引言
深入探索多孔介质中多相流动和固体变形特征对精准认识地下资源开发利用, 例如石油勘探开发、煤层气和页岩气开采、二氧化碳地质封存等领域, 具有重要的工程意义[1-4]. 在流体输送过程中局部压力和饱和度梯度下的渗流作用改变了孔隙结构特征, 打破了储层内部的水力平衡; 固体空间结构的变化影响了储层内部流体的运移路径和流通能力, 具体表现为多孔介质孔隙度和渗透率等物性参数的动态响应. 发展和建立两相渗流与固体变形耦合模型及其相应的数值方法是准确描述和阐明储层内水力行为的有效手段[5-7].
针对两相渗流和固体变形耦合模型的数值方法主要包括有限元法[8-10]、有限体积法[11-12]以及混合计算方法[13-14]等. 对于两相流问题的离散和数值求解, 传统有限元能够确保流体域内整体的质量平衡, 但是无法实现流体在跨越单元间的局部质量平衡, 因此不适用于求解对流占主导的非线性不混溶问题; 有限体积法在确保局部流量平衡的同时, 具有较高的计算效率, 因此在工业界和工程尺度模拟中得到了广泛应用. 在通常情况下, 有限体积方法的计算结果仅能满足低阶有效精度; 混合计算方法是指对流体和力学控制方程分别利用不同的数值方法进行求解, 该方法集成了各种数值方法的优势. Rutqivst[15]在耦联流体软件TOUGH2和固体变形软件FLAC3D的基础上, 开发了在油气、地热、可燃冰开采以及二氧化碳地质封存等领域广泛使用的TOUGH-FLAC耦合模拟器. 在此模拟器中, 负责流体计算的TOUGH2软件采用的是有限体积法, FLAC3D采用有限差分法计算固体变形, 此方法在网格划分和数据传递效率等方面具有一定的局限性.
间断伽辽金有限元(discontinuous Galerkin finite element method, DG-FEM)结合了有限体积与有限元两种方法的优点, 具有高阶精度和局部单元物理守恒性的特点, 容易实现局部网格加密和各单元多项式的单独选取[16-19]. 近些年来, DG-FEM在流体和弹性力学领域得到了广泛的关注和持续的发展[20-22]. Klieber和Riviere[23]在解耦两相渗流微分方程组的基础上, 提出了不可压缩两相流自适应间断有限元方法. Epshteyn和Rivière[24]提出了多孔介质不可压缩两相流完全隐式方程的不连续伽辽金方法, 该方法在结构化和非结构化网格计算中都具有较好的鲁棒性. 李子然和吴长春[25]、陈韵骋等[26]建立了基于线弹性力学问题的局部间断有限元方法. 在流固耦合方面, Liu等[27-28]提出了连续和间断伽辽金耦合框架, 利用自适应加罚方法提高间断伽辽金有限元方法在模拟大型多孔弹性问题时的适用性和计算效率, 并将此方法推广至多孔介质水力压裂模拟中. 目前关于间断伽辽金有限元方法在计算可压缩两相流固模型方面的研究鲜有报道, 还有待进一步深入研究.
基于上述认识, 本文首先建立可压缩两相流固耦合控制方程, 其中包括考虑毛细压力和重力作用的可压缩两相渗流方程以及线性多孔弹性方程. 在此基础上, 推导出流固耦合方程的间断伽辽金弱形式; 然后, 通过一维Terzaghi流固问题验证模型的准确性; 最后, 分别开展二维平面应变条件下和考虑重力效应的三维流固数值算例, 分析流体压力、饱和度以及固体应力、位移的分布特征, 探讨加罚因子对模拟结果的影响.
1.
两相流固耦合控制方程
1.1
两相渗流方程
假设模型中湿润相和非湿润相为不混溶流体, 两者在多孔介质中的流速满足达西定律. 在考虑毛细压力、重力效应和固体变形的基础上, 等温可压缩两相渗流控制方程可表示为[2, 29]
$$begin{split}&phi {S_{{ m{nw}}}}{ ho _{{ m{nw}}}}{C_{{ m{nw}}}}frac{{partial {p_{{ m{nw}}}}}}{{partial t}} - phi { ho _{{ m{nw}}}}frac{{partial {S_{ m{w}}}}}{{partial t}} + {S_{{ m{nw}}}}{ ho _{{ m{nw}}}}frac{{partial {varepsilon _{ m{v}}}}}{{partial t}} + &qquadnabla cdot left[ { - { ho _{{ m{nw}}}}frac{{{boldsymbol{k}}{k_{{ m{rnw}}}}}}{{{mu _{{ m{nw}}}}}}left( {nabla {p_{{ m{nw}}}} + { ho _{{ m{nw}}}}{boldsymbol{g}}} ight)} ight] = {Q_{{ m{nw}}}}end{split}$$  | (1) |
$$begin{split}&phi {S_{ m{w}}}{ ho _{ m{w}}}{C_{ m{w}}}frac{{partial {p_{{ m{nw}}}}}}{{partial t}} + left( {phi { ho _{ m{w}}} - phi {S_{ m{w}}}{ ho _{ m{w}}}{C_{ m{w}}}left| {{p_{ m{c}}}} ight|} ight)frac{{partial {S_{ m{w}}}}}{{partial t}}+&qquad {S_{ m{w}}}{ ho _{ m{w}}}frac{{partial {varepsilon _{ m{v}}}}}{{partial t}} + nabla cdot [ - { ho _{ m{w}}}frac{{{boldsymbol{k}}{k_{{ m{rw}}}}}}{{{mu _{ m{w}}}}}(nabla {p_{{ m{nw}}}} - left| {{p_{ m{c}}}} ight|nabla {S_{ m{w}}}+ &qquad { ho _{ m{w}}}{boldsymbol{g}})] = {Q_{ m{w}}}end{split}$$  | (2) |
式中, 下标
m{w}}$

m{n}}{
m{w}} $


ho }_{beta } $





m{r}}beta }$


m{v}} $

m{c}} $

m{c}}
ight| $

为了求解方程, 需要补充如下辅助公式
$$ {S}_{{ m{w}}}+{S}_{{ m{n}}{ m{w}}}=1$$  | (3) |
$${p}_{ m{c}}={p}_{{ m{n}}{ m{w}}}-{p}_{{ m{w}}}={p}_{ m{e}}{left({S}_{ m{e}} ight)}^{-frac{1}{lambda }}$$  | (4) |
$${S}_{ m{e}}=frac{{S}_{{ m{w}}}-{S}_{{ m{r}}{ m{n}}{ m{w}}}}{1-{S}_{{ m{r}}{ m{w}}}-{S}_{{ m{r}}{ m{n}}{ m{w}}}}$$  | (5) |
式中,
m{e}} $

