关键词:双足机器人;欠驱动;步态切换;不平整地面;控制方法 Abstract The stability control of underactuated 3-D biped robot is still a hard nut to crack, as a result of locomotion characteristics which mix high dimension, strong nonlinearity and underactuation. Some traditional control methods, such as event-based feedback control and PD control, are poor in robustness and weak in resistance to external disturbances. Through observation, it is certain that humans adjust gaits tactically to regain stability when they are affected by external disturbances, by contrast with trying to keep the stability sustained by only one gait which is quite limited. Inspired by this, a control method based on gait transition is proposed for the underactuated 3-D biped robot. First of all, taking the minimum energy consumption as the optimization goal, a multi group of gait and step gait is designed as the reference gait to build a gait library by nonlinear optimization method. Secondly, to obtain an optimal performance in terms of the balance between the stability and input torques, a multi-objective gait transition function is established. Finally, a reference gait that minimizes the gait transition function is obtained by solving a quadratic optimization problem, and it is then used as the walking gait for the next step with the purpose of using gait library (multiple trajectories) method to reach the goal of improving robustness. In the simulation experiment, using the proposed gait transition control method, the underactuated 3-D biped robot can walk through the rough ground with the relative height varying within the range [20,20] mm without falling down, in contrast to the failure of previous one-gait control method. The results show the effectiveness of the method.
为说明该步态切换策略能够有效提高行走鲁棒性, 参考文献[34]中的地面高度设置, 以摆动腿落地时, 地面接触高 在[ 20,20] mm (约为4%的腿长)内随机变化的不平整路面作为扰动 (摆动腿落地后, 直到发生下一次碰撞前, 地面高度不再变化). 实验中共测试100 步, 并进一步假设 以每20步为一个周期, 即 , 如图5 所示. 显示原图|下载原图ZIP|生成PPT 图5随机生成路面高度 (以20步为一个循环). -->Fig.5Profile of randomly generated ground heights (every 20 steps as a period) -->
图6所示为机器人关节角度和角度速的相图, 仅采用基于事件的控制方法时, 机器人在三步之后相图呈发散状, 即机器人摔倒. 然而, 采用本文基于步态切换的控制方法, 通过切换不同的步态, 机器人能够有效克服地面高度的随机变化, 通过不平整地面, 如图7所示. 显示原图|下载原图ZIP|生成PPT 图6基于事件控制下的关节角度和角速度, 其中黑点为起始位置. -->Fig.6Joint angles and angular velocities under the event-based control, where the red solid circle is the initial position -->
显示原图|下载原图ZIP|生成PPT 图7步态切换控制下20步内的关节角度和角速度, 其中黑点为起始位置. -->Fig.7Joint angles and angular velocities within 20 steps under the gait transition control, where the red solid circle is the initial position -->
(ChengJing, ChenLi.Mechanical analysis and calm control of dual-arm space robot for capturing a satellite .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 832-842 (in Chinese))
(TaoBo, GongZeyu, DingHan.Survey on uncalibrated robot visual servoing control .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 767-783 (in Chinese))
(WangDong, WuJun, WangLiping, et al.research on the inertia coupling property of a 3-PRS parallel robot .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(4): 804-812 (in Chinese))
