引 言
固定翼飞机一直面临着高速和低速飞行性能要求的矛盾: 后掠翼可以有效降低激波阻力, 但在亚音速状态下飞行效率低; 平直机翼在低速飞行时具有较好的飞行性能, 但在跨音速区域, 受到的激波阻力却急剧增长. 变后掠机翼可同时兼顾高低速两个方面的要求. 从20世纪30年代以来, 变后掠翼飞机经历了长达近百年的发展. 早期的Pterodactyl IV验证机、F-14战斗机、Tornado战斗机和Tu-160轰炸机均实现了主动改变机翼后掠角而带来的飞行性能提升. 然而, 增加飞机重量和结构复杂度的缺点使变后掠翼在20世纪70年代后的发展与应用陷入停滞. 2003年, 美国国防部先进研究计划局(DAPRA)启动“变体飞行器结构(MAS) ”研究计划, 重新掀起了变体机翼的研究热潮[1-3]. 受此计划的鼓舞, 一些关于变后掠翼的新概念性设计浮现出来, 比如美国佛罗里达大学研制的独立多关节变后掠翼, 新一代航空技术公司研制的验证无人机MFX-1和MFX-2. 与早期研究不同, 当前变后掠翼的研究重点倾向于高性能材料(比如柔性蒙皮)和驱动装置(比如智能结构、柔顺机构)的设计和使用.
目前, 固定翼下的气动弹性系统建模已经成熟, ZAERO软件和NASTRAN中的气动弹性分析模块均可对固定翼飞行器进行颤振速度的计算和动态响应分析. 而在可变后掠机翼的气动弹性建模和分析方面的研究较少. 飞行器在变体过程中, 系统的动力学特性随着变体控制参数的变化而变化, 相应的气动弹性方程本质上是随参数时变的. 对于参数慢变情形, 可采用时间冻结法, 获得某一变体参数下的气动弹性模型.
在变体飞机方面, Zhao和Hu[4]和Huang等[5] 提出了一种利用子结构综合和偶极子网格法构建折叠翼的参数化气动弹性建模方法, 可对不同构型下的折叠翼实现快速的颤振分析, 分析结果发现对于不同折叠角下的机翼其气动弹性特征将发生显著改变. Hu等[6] 在此基础上采用Krigin代理模型技术对不同后掠角下的空气动力影响矩阵进行插值, 获得了参数化的气动弹性模型并研究了折叠翼变形过程中的时变气动弹性响应. Xu等[7] 利用ADAMS对折叠翼进行柔性多体动力学建模, 将不同后掠角下的非定常气动力进行插值后与结构进行耦合, 计算分析了折叠翼快速展开过程中的瞬态响应. 詹玖榆等[8]利用流形插值技术[9] 对模态坐标下不同构型折叠翼的刚度矩阵、质量矩阵和振型矩阵进行插值, 建立了参数化的结构动力学模型, 并将其与偶极子网格法相结合计算了折叠翼的气动弹性行为.
对可变后掠翼, 大量的研究集中在最优变形规律以及变后掠翼气动布局等方面, 对于可变后掠翼的参变气动弹性系统建模方法和慢时变气动弹性方面的研究依然匮乏, 变后掠过程中准确而高效地计算气动弹性响应仍是一项具有挑战性的工作. 由于变后掠翼在结构变体过程中参数是变化的, 使得参变气动弹性系统的建模存在一定困难. 线性参变系统(linear parameter varying, LPV)[10] 模型可以用来描述受时变参数影响的线性系统的动力特征, 也可以用一系列当地线性模型来表征非线性系统. 一般地, LPV建模方法有两种: 全局建模方法[11-13] 和当地建模方法[14-15]. 利用全局模型能够进行全局参变的研究, 即任意激励下结构持续参变过程中的动态响应研究. 显然, 这一要求比较苛刻, 一般很难实现[16]; 后者则是利用当地建模技术, 采用时间冻结法, 在不同固定参数下生成当地的线性时不变(linear time invariant, LTI)模型, 然后对这些LTI模型进行合理的插值来建立线性参变模型. 利用当地建模技术建立LPV模型的方法要求所建立的当地LTI模型必须具有一致的状态空间形式. 若直接对系统矩阵进行插值可能带来很大风险甚至得到错误的状态空间模型, 这是由于同一系统的状态空间实现并不唯一, 导致不同参数点处的状态空间表达并不具有一致性. 上述研究均未能讨论和考虑模型的一致性问题.
Paige[17] 和Wassink等[18] 着重强调了不一致的LTI状态空间表达式对于当地LPV模型实际应用的影响和限制. 因此, 如何有效的解决当地模型之间的不一致问题, 便成为了当地LPV模型能否成功运用的关键. Paijmans等[19] 提出了一种依赖于仿射参数空间实现的LPV建模技术, 该方法需要对当地模型的极点和零点的轨迹进行排序和拟合. Caigy等[20] 提出了一种单输入单输出(single input single output, SISO)的LPV建模方法, 该方法需要划分多个子模型. Caigy等[21] 将当地LTI模型划分为一系列当地子模型[19-20] 的方法推广到多输入多输出(multiple input multiple output, MIMO)情况, 对当地模型的极点和零点进行排序, 将原始的当地模型分解为一个增益与一阶和二阶子模型状态空间串联的形式, 得到了一致的状态空间表达式. Krolick等[22] 提出了一种基于数据驱动的模型降阶方法, 并探讨了不同参数下模型的一致性问题, 发现利用自回归(autore-gressive exogenous, ARX)方法建立的参数化模型一致性较好. Goizueta等[23] 利用Krylov子空间来构造线性转换矩阵, 解决了LTI模型不一致问题.
以上方法均是从已知的、参数空间中离散点处的、不一致的状态空间方程出发, 通过对状态空间方程的一致性处理来获得参变系统状态空间模型的. 本文则从另一种角度出发: 即在构造参变空间内离散点处的状态空间模型之前就解决可能存在的不一致性问题. 因而后续所建立的、离散点处的状态空间模型就是一致的, 参变空间内任意点处的状态空间模型便可通过对一致的当地模型进行插值得到. 可通过数值结果验证了本文方法的正确性和有效性. 本文采用当地气动弹性建模技术, 深入研究了如何建立一致的当地气动弹性状态方程的可靠方法, 以期为MIMO的参变气动弹性系统建模提供参考数据.
1.
变后掠翼的参数化结构动力学建模
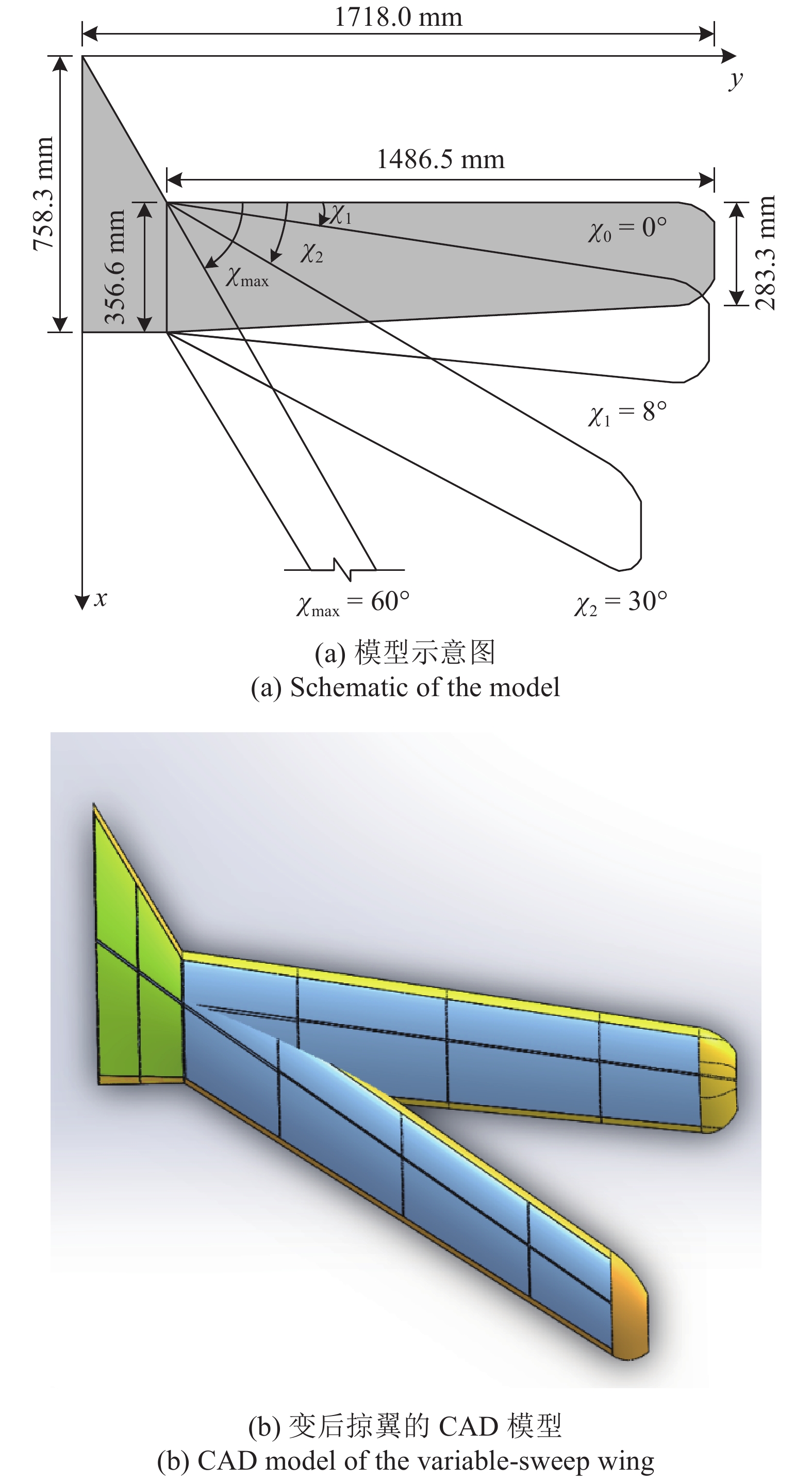
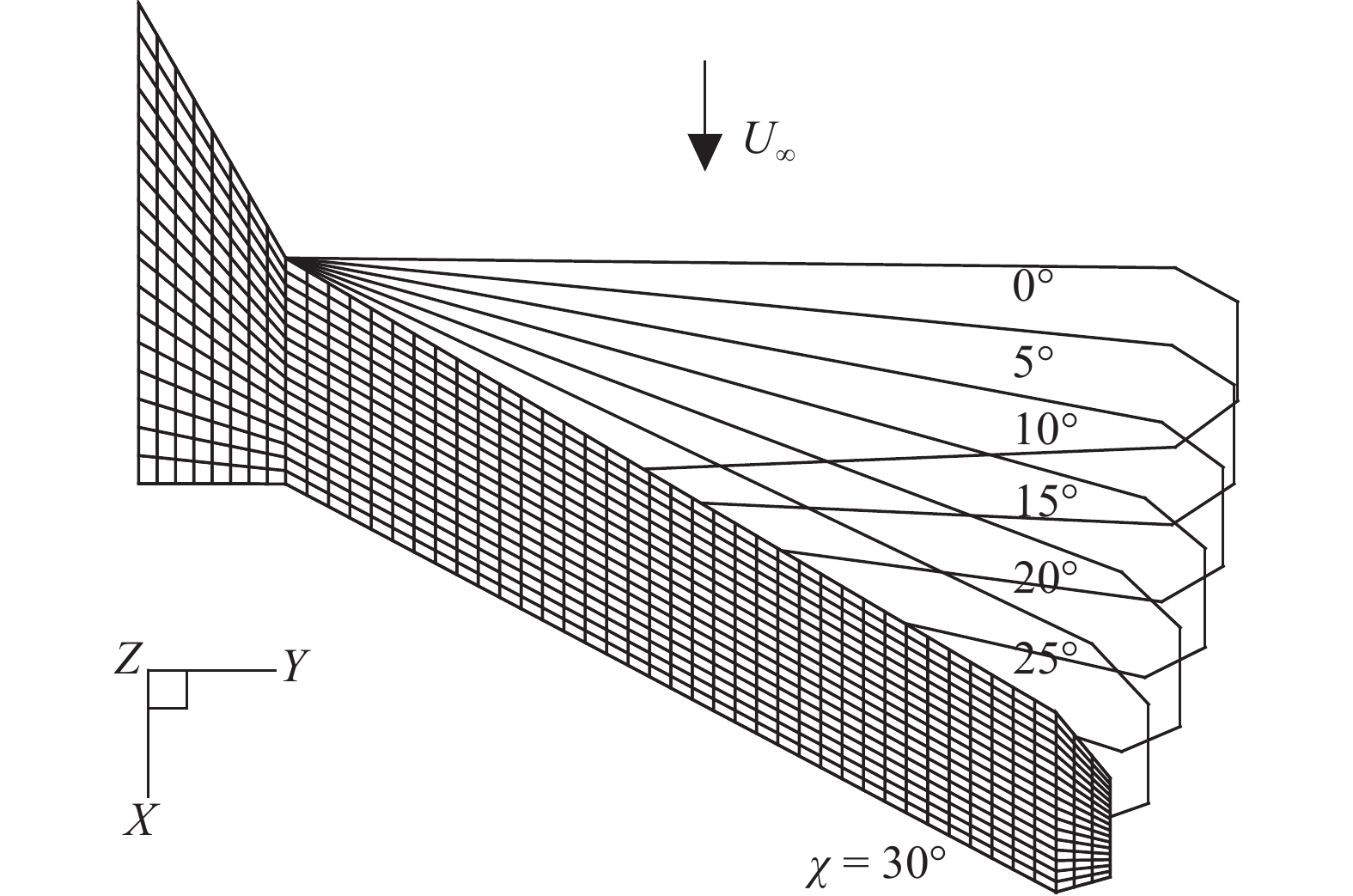
变后掠翼如图1所示. 机翼采用旋转?剪切变后掠设计, 翼肋在变后掠过程中保持顺气流翼型不变. 机翼的结构设计参数为: 翼根弦长758.3 mm, 翼尖弦长283.3 mm, 平均弦长346.4 mm, 半展长1718.0 mm, 机翼面积0.5957 m2, 重量20.23 kg. 机翼的前缘后掠角



