全文HTML
--> --> -->基于舰船磁场的本构关系和有限的测量数据, 采用数学物理方法模拟测量数据, 进而建立一个数学模型来表达舰船磁场, 这种方法被称为舰船磁场的重构或重建. 舰船磁场反演重建计算问题引起了广泛的关注, 并得到了广泛应用[3-5]. 随着磁性水雷技术的发展, 对舰船磁隐身提出了更高的要求, 需要在所关心的所有空间上给出尽可能精确的磁场数据, 为后续设计和调整舰船磁场消除和补偿措施奠定基础.
等效源方法是最常用的舰船磁场重构方法, 基于位场的等效性原理, 利用一组简单的等效磁源代替真实磁源, 通过充分拟合测量数据建立等效源模型, 进而利用等效源模型正演实现舰船磁场的重构和转换. 该方法具有适用性好、稳定性强和计算精度高的优势, 受到广泛关注[6,7]. 具体应用包括: 对不同检测场地所测量的舰船磁场数据进行对比; 将舰船磁场数据从一个深度换算到另一个深度(通常更深); 根据检测数据计算“安全深度”; 检查磁特征测量值的质量; 将磁特征数据转换到任意位置等.
根据高斯通量定理, 磁场源的位函数沿包围场源的封闭曲面法向积分与曲面所包含的磁场源总量有关, 而与磁场源分布无关, 因此在理论上只要满足位场不变条件, 就可以任意地构造“等效”磁场源, 但是由于所测量的舰船磁场分布往往是有限且离散的, 所以合理地构造“等效磁源”模型就成为等效源方法在应用中取得高精度计算结果的关键问题.
常用的等效磁源构建方式为, 将舰船磁性等效为位于舰船水线面的均匀磁化旋转椭球体和均匀分布于吃水线上的磁偶极子阵列混合模型. 其中, 旋转椭球体的长轴等于船长, 短轴等于船宽, 用于拟合舰船的宏观磁场; 磁偶极子阵列模拟舰船的局部不均匀磁场. 例如, 采用磁偶极子和旋转椭球的混合阵列来模拟舰船磁场, 实现了被测目标的磁场反演建模、磁性定位等功能[8-10]. 但是, 目前的舰船磁场等效源方法仍存在一些不足, 忽视了舰船结构的非对称影响, 导致建模精度不高、稳定性较差, 很多时候无法完美拟合到舰船磁场测量数据上. 多个文献采用遗传算法、粒子群算法、模拟退火法等得到磁偶极子阵列的最优位置分布, 获得舰船磁场高精度稳定模型[11,12]. 该类模型计算量较大, 等效磁源模型设置方案缺少针对性, 计算误差较大, 妨碍了这种方法的有效使用.
根据理论分析可知, 若设置的等效磁源与真实磁源在空间分布上十分接近, 将会得到高精度的重构与转换结果. 但真实磁源通常是未知的, 获得真实磁源及其分布无异于舰船结构全空间的磁性物性反演, 计算量和计算难度均会大幅增加. 传统的等效源方法, 其等效性不强调所构建舰船磁性物理模型的合理性, 而较多关注对测量数据的充分拟合, 虽然等效源模型所重构的磁异常值可以很好地拟合测量数据, 但不能控制在随后的数据转换处理中所产生的误差. 例如, 由较深深度向较浅深度预测; 舰船上方磁场和下方磁场的相互转换等. 其主要原因在于构建等效磁源时与真实场源存在不一致, 距离测量磁场点较远位置处的磁场信号分布范围较广, 传统的等效源方法通常会将其采用较近位置处的等效磁源来表达, 难以保证重构或转换的舰船磁场具有完整的波谱特性.
最近, 已经出现了考虑船体结构的磁特性, 基于数值分析方法的舰船磁场反演技术, 具有计算精度高的优点[13-18]. 然而这些技术需要对船体和机械设备剖分单元, 存在建模困难, 求解过程复杂的难题, 不如等效源法适应性好.