(HuLingyun, SunZengxi.Survey on gait control strategies for biped robot .Journal of Computer Research and Development, 2005, 42(5): 728-733 (in Chinese))
[5]
Alcaraz-JimenezJJ, Herrero-PerezD, Martinez-BarberaH.Robust feedback control of ZMP-based gait for the humanoid robot Nao .The International Journal of Robotics Research, 2013, 32(9-10): 1074-1088
[6]
HurmuzluY, GénotF, BrogliatoB.Modeling, stability and control of biped robots-a general framework .Automatica, 2004, 40(10): 1647-1664
(TianYantao, SunZhongbo, LiHongyang, et al.A review of optimal and control strategies for dynamic walking bipedal robots .Acta Automatica Sinica, 2016, 42(8): 1142-1157 (in Chinese))
[8]
YazdaniM, SalariehH, Saadat FoumaniM.Decentralized control of rhythmic activities in fully-actuated/under-actuated robots .Robotics and Autonomous Systems, 2018, 101: 20-33
[9]
SpongMW, BulloF.Controlled symmetries and passive walking .IEEE Transactions on Automatic Control, 2005, 50(7): 1025-1031
[10]
AmesAD, SinnetRW, WendelEDB.Three-dimensional kneed bipedal walking: A hybrid geometric Approach//Hybrid Systems: Computation and Control, International Conference, HSCC 2009, San Francisco, CA, USA, April 13-15, 2009: 16-30
[11]
GreggRD, SpongMW.Reduction-based control of three-dimensional bipedal walking robots .International Journal of Robotics Research, 2010, 29(6): 680-702
[12]
ManchesterIR, MettinU, IidaF, et al.Stable dynamic walking over uneven terrain .International Journal of Robotics Research, 2011, 30(3): 265-279
[13]
WesterveltER, GrizzleJW, KoditschekDE.Hybrid zero dynamics of planar biped walkers .IEEE Transactions on Automatic Control, 2003, 48(1): 42-56
[14]
MorrisB, GrizzleJW.Hybrid invariant manifolds in systems with impulse effects with application to periodic locomotion in bipedal robots .IEEE Transactions on Automatic Control, 2009, 54(8): 1751-1764
[15]
ChevallereauC, AbbaG, AoustinY, et al.Rabbit: a testbed for advanced control theory .IEEE Control Systems Magazine, 2003, 23(5): 57-79
[16]
SreenathK, ParkHW, PoulakakisI, et al.Embedding active force control within the compliant hybrid zero dynamics to achieve stable, fast running on MABEL .International Journal of Robotics Research, 2013, 32(3): 324-345.
[17]
MartinE, PostDC, SchmiedelerJP.The effects of foot geometric properties on the gait of planar bipeds walking under HZD-based control .International Journal of Robotics Research, 2014, 33(12): 1530-1543
[18]
GreggRD, LenziT, HargroveLJ, et al.Virtual constraint control of a powered prosthetic leg: From simulation to experiments with transfemoral amputees .IEEE Transactions on Robotics, 2014, 30(6): 1455-1471
[19]
ZhaoH, HornJ, ReherJ, et al.Multicontact locomotion on transfemoral prostheses via hybrid system models and optimization-based control .IEEE Transactions on Automation Science & Engineering, 2016, 13(2): 502-513
[20]
ZhaoH, AmbroseE, AmesAD.Preliminary results on energy efficient 3D prosthetic walking with a powered compliant transfemoral prosthesis// IEEE International Conference on Robotics and Automation, 2017, Singapore, 2017,IEEE, 2017:1140-1147
