模块化设计方法(Modular Design Method,MDM)是实现产品快速设计的有效手段,通过对产品进行功能分解,从而划分出一系列的通用化模块,建立产品的模块化体系。当客户的需求发生变化时,通过具有特定功能的模块的选择和组合重构系统功能,从而实现产品的快速响应设计[4]。采用模块化设计方法可以实现高效产品升级、降低复杂性、降低费用、实现快速产品设计[5]。
在机械系统的模块化设计方法中,Stone等[6]以客户需求程度作为衡量标准,通过定量框架的方法量化功能与客户需求之间的关系,提出一种启发式的模块分类方法。Kreng和Lee[7]以模块内组件的功能和物理联系最大、模块内组件的模块驱动力(MDF)的相似性最大为目标进行模块划分。Wei等[8]以模块之间的内部关联最大、模块之间的互相关联最小、系统的整体稳定性最大为目标采用多目标优化求解方法进行模块划分。Jose和Tollenaere[9]将模块化设计方法分为5类:聚类方法[10],图论和矩阵分割方法[11],数学规划方法[12],人工智能方法[13-14],遗传算法和启发式方法[15]。
陆良等[16]采用模块化方法将汽车的硬件控制电路和软件算法划分为标准模块,通过模块的合理组合完成汽车控制电器的软硬件设计。Pritschow等[17]提出控制系统的模块化设计方法应满足标准化、可扩展性、互换性和实效性要求,并基于控制模型库实现控制系统重构。何岭松等[18]基于模型组件对象(Compent Object Model, COM)技术提出软件总线结构的装配式可重构虚拟仪器系统,实现测试系统的在线升级和功能调整。
当前的研究缺乏针对机械结构、控制器和控制软件的模块化总体设计方法的研究。本文针对缠绕机的结构组成特点,提出适应不同缠绕工艺(干法、湿法和半干法)的模块化重构方法,拓展缠绕机的功能多样性。
1 总体设计 缠绕机的模块化设计方法包括模块划分和模块配置方法。模块划分将缠绕机的组件根据功能和结构聚类为标准模块,并根据功能和工艺的不同设计模块实例,模块实例之间具有标准化和通用化的接口;根据产品的需求变化,将不同功能的实例进行增减和替换,以实现产品功能的快速重构。
缠绕机机电系统的模块化设计模型如图 1所示,分别建立模块化的机械结构、控制器和控制软件。机械结构的模块化配置方法是控制器和软件配置的基础;控制器根据机械结构的模块配置结果选择对应的传感模块和控制模块,并通过网络接口连接到现场总线;控制软件根据控制模块的连接状态对控制模式进行分类,解析每个控制模块之间的状态转移关系,并调用对应的软件模块完成软件的功能重构。
 |
| 图 1 缠绕机机电系统模块化设计模型 Fig. 1 Modular design model for mechatronic system of winding machine |
| 图选项 |
机械系统的模块划分和模块配置是进行系统模块化设计方法的基础,控制器通过机电接口与机械结构连接,其模块划分和配置粒度与机械结构保持一致,控制软件通过现场总线与控制器进行连接和数据交换。因此,缠绕机的模块化设计问题分为:
1) 机械结构的模块划分和模块配置问题。
2) 控制器的接口标准化方法和控制系统的
组合重构问题。
3) 控制软件的控制模式划分和软件模块重构问题。
本文针对上述3个问题进行研究,分别提出相应的模块化设计方法。
2 模块划分 2.1 机械结构模块划分
2.1.1 模块划分数学模型 模块划分将缠绕机的独立组件根据相互关联强度和功能相似度聚类为功能模块。首先分析组件之间的关联强度,然后依据划分准则建立模块划分的数学模型,求解模型得到组件的聚类结果。从功能关联和全生命周期的稳定性角度,模块划分的准则为:①同一个模块内部组件之间的功能关联、几何关联最大;②产品全生命周期的稳定性最大,即影响产品全生命周期的模块驱动力的组件应该划分在同一个模块中。