本文从等效源方法理论出发, 提出了一种新的舰船磁场磁单极子阵列反演建模法. 采用最简单的磁单极子, 即所谓的点磁荷[19,20], 以描述舰船磁性并建立舰船磁特征的反演数学模型, 并给出了正演和反演数学过程, 拟合参数是描述磁单极子强度的系数. 研究舰船铁磁结构三维建模的简化和优化技术, 将磁单极子配置于实船铁磁结构所定义的坐标上, 提出磁单极子阵列的优化布置方法. 该方法的构建思想是: 设置等效磁源与真实磁源在空间分布上尽量接近, 将会得到高精度的重构与转换结果. 研究了磁单极子等效源布置形式等参数的选取对舰船磁场重构效果的影响. 通过分析产生舰船磁特征信号重建失真的原因, 认为利用按照舰船铁磁结构分布的磁单极子三维船体阵列, 相对于长方形阵列或长方体阵列, 更能有效抑制信号失真. 反演过程重点是要避免过度拟合, 同时需要平衡模型的复杂度. 正则化方法被用于拟合过程以限制模型的复杂度, 模型的系数采用正则化函数进行约束. 采用Tikhonov正则化反演技术求解反演问题[21,22], 实现舰船磁场的精确重现.
所提出的方法被用于一艘典型虚拟舰船的磁场进行验证试验, 从重构精度、磁特征重建情况以及计算效率等方面进行对比, 按照舰船铁磁结构分布的三维船体磁单极子阵列等效磁源布置方案具有最佳的重构效果. 该研究可以显著高舰船空间磁场重构与转换的精度和计算效率, 具有重要的理论意义和实用价值.
根据磁性物理理论, 坐标原点存在一个具有磁荷Q的磁单极子, 类似于点电荷, 那么
 图 1 磁单极子模型
图 1 磁单极子模型Figure1. Magnetic monopole model.
舰船磁源可表示为按照舰船铁磁结构布置的磁单极子阵列, 含n个磁单极子. 设磁单极子i的坐标为(ui, vi, wi),



考虑所有的场点, 可得到一个线性方程组:
 图 2 铁磁舰船航行通过一个磁传感器线阵
图 2 铁磁舰船航行通过一个磁传感器线阵Figure2. Ferromagnetic ship runs over a line array of magnetic sensors.
 图 3 铁磁舰船及其下方的虚拟磁传感器长方形阵列
图 3 铁磁舰船及其下方的虚拟磁传感器长方形阵列Figure3. Ferromagnetic ship stands over a virtual array of magnetic sensors.
针对上述舰船, 可采用一定的技术步骤得到最优化的磁单极子阵列分布, 如图4和图5所示, 并反演重建舰船的磁性参数.
 图 4 舰船结构上的磁单极子阵列分布
图 4 舰船结构上的磁单极子阵列分布Figure4. Magnetic monopole array in the geometry of ship.
 图 5 机组和推进轴的磁单极子分布
图 5 机组和推进轴的磁单极子分布Figure5. Magnetic monopoles for the engine block and the shaft.
本研究采用反演技术根据虚拟磁传感器阵列测量值来重建舰船的磁源模型, 由舰船铁磁结构上分布的磁单极子阵列构成. 舰船图纸或CAD模型被用于建立舰船磁单极子阵列模型. 采用自编的舰船磁场综合分析软件MagShip来实现这个目的[23-25]. 所建立的舰船磁性模型包括船体、机械设备、推进轴等. 舰船结构被划分为一定数目的点单元, 并找出等效磁单极子阵列的最优分布. 根据舰船的铁磁结构信息可方便地构建相应的磁单极子阵列模型, 能够完整体现舰船磁性结构信息. 最后, 采用Tikhonov正则化反演技术得到舰船磁单极子阵列磁源模型.
舰船磁模型将给出重建的磁特征, 根据磁特征测量数据, 按照最小二乘理论可以得到磁单极子强度Q. 根据不同航向上的磁特征测量数据, 可以分解得到磁特征的感应部分和固定部分. 该模型可以用于计算舰船不同深度或距离上的舰船磁特征.
舰载消磁线圈的磁特征可以定义为磁单极子强度的差值, 每个线圈只需要一个航次的测量就可以实现, 多个航次的磁场测量值就可以进一步消除不确定性. 在不同测磁阵列、不同深度、不同航向、不同航次上测量的磁场数据都可以归结为磁单极子的强度数据.
舰船下方测磁阵列测量得到的磁场数据可作为反演问题的目标磁场. 问题的目标函数在数学上可以定义如下:
研究表明, 磁单极子阵列法比现存方法具有更高的反演建模精度、可靠性和速度. 该方法不但适用于舰艇磁场的反演建模, 还适用于舰载消磁线圈系统的磁场反演建模.


关于病态问题的理论已经存在很多文献. 主要的困难涉及下述最小二乘问题, 是求解最优化问题,
若算子方程AQ = b是不适定的, Tikhonov正则化方法的最简单形式为, 对于任给的正数



若记






采用L曲线法选择正则化参数, 能够深入探究所研究的问题, 有助于问题的解决, 如图6所示.