m{e}} $


m{r}}{
m{w}}} $

m{r}}{
m{n}}{
m{w}}} $

此外, 选取Genuchten?Mualem相对渗透率模型描述湿润相和非湿润相的流通能力, 表达式如下所示[30]
$${k_{{ m{rw}}}} = left{ {begin{array}{*{20}{l}}{sqrt {{S_{ m{e}}}} {{left[ {1 - {{left( {1 - {S_{ m{e}}}^{1/omega }} ight)}^omega }} ight]}^2},}&{{ m{if}};{S_{ m{w}}} < 1}{1,}&{{ m{if}};{S_{ m{w}}} geqslant 1}end{array}} ight.$$  | (6) |
$${k_{{ m{rnw}}}} = left{ {begin{array}{*{20}{l}}{1 - {k_{{ m{rw}}}},}&{{ m{if}};{S_{{ m{rnw}}}} = 0}{{{left( {1 - {S_{ m{e}}}} ight)}^2}left( {1 - {S_{ m{e}}}^2} ight),}&{{ m{if}};{S_{{ m{rnw}}}} > 0}end{array}} ight.$$  | (7) |
模型的初始条件为
$$ {p}_{{ m{n}}{ m{w}}}left(x,t=0 ight)={p}_{{ m{n}}{ m{w}}0}$$  | (8) |
$${S}_{{ m{w}}}left(x,t=0 ight)={S}_{{ m{w}}0};;$$  | (9) |
模型中Dirichlet和Neumann边界条件如下所示
$${p}_{{ m{n}}{ m{w}}}left(x,t ight)={p}_{{ m{n}}{ m{w}}}^{ m{b}}$$  | (10) |
$${S}_{{ m{w}}}left(x,t ight)={S}_{{ m{w}}}^{ m{b}}$$  | (11) |
$${boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}={g}_{{ m{n}}{ m{w}}}$$  | (12) |
$$ {boldsymbol{lambda }}_{{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}-left|{p}_{ m{c}} ight|nabla {S}_{{ m{w}}}+{ ho }_{{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}={g}_{{ m{w}}} $$  | (13) |
式中,
m{n}}{
m{w}}}=-{
ho }_{{
m{n}}{
m{w}}}dfrac{{boldsymbol{k}}{k}_{{
m{r}}{
m{n}}{
m{w}}}}{{mu }_{{
m{n}}{
m{w}}}}$

m{w}}}=-{
ho }_{{
m{w}}}dfrac{{boldsymbol{k}}{k}_{{
m{r}}{
m{w}}}}{{mu }_{{
m{w}}}}$


m{n}}{
m{w}}0} $

m{n}}{
m{w}}}^{
m{b}} $

m{w}}0} $

m{w}}}^{
m{b}} $

m{w}}} $

m{n}}{
m{w}}} $

1.2
两相渗流方程的间断伽辽金弱形式
图1为模拟几何区域、边界条件和网格示意图. 在计算域



m{o}} $


m{i}} $


m{i}} $


m{o}} $
m{o}}{
m{D}}} $

m{o}}{
m{N}}} $

m{o}}=partial {varOmega }_{{
m{o}}{
m{D}}}cup partial {varOmega }_{{
m{o}}{
m{N}}} $

m{h}} $

ight} $

m{o}}cup partial {varOmega }_{
m{i}} $

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-1.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-1.jpg'" class="figure_img
figure_type1 bbb " id="Figure1" />
图
1
几何区域、边界条件和网格示意图
Figure
1.
Domain with boundary conditions and mesh skeleton
 下载:
下载: 全尺寸图片
幻灯片
$$Qleft({cal{T}}_{ m{h}} ight)=left{Vin {L}_{2}left(varOmega ight):V{|}_{E}in {p}_{{ m{r}}}left(E ight),forall Ein {cal{T}}_{ m{h}} ight} $$  | (14) |
式中, 离散空间
m{r}}}left(E
ight)$

为了推导两相渗流方程的间断伽辽金弱形式, 首先在式(1)等号的两侧乘以试函数
m{n}}{
m{w}}}} $

$$begin{split}& {int }_{E}left(phi {S}_{{ m{n}}{ m{w}}}{ ho }_{{ m{n}}{ m{w}}}{C}_{{ m{n}}{ m{w}}}dfrac{partial {p}_{{ m{n}}{ m{w}}}}{partial t}-phi { ho }_{{ m{n}}{ m{w}}}dfrac{partial {S}_{{ m{w}}}}{partial t} ight)widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V+ &qquad {int }_{E}nabla cdot left[{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight) ight]widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V= &qquad {int }_{E}{Q}_{{ m{n}}{ m{w}}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V end{split}$$  | (15) |
利用分部积分和散度定理, 式(15)中等号左侧第二项可表示为
$$begin{split}& {int }_{E}nabla cdot Big[{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)Big]widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V= &qquad {int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S- &qquad {int }_{E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot nabla widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V end{split}$$  | (16) |
将式(16)代入式(15), 累加所有单元区域, 可得
$$begin{split}& sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}left(phi {S}_{{ m{n}}{ m{w}}}{ ho }_{{ m{n}}{ m{w}}}{C}_{{ m{n}}{ m{w}}}frac{partial {p}_{{ m{n}}{ m{w}}}}{partial t}-phi { ho }_{{ m{n}}{ m{w}}}frac{partial {S}_{{ m{w}}}}{partial t} ight)widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V - &qquadsumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left({p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot nabla widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V+ &qquad sumlimits_{partial Ein partial {{Omega }}_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S= &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{Q}_{{ m{n}}{ m{w}}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V end{split}$$  | (17) |
在间断伽辽金方法中, 变量在单元内边界
m{i}} $

$$begin{split}& sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}nabla {p}_{{ m{n}}{ m{w}}}cdot {boldsymbol{n}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S= &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}^+left(nabla {p}_{{ m{n}}{ m{w}}}^++{ ho }_{{ m{n}}{ m{w}}}^+{boldsymbol{g}} ight)cdot {{boldsymbol{n}}}^+widetilde {{p}_{{ m{n}}{ m{w}}}^+}+& qquad {boldsymbol{lambda }}_{{ m{n}}{ m{w}}}^-left(nabla {p}_{{ m{n}}{ m{w}}}^-+{ ho }_{{ m{n}}{ m{w}}}^-{boldsymbol{g}} ight)cdot {{boldsymbol{n}}}^-widetilde {{p}_{{ m{n}}{ m{w}}}^-}{ m{d}}S= &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}[![{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{nw}{boldsymbol{g}} ight)widetilde {{p}_{{ m{n}}{ m{w}}}}]!]{ m{d}}S end{split}$$  | (18) |
将式(18)代入式(17)中, 结合稳定项、加罚函数项以及相应边界条件, 可得
$$begin{split}& sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}left(phi {S}_{{ m{n}}{ m{w}}}{ ho }_{{ m{n}}{ m{w}}}{C}_{{ m{n}}{ m{w}}}frac{partial {p}_{{ m{n}}{ m{w}}}}{partial t}-phi { ho }_{{ m{n}}{ m{w}}}frac{partial {S}_{{ m{w}}}}{partial t} ight)widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V- &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot nabla widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V + &qquadsumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}leftlangle {} ight.left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)left. {} ight angle [![widetilde {{p}_{{ m{n}}{ m{w}}}}]!]{ m{d}}S+ &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}leftlangle {} ight.nabla widetilde {{p}_{{ m{n}}{ m{w}}}}left. {} ight angle [![{p}_{{ m{n}}{ m{w}}}]!]{ m{d}}S+end{split} $$  |
$$begin{split} &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}[![{p}_{{ m{n}}{ m{w}}}]!]cdot [![widetilde {{p}_{{ m{n}}{ m{w}}}}]!]{ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{n}}{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S+ &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{n}}{ m{w}}}nabla widetilde {{p}_{{ m{n}}{ m{w}}}}cdot {boldsymbol{n}}left({p}_{{ m{n}}{ m{w}}}-{p}_{{ m{n}}{ m{w}}}^{ m{b}} ight){ m{d}}S + &qquadsumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}left({p}_{{ m{n}}{ m{w}}}-{p}_{{ m{n}}{ m{w}}}^{ m{b}} ight)widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S= &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{Q}_{{ m{n}}{ m{w}}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}V -sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{N}}}}{int }_{partial E}{g}_{{ m{n}}{ m{w}}}widetilde {{p}_{{ m{n}}{ m{w}}}}{ m{d}}S end{split}$$  | (19) |
式中,
ight.{boldsymbol{X}}left. {}
ight
angle =dfrac{1}{2}left({boldsymbol{X}}cdot {{boldsymbol{n}}}^{+}-{boldsymbol{X}}cdot {{boldsymbol{n}}}^{-}
ight) $