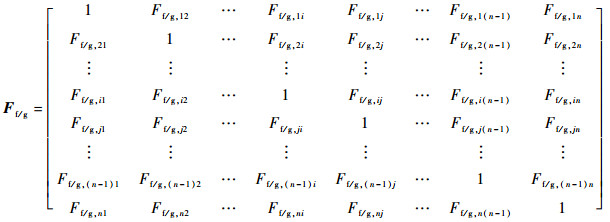
根据准则①,组件之间的功能和几何位置关联强度矩阵为
 | (1) |
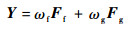
式中:n为系统中的组件的数量;Ff, ij为组件i与组件j之间的功能关联强度;Fg, ij为组件i与组件j之间的几何位置关联强度,其值9、3、1和0分别表示强关联、一般关联、弱关联和无关联,相同组件关于其自身的关联强度为1。根据Ff和Fg可以得到描述组件之间总体功能关系的综合关联矩阵Y
 | (2) |
式中:ωf为功能关联的权重值;ωg为几何位置关联的权重值,其关系满足ωf+ωg=1。
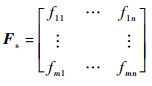
除了组件之间的功能和几何位置关联,缠绕机在全生命周期的稳定性是影响生产效率、产品质量的关键因素,因此应分析影响稳定性的关键设计因素,即模块驱动力。在模块划分过程中,对于模块驱动力有相似贡献度的组件应该划分在一个模块中,一个模块内的模块驱动力的更高相似性会使模块化的系统更加稳定。组件与模块驱动力的关联矩阵为
 | (3) |
式中:fij为第i个模块驱动力与第j个组件之间的关联程度,其值9、3、1和0分别表示强关联、中等关联、弱关联和无关联。
由K个模块组成的系统可以用矩阵G=[gjk]表示,其中:
 |
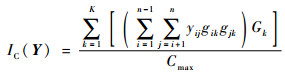
根据组件的综合关联矩阵,所有模块的组件之间的总聚合度为
 | (4) |
式中:yij为组件i与组件j之间的关于功能和几何位置的综合关联强度;Gk为第k个模块的相似度系数;Cmax为模块之间的最大关联度之和。
 | (5) |
式中:ymax为组件之间关于功能和几何位置的综合关联强度最大值,即ymax=9。
根据组件与模块驱动力的关联矩阵,模块内部组件之间的相似度可以表示为
 | (6) |
式中:ωi为第i个模块驱动力的权重,通过层次分析法进行定性和定量分析得到;Eik为第i个模块驱动力在第k个模块中的熵;Sik为在第k个模块中第i个模块驱动力的不相似性的平方和;Sikmax为第k个模块中第i个模块驱动力的不相似性的平方和的最大值。
 | (7) |
 | (8) |
建立模块划分的目标函数为
 | (9) |
其约束条件为
 | (10) |
2.1.2 模型求解 根据所建立的数学模型,模块划分问题转化为最优化求解问题,在满足约束条件的前提下寻找的最大Z值。Z值越大,模块划分的结果关于功能和稳定性最大。由于模块划分过程中模块的数量和模块中的组件数量是变化的,因此采用本文采用经过改进的组遗传算法(Grouping Genetic Algorithm, GGA)进行模块划分的聚类求解。GGA的求解流程如图 2所示,包括基因编码,交叉、变异、遗传等操作,与常规遗传算法不同的是,GGA以组为单位进行上述操作。根据遗传算法的求解结果,将不同的组件聚类为模块。
 |
| 图 2 GGA求解流程 Fig. 2 Solving process for GGA |
| 图选项 |
2.2 控制器和软件模块设计 控制器模块划分的粒度与机械结构保持一致,根据机械结构与控制器之间的接口可以完成控制器的模块划分。为了实现控制系统的重构功能,采用具有标准接口的分布式现场总线控制系统结构。控制器模块均作为独立的网络节点,通过标准化的网络接口连接到现场总线实现控制网络。
缠绕机的控制器主要分为:基于模拟信号的控制器和基于总线通信的控制器,针对2类控制器,分别设计标准化的与主控制器之间的接口,以便在完成机械结构重构以后实现控制系统的快速重构。