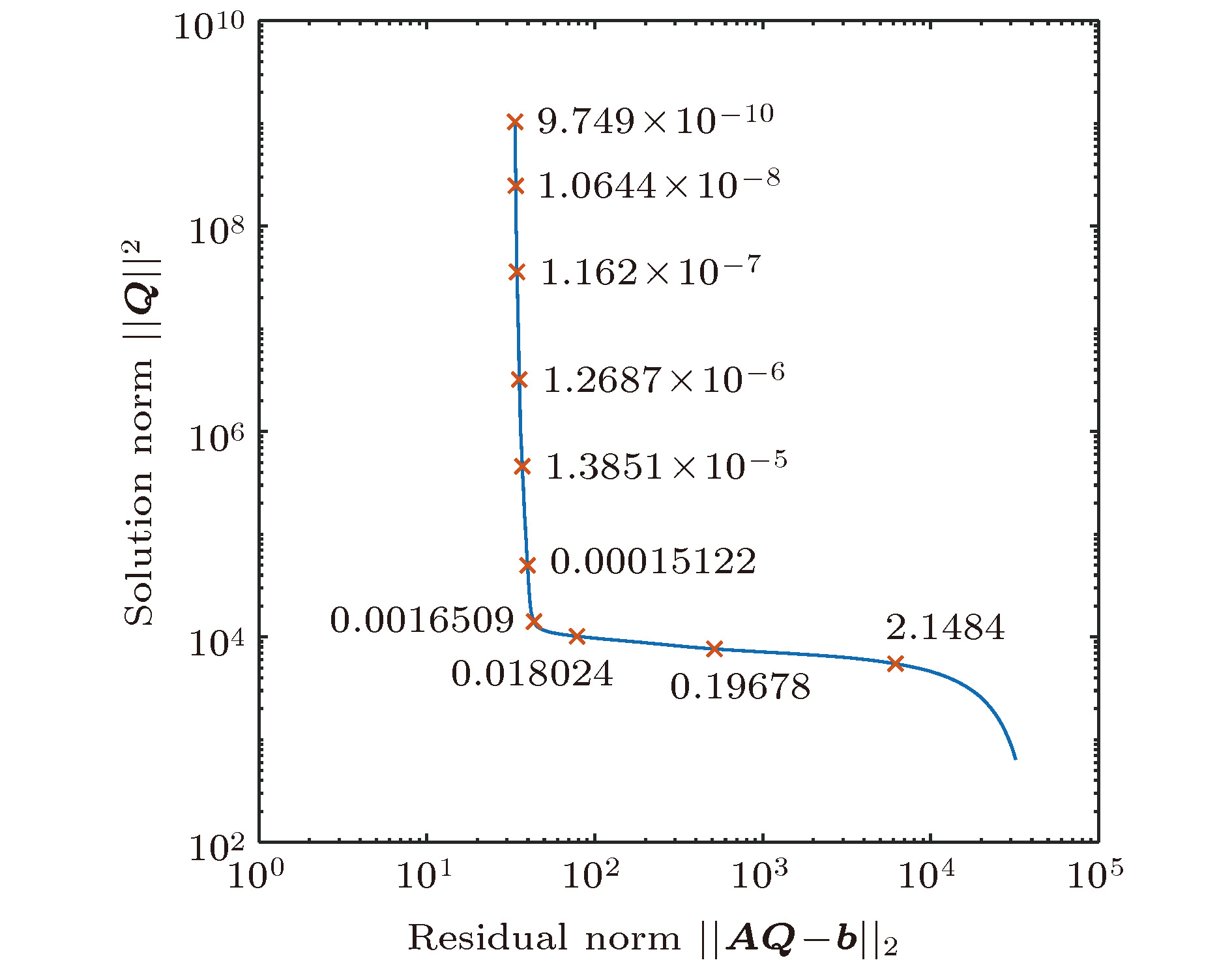 图 6 根据L曲线法得到正则化参数
图 6 根据L曲线法得到正则化参数Figure6. Regularization parameter obtained by the L-curve method.
根据已知的舰艇磁场测量值和线性测量矩阵, 采用Tikhonov正则化技术求解线性方程组所描述的逆问题, 可以得到所有磁源的正则化解Qα. 从而可以知道舰艇磁场的拟合计算值bα = AQα, 进而知道拟合误差berr-α=bα – b. 实际上根据拟合误差berr-α, 可以判断哪些测量点上的磁场测量值存在粗大误差, 需要重新测量以修正测量误差或排除该测量值, 实现舰艇磁场纠错的目的. 根据纠错后的舰艇磁场测量值, 再次进行正则化反演计算, 得到最接近真实的正则化解Qα. 根据该正则化解Qα可以得到其他测量点位置处的舰艇磁场预测值, 从而实现舰艇磁场的综合分析, 如图7所示.