m{f}} $

m{f}} $

m{f}}=1 $


m{f}}=0 $

m{f}}=-1 $

m{f}}=1 $
利用上述类似的推导过程和方式, 可以得到式(2)的间断伽辽金弱形式, 如下所示
$$ begin{split}& sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}Biggr[phi {S}_{{ m{w}}}{ ho }_{{ m{w}}}{C}_{{ m{w}}}frac{partial {p}_{{ m{n}}{ m{w}}}}{partial t}+ &qquad left(phi { ho }_{{ m{w}}}-phi {S}_{{ m{w}}}{ ho }_{{ m{w}}}{C}_{{ m{w}}}left|{p}_{ m{c}} ight| ight)frac{partial {S}_{{ m{w}}}}{partial t}Biggr]widetilde {{S}_{{ m{w}}}}{ m{d}}V+ &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{boldsymbol{lambda }}_{{ m{w}}}left(left|{p}_{ m{c}} ight|nabla {S}_{{ m{w}}}-nabla {p}_{{ m{n}}{ m{w}}}-{ ho }_{{ m{w}}}{boldsymbol{g}} ight)cdot nabla widetilde {{S}_{{ m{w}}}}{ m{d}}V- &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}left|{p}_{ m{c}} ight|leftlangle {} ight.nabla {S}_{{ m{w}}}left. {} ight angle [![widetilde {{S}_{{ m{w}}}}]!]{ m{d}}S+ &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}left|{p}_{ m{c}} ight|leftlangle {} ight.nabla widetilde {{S}_{{ m{w}}}}left. {} ight angle [![{S}_{{ m{w}}}]!]{ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}[![{S}_{{ m{w}}}]!]cdot [![widetilde {{S}_{{ m{w}}}}]!]{ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}leftlangle {} ight.left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{w}}}{boldsymbol{g}} ight)left. {} ight angle [![widetilde {{S}_{{ m{w}}}}]!]{ m{d}}S+ &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}leftlangle {} ight.nabla widetilde {{S}_{{ m{w}}}}left. {} ight angle [![{p}_{{ m{n}}{ m{w}}}]!]{ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}[![{p}_{{ m{n}}{ m{w}}}]!]cdot [![widetilde {{S}_{{ m{w}}}}]!]{ m{d}}S- &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}left|{p}_{ m{c}} ight|nabla {S}_{{ m{w}}}cdot {boldsymbol{n}}widetilde {{S}_{{ m{w}}}}{ m{d}}S+end{split}$$  |
$$begin{split} &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}left|{p}_{ m{c}} ight|nabla widetilde {{S}_{{ m{w}}}}cdot {boldsymbol{n}}left({S}_{{ m{w}}}-{S}_{{ m{w}}}^{ m{b}} ight){ m{d}}S +&qquadsumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}left({S}_{{ m{w}}}-{S}_{{ m{w}}}^{ m{b}} ight)widetilde {{S}_{{ m{w}}}}{ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}left(nabla {p}_{{ m{n}}{ m{w}}}+{ ho }_{{ m{w}}}{boldsymbol{g}} ight)cdot {boldsymbol{n}}widetilde {{S}_{{ m{w}}}}{ m{d}}S+ &qquad {omega }_{ m{f}}sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}{boldsymbol{lambda }}_{{ m{w}}}nabla widetilde {{S}_{{ m{w}}}}cdot {boldsymbol{n}}left({p}_{{ m{n}}{ m{w}}}-{p}_{{ m{n}}{ m{w}}}^{ m{b}} ight){ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}frac{{delta }_{ m{f}}}{h}left({p}_{{ m{n}}{ m{w}}}-{p}_{{ m{n}}{ m{w}}}^{ m{b}} ight)widetilde {{S}_{w}}{ m{d}}S= &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{Q}_{{ m{w}}}widetilde {{S}_{{ m{w}}}}{ m{d}}V -sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{N}}}}{int }_{partial E}{g}_{{ m{w}}}widetilde {{S}_{{ m{w}}}}{ m{d}}Send{split}$$  | (20) |
式(19)和式(20)为考虑固体变形作用下可压缩两相渗流方程的间断伽辽金有限元方法的弱表达形式.
1.3
固体变形方程及其弱形式
假设多孔介质固体变形满足弹性小变形条件, 那么固体变形的平衡方程、几何方程、本构方程以及边界条件如下所示
$$nabla cdot {boldsymbol{sigma }}+{boldsymbol{f}}=0,;{ m{o}}{ m{n}};varOmega$$  | (21) |
$${boldsymbol{varepsilon }}=frac{1}{2}left(nabla {boldsymbol{u}}+nabla {{boldsymbol{u}}}^{ m{T}} ight),;{ m{o}}{ m{n}};varOmega $$  | (22) |
$${boldsymbol{sigma }}={boldsymbol{D}}:{boldsymbol{varepsilon }},;{ m{o}}{ m{n}};varOmega$$  | (23) |
$${boldsymbol{u}}={{boldsymbol{u}}}^{bf{b}},;;{ m{o}}{ m{n}};partial {varOmega }_{{ m{o}}{ m{D}}} $$  | (24) |
$${boldsymbol{sigma }}cdot {boldsymbol{n}}=overline{boldsymbol{t}},;;{ m{o}}{ m{n}};partial {varOmega }_{{ m{o}}{ m{N}}}$$  | (25) |
式中, 总应力

$$nabla cdot left({boldsymbol{sigma }}{'}-alpha {boldsymbol{I}}p ight)+{boldsymbol{f}}={bf{0}}$$  | (26) |
式中,







m{n}}{
m{w}}}{p}_{{
m{n}}{
m{w}}}+{S}_{{
m{w}}}{p}_{{
m{w}}} $

利用类似式(19)和式(20)的推导过程, 结合相应的边界条件, 可以得到固体变形方程的弱形式, 如下所示
$$ begin{split}& sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{{boldsymbol{sigma }}}^{{{'}}}:{boldsymbol{varepsilon }}left(widetilde {{boldsymbol{u}}} ight){ m{d}}V -sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}alpha {boldsymbol{I}}p:{boldsymbol{varepsilon }}left(widetilde {{boldsymbol{u}}} ight){ m{d}}V- &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}leftlangle {} ight.{{boldsymbol{sigma }}}^{{{'}}}-alpha {boldsymbol{I}}pleft. {} ight angle cdot {boldsymbol{n}}[![widetilde {{boldsymbol{u}}}]!]{ m{d}}S+ &qquad {omega }_{ m{s}}sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}leftlangle {} ight.{{boldsymbol{sigma }}}^{{{'}}}left(widetilde {{boldsymbol{u}}} ight)-alpha {boldsymbol{I}}pleft. {} ight angle cdot {boldsymbol{n}}[![{boldsymbol{u}}]!]{ m{d}}S+end{split}$$  |
$$begin{split} &qquad sumlimits_{partial Ein partial {varOmega }_{ m{i}}}{int }_{partial E}frac{G{delta }_{ m{s}}}{h}[![{boldsymbol{u}}]!]cdot [![widetilde {{boldsymbol{u}}}]!]{ m{d}}S- &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}left[{{boldsymbol{sigma }}}^{{{'}}}left(widetilde {{boldsymbol{u}}} ight)-alpha {boldsymbol{I}}p ight]cdot {boldsymbol{n}}widetilde {{boldsymbol{u}}}{ m{d}}S+ &qquad {omega }_{s}sumlimits_{partial Ein partial {varOmega }_{oD}}{int }_{partial E}left[{{boldsymbol{sigma }}}^{{{'}}}left(widetilde {{boldsymbol{u}}} ight)-alpha {boldsymbol{I}}p ight]cdot {boldsymbol{n}}left({boldsymbol{u}}-{{boldsymbol{u}}}^{ m{b}} ight){ m{d}}S+ &qquad sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{D}}}}{int }_{partial E}frac{G{delta }_{ m{s}}}{h}widetilde {{boldsymbol{u}}}cdot left({boldsymbol{u}}-{{boldsymbol{u}}}^{ m{b}} ight){ m{d}}S= &qquad sumlimits_{Ein {cal{T}}_{ m{h}}}{int }_{E}{boldsymbol{f}} cdot widetilde {{boldsymbol{u}}}{ m{d}}V-sumlimits_{partial Ein partial {varOmega }_{{ m{o}}{ m{N}}}}{int }_{partial E}overline{boldsymbol{t}}cdot widetilde {{boldsymbol{u}}}{ m{d}}S end{split}$$  | (27) |
式中,