对于模拟量输入输出、数字量输入输出类型的传感器和驱动器,其接口设计如图 3所示,包括通信接口、电源接口、信号输入/输出接口和调试接口,通信接口用于向现场总线发送和接收传感器信号和控制指令,用于接收传感器信号时,微处理器采集传感器的信号,根据配置文件将传感器信号转换为物理信号,通过通信接口上传到控制软件;用于控制驱动信号时,微处理器接收现场总线的控制指令,并根据配置文件转换为相应的驱动信号驱动电机运行。
 |
| 图 3 模拟量/数字量控制器接口设计 Fig. 3 Interface design for analog/digital controller |
| 图选项 |
用于协议转换的控制器接口设计如图 4所示,控制器的主要功能是将现场总线的控制指令转换为电机驱动器的控制指令,通过协议转换电路实现通信端口的电平转换和控制指令编码。
 |
| 图 4 通信协议转换控制器接口设计 Fig. 4 Interface design for communication protocols converter |
| 图选项 |
根据控制器的硬件组成和工艺参数要求,缠绕机的软件模块主要包括:通信管理模块、温度控制模块、张力控制模块和运行状态检测模块。根据不同的控制算法和输入输出条件分别设计不同功能的软件模块。
3 模块配置 3.1 机械系统模块配置 工艺参数调节系统的性能矢量为
 |
采用层次分析法,其权重为
 |
模块实例和产品每一项性能的相关度矩阵Mp可以表示为
 | (11) |
式中:τij, k为第i个模块的第j个实例与第k项性能的相关度。
客户对于所定制的产品需求矢量为
 |
采用层次分析法,其权重为
 |
产品需求和系统性能的相关度矩阵MC可以表示为
 | (12) |
式中:γij为第i项系统性能和第j项产品需求之间的相关度。
根据相关度矩阵和权重值,针对需求矢量Cr的系统性能为
 | (13) |
式中:F为系统性能的值,值越大表示系统的性能越好;σij为二元决策变量,表示模块实例在配置产品的存在性,σij=1表示第i个模块的第j个实例被配置在产品中,σij=0表示第i个模块的第j个实例不被配置在产品中。
除了产品性能以外,生产成本是缠绕机系统设计过程中的另外一个考虑因素。第i个模块中第j个实例的成本为
 | (14) |
式中:CM为生产过程中的材料成本;CE为生产过程中的维护成本,包括轴承、电机、传感器等在高温环境中工作的维护成本;CR为设备维护清洗时间;Cr为单位时间的人工成本。
由此可以得到产品配置的生产成本为
 | (15) |
式中:Ca为模块的装配重组成本。由此,可以得到模块化产品配置的目标函数为
 |
约束条件为
 | (16) |
式中:MCO为核心模块的数量,每个核心模块必须选择一个实例;Mi为第i个模块的实例数量;MO为可选模块的数量,每个可选模块最多选择一个实例;Mk为第k个模块的实例数量;Cmax为客户所能接受的最大生产成本。
为了解决模块配置中的多目标优化问题,采用基于快速分类的非支配遗传算法(NSGA-Ⅱ)[19]搜索Pareto前沿。适应度的值由非支配排序级别确定,该排序级别使用快速非支配排序机制和不需要外部参数的拥挤距离以避免对于目标的偏好,并且使用精英策略以防止优秀个体的丢失。