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
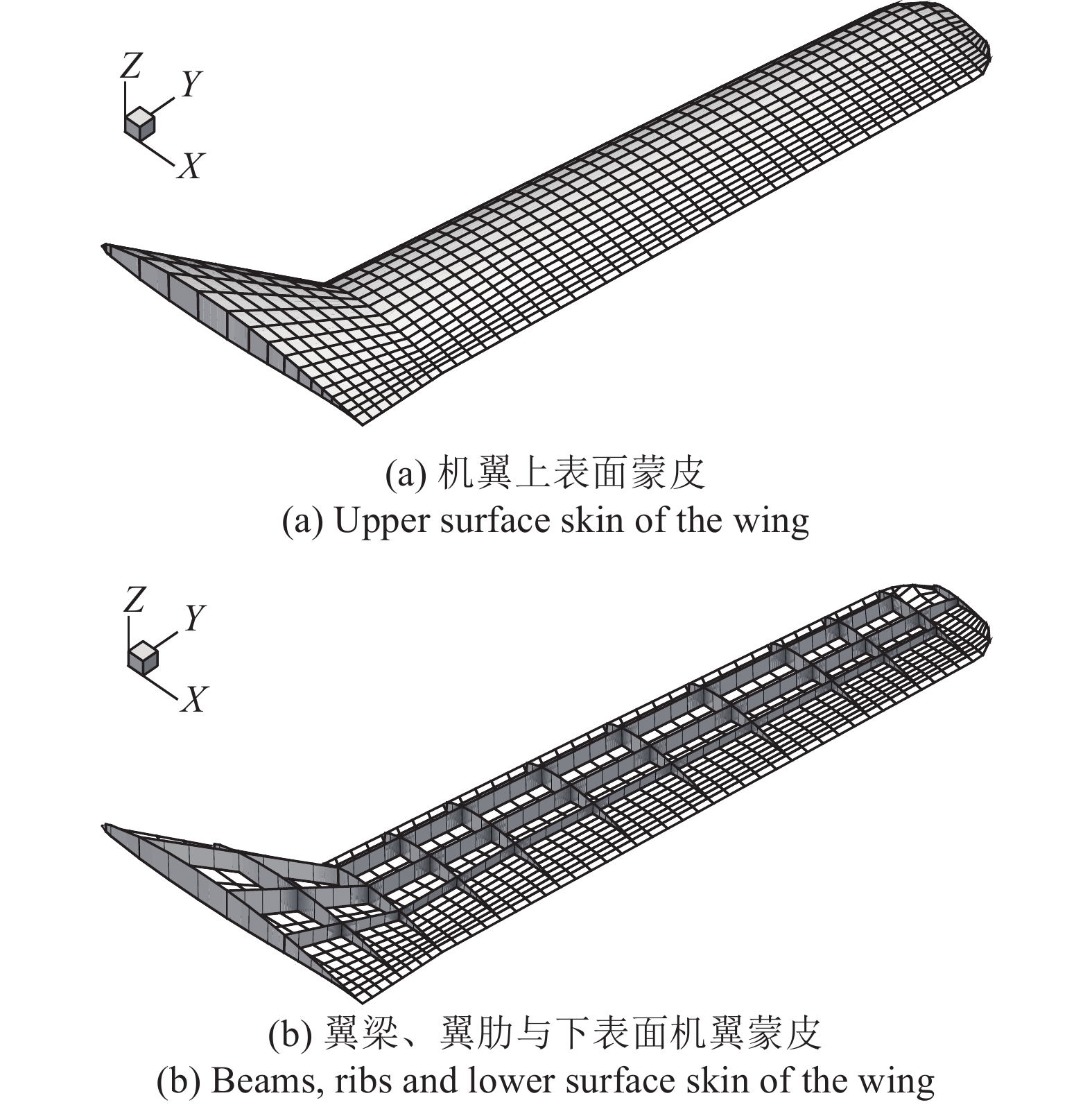
变后掠翼的几何模型
Figure
1.
Geometric model of the variable-sweep wing
 下载:
下载: 全尺寸图片
幻灯片
后掠翼的运动方程依赖于后掠角



