1.Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61501429).
Received Date:05 March 2019
Accepted Date:11 April 2019
Available Online:01 July 2019
Published Online:05 July 2019
Abstract:The traditional method of designing the initial configuration of off-axis reflective optical system is to first obtain the initial configuration of coaxial reflective optical system, and then achieve the unobscured design with an offset aperture stop or a biased input field, or both. Because the aberration distribution of coaxial reflective optical system is not applicable to the off-axis reflective optical system, the obtained unobscured off-axis reflective optical system has large aberration, and the unobscured design process is complicated. In this paper we present a method of designing an initial configuration of off-axis reflective optical system based on vector aberration theory. With this design method, a good unobscured initial configuration of off-axis reflective optical system can be directly obtained by using an offset aperture stop or a biased input field, or both. Based on the vector aberration theory and gaussian brackets, the third-order aberration coefficient is derived for off-axis reflective optical system. Initial configuration performance is important for optical design, especially for the complicated optical system design. The selection of initial configuration highly affects the final system imaging performance, fabrication difficulty and alignment difficulty. An error function is established to evaluate the performance of off-axis reflective optical system, and it consists of aberration coefficients and other constraints. The genetic algorithm is a highly parallel, random and adaptive global optimization algorithm. To obtain a good initial configuration for the off-axis reflective optical system, the genetic algorithm is used to search for the initial configuration with minimum residual aberration. This method can obtain a good initial configuration of off-axis reflective optical system for further optimization. The benefit of this design method is demonstrated by designing an off-axis three-mirror optical system. For the focal plane array, a long-wave infrared off-axis three-mirror optical system is designed. A good initial configuration is obtained with the proposed method, which achieves the unobscured design by using an offset aperture stop and a biased input field. To improve the performance of initial configuration, the obtained initial configuration is optimized with the optical design software. The designed