3.2 控制系统模块配置 根据机械结构的模块配置,根据机电接口可以确定控制器的重构形式,并通过现场总线重构组成新的控制网络。控制系统需要根据所连接的网络节点,进行控制模式识别和软件重构。控制系统的模块化配置方法如图 5所示。控制器作为独立的网络节点通过网络接口连接到上行总线和下行总线,并通过网络控制器与控制软件交换数据,控制模块具有唯一的ID标识。控制软件首先通过ID标识扫描控制模块的连接状态,根据预先定义的控制模式数据库和控制模块的特征进行控制模式分类。首先根据控制特征搜索数据库中的相同项,如果数据库中不存在相同项,采用k近邻(kNN)方法进行控制模式分类。控制软件解析控制模式脚本,采用基于COM组件的重构方法对控制器之间的连接关系和数据交换进行动态重构,进而进行软件重构生成软件控制系统。最后通过白盒测试和黑盒测试对控制系统功能的完整性和组件状态转移关系的正确性进行验证,通过测试后形成功能完整的工艺参数调节系统的控制系统重构。
 |
| 图 5 控制系统的模块化配置方法 Fig. 5 Modular configuration method for control system |
| 图选项 |
3.2.1 控制模式设计 在缠绕机工艺参数调节系统中,工艺流程和传感/驱动组件的不同,导致其控制模式各不相同,应根据控制器的重构形式和连接数量,确定其控制模式。有限状态机通过节点和事件描述离散事件之间的连接关系,可以用来标识控制器之间的执行状态,即控制模式。湿法缠绕的控制模式如图 6所示。
 |
| 图 6 湿法缠绕控制模式 Fig. 6 Control pattern for wet winding |
| 图选项 |
3.2.2 控制模式分类方法 采用kNN方法根据控制器的连接状态进行控制模式分类。由n个特征组成的向量Pi=(pi1, pi2, …, pin)表示一种控制模式,控制模式的训练样本集合为Q={(Pi, Li), i=1, 2, …, K},其中K为控制模式的样本数量,Li为控制模式类型标签,i=1, 2, …, M,M为控制模式类型的数量。为了进一步提高kNN方法的准确度,采用加权kNN方法在基本kNN方法的基础上对k个类型标签进行相似度计算,其具体的计算流程为:
1) Px为待分类的控制模式的向量,Lx为控制模式的标签。首先计算训练样本集合Q中的向量与Px之间的距离
 | (17) |
将距离排序,取距离最近的k+1个近邻样本,近邻样本的集合为Q'={(Pi', Li'), i=1, 2, …, k+1}。
2) 取集合Q'的最大样本距离,即第k+1个样本与Px的距离将前k个样本距离进行归一化处理。
 | (18) |
3) 引入高斯核函数,将归一化的Px与k个近邻样本的距离转化为样本之间的相似概率pxi
 | (19) |
4) 根据近邻样本的相似概率,求出Px为控制模式Li的概率为
 | (20) |
式中:σ为二值函数
 | (21) |
根据式(20)求出Px为控制模式为Li的概率,取概率的最大值即Px的控制模式,
 | (22) |
3.2.3 加权kNN方法准确率分析 根据已知的控制特征和控制模式生成训练样本集合Q,Q中共包含1 569个训练样本,在MATLAB中进行分类准确性分析。针对控制特征向量Px,首先在Q中检索相同样本,保证Px?Q时准确率达到100%,如果不存在,则采用加权kNN方法进行分类。在1 569个训练样本中分别随机挑选100和200个样本作为测试样本,测试不同k取值下加权kNN方法的准确率,测试结果如表 1所示。
表 1 不同测试样本数量和k值的加权kNN方法准确率 Table 1 Woighted kNN method accuracy for different test sample sizes and values of k
| 样本数量 | 加权kNN方法准确率/% | ||
| k=5 | k=7 | k=9 | |
| 100 | 94 | 91.3 | 93.3 |
| 200 | 92.7 | 92.3 | 91.5 |
表选项