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
变后掠翼的有限元模型(

Figure
2.
Finite element model of the variable-sweep wing (
 下载:
下载: 全尺寸图片
幻灯片
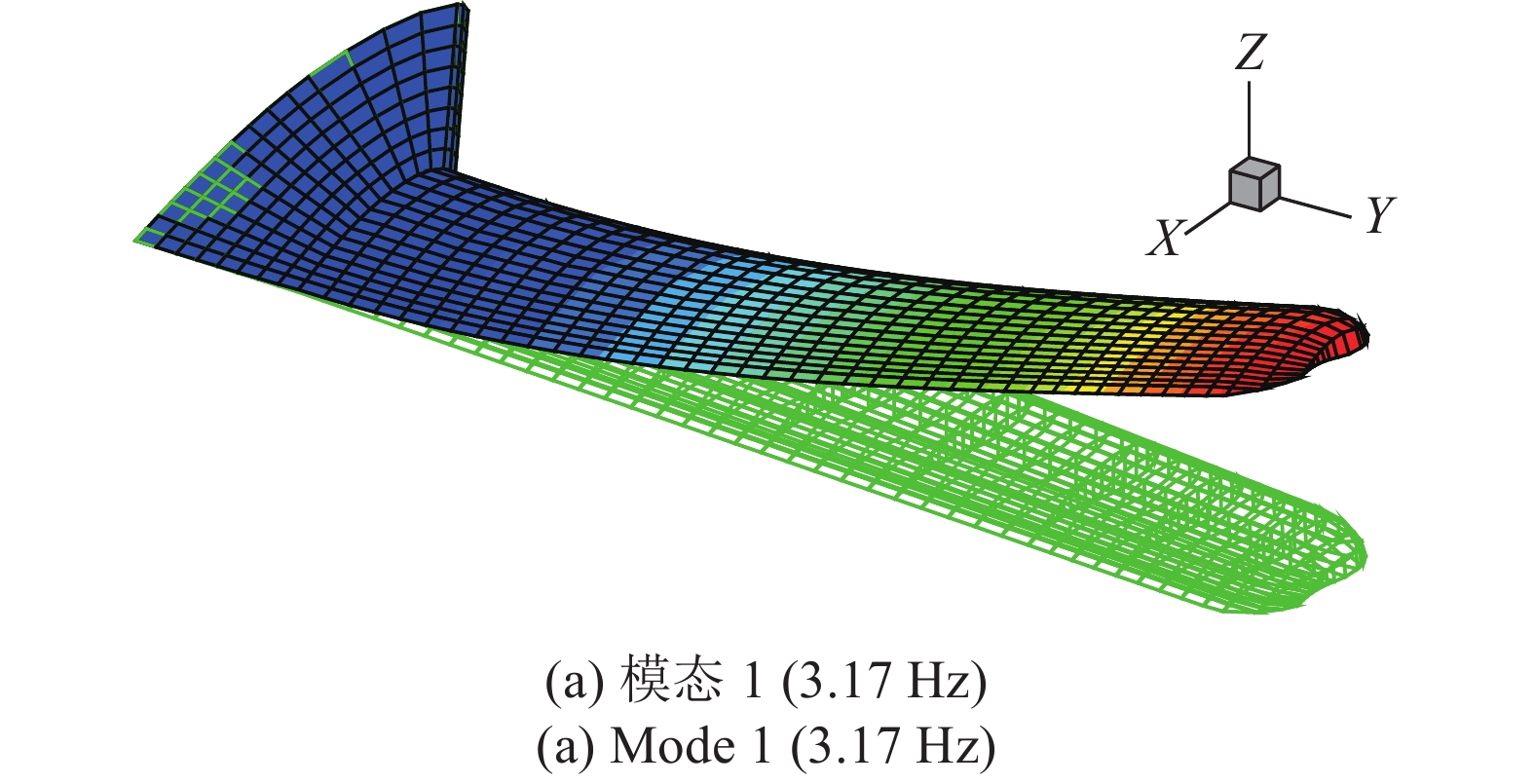
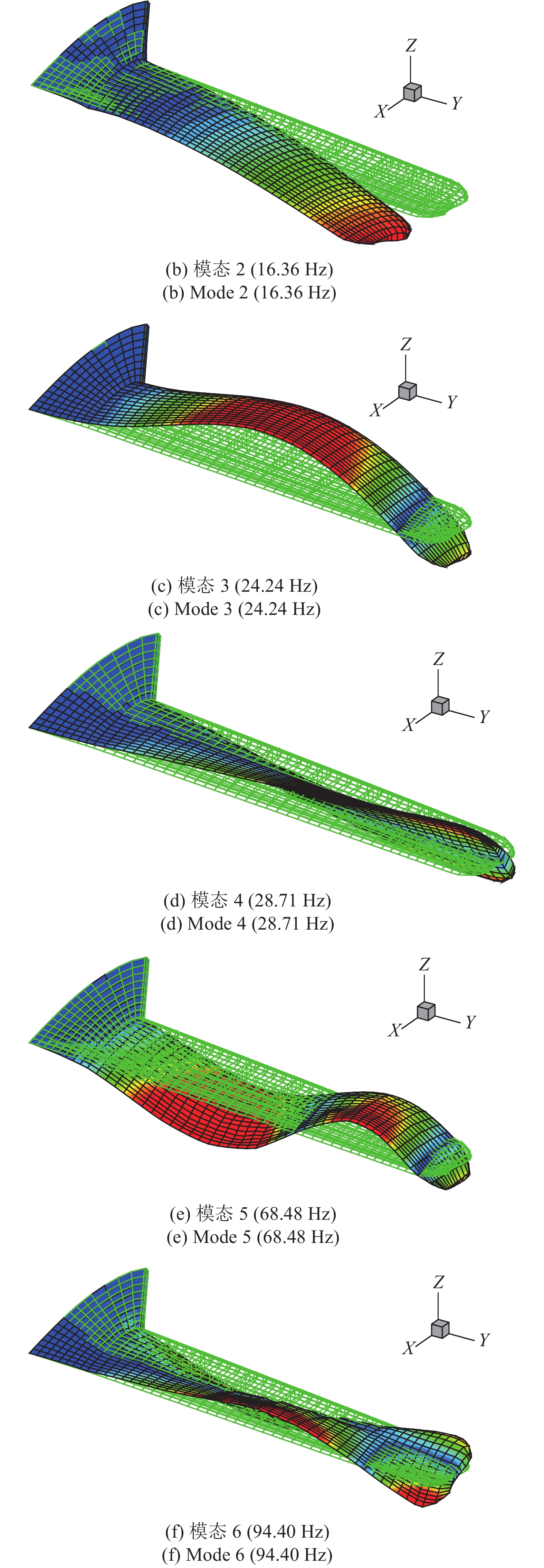
机翼结构的边界条件为翼根固支. 表1给出了

表
1
变后掠翼的前6阶固有模态(

Table
1.
The first six natural modes (

table_type1 ">
| No. | Frequency/Hz | Mode shape |
| mode 1 | 3.17 | 1st vertical bending |
| mode 2 | 16.36 | 1st in-plane bending |
| mode 3 | 24.24 | 2nd vertical bending |
| mode 4 | 28.71 | 1st torsion |
| mode 5 | 68.48 | 3rd vertical bending |
| mode 6 | 94.40 | 2nd torsion |
下载: 导出CSV
|显示表格
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-3-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-3-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure3-1" />
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
变后掠翼的前6阶固有振型(

Figure
3.
The first six mode shapes of the variable-sweep wing (
 下载:
下载: 全尺寸图片
幻灯片
根据前述的结构参数化建模方案, 任意后掠角下的有限元模型都可以方便地利用NASTRAN生成. 建模的结果包含结构整体质量矩阵、刚度矩阵、固有模态矩阵以及结点坐标等模型信息. 这些数据将在自编程序中进一步处理生成机翼的气动弹性模型. 在后掠角0° ~ 60°的变化范围内, 每隔

表
2
不同后掠角下机翼的前6阶固有频率
Table
2.
The first six order natural frequencies of the wing at different swept angles
table_type2 ">
| χ/(°) | 1st/Hz | 2nd/Hz | 3rd/Hz | 4th/Hz | 5th/Hz | 6th/Hz |
| 0 | 3.19 | 16.31 | 24.17 | 28.83 | 66.79 | 95.07 |
| 5 | 3.18 | 16.40 | 24.26 | 28.69 | 67.27 | 94.56 |
| 10 | 3.16 | 16.33 | 24.22 | 28.76 | 67.53 | 94.47 |
| 15 | 3.14 | 16.09 | 24.04 | 29.08 | 67.54 | 94.77 |
| 20 | 3.10 | 15.68 | 23.76 | 29.61 | 67.29 | 95.33 |
| 25 | 3.06 | 15.10 | 23.39 | 30.33 | 66.79 | 95.69 |
| 30 | 3.01 | 14.36 | 22.96 | 31.23 | 66.09 | 94.42 |
| 35 | 2.95 | 13.48 | 22.48 | 32.28 | 65.21 | 90.53 |
| 40 | 2.89 | 12.48 | 21.97 | 33.50 | 64.19 | 84.96 |
| 45 | 2.82 | 11.36 | 21.43 | 34.89 | 63.04 | 78.34 |
| 50 | 2.75 | 10.16 | 20.86 | 36.45 | 61.78 | 70.92 |
| 55 | 2.67 | 8.90 | 20.25 | 38.19 | 60.44 | 62.84 |
| 60 | 2.59 | 7.60 | 19.62 | 40.12 | 54.28 | 59.04 |
下载: 导出CSV
|显示表格
2.
固定后掠角下的气动弹性模型
采用基于偶极子网格法(doublet lattice method, DLM)的非定常气动力模型[24]. DLM将机翼视为无厚度升力面, 并将升力面划分为若干个与来流方向平行的空气动力网格, 如图4所示. 与结构有限元模型的参数化建模方法类似, 在建立非定常气动模型时, 仅在