 图 7 舰船磁场预测值和测量值的对比
图 7 舰船磁场预测值和测量值的对比Figure7. Comparison of predicted and measured values of ship's magnetic field.
4.1.磁单极子阵列设置
所采用的反演目标为按照实际舰船结构抽象出来的一艘虚拟典型舰船, 其中船长表示为L, 船宽表示为B, 船高表示为H. 不同的磁单极子分布形式具有不同的反演效果, 设置三种磁单极子阵列分布形式进行对比分析, 分别为:1)水线平面上的长方形磁单极子阵列 (简称“长方形阵列”), 由L × B = 25 × 5 = 125个磁单极子构成, 如图8所示;
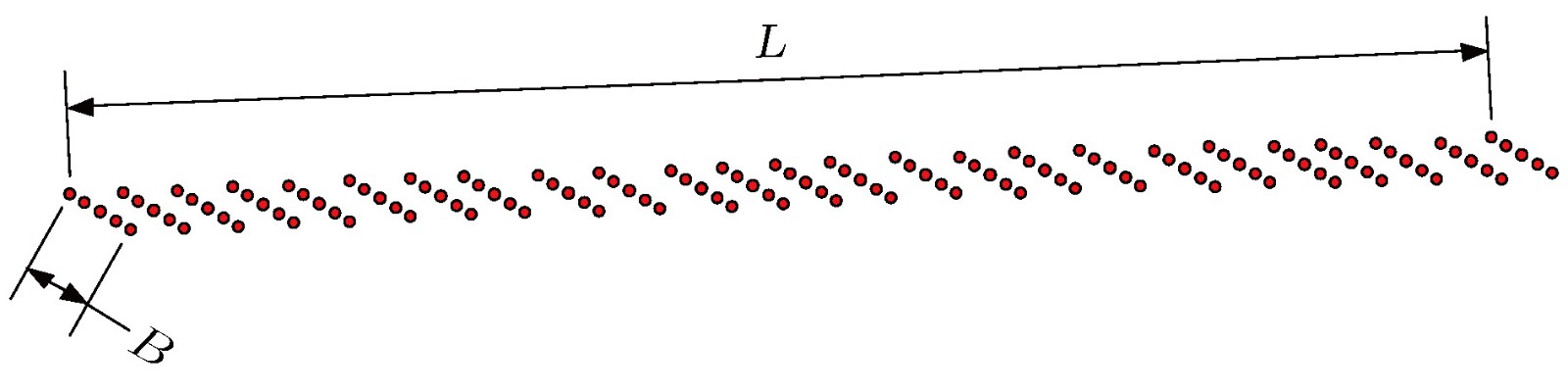 图 8 吃水线水平面上的长方形磁单极子阵列
图 8 吃水线水平面上的长方形磁单极子阵列Figure8. Rectangular magnetic monopole array on the horizontal surface of the draft line.
