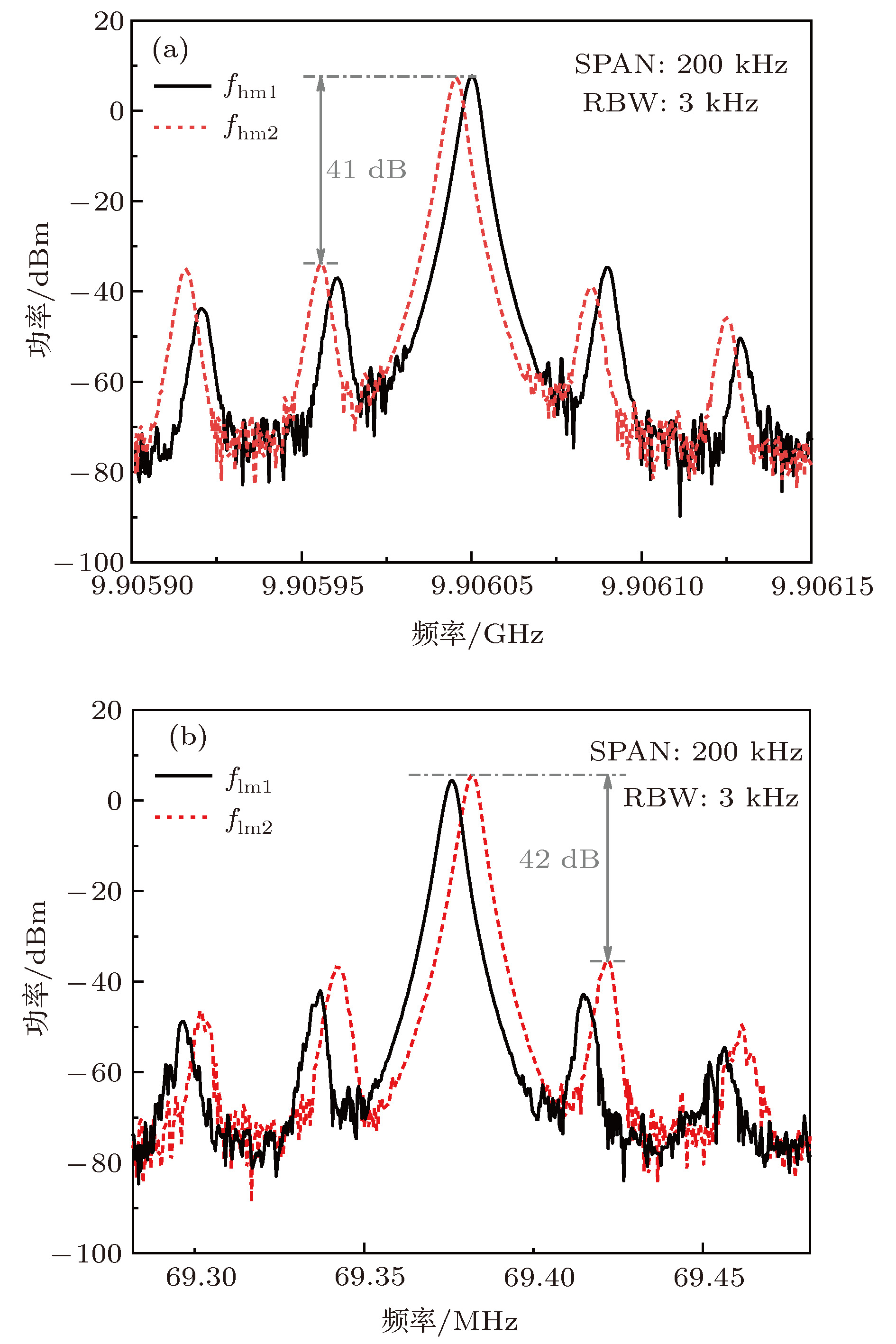 图 4 测量/参考环振荡信号的频谱图 (a)高阶模式起振; (b)低阶模式起振
图 4 测量/参考环振荡信号的频谱图 (a)高阶模式起振; (b)低阶模式起振 图 5 长光纤为5 km光延时线在0 mm位置时的测量结果 (a) OEO1和OEO2起振频率测量值; (b) OEO1和OEO2的腔长及待测距离测量结果