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
变后掠翼在不同后掠角下的空气动力网格
Figure
4.
Aerodynamic boxes on the lifting surface of the variable-sweep wing
下载: 全尺寸图片
幻灯片
根据DLM模型计算得到升力面的空气动力影响系数(aerodynamic influence coefficient, AIC)矩阵, 根据非穿透边界条件建立简谐运动情况下全部气动网格上的压力系数与网格控制点处无量纲下洗速度之间的关系. 然后通过样条插值将非定常气动力等效到结构结点上. 变后掠翼的气动弹性方程可写为如下形式
$$ {{boldsymbol{M}}_s}{{boldsymbol{ddot x}}_s} + {{boldsymbol{C}}_s}{{boldsymbol{ddot x}}_s} + {{boldsymbol{K}}_s}{{boldsymbol{x}}_s} = {{boldsymbol{f}}_s} + {{boldsymbol{f}}_g} $$  | (1) |
式中,






$$ {{boldsymbol{f}}_s} = {q_infty }mathop {boldsymbol{G}}nolimits_{ks}^{text{T}} {{boldsymbol{S}}_{kj}}mathop {boldsymbol{A}}nolimits_{{ m{aic}}}^{ - 1} (k,{M_infty }){{boldsymbol{D}}_{jk}}(k){{boldsymbol{G}}_{ks}}{{boldsymbol{x}}_s} $$  | (2) |
$$ {{boldsymbol{f}}_g} = {q_infty }mathop {boldsymbol{G}}nolimits_{ks}^{text{T}} {{boldsymbol{S}}_{kj}}mathop {boldsymbol{A}}nolimits_{{ m{aic}}}^{ - 1} (k,{M_infty }){{boldsymbol{varPhi }}_{jg}}(k)frac{{{w_g}}}{{{U_infty }}};; $$  | (3) |
式中,






m{aic}}}^{}$




引入模态坐标变换

$$ {{boldsymbol{M}}_{hh}}{boldsymbol{ddot xi }} + {{boldsymbol{C}}_{hh}}{boldsymbol{dot xi }} + {{boldsymbol{K}}_{hh}}{boldsymbol{xi }} = {q_infty }{{boldsymbol{Q}}_{hh}}{boldsymbol{xi }} + {q_infty }{{boldsymbol{Q}}_{hg}}frac{{{w_g}}}{{{U_infty }}} $$  | (4) |
式中,







$$ left. begin{array}{l}{{boldsymbol{M}}_{hh}} = mathop {boldsymbol{varPhi }}nolimits_h^{text{T}} {{boldsymbol{M}}_s}{{boldsymbol{varPhi }}_h} hfill {{boldsymbol{C}}_{hh}} = mathop {boldsymbol{varPhi }}nolimits_h^{text{T}} {{boldsymbol{C}}_s}{{boldsymbol{varPhi }}_h} hfill {{boldsymbol{K}}_{hh}} = mathop {boldsymbol{varPhi }}nolimits_h^{text{T}} {{boldsymbol{K}}_s}{{boldsymbol{varPhi }}_h} hfill end{array} ight} $$  | (5) |
$$ {{boldsymbol{Q}}_{hh}} = mathop {boldsymbol{varPhi }}nolimits_h^{text{T}} mathop {boldsymbol{G}}nolimits_{ks}^{text{T}} {{boldsymbol{S}}_{kj}}mathop {boldsymbol{A}}nolimits_{{ m{aic}}}^{ - 1} (k,{{boldsymbol{M}}_infty }){{boldsymbol{D}}_{jk}}(k){{boldsymbol{G}}_{ks}}{{boldsymbol{varPhi }}_h} $$  | (6) |
$$ {{boldsymbol{Q}}_{hg}} = mathop {boldsymbol{varPhi }}nolimits_h^{text{T}} mathop {boldsymbol{G}}nolimits_{ks}^{text{T}} {{boldsymbol{S}}_{kj}}mathop {boldsymbol{A}}nolimits_{{ m{aic}}}^{ - 1} (k,{{boldsymbol{M}}_infty }){{boldsymbol{varPhi }}_{jg}}(k) $$  | (7) |
式(4)中的GAF矩阵为频域形式, 如果进行时域气动弹性分析, 可以通过有理函数拟合(rational functional approximation, RFA)技术将GAF矩阵转换至拉氏域, 然后再转化到时域. 然而, 当前固定后掠角下的气动弹性模型并不适合在时变角度下做仿真计算, 因为对每个时间步, 在线计算结构模态矩阵和非定常气动力矩阵是非常低效的. 下一节将提出一种基于当地气动弹性模型的插值建模技术, 其优点是能够快速获得参数空间内任意一点的气动弹性模型.
3.
基于当地模型插值的参变系统建模方法
变后掠翼的气动弹性分析和响应计算均可在LPV系统的框架内进行, 当地建模技术是构造LPV系统的一种实用且高效的建模手段[26]. 首先对参数变化空间进行离散处理, 然后在各离散参数点处分别建立一系列线性时不变(LTI)系统模型, 最后对这些LTI模型进行插值, 从而快速获得参数空间内任意一点处的LTI模型. 在参数慢变的假设下, LTI模型中缺少的动态参数依赖部分可以忽略不计[27], 本文采用此假设. 将插值步骤融入仿真过程, 即可对可变后掠翼进行慢时变响应计算.
然而, 使用当地建模技术时, 各当地模型必须事先处理为一致的形式, 否则将得到错误的插值后系统. 考察式(4)给出的气动弹性方程, 各矩阵均与结构模态矩阵



3.1
模态匹配和对齐
为获得后掠翼模态数据, 在


$$ {{boldsymbol{K}}_{s, l}}{{boldsymbol{varPhi }}_{h, l}} = {{boldsymbol{M}}_{s, l}}{{boldsymbol{varPhi }}_{h, l}}{boldsymbol{varOmega }}_{h, l}^2 , ;; l = 1,2,; cdots,;{n_t} $$  | (8) |
式中,


一般情况下, 特征值和特征向量通常简单地按照大小排列顺序. 当存在模态交叉时, 同一阶次的模态振型由于模态性质不同而不能直接用来插值. 插值应该在同一条模态分支上进行, 而同一条模态分支上的模态具有相似的振动形态, 因此对相邻参数点下的固有频率和振型进行比较, 有望将



$$ begin{split} &{d_{i,j}} = ;|{omega _{i,l - 1}} - {omega _{j,l}}| (1 - sqrt {{{MA}}{{{C}}_{i,j}}} ), &qquad i,;j = 1,2,; cdots,;{n_h} end{split} $$  | (9) |
式中,







$$ {{MA}}{{{C}}_{i,j}} = frac{{|{boldsymbol{varphi }}_{i, l - 1}^{text{T}}{{boldsymbol{varphi }}_{j, l}}{|^2}}}{{({boldsymbol{varphi }}_{i, l - 1}^{text{T}}{{boldsymbol{varphi }}_{i, l - 1}}) cdot ({boldsymbol{varphi }}_{j,l}^{text{T}}{{boldsymbol{varphi }}_{j, l}})}} $$  | (10) |
式中,




距离度量式(9)使用了两个固有频率之间的直线距离, 并用MAC加权. MAC在区间[0, 1]之间取值, 其值越大则表明固有振型之间的线性相关性越高. 假设



$$ left.begin{array}{l} {boldsymbol{V}_{l - 1}} = { {omega _{1,l}} ,;{omega _{2,l}}, cdots {omega _{{n_h}, l - 1}}} {boldsymbol{V}_l} = { {omega _{1, l}},;{omega _{2, l}} , cdots {omega _{{n_h}, l}}}end{array} ight} $$  | (11) |
定义边集






为了保证数值连续变化, 固有振型向量的正负符号问题也应顺带处理. 将重新排列后的固有振型向量调整为


$${c_{i,j}} = {text{sign(}}{boldsymbol{varphi }}_{i, l - 1}^{text{T}}{{boldsymbol{varphi }}_{i, l}}{text{),}};; i = 1,2,; cdots,;{n_h} $$  | (12) |
通过模态匹配与对齐, 能够保证式(4)中建立的气动弹性模型在全部后掠角下都有一致的形式.
3.2
一致的有理函数表达式
另一可能引起模型不一致的因素是非定常气动力的有理函数近似. 为获得时域的气动弹性方程, 需要通过RFA技术将频域气动力扩展至Laplace域. RFA技术利用一系列减缩频率下的GAF数据拟合特定形式的有理函数, 其中最常用是下式给出的最小状态近似(minimum state approximation, MSA)
$$ {boldsymbol{Q}}(p) = {{boldsymbol{A}}_0} + {{boldsymbol{A}}_1}p + {{boldsymbol{A}}_2}{p^2} + {boldsymbol{D}}{(p{boldsymbol{I}} - {boldsymbol{R}})^{ - 1}}{boldsymbol{E}}p $$  | (13) |
式中,








$$ {boldsymbol{D}}{{text{(}}p{boldsymbol{I}} - {boldsymbol{R}}{text{)}}^{ - 1}}{boldsymbol{E}} = {boldsymbol{DT}}{(p{boldsymbol{I}} - {{boldsymbol{T}}^{ - 1}}{boldsymbol{RT}})^{ - 1}}{{boldsymbol{T}}^{ - 1}}{boldsymbol{E}} $$  | (14) |
在建立可变后掠角气动弹性系统模型时, 拟合后的系数矩阵的不唯一性会造成当地气动力模型之间的不一致, 从而导致插值得到的系统是错误的. 由于







考虑相邻两个后掠角






$$ {{boldsymbol{T}}_l} = {text{diag(}}{t_{1, l}} ,{t_{2, l}}, cdots, {t_{{n_a}, l}}) $$  | (15) |
式中,


$$ {t_{i, l}} = {text{sign}}({boldsymbol{d}}_{i, l - 1}^{text{T}}{{boldsymbol{d}}_{i, l}}) frac{{{{left| {{{boldsymbol{d}}_{i, l - 1}}} ight|}_2}}}{{{{left| {{{boldsymbol{d}}_{i, l}}} ight|}_2}}}{text{,}} ;; i = 1,2,; cdots,;{n_a} $$  | (16) |
式中,