m{s}} $

m{s}}=0 $

1.4
数值方法的实现
方程式(19), 式(20)和式(27)是多孔介质中可压缩两相渗流和固体变形的弱形式. 本文利用通用有限元软件COMSOL Multiphysics内置的Weak Form PDE模块求解可压缩两相流固耦合模型. 基于二次不连续拉格朗日形函数构建对解域的间断伽辽金有限元逼近, 选取向后差分公式(backward differentiation formula, BDF)隐式求解器. 其中, BDF求解器采用自适应时间步长算法和可变离散化阶数, 离散化的BDF精度从1 ~ 5不等. 基于LU分解, 采用MUMPS (multifrontal massively parallel sparse)直接求解器对线性系统进行求解, 并选取完全耦合的求解器(fully coupled solver)将线性求解器应用于牛顿单步法的非线性问题. 默认情况下, 初始时间步长设置为结束时间的0.1%, 相对容差为0.01.
2.
模型验证
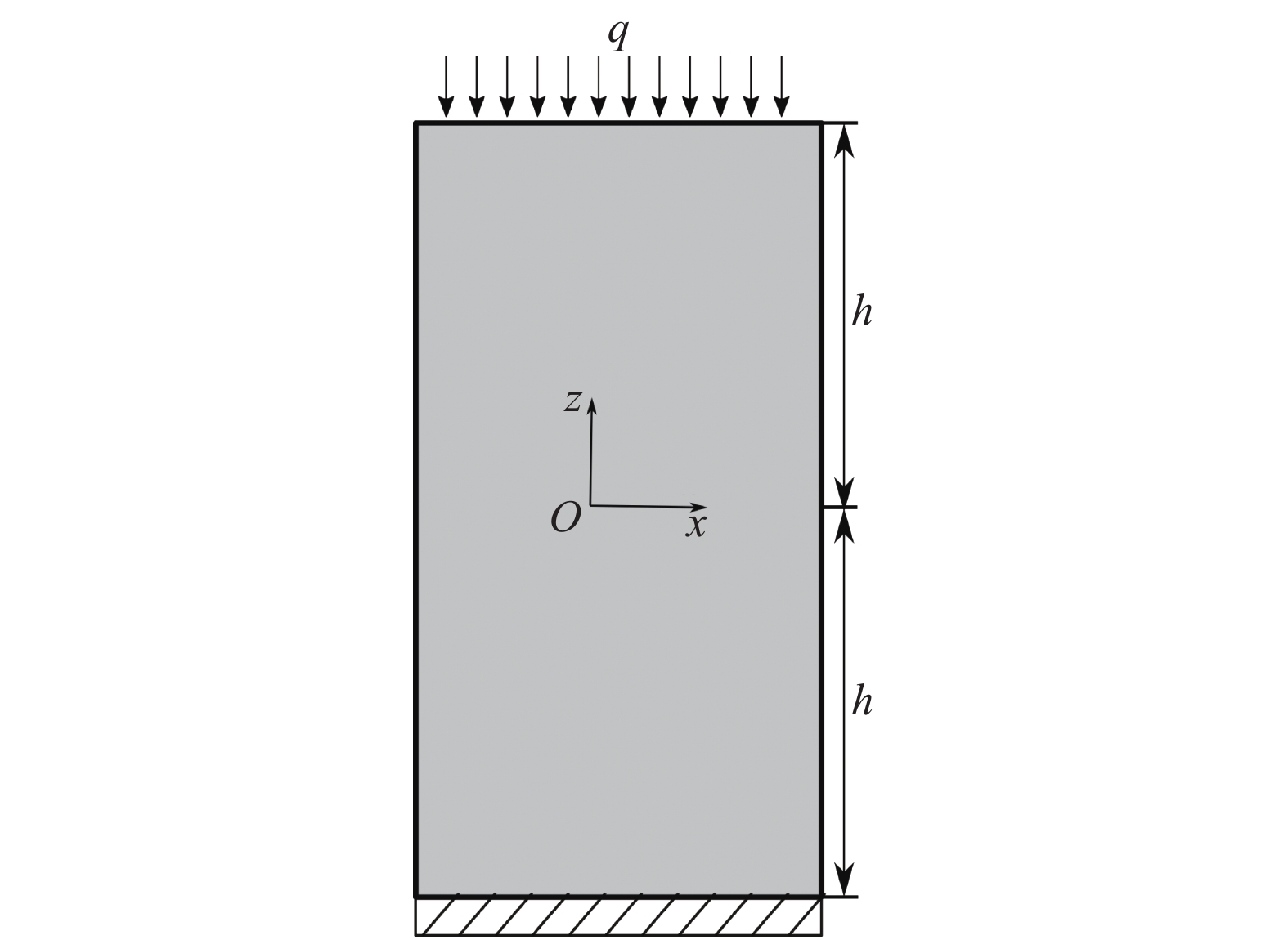
图2描述了一维Terzaghi固结问题的几何示意图以及相应的边界条件. 为了确保孔隙压力沿上下两端保持为零, 设置模型上下两端为排水边界. 在模型上边界瞬间施加均布载荷