2)包围船体的长方体磁单极子阵列 (简称“长方体阵列”), 由L × B × H = 25 × 5 × 4 = 500个磁单极子构成, 如图9所示;
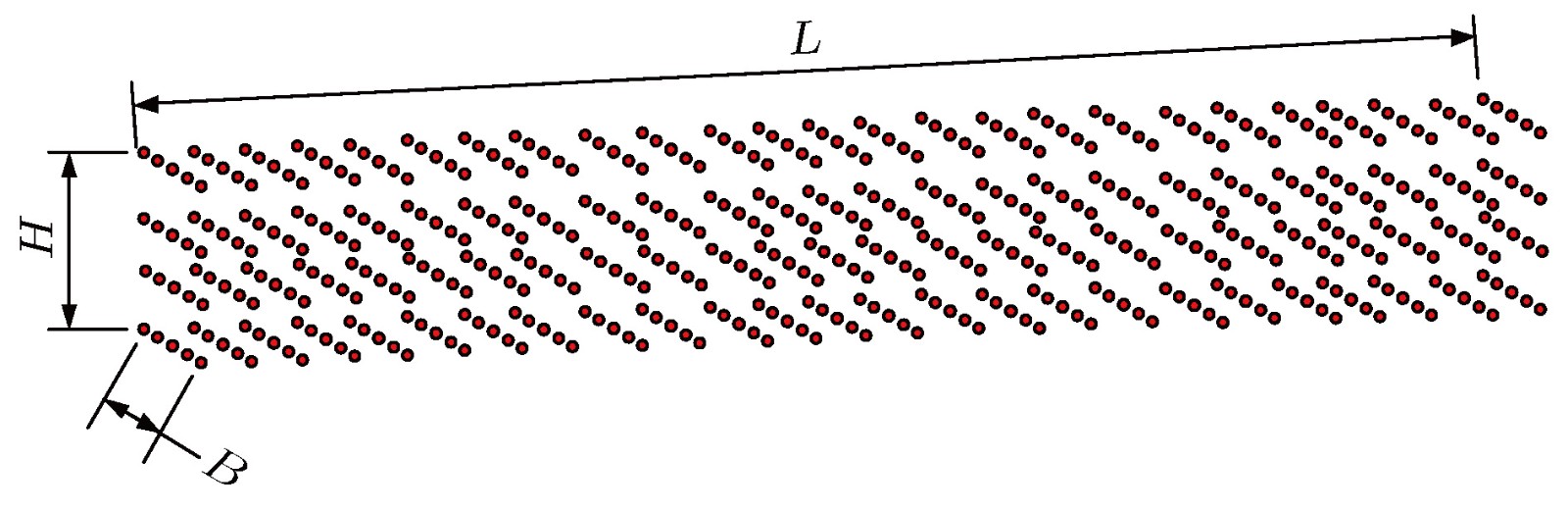 图 9 包围船体的长方体磁单极子阵列
图 9 包围船体的长方体磁单极子阵列Figure9. Cuboid magnetic monopole array enclosing the ship hull.
3)按照船体铁磁结构分布的三维船体阵列 (简称“三维船体阵列”), 由L × B × H = 347个磁单极子构成, 如图10所示.
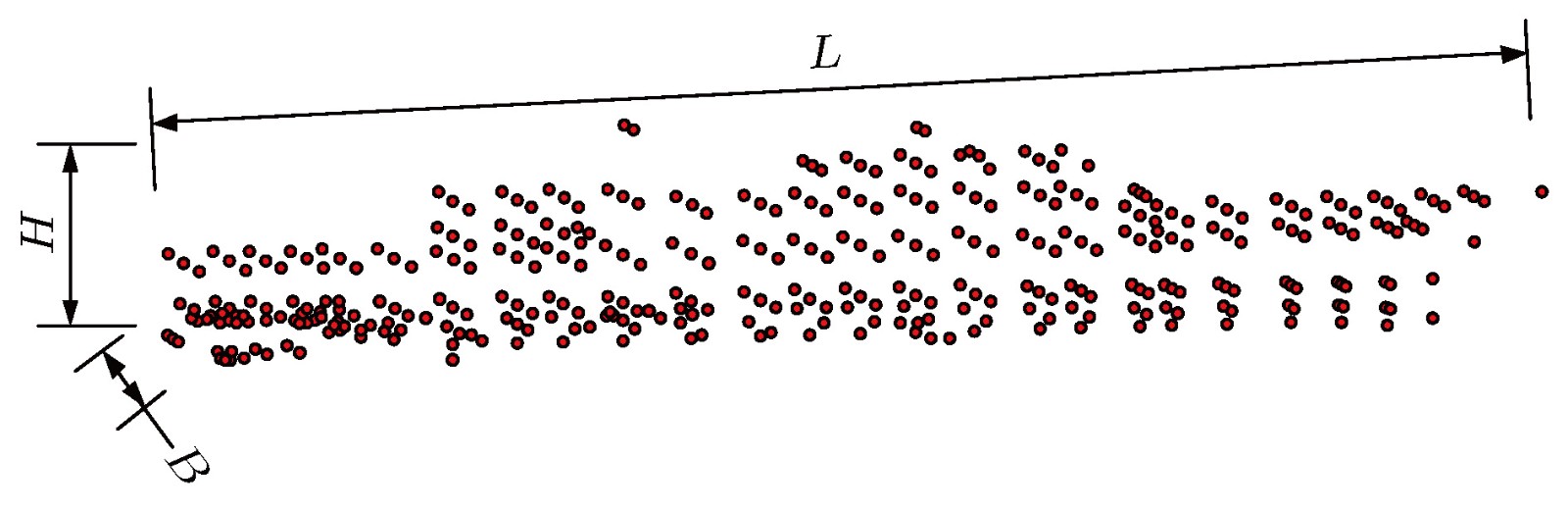 图 10 按照船体铁磁结构分布的三维船体磁单极子阵列
图 10 按照船体铁磁结构分布的三维船体磁单极子阵列Figure10. Three-dimensional ship magnetic monopole array distributed according to the ferromagnetic structure of the ship hull.