如后掠角和马赫数均为可变参数, 此时RFA原始数据在二维参数网格上生成. 这种情况下一致性处理方法应该是: 首先固定第一个马赫数, 按照后掠角顺序依次调整系数矩阵; 随后固定各个后掠角, 再按照马赫数的顺序使用相同的方法依次调整系数矩阵.
经过模态匹配的气动弹性方程式(4)与使用一致RFA表达的式(13)相结合, 再按照传统气动伺服弹性系统的构造方式, 最终生成如下时域状态空间系统方程[25]
$$ {{boldsymbol{dot x}}_{ae}} = {{boldsymbol{A}}_{ae}}{text{(}}{boldsymbol{ ho }}{text{)}}{{boldsymbol{x}}_{ae}} + {{boldsymbol{B}}_{aw}}({boldsymbol{ ho }}){{boldsymbol{tilde w}}_g} $$  | (17) |
$$ {{boldsymbol{y}}_{ae}} = {{boldsymbol{C}}_{ae}}{text{(}}{boldsymbol{ ho }}{text{)}}{{boldsymbol{x}}_{ae}} + {{boldsymbol{D}}_{aw}}({boldsymbol{ ho }}){{boldsymbol{tilde w}}_g} $$  | (18) |
式中, 参数向量
ho }} $









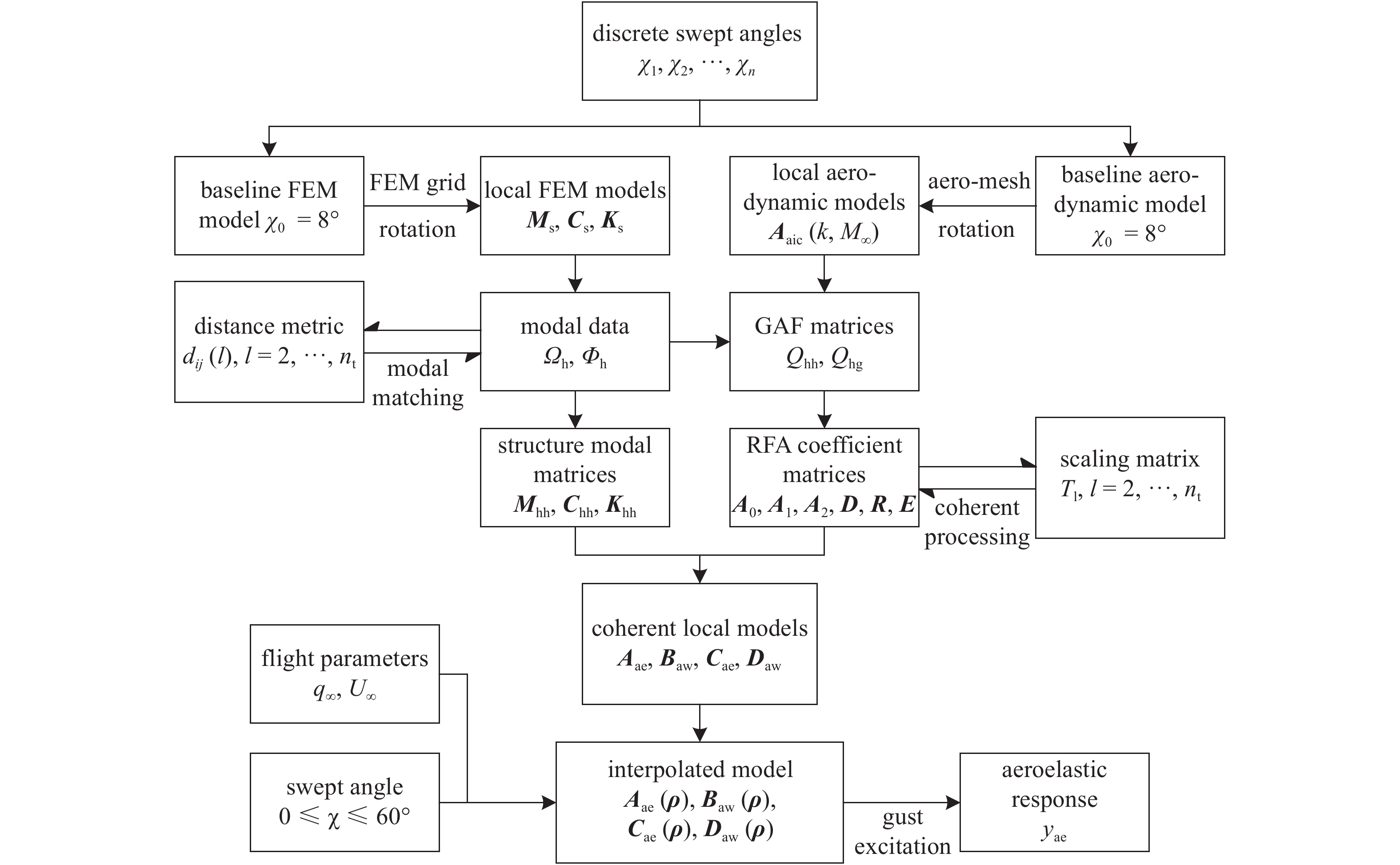
利用本文给出的模态匹配和RFA系数处理方法, 可解决变后掠翼当地气动弹性模型中可能出现的不一致性问题. 不论是后掠角还是飞行参数的改变, 各当地系统矩阵都能保证随参数连续变化. 图5总结了本文提出了基于当地建模技术的变后掠翼参变气动弹性系统的建模流程. 对一致的当地模型进行插值, 能够快速获取任意后掠角下的状态空间矩阵, 大大提高时变气动弹性分析与响应计算的效率.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-5.jpg'" class="figure_img
figure_type2 ccc " id="Figure5" />
图
5
变后掠翼的参数化气动弹性系统建模流程图
Figure
5.
The flow chat of the parameter-varying aeroelastic modeling for a variable-sweep wing
下载: 全尺寸图片
幻灯片
4.
参变气动弹性建模方法的验证
4.1
一致性验证
为了利用当地建模技术建立变后掠翼的参变气动弹性模型, 首先在0° ~ 60°的后掠角范围内每间隔

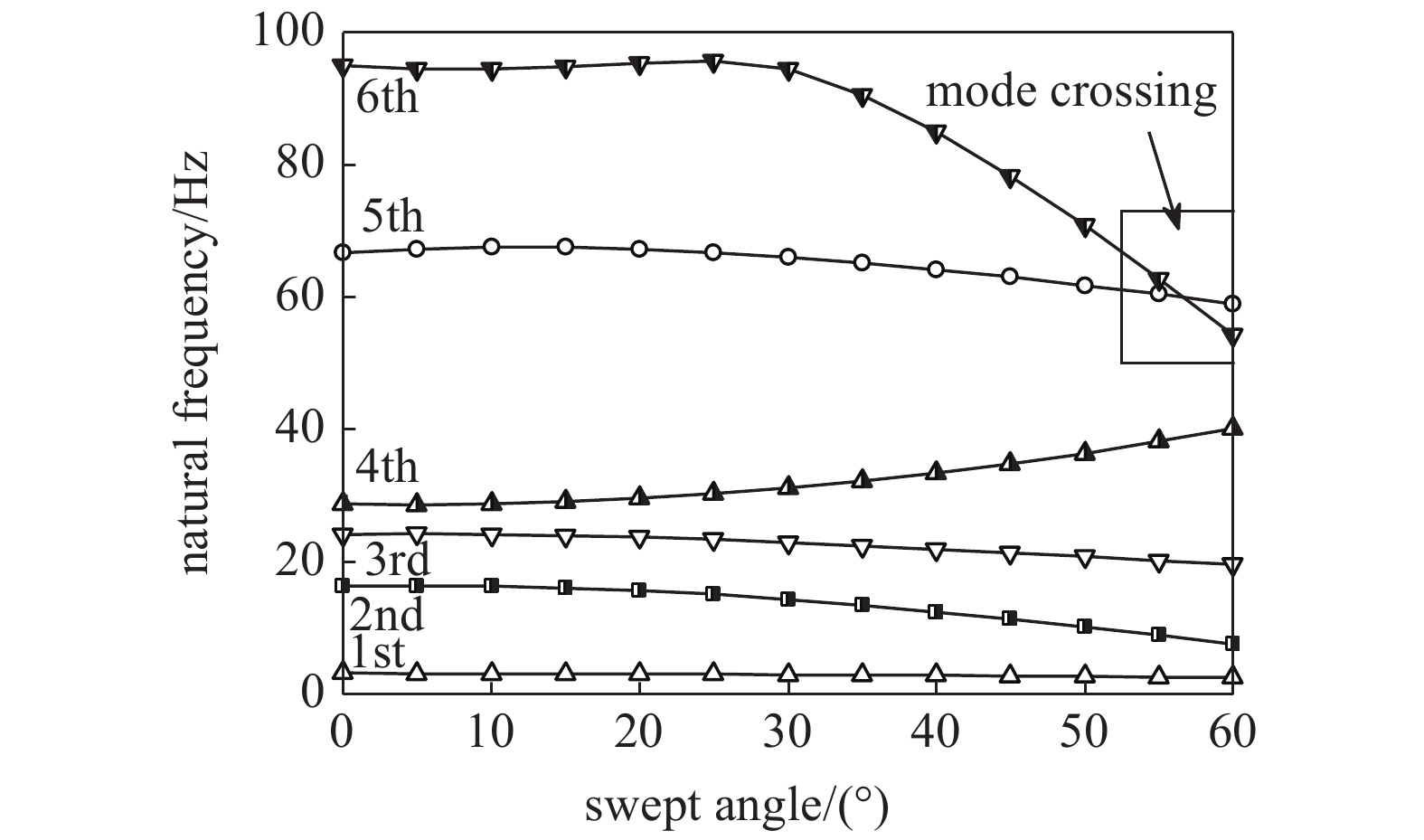
图6给出了经过模态匹配与排序后, 变后掠翼的前6阶固有频率随后掠角的变化规律. 可以看出, 在