m{m}}^{2} $

m{Pa}}}^{-1} $

m{Pa}}cdot {
m{s}} $

m{f}} $

m{s}} $

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-2.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-2.jpg'" class="figure_img
figure_type1 bbb " id="Figure2" />
图
2
Terzaghi固结问题几何示意图
Figure
2.
Sketch of Terzaghi’s consolidation problem
下载: 全尺寸图片
幻灯片
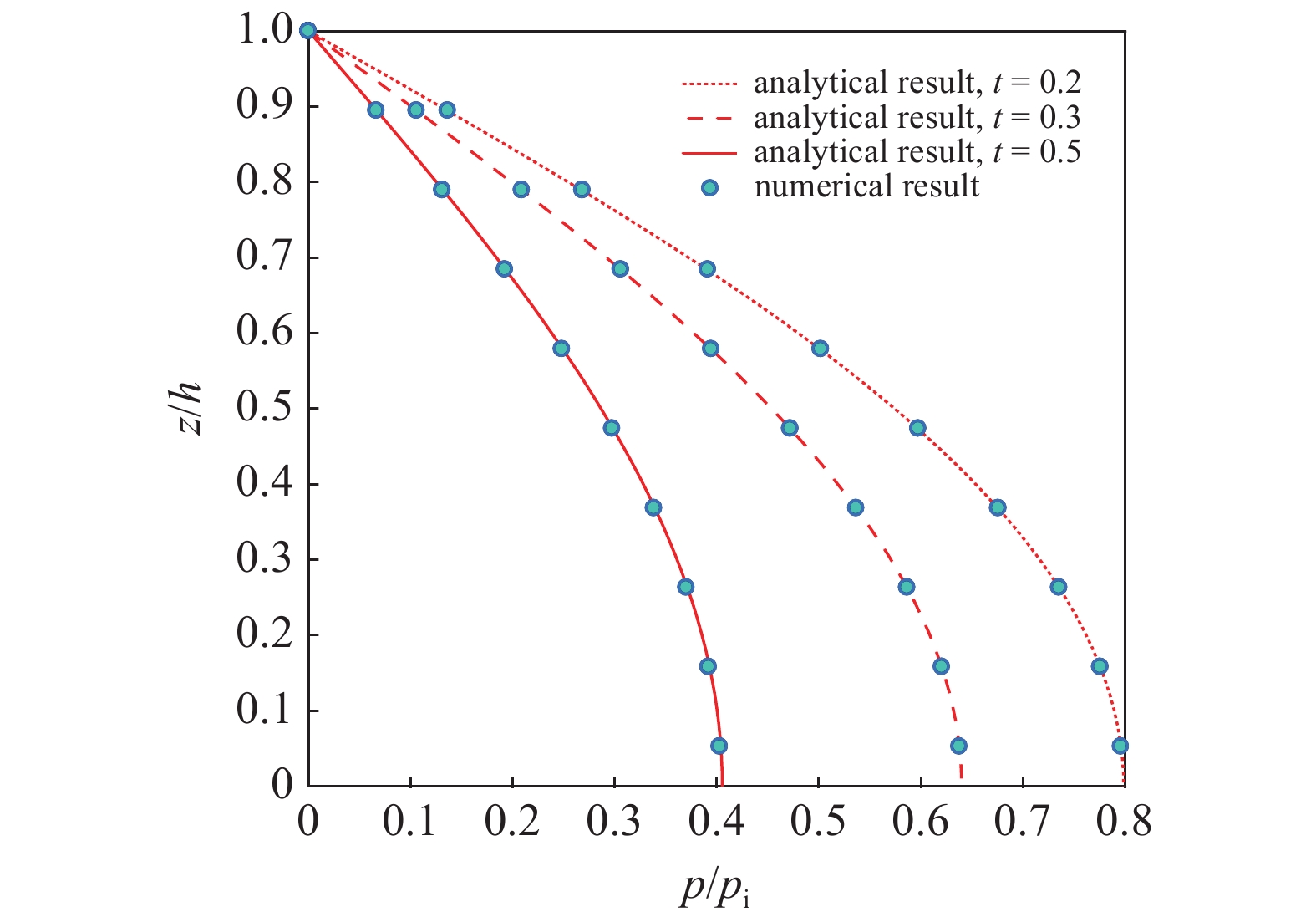
图3为Terzaghi固结问题的理论解[32]和DG有限元数值解的比较. 结果显示, DG有限元计算得到的数值解与理论解吻合较好, 进而验证了间断伽辽金方法在求解流固耦合方程时的可行性和有效性.
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-3.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-3.jpg'" class="figure_img
figure_type1 bbb " id="Figure3" />
图
3
Terzaghi固结问题理论解和数值解的比较
Figure
3.
Comparison of the analytical and numerical results for Terzaghi’s consolidation problem
下载: 全尺寸图片
幻灯片
3.
算例分析
3.1
二维平面两相流固算例
本节利用间断伽辽金方法开展在二维平面应变条件下两相渗流和固体变形耦合数值计算. 在本算例中, 分别选取水和氢气作为湿润相和非湿润相. 模型的几何尺度、初始条件、边界条件和监测线如图4所示. 模型的长度和宽度均设置为10.00 m. 多孔介质的弹性模量和泊松比分别为10.00 GPa和0.30; 渗透率和孔隙度分别设定为
m{m}}^{2} $



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-4.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-4.jpg'" class="figure_img
figure_type1 bbb " id="Figure4" />
图
4
模拟几何尺度、初始和边界条件
Figure
4.
Simulation geometrical configuration with boundary and initial conditions
下载: 全尺寸图片
幻灯片
数值模拟分两个阶段开展. 首先, 开展储层力学和流体平衡的稳态计算. 然后, 将第一步计算得到的应力和孔压等水力信息作为含水层氢气注入模拟算例的初始条件. 整个模拟时间为1500 s, 其他变量的具体数值如表1所示.
表
1
两相流固数值模拟的属性参数
Table
1.
Parameters for two-phase flow simulation
table_type1 ">
| Parameter | Value | Unit |
| elastic modulus, $ E $ | $ 30.00 $ | $ { m{G}}{ m{Pa}} $ |
| poisson's ratio, $ nu $ | $ 0.25 $ | $ - $ |
| permeability, $ k $ | $ 1.00times {10}^{-14} $ | $ ;{ m{m}}^{2} $ |
| porosity, $ phi $ | $ 0.20 $ | $ - $ |
| water density, $ ;{ ho }_{{ m{w}}0} $ | $ 1000.00 $ | $ { m{kg}}/{ m{m}}^{3} $ |
| water viscosity, $ ;{mu }_{{ m{w}}} $ | $ 1.00times {10}^{-3} $ | $ { m{Pa}}cdot { m{s}} $ |
| water compressibility[32], $ {c}_{{ m{w}}} $ | $ 3.84times {10}^{-10} $ | $ {{ m{Pa}}}^{-1} $ |
| hydrogen density, $; { ho }_{{ m{n}}{ m{w}}0} $ | $ 3.18 $ | $ { m{kg}}/{ m{m}}^{3} $ |
| hydrogen viscosity, $; {mu }_{{ m{n}}{ m{w}}} $ | $ 9.02times {10}^{-6} $ | $ { m{Pa}}cdot { m{s}} $ |
| hydrogen compressibility[32], $ {c}_{{ m{n}}{ m{w}}} $ | $ 7.71times {10}^{-7} $ | $ {{ m{Pa}}}^{-1} $ |
| entry pressure, $ {p}_{ m{e}} $ | $ 1.00times {10}^{4} $ | $ { m{Pa}} $ |
| distribution index, $ lambda $ | $ 0.46 $ | $ - $ |
| relative permeability variable, $ omega $ | $ 2.00 $ | $ - $ |
| variable, $ {omega }_{ m{f}} $ | 1.00 | $ - $ |
| penalty factor[27], $ {delta }_{ m{f}} $ | 1.00 | $ - $ |
| variable, $ {omega }_{ m{s}} $ | 0.00 | $ - $ |
| penalty factor[27], $ {delta }_{ m{s}} $ | 10.00 | $ - $ |
下载: 导出CSV
|显示表格
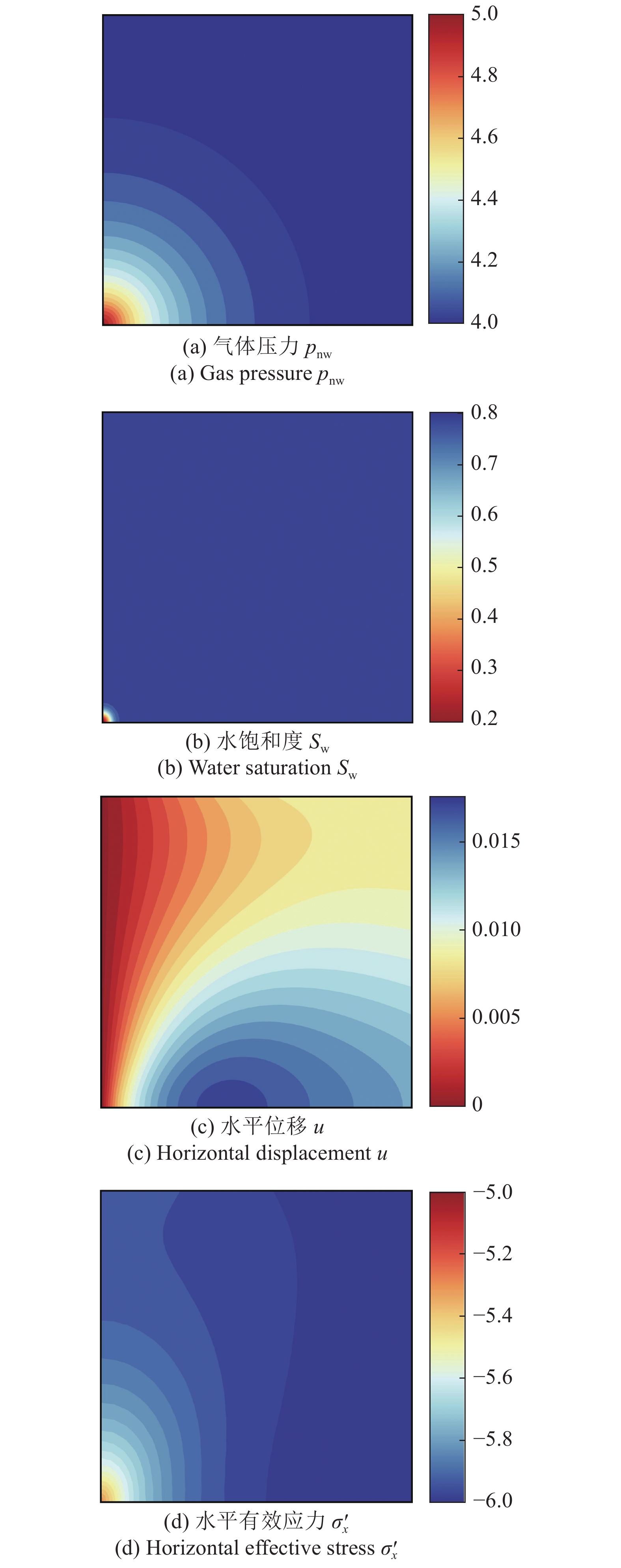
图5和图6分别给出了注气第1500 s气体压力
m{n}}{
m{w}}} $