optical system has good imaging quality. As the mirrors are free from the tilts and decenters, the designed optical system is aligned easily. Keywords:geometric optics/ off-axis reflective system/ vector aberration theory/ optical design
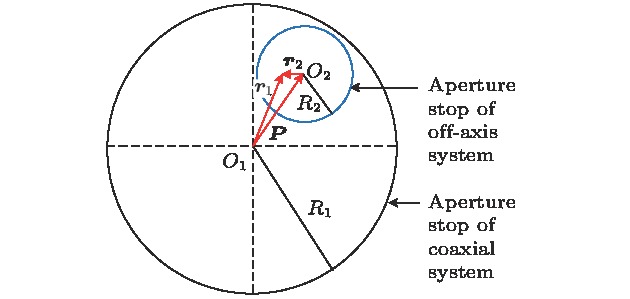 图 1 光瞳离轴光学系统示意图
图 1 光瞳离轴光学系统示意图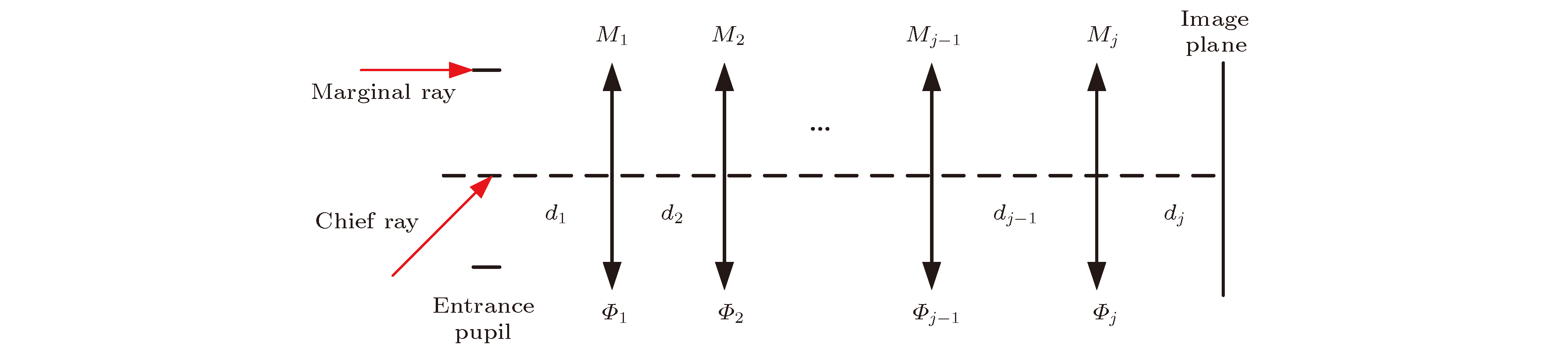 图 2 光线追迹模型
图 2 光线追迹模型



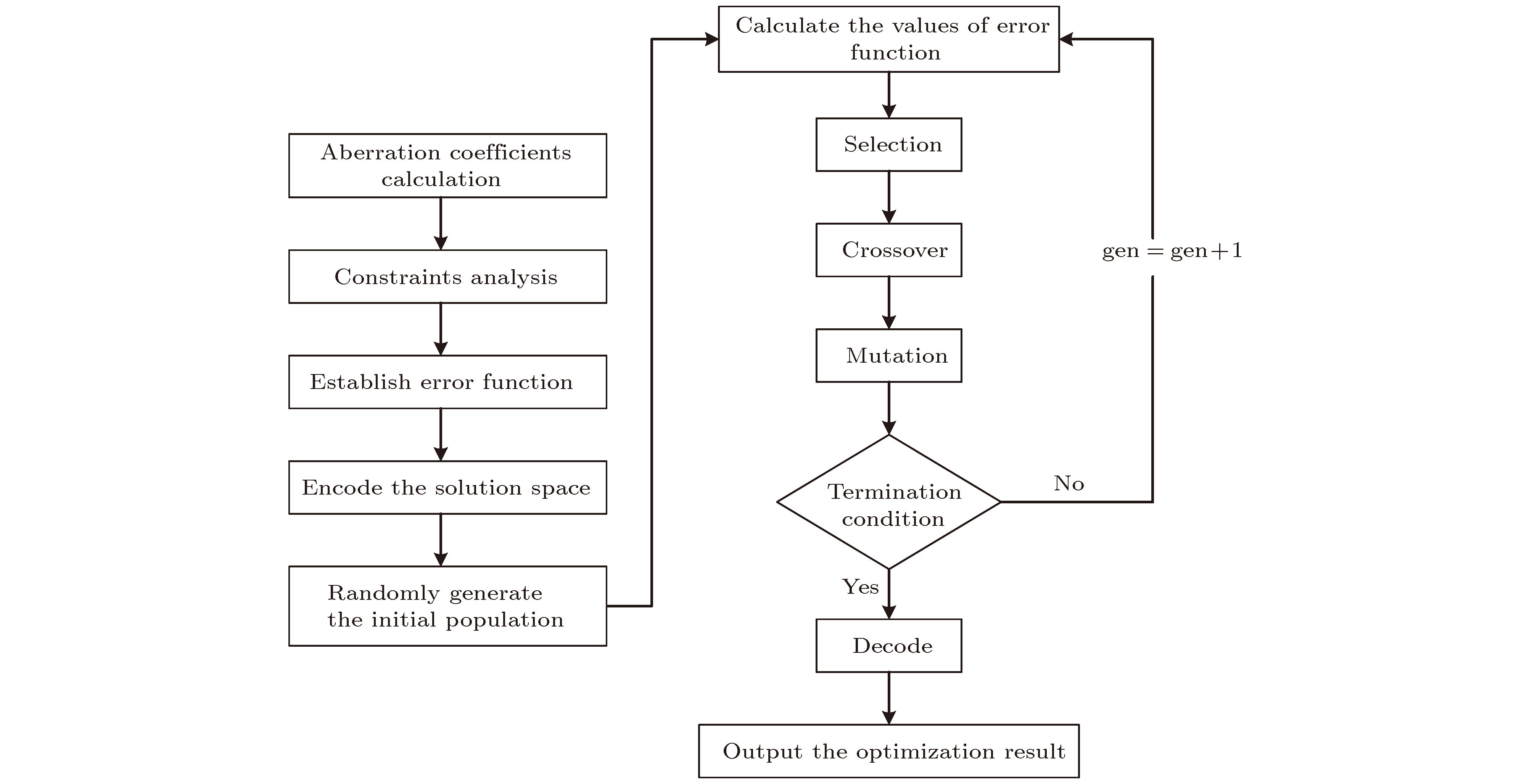 图 3 设计流程
图 3 设计流程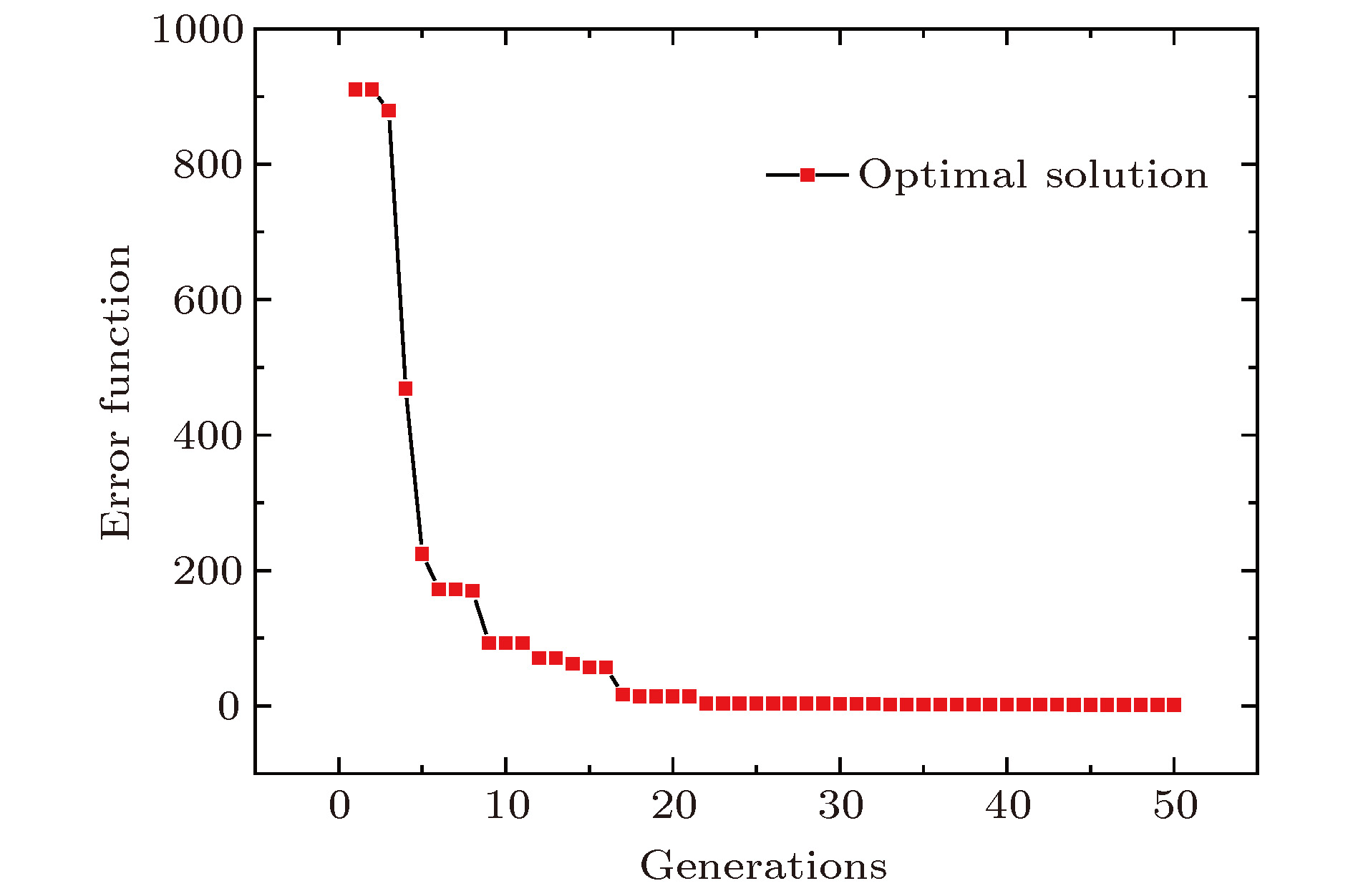 图 4 误差函数收敛曲线
图 4 误差函数收敛曲线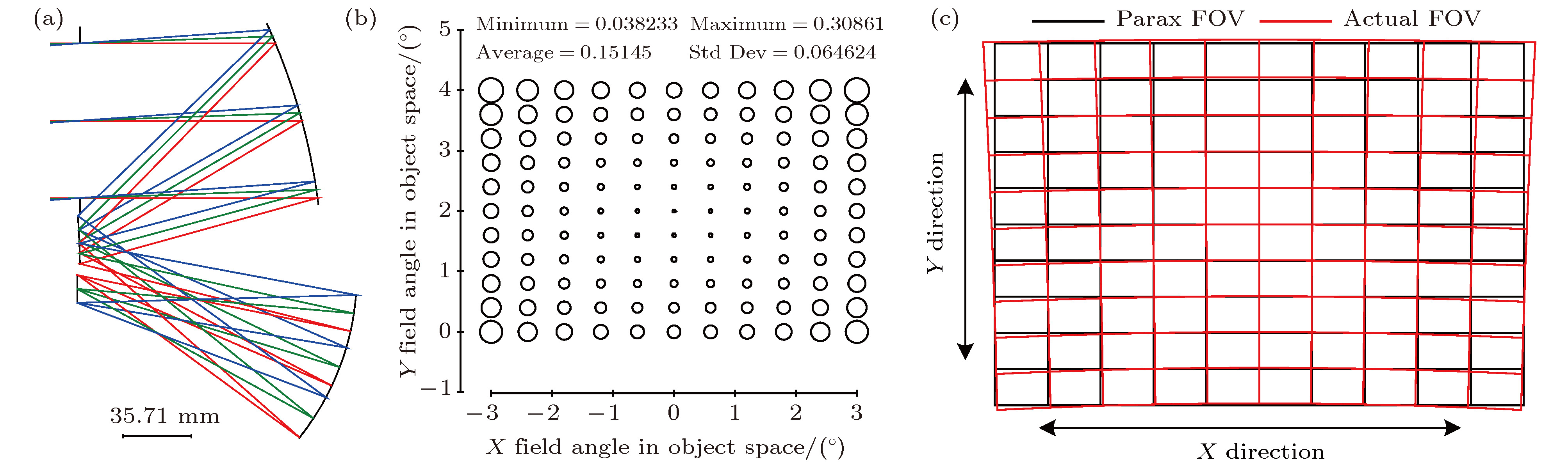 图 5 离轴三反光学系统初始结构性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格
图 5 离轴三反光学系统初始结构性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格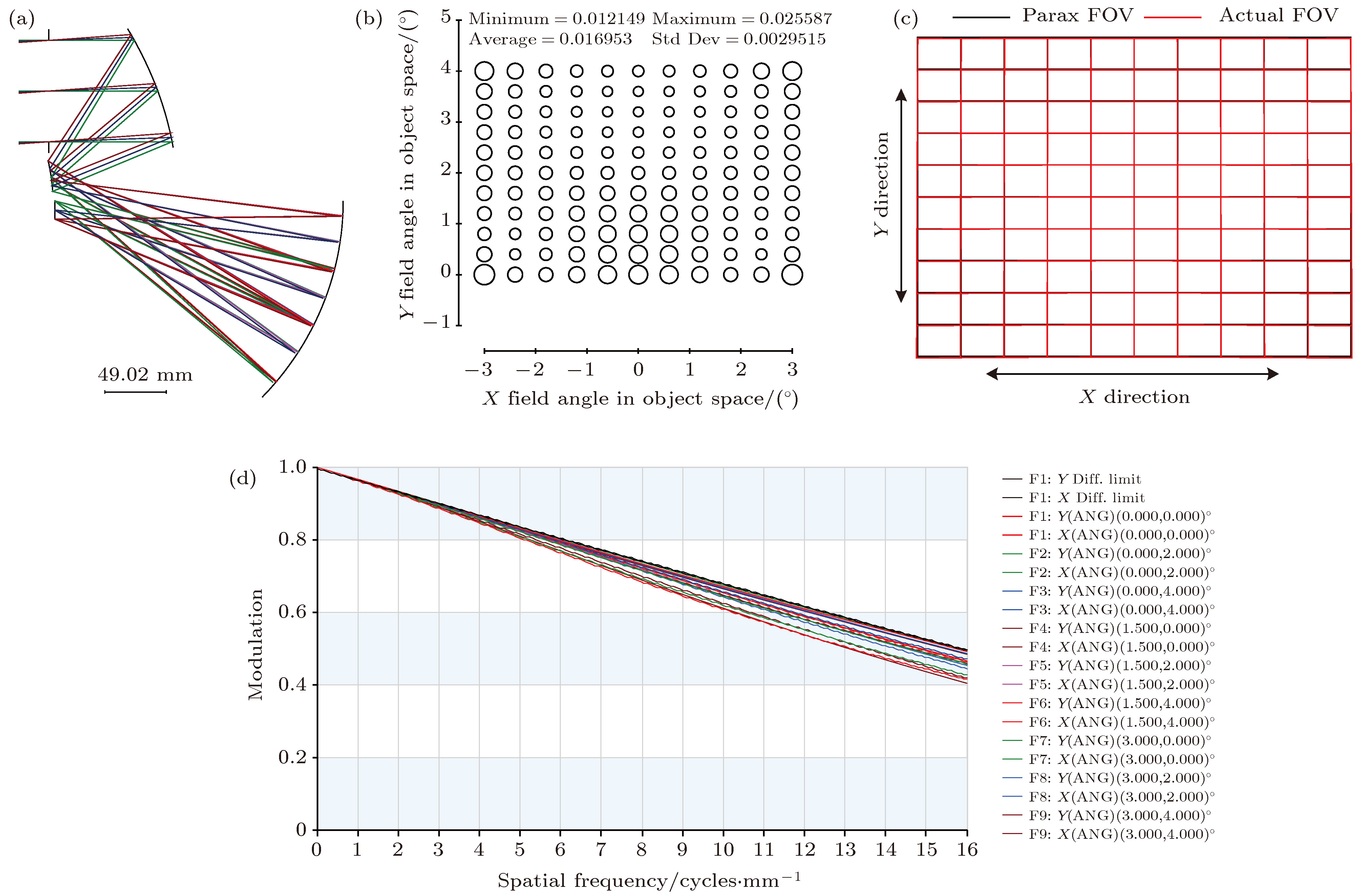 图 6 离轴三反光学系统性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格; (d)调制传递函数
图 6 离轴三反光学系统性能分析 (a)系统布局; (b)点列图均方根直径; (c)畸变网格; (d)调制传递函数