 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
前6阶固有频率随后掠角的变化规律
Figure
6.
The first six natural frequencies vs. the swept angles
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
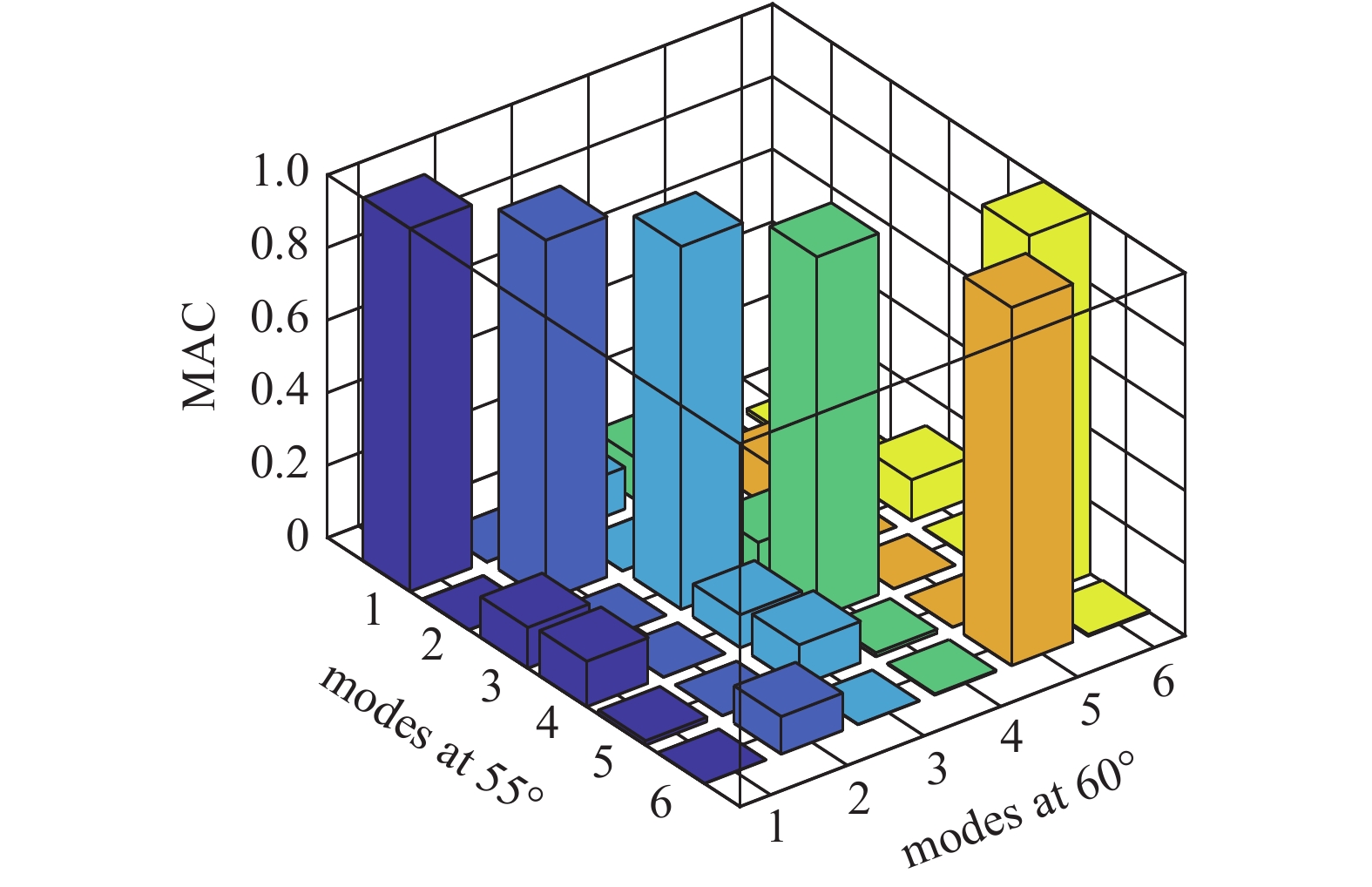
MAC值(55°和60°后掠角)
Figure
7.
The MAC values for 55° and 60° swept angles
下载: 全尺寸图片
幻灯片
为了建立时域状态空间模型, 接下来对式(4)中的GAF矩阵进行有理函数拟合. 假设来流为不可压流动, GAF矩阵在0.0 ~ 1.5范围内的16个减缩频率处计算. 使用MS方法拟合得到式(13)所示的RFA表达式, 气动力滞后根由以下经验公式[32] 得到
$$ {R_i} = - 1.7{k_{max }}{left( {frac{i}{{{n_a} + 1}}} ight)^2},;; i = 1,2,; cdots,;{n_a} $$  | (19) |
式中,

生成GAF矩阵时使用了相匹配的结构模态, 然而MS算法并不保证各参数点下的RFA系数矩阵具有一致性. 如图8所示, 初始的RFA系数矩阵




 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
不一致的RFA系数矩阵随后掠角的变化
Figure
8.
The incoherent RFA coefficients vs. the swept angles
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
一致性处理后RFA系数矩阵随后掠角的变化
Figure
9.
The coherent RFA coefficients vs. the swept angles
下载: 全尺寸图片
幻灯片
匹配的结构模态和一致的RFA表达式确保在构建状态空间模型时, 各当地系统矩阵能够随参数连续变化, 因此整个参数空间内任意点处的时域方程都能通过对当地系统模型的插值得到. 为了验证插值模型的准确性, 对后掠翼在突风扰动下的气动弹性响应进行计算. 1?cos离散突风是工程中常用的标准模型, 当飞行器以速度

$$ {w_g}(t) = left{ begin{aligned} &{frac{{{{bar w}_g}}}{2}left[1 - cos (2{text{π}}{f_g}t) ight],;0 leqslant t leqslant frac{{{L_g}}}{{{U_infty }}}} &{0,;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;t > frac{{{L_g}}}{{{U_infty }}}} end{aligned} ight. $$  | (20) |
式中,



在海平面大气环境下, 来流速度为












 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
后掠翼的1?cos离散突风响应(

Figure
10.
1?cos gust response of wing at the swept angle
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
后掠翼的1?cos离散突风响应(