2
4.2.磁场测量点的配置
磁场测量点配置为2L × 2B = 81 × 9 = 729的点阵, 分布范围为长2L、宽2B, 点的纵向间隔为L/40, 横向间隔0.25B, 如图11所示. 取5个测量深度平面: 吃水线下方+1B, +2B, +5B三个深度, 吃水线上方–2B, –5B两个深度, 如图12和图13所示. 此处未设置–1B深度平面, 因为舰船部分上层建筑高度较大, 与此深度平面存在结构冲突. 在舰船磁场测量领域, 一般取船首方向为x轴正向, 右舷方向为y轴正向, 垂直向下为z轴正向, 如图12和图13所示. 图 11 舰船磁场测量点分布俯视图
图 11 舰船磁场测量点分布俯视图Figure11. Top view of the distribution of magnetic field measurement points on ship.
 图 12 舰船磁场测量点分布侧视图
图 12 舰船磁场测量点分布侧视图Figure12. Side view of distribution of magnetic field measurement points on ship.
 图 13 舰船磁场测量点分布后视图
图 13 舰船磁场测量点分布后视图Figure13. Rear view of the distribution of magnetic field measurement points on ship.
2
4.3.舰船磁场的产生
舰船磁场的产生采用自编的舰船磁场综合分析软件MagShip[23-25], 该软件联合了磁矩量法(magnetic moment method)[26,27]和多层自适应交叉近似法[28], 能够方便快速地建立复杂结构舰船的磁特征模型. 更重要的是, 该技术尤其适用于计算舰船这种开域铁磁结构的磁性磁场, 因为其无需在自由空间中划分网格, 仅需要对舰船铁磁结构建模. 无论计算舰船磁场的近场还是远场, 均能保持相同的高精度. 例如, 对于典型舰船, 只需对舰船铁磁结构划分几万个单元就可以得到精确可靠的舰船磁特征, 近场 (例如上述+1B测量深度平面磁场)计算结果与商业有限元软件相比差别小于1%, 而且易于处理有限元软件难以处理的远场 (例如上述+5B, –5B测量深度的平面磁场).采用约10万单元处理上述虚拟典型舰船, 其具有复杂铁磁结构, 包含船体、上层建筑、机械设备、船轴等完整舰船铁磁结构, 能够代表实际舰船的复杂磁特征. 采取下述设置产生舰船磁场数据, 包括感应磁场、永久磁场、测磁噪声:
1) 感应磁场 舰船在纵向40000 nT, 横向20000 nT, 垂向30000 nT的均匀外磁场作用下产生的感应磁场;
2) 永久磁场 取感应磁场的30%为永久磁场;
3) 测磁噪声 取[–1 nT, +1 nT]范围内的随机量作为测磁噪声.
2
4.4.数据分析参数的定义
为了分析数据, 定义下述两个变量:1)相对误差(relative error, RE)
2)相对残差(relative residual error, RRE)
2
4.5.数值仿真试验结果
按照上述设置, 得到具有典型意义的虚拟舰船磁性分布, 产生5个测磁深度平面的舰船磁场分量数据. 分别采用长方形、长方体、三维船体磁单极子阵列模型进行舰船磁场反演建模, 根据得到的磁单极子阵列强度在5个测磁深度平面之间互相进行舰船磁场预测, 计算结果见表1. 从表中可以看出:| 测量深度 | 阵列形式 | 正则化参数$\alpha$ | 相对残差/% | 相对误差/% | ||||
| +1B | +2B | +5B | –2B | –5B | ||||
| +1B | 长方形 | 0.1323 | 4.65 | 4.56 | 8.25 | 28.23 | 95.00 | 101.76 |
| 长方体 | 0.0069 | 0.08 | 0.08 | 0.03 | 0.24 | 8.50 | 3.65 | |
| 三维船体 | 0.0030 | 0.05 | 0.04 | 0.01 | 0.03 | 5.49 | 0.50 | |
| +2B | 长方形 | 0.0177 | 2.15 | 13.28 | 2.14 | 10.03 | 91.06 | 85.98 |
| 长方体 | 0.0026 | 0.09 | 1.23 | 0.02 | 0.09 | 16.30 | 3.64 | |
| 三维船体 | 0.0020 | 0.09 | 0.65 | 0.01 | 0.03 | 7.05 | 1.64 | |
| +5B | 长方形 | 0.0190 | 3.64 | 34.51 | 19.15 | 3.62 | 80.15 | 78.21 |
| 长方体 | 0.0028 | 0.50 | 11.07 | 2.28 | 0.07 | 25.99 | 11.68 | |
| 三维船体 | 0.0021 | 0.49 | 5.55 | 0.94 | 0.04 | 17.13 | 3.12 | |
| –2B | 长方形 | 0.0020 | 1.54 | 190.80 | 114.68 | 92.25 | 1.54 | 6.62 |
| 长方体 | 0.0024 | 0.08 | 15.43 | 5.65 | 2.41 | 0.03 | 0.05 | |
| 三维船体 | 0.0026 | 0.11 | 10.20 | 3.63 | 1.25 | 0.08 | 0.05 | |
| –5B | 长方形 | 0.0216 | 4.39 | 90.31 | 86.81 | 86.29 | 29.79 | 4.39 |
| 长方体 | 0.0034 | 0.46 | 29.81 | 20.97 | 16.42 | 7.01 | 0.11 | |
| 三维船体 | 0.0021 | 0.44 | 15.36 | 8.99 | 5.18 | 3.51 | 0.06 | |
表1验证试验的计算结果
Table1.Results of the validation test.