图 5 长光纤为5 km光延时线在0 mm位置时的测量结果 (a) OEO1和OEO2起振频率测量值; (b) OEO1和OEO2的腔长及待测距离测量结果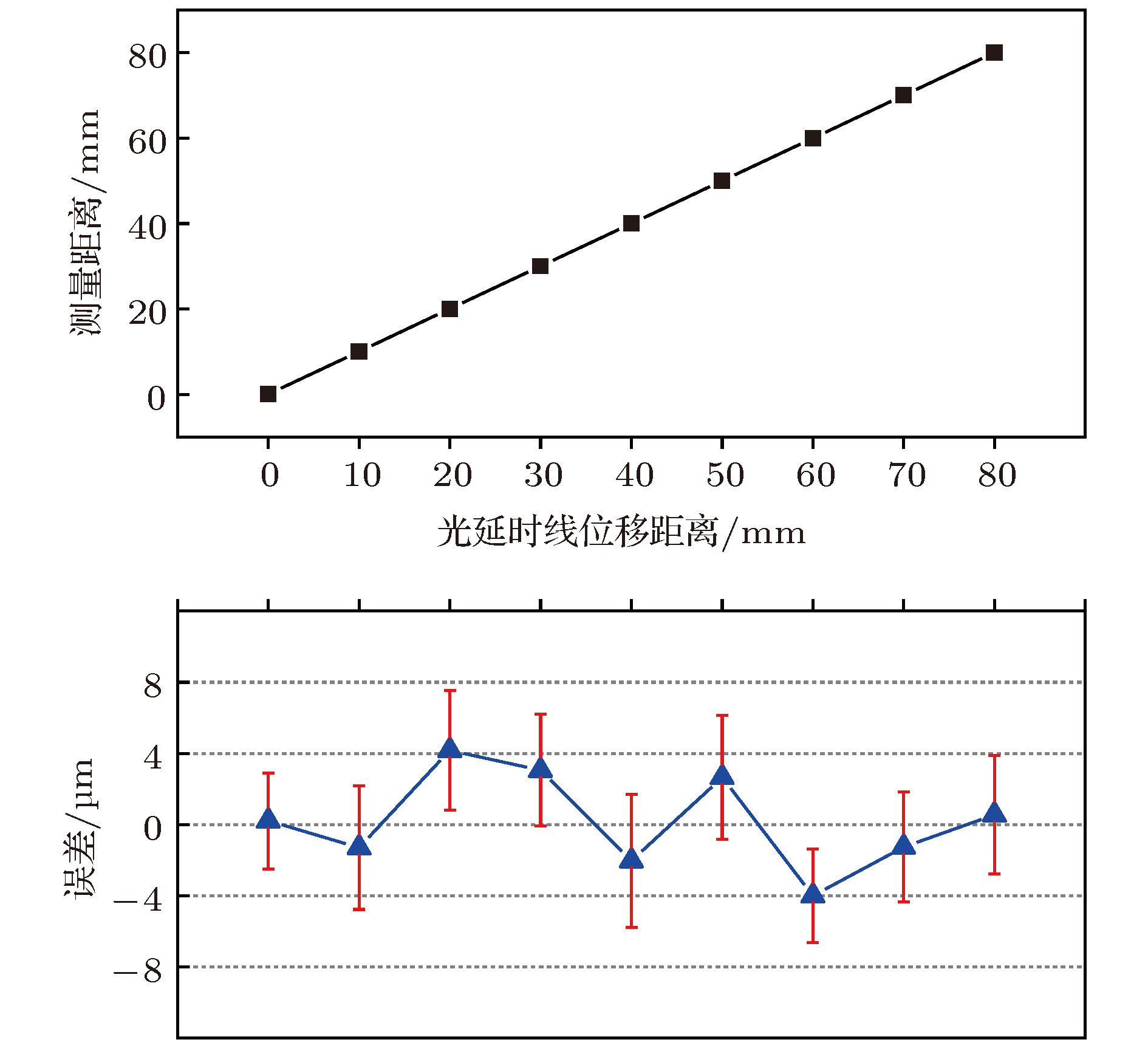 图 6 长光纤为5 km时测量距离与光延时线位移距离的关系
图 6 长光纤为5 km时测量距离与光延时线位移距离的关系 图 7 测量距离与光延时线位移距离的关系 (a) 1 km长光纤; (b) 8 km长光纤
图 7 测量距离与光延时线位移距离的关系 (a) 1 km长光纤; (b) 8 km长光纤