Figure
11.
1?cos gust response of wing at the swept angle
 下载:
下载: 全尺寸图片
幻灯片
4.2
颤振分析
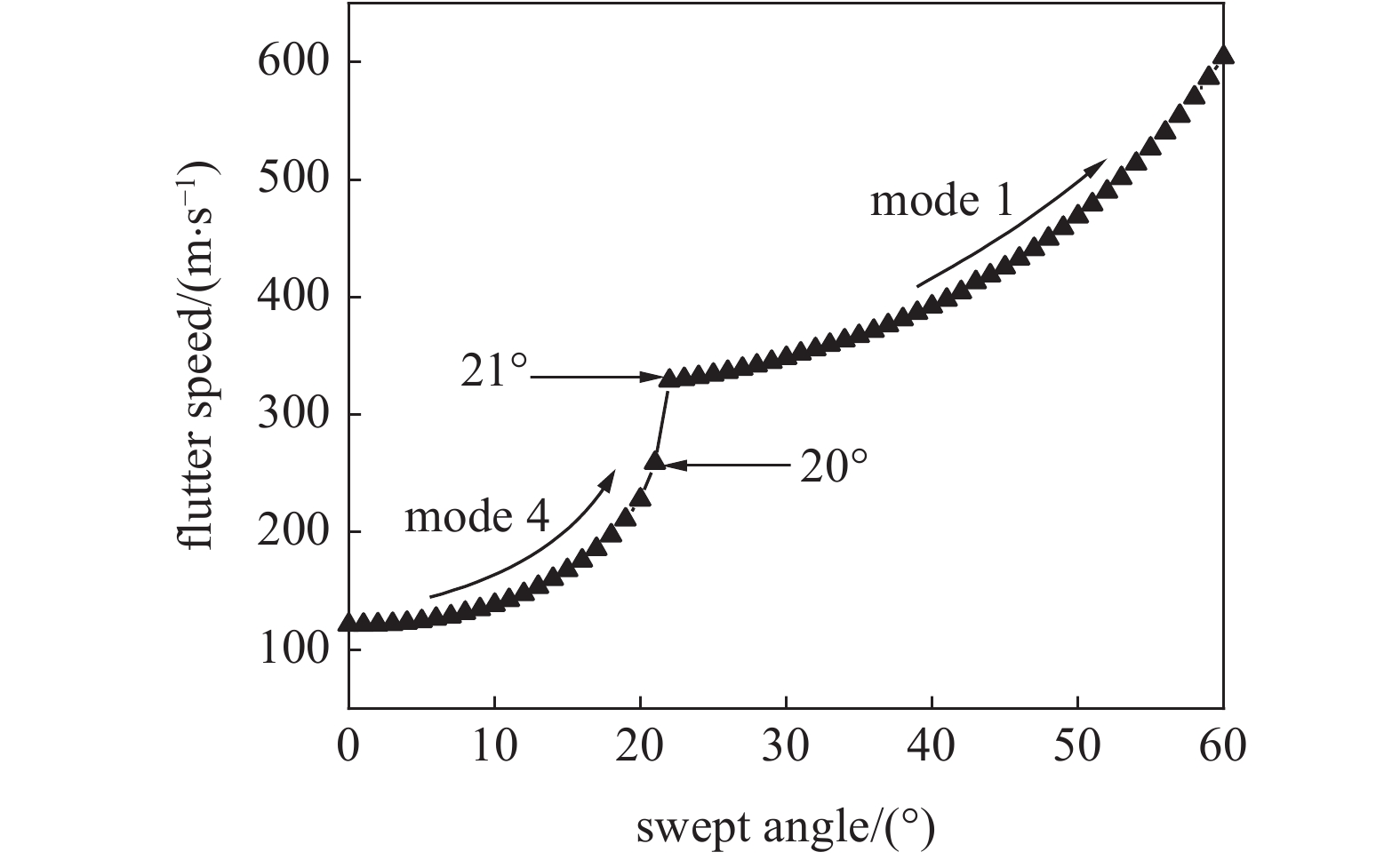
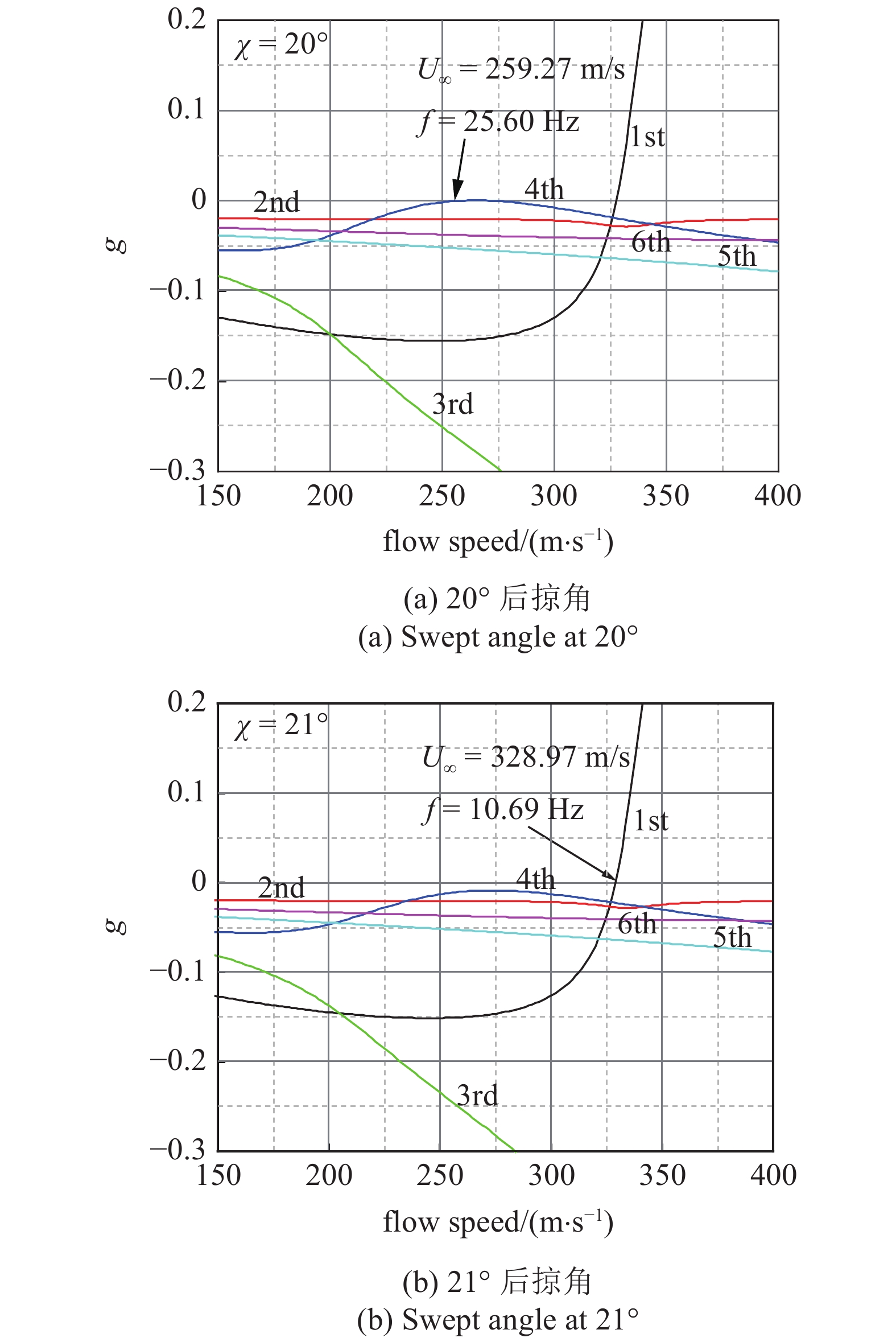
图12给出了固定马赫数、不同后掠角下的颤振速度分布, 随着后掠角的增加, 机翼的颤振速度不断增加. 当机翼后掠角大于

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
可变后掠翼颤振速度随后掠角的变化
Figure
12.
Flutter speed vs. swept angle
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
不同后掠角下机翼的颤振分析
Figure
13.
Flutter analyses of the wing at different swept angle
下载: 全尺寸图片
幻灯片
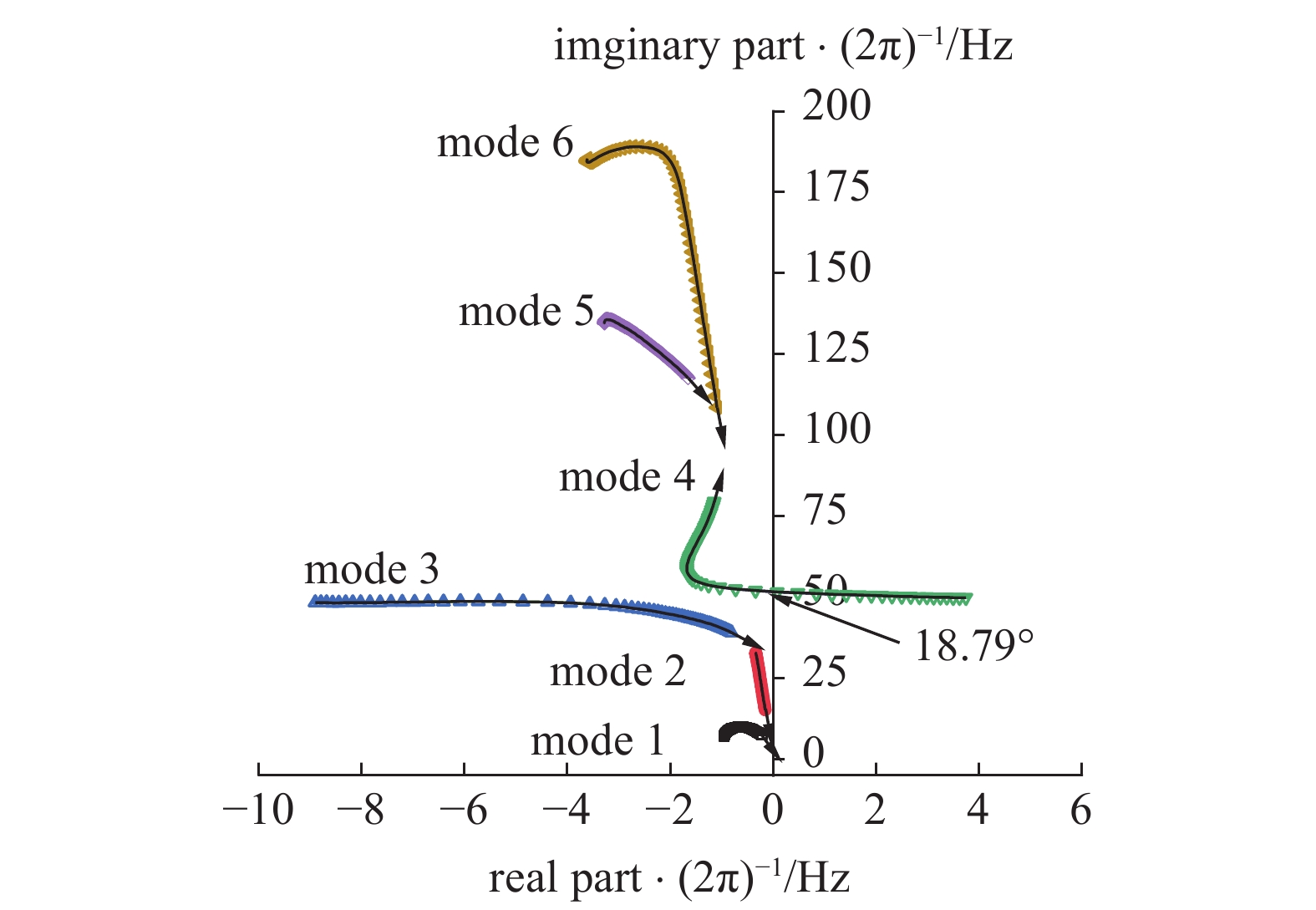
为研究不同后掠角下系统特征值的变化规律, 进行了固定马赫数(


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-14.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-14.jpg'" class="figure_img
figure_type1 bbb " id="Figure14" />
图
14
可变后掠翼在不同后掠角下的根轨迹
Figure
14.
Root locus of the wing at various swept angles
下载: 全尺寸图片
幻灯片
4.3
时域仿真
为进一步分析可变后掠翼在变后掠过程中的时变动态特性, 假定机翼后掠角的变化遵循如下规律
$$ chi (t) = {chi _m}left(frac{t}{{{T_m}}} - frac{1}{{2{text{π}}}}sin frac{{2{text{π}}t}}{{{T_m}}} ight){text{,}} ;;; 0 leqslant t leqslant {T_s} $$  | (21) |
式中,