1)长方形磁单极子阵列在5个深度上均对测量数据拟合较差(相对残差1.54%—4.65%); 在舰船上下方的同一侧由近场向远场预测精度较低(相对误差6.62%—28.23%), 无法由远场向近场预测(相对误差13.28%—29.79%); 无法在舰船上下方的两侧相互预测(相对误差78.21%—190.80%);
2)长方体磁单极子阵列在5个深度上均对测量数据拟合较好(相对残差0.08%—0.50%); 在舰船上下方的同一侧由近场向远场预测精度高(相对误差0.03%—0.24%), 由远场向近场预测精度尚可(相对误差1.23%—11.07%); 难以在舰船上下方两侧相互预测, 由近场向对侧远场预测精度尚可(相对误差2.41%—8.50%), 向对侧同等距离预测误差较大 (相对误差5.65%—16.42%), 由远场向对侧近场预测误差很大(相对误差15.43%—29.81%);
3)三维船体磁单极子阵列在5个深度上均有较小相对残差(0.05%—0.49%), 对测量数据的拟合较好; 能在舰船上下方的同一侧由近场向远场高精度预测(相对误差0.01%—0.05%), 由远场向近场预测精度较高(相对误差0.65%—5.55%); 可在舰船上下方两侧相互预测, 由近场向对侧远场精度较高(相对误差0.50%—5.49%), 向对侧同等距离预测精度较高(相对误差3.12%—7.05%), 由远场向对侧近场预测精度尚可(相对误差8.99%—17.13%).
长方体磁单极子阵列所构建的等效磁源能够覆盖舰船真实场源的分布空间, 因此也可以较好地拟合测量数据. 但是所构建的等效磁源与舰船真实磁源存在一定的位置偏差, 甚至部分等效磁源不可避免地超出了舰船铁磁结构的分布空间, 偏差更大. 因此, 导致在舰船上下方的同一侧由近场向远场预测时虽然能实现很高的计算精度, 但是对于由远场向近场预测以及舰船上下方两侧之间相互预测问题上则存在较大误差.
三维船体磁单极子阵列所构建的等效磁源按照舰船铁磁结构布置, 与舰船真实磁源的一致性很高, 分布范围和位置均非常接近. 因此, 三维船体磁单极子阵列是最优的布置形式, 不但能很好地拟合测量数据, 后续的磁场预测结果也具有很高的精度. 尤其是能够实现舰船磁场的上下方两侧之间相互预测, 且精度较高.
以三维船体磁单极子阵列模型从舰船上方的–2B平面向舰船下方平面预测为例, 在–2B平面对测量数据拟合的相对残差为0.11%, 在+1B, +2B,+5B平面磁场预测的相对误差分别为10.20%,3.63%, 1.25%. 取舰船龙骨下方坐标x = –1L—+1L, y = 0, z = +1B, +2B, +5B的三条典型测量点线, 进行舰船三分量磁场预测值和真实值的对比, 结果分别如图14, 图15和图16所示. 从图中可以看出, 从–2B平面向+1B, +2B, +5B平面的预测值与真实值均符合较好, 证明三维船体磁单极子阵列模型能够实现舰船磁场从舰船上方向舰船下方的高精度预测.