m{w}}} $



 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-5.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-5.jpg'" class="figure_img
figure_type1 bbb " id="Figure5" />
图
5
第1500 s气体压力
m{n}}{
m{w}}} $

m{w}}} $



Figure
5.
The distribution of gas pressure
m{n}}{
m{w}}} $

m{w}}} $


 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-6.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-6.jpg'" class="figure_img
figure_type1 bbb " id="Figure6" />
图
6
第1500 s时气体压力
m{n}}{
m{w}}} $

m{w}}} $



Figure
6.
The profiles of gas pressure
m{n}}{
m{w}}} $

m{w}}} $


 下载:
下载: 全尺寸图片
幻灯片
3.2
加罚因子的影响
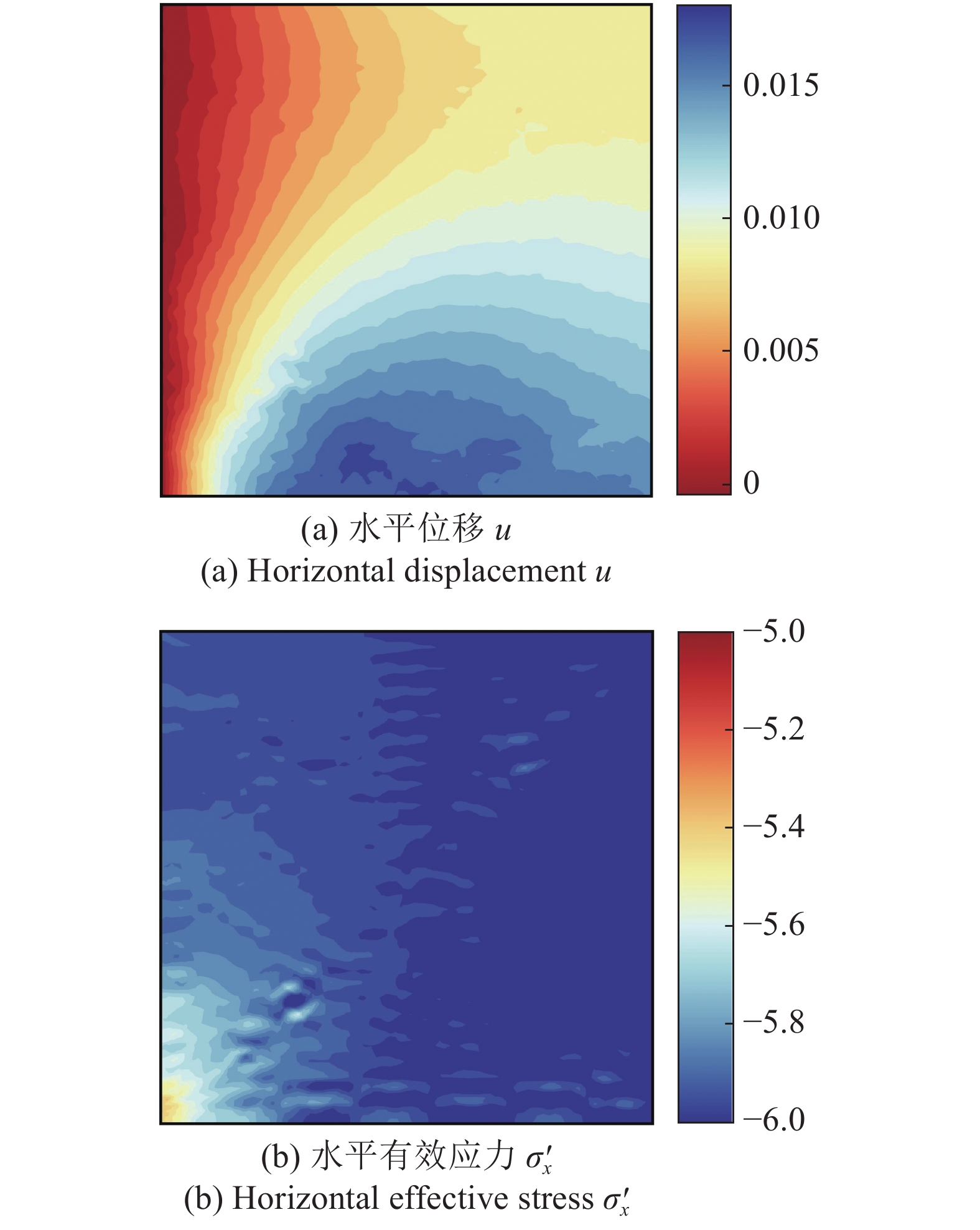
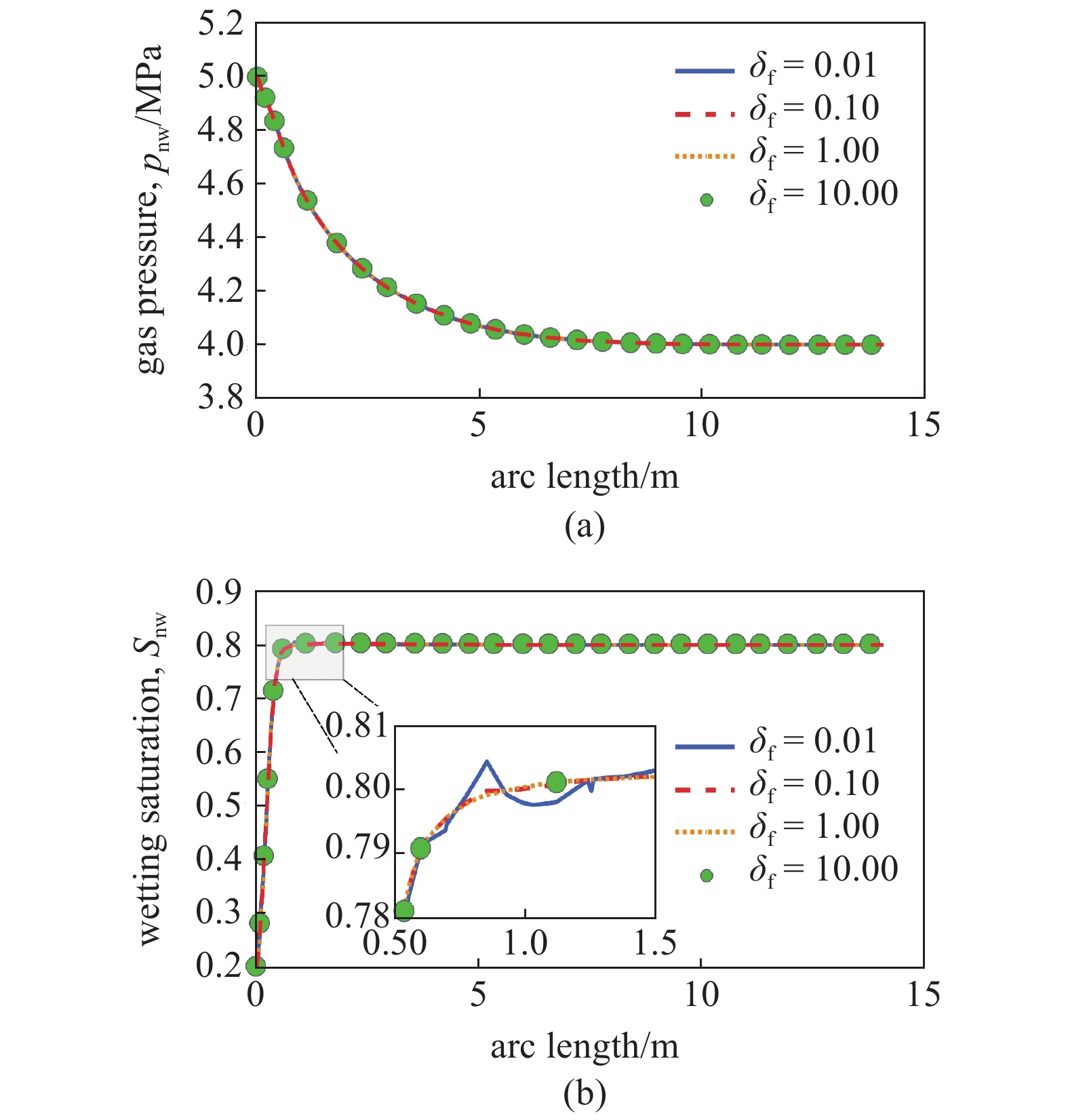
图7给出了
m{s}}=0.10 $