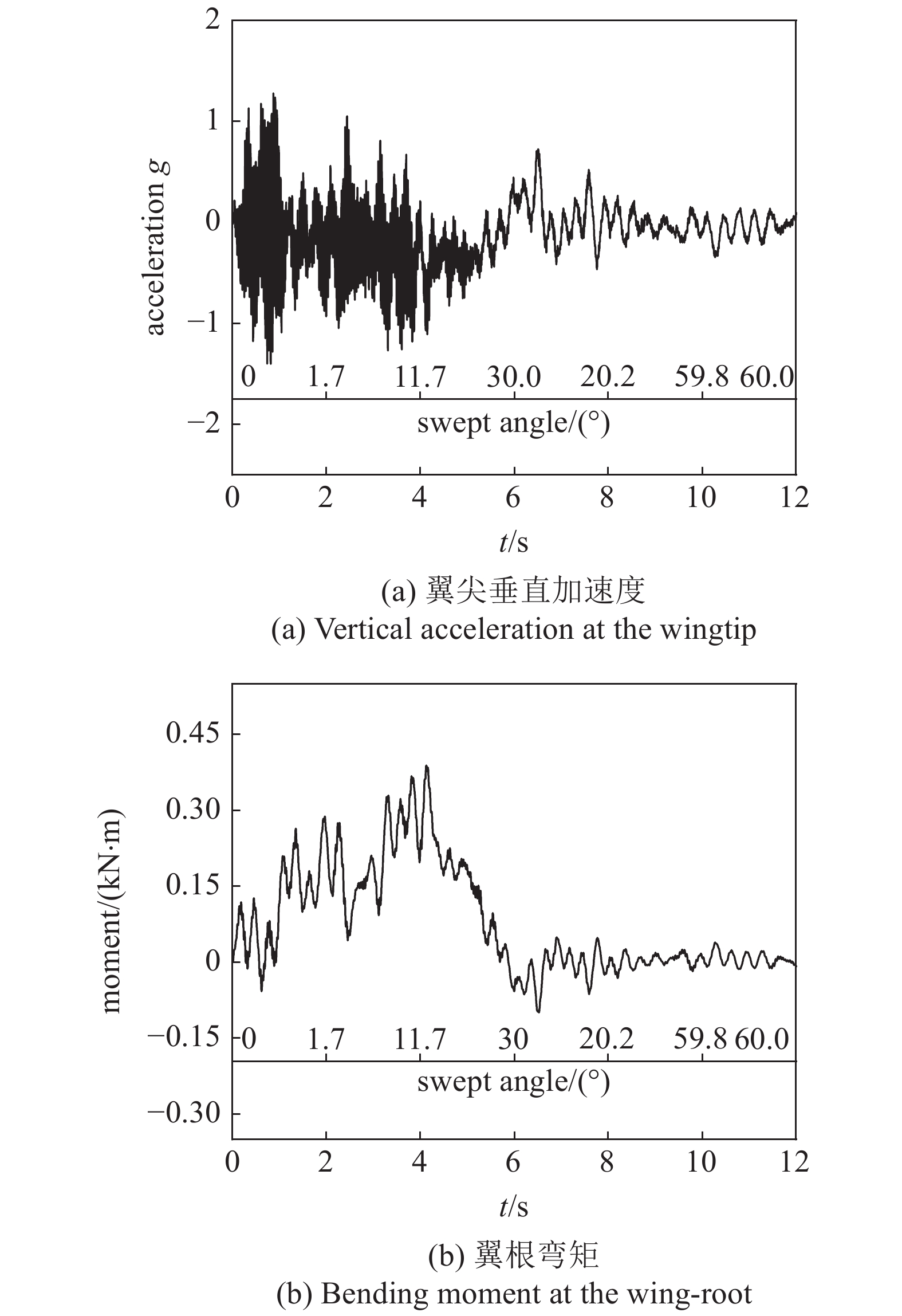
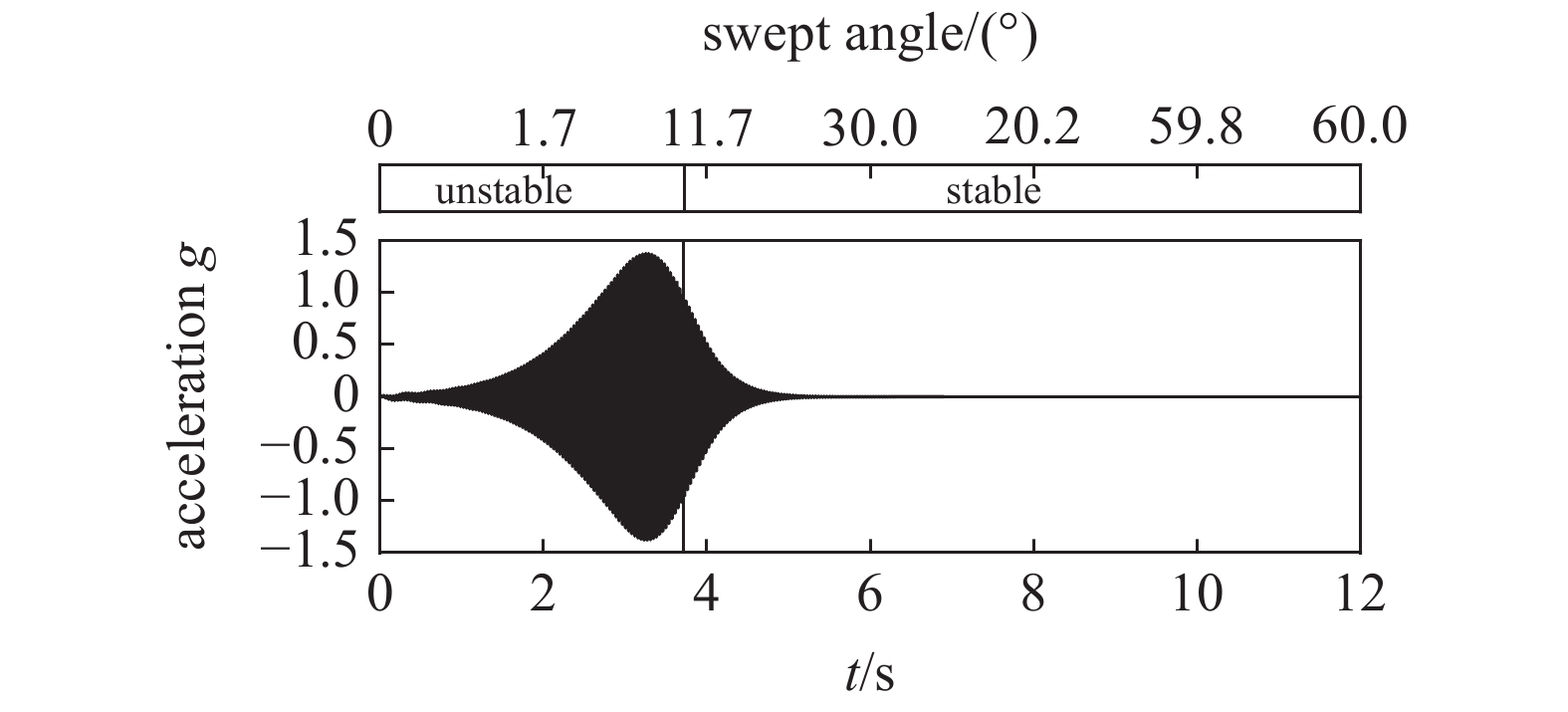
以Dryden连续突风作为扰动激励, 图15给出了飞行马赫数为0.35, 巡航速度为120 m/s时, 机翼连续改变后掠角过程中翼尖加速度和翼根弯矩的时间历程, 其中连续突风尺度


 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-15.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-15.jpg'" class="figure_img
figure_type1 bbb " id="Figure15" />
图
15
机翼变后掠过程中的突风响应
Figure
15.
Gust responses of the variable-sweep wing during the morphing process
下载: 全尺寸图片
幻灯片
由图12可以看出可变后掠翼的最小颤振速度发生在后掠角为

选取了飞行马赫数为0.35以及130 m/s的巡航速度来研究变后掠翼变形过程中的时变气动弹性响应. 如图16所示. 当后掠角小于8.27°时机翼处于气动弹性失稳状态, 在一个较小的扰动下结构便发生了谐振荡, 且不断从来流中获取能量导致振幅不断变大; 而当后掠角大于8.27°时机翼结构的颤振速度增加, 稳定性得到提升, 结构进入气动弹性稳定状态, 振幅不断下降.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-16.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/11//lxxb2021-275-16.jpg'" class="figure_img
figure_type1 bbb " id="Figure16" />
图
16
后掠翼变形过程中的气动弹性响应
Figure
16.
Aeroelastic responses of the variable-sweep wing during the morphing process
下载: 全尺寸图片
幻灯片
5.
结 论
本文针对可变后掠翼, 提出了一种参变气动弹性建模的实用方法. 通过研究分析, 可以得到如下结论.
(1)变后掠翼的气动弹性建模问题涉及参变系统的建模技术. 对已获得的参变空间内的若干当地气动弹性模型进行插值, 是参变气动弹性系统建模的高效而实用的方法.
(2)同一系统的状态空间实现是不唯一的, 这导致各当地气动弹性模型可能存在不一致性, 直接对这些不一致的当地气动弹性模型插值, 将得到新参数点下错误的气动弹性模型. 因此, 对当地模型进行一致性处理至关重要.
(3)当地气动弹性模型的不一致性来源于结构和气动两方面. 本文首先利用模态跟踪技术对结构模态进行匹配和对齐, 解决了结构动力学方面的不一致性问题; 在气动方面, 在一致的结构模态基础之上建立非定常空气动力矩阵, 然后对RFA表达式中的系数矩阵进行合理的缩放处理, 解决了空气动力系数矩阵的不一致问题. 这样, 最终的当地状态空间气动弹模型便具有良好的一致性, 任意参数下的气动弹性模型可通过当地模型的插值快速获得, 大大提高了系统稳定性分析和慢时变响应计算的效率.
(4)本文研究为采用频域气动模型的参变系统的气动弹性建模, 提供了一种有效的解决方案. 本文方法不仅使适用于变后掠情形, 也适用于其他变体方式, 具有一定的普适性.
(5)慢时仿真结果表明, 机翼在变后掠过程中, 其气动弹性稳定性和响应特性均发生很大变化, 这些变化规律对变后掠翼飞行器的设计具有重要意义.