[21]
AgrawalA, HaribO, HereidA, et al.First steps towards translating HZD control of bipedal robots to decentralized control of exoskeletons .IEEE Access, 2017, 5(1): 9919-9934
[22]
ChevallereauC, GrizzleJW, ShihCL.Asymptotically stable walking of a five-link underactuated 3-D bipedal robot .IEEE Transactions on Robotics, 2009, 25(1): 37-50 [本文引用: 1]
[23]
RamezaniA, HurstJW, HamedKA, et al.Performance analysis and feedback control of ATRIAS, a three-dimensional bipedal robot .Journal of Dynamic Systems Measurement & Control, 2013, 136(2): 729-736
[24]
GriffinB, GrizzleJ.Walking gait optimization for accommodation of unknown terrain height variations// American Control Conference (ACC), Chicago IL USA,IEEE, 2015: 4810-4817
[25]
DaiH, TedrakeR.L2-gain optimization for robust bipedal walking on unknown terrain// Robotics and Automation (ICRA), 2013 IEEE International Conference on,Karlsruhe Germany, IEEE, 2013: 3116-3123
[26]
李超. 欠驱动双足机器人动态步行规划与抗扰动控制. [博士论文] . 杭州:浙江大学, 2015
(LiChao.Dynamic locomotion and anti-disturbance control of underactuated biped robots. [PhD Thesis] . Hangzhou: Zhejiang University, 2015 (in Chinese))
[27]
LiC, XiongR, ZhuQG, et al.Push recovery for the standing under-actuated bipedal robot using the hip strategy .Frontiers of Information Technology & Electronic Engineering, 2015, 16(7): 579-593 [本文引用: 1]
[28]
ChenZ, Lakbakbi ElyaaqoubiN, AbbaG.Optimized 3D stable walking of a bipedal robot with line-shaped massless feet and sagittal underactuation .Robotics and Autonomous Systems, 2016, 83: 203-213 [本文引用: 2]
[29]
MaggioreM, ConsoliniL.Virtual molonomic constraints for Euler-Lagrange systems .IEEE Transactions on Automatic Control, 2013, 58(4): 1001-1008
[30]
WesterveltER, GrizzleJW, KoditschekDE.Hybrid zero dynamics of planar biped walkers .IEEE Transactions on Automatic Control, 2003, 48(1): 42-56
[31]
AsanoF.Fully analytical solution to discrete behavior of hybrid zero dynamics in limit cycle walking with constraint on impact posture .Multibody System Dynamics, 2015, 35(2): 191-213
[32]
WesterveltER, MorrisB, FarrellKD.Analysis results and tools for the control of planar bipedal gaits using hybrid zero dynamics .Autonomous Robots, 2007, 23(2): 131-145
[33]
GrizzleJW, WesterveltER, Canudas-De-Wit C. Event-based PI control of an underactuated biped walker//Decision and Control, 2003, Proceedings. 42nd IEEE Conference on, Maui HI USA, IEEE, 2003: 3091-3096
[34]
HamedKA, BussBG, GrizzleJW.Exponentially stabilizing continuous-time controllers for periodic orbits of hybrid systems: Application to bipedal locomotion with ground height variations .International Journal of Robotics Research, 2016, 35(8): 977-999 [本文引用: 1]

 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT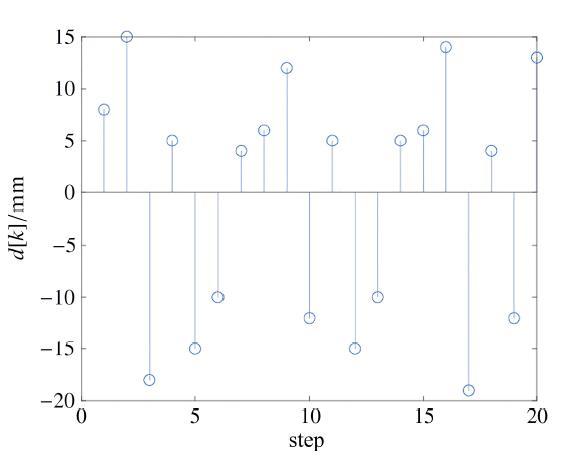 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT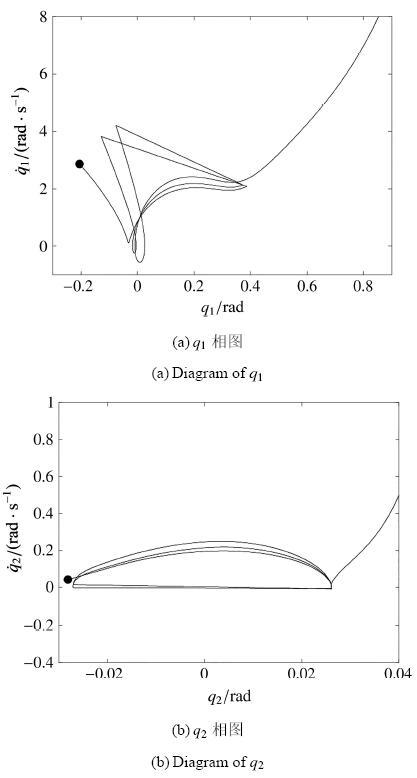 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}