m{s}}=0.10 $
m{f}}=0.01 $

m{n}}{
m{w}}} $


m{w}}} $


m{n}}{
m{w}}} $
m{w}}} $
m{s}} $


m{f}} $


m{s}} $
m{f}} $
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-7.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-7.jpg'" class="figure_img
figure_type1 bbb " id="Figure7" />
图
7
第1500 s时不同加罚因子
m{s}} $



Figure
7.
The profiles of horizontal displacement


m{s}} $
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-8.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-8.jpg'" class="figure_img
figure_type1 bbb " id="Figure8" />
图
8
第1500 s时
m{s}}=0.01 $



Figure
8.
The distribution of horizontal displacement


m{s}}=0.01 $
 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-9.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-9.jpg'" class="figure_img
figure_type1 bbb " id="Figure9" />
图
9
第1500 s时不同加罚因子
m{f}} $

m{n}}{
m{w}}} $

m{w}}} $

Figure
9.
The profiles of gas pressure
m{n}}{
m{w}}} $

m{w}}} $

m{f}} $
 下载:
下载: 全尺寸图片
幻灯片
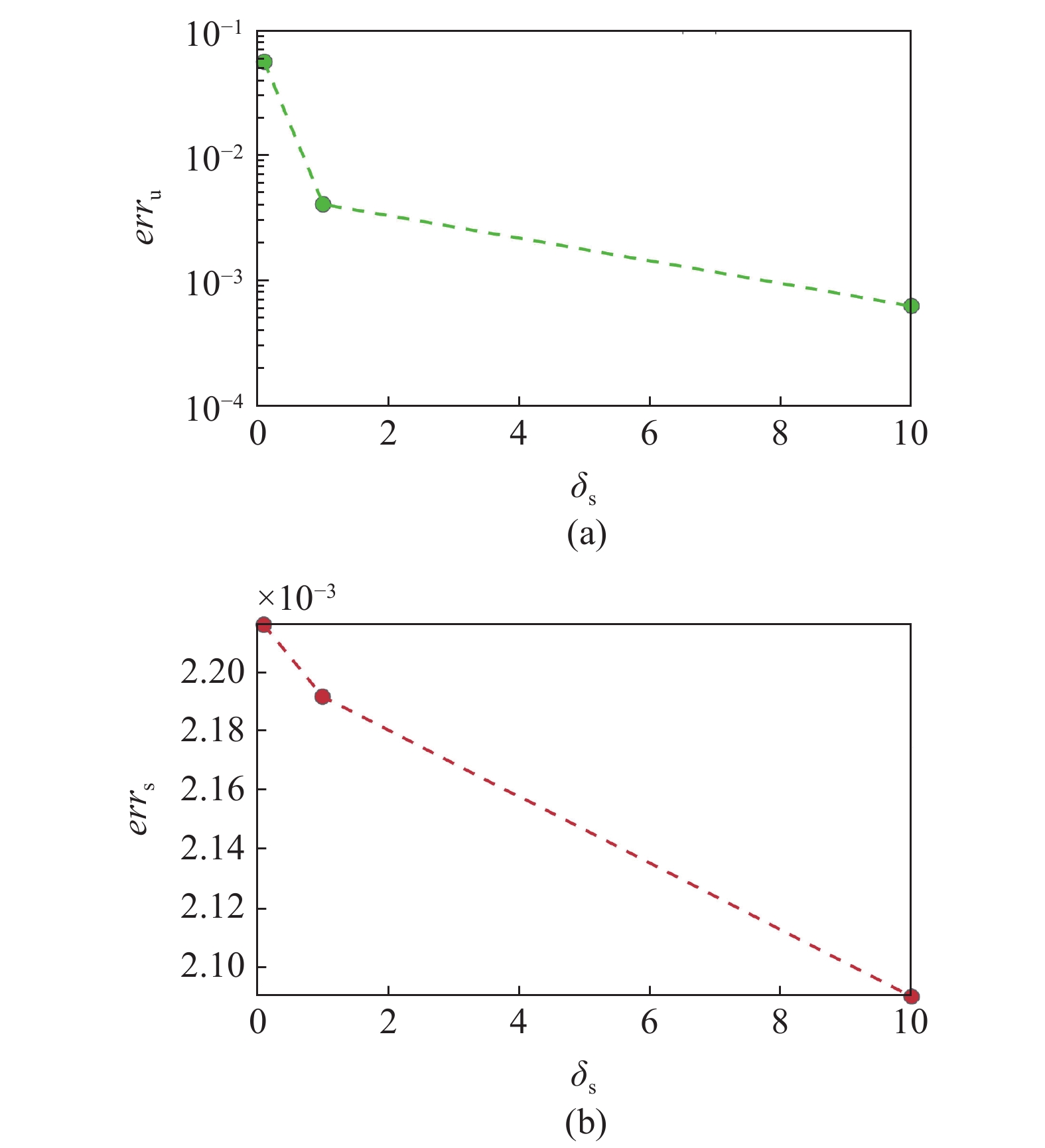
值得注意的是, 受流体边界条件、初始条件以及流体方程的非线性特征等因素的影响, 传统有限元方法在求解本节流体模型时无法收敛, 此情况在一定程度上体现了间断伽辽金有限元在求解可压缩两相流固方程上的优越性. 本节将传统有限元的计算结果作为基准方案, 通过比较间断伽辽金有限元和传统有限元两者计算得到的水平位移和水平有效应力之间的相对误差, 分析加罚因子
m{s}}} $

m{u}} $

m{s}} $

$$er{r}_{ m{u}}=sqrt{frac{1}{left|l ight|{left({Delta }{u}_{{ m{C}}{ m{G}}} ight)}^{2}}sumlimits_{E}left|h ight|{left({u}_{{ m{D}}{ m{G}}}-{u}_{{ m{C}}{ m{G}}} ight)}^{2}}$$  | (28) |
$$er{r}_{ m{s}}=sqrt{frac{1}{left|l ight|{left({Delta }{sigma }_{x{ m{C}}{ m{G}}}^{{{'}}} ight)}^{2}}sumlimits_{E}left|h ight|{left({sigma }_{x{ m{D}}{ m{G}}}^{{{'}}}-{sigma }_{x{ m{C}}{ m{G}}}^{{{'}}} ight)}^{2}}$$  | (29) |
式中,