 图 14 +1B深度典型测量点线上的舰船磁场预测值和真实值对比
图 14 +1B深度典型测量点线上的舰船磁场预测值和真实值对比Figure14. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +1B depth.
 图 15 +2B深度典型测量点线上的舰船磁场预测值和真实值对比
图 15 +2B深度典型测量点线上的舰船磁场预测值和真实值对比Figure15. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +2B depth.
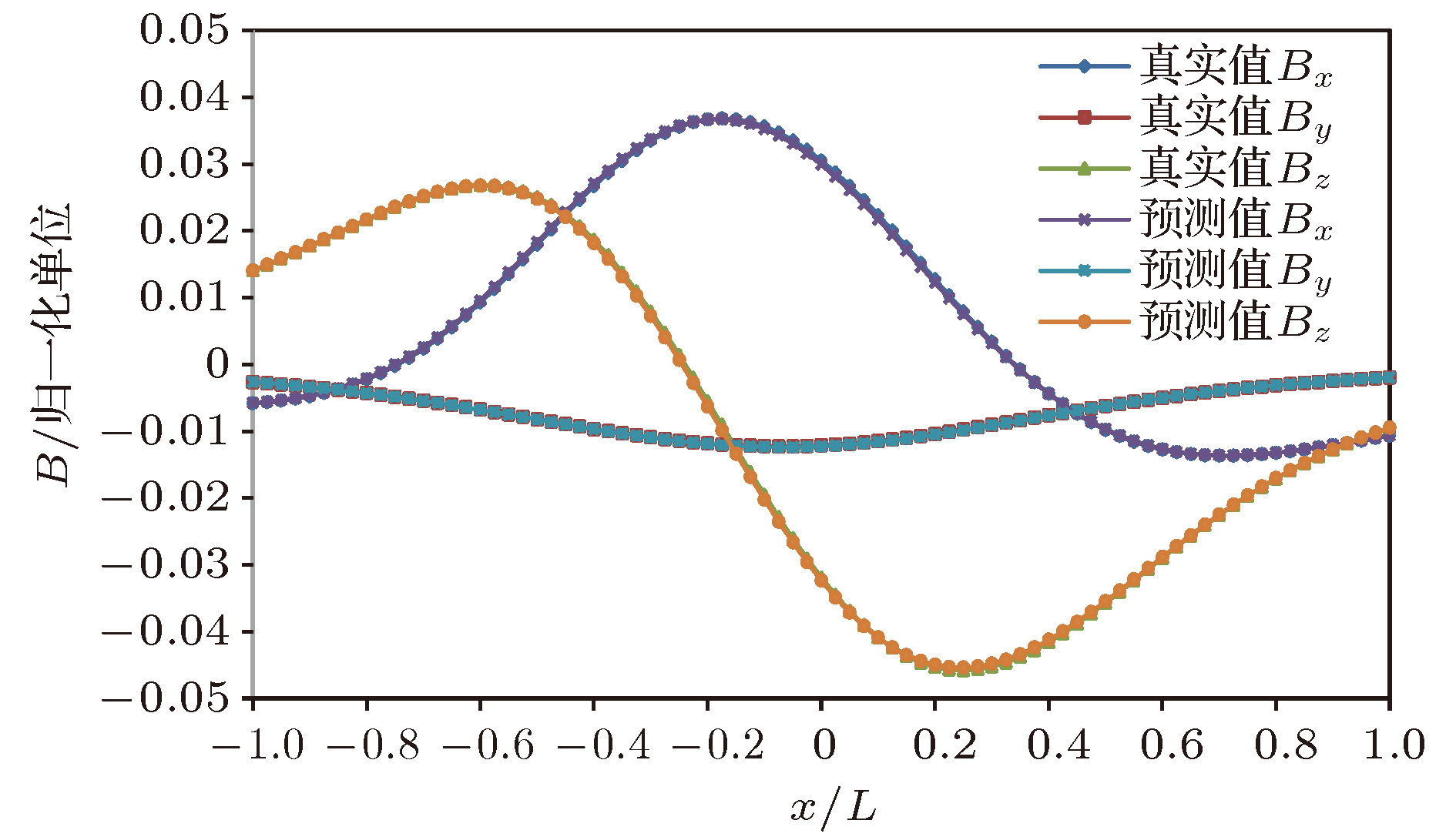 图 16 +5B深度典型测量点线上的舰船磁场预测值和真实值对比
图 16 +5B深度典型测量点线上的舰船磁场预测值和真实值对比Figure16. Comparison of predicted and real values of ship's magnetic field on typical measuring point line in +5B depth.