m{C}}{
m{G}}} $


m{C}}{
m{G}}}^{{{'}}} $


m{C}}{
m{G}}} $

m{C}}{
m{G}}}^{{{'}}} $

m{C}}{
m{G}}} $
m{C}}{
m{G}}}^{{{'}}} $
m{D}}{
m{G}}} $

m{D}}{
m{G}}}^{{{'}}} $

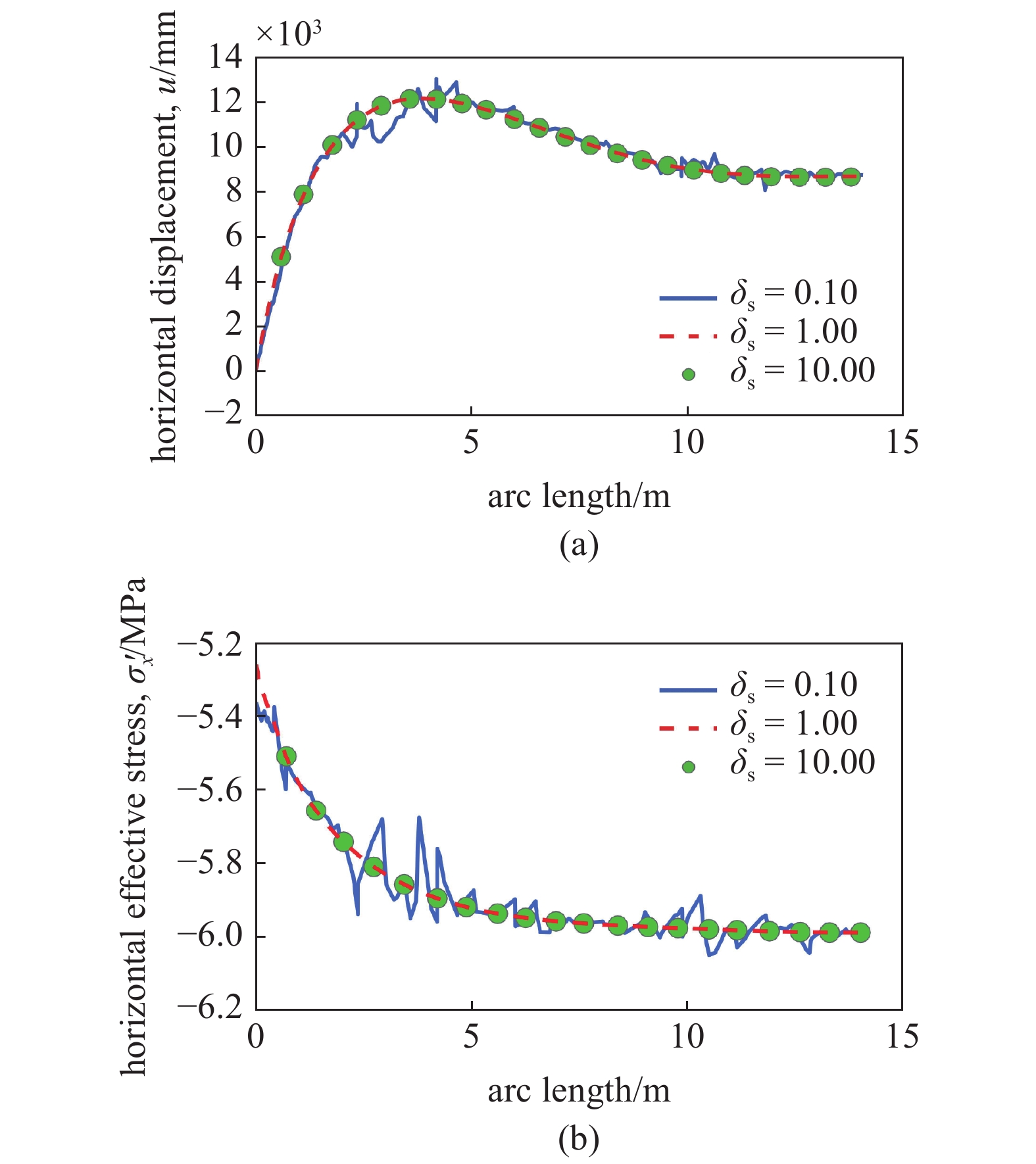
图10给出了不同加罚因子
m{s}} $


m{s}} $
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-10.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-10.jpg'" class="figure_img
figure_type1 bbb " id="Figure10" />
图
10
不同加罚因子
m{s}} $

Figure
10.
Comparison of the horizonal displacement and horizonal effective stress between DG and the CG results with different values of penalty parameter
m{s}} $
 下载:
下载: 全尺寸图片
幻灯片
3.3
考虑重力效应的两相流固三维算例
在本节中, 将开展含水层注氢气的三维数值模拟. 在此算例中, 侧重分析流体重力效应对模拟结果的的影响. 如图11所示, 三维算例的几何尺度为100.00 m×2.00 m×10.00 m. 模拟上边界和右边界为应力边界且
m{M}}{
m{Pa}}$

m{nw}}}= $

m{kg}}/({
m{m}}^{2}cdot {
m{s}})$

 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-11.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-11.jpg'" class="figure_img
figure_type1 bbb " id="Figure11" />
图
11
三维模型几何尺度以及模拟初始和边界条件
Figure
11.
Geometrical configuration with boundary and initial conditions of 3D case
下载: 全尺寸图片
幻灯片
图12给出了注气1 d后气体压力
m{n}}{
m{w}}} $

m{n}}{
m{w}}} $




m{n}}{
m{w}}} $
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-12.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-12.jpg'" class="figure_img
figure_type1 bbb " id="Figure12" />
图
12
注气1 d后气体压力
m{n}}{
m{w}}} $

m{n}}{
m{w}}} $



Figure
12.
The distribution of gas pressure
m{n}}{
m{w}}} $

m{n}}{
m{w}}} $


 下载:
下载: 全尺寸图片
幻灯片
 onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-13.jpg'"
onerror="this.onerror=null;this.src='https://lxxb.cstam.org.cn/fileLXXB/journal/article/lxxb/2021/8//lxxb2021-177-13.jpg'" class="figure_img
figure_type1 bbb " id="Figure13" />
图
13
考虑和不考虑重力效应算例中点a, b和c处气饱和度
m{n}}{
m{w}}} $

Figure
13.
The temporal evolution of gas saturation
m{n}}{
m{w}}} $
 下载:
下载: 全尺寸图片
幻灯片
4.
结论
本文建立了考虑毛细压力和重力效应的可压缩两相渗流与孔隙介质变形耦合作用的力学模型. 在此基础上, 分别推导出变形孔隙介质中两相渗流方程的非对称内罚伽辽金弱形式以及固体变形方程的非完全内罚伽辽金弱形式. 主要结论如下:
(1)通过对比一维Terzaghi固结问题的解析解和数值解, 验证了间断伽辽金有限元方法在求解流固耦合问题方面的可行性和准确性;
(2)开展了二维平面应变条件下和考虑重力效应作用的三维两相流固数值算例. 结果显示, 随着气体的注入, 气体饱和度和孔压随之增加, 导致多孔介质膨胀变形和有效应力降低. 由于重力的影响, 气体会上浮聚集于顶部边界;
(3)在二维平面算例中, 讨论了加罚因子对计算结果的影响. 结果表明, 在相同网格条件下, 加罚因子
m{f}} $

m{s}} $



m{s}} $
m{s}} $