从表 1可以看出,加权kNN方法的准确率较高,且对样本数量和k值具有较好的鲁棒性。然而由于加权kNN分类方法仍然存在一定的错误率,因此,在完成控制系统和软件重构后,应通过一定的测试用例测试控制模式的分类准确性。
3.2.4 软件重构方法 控制软件解析控制模式脚本,根据模块之间的状态转移顺序动态调用不同的软件模块。软件重构模型如图 7所示,先将软件功能进行模块化设计,减小模块之间的耦合和数据交换,并将软件模块设计为COM组件,定义组件接口。COM组件作为客户组件,软件控制系统的主控模块作为服务器对客户组件进行管理,根据控制模式的不同,服务器进行客户组件的添加、删除和通信等操作,从而实现操作模式的动态构建。客户组件之间的连接关系和执行顺序存储在控制模式脚本中,服务器通过解析控制模式脚本对客户组件之间的执行顺序进行控制。
 |
| 图 7 软件重构模型 Fig. 7 Reconfiguration model for software |
| 图选项 |
COM组件的通信包括客户与服务器的通信以及客户与客户之间的通信,通信模型如图 8所示。COM服务器通过事件队列管理客户组件的事件消息,通过软件数据总线管理数据的访问,数据通过数据类型变量保存在数据总线上。根据数据传递方向的不同,客户组件与服务器之间的通信方式分为:服务器调用客户组件并将参数传递给客户组件;客户组件将运算结果等数据发送至服务器以供其他组件调用。服务器调用客户时,通过客户组件提供的访问接口调用相应的方法,客户组件从数据总线读取相关的数据;客户组件运算完成后,将运算结果发送至数据总线,同时生成事件消息通知服务器。
 |
| 图 8 COM组件通信模型 Fig. 8 Communication model for COM component |
| 图选项 |
客户组件之间的通信通过事件槽技术实现,而不采用组件之间直接通信的方式,以减小组件之间的耦合,便于控制软件的重构。当组件1需要读取组件2的数据时,组件1向服务器发送请求数据读取事件,服务器接收到该事件以后从组件2读取数据,并存储至数据总线,然后服务器将数据写入组件1。
4 案例分析 根据本文所提出的模块划分和模块配置方法,针对不同的产品需求(天线支撑杆、预浸料、筒形壳体)进行案例分析研究。首先采用模块划分方法将组件聚类为具有标准接口的模块,并设计不同功能的模块实例;然后根据产品需求的变化进行模块选择,完成机械结构和控制系统的功能重构。
4.1 模块划分 根据第2节所提出的模块划分方法,采用MATLAB软件设计优化算法。根据首先缠绕机由多辊系组成的特点,将缠绕机以辊轮为基本单位分为30个独立的组件,建立组件的综合关联矩阵Y;然后确定影响全寿命周期稳定性的模块驱动力包括:运动可靠性和平稳性、技术提高和技术革新,加工质量保证,快速服务和维修,纤维磨损,组件寿命。确定组件和模块驱动力关联矩阵Fs,并采用层次分析法求解模块驱动力的权重为ω=(0.269 9, 0.203 1, 0.051 9, 0.071 6, 0.333 5, 0.070 0)。根据模块划分数学模型,采用GGA进行组件参数,GGA的参数如下:初始种群大小为200,迭代次数为100,交叉概率为0.4,变异概率为0.2,其中交换操作概率为0.5,分割和合并操作概率为0.5,稳定性相关的模块驱动力矩阵的权重值ωr=0.5,与功能和几何位置相关的关系矩阵的权重值ωc=0.5,模块数量最小值Kmin=3,模块数量最大值Kmax=27。采用GGA的适应度函数值随迭代次数的变化结果如图 9所示。
 |
| 图 9 GGA优化结果 Fig. 9 GGA optimization results |
| 图选项 |
从图 9可以看出,GGA在迭代次数为28时收敛到目标函数的最大值,近似最优解的值为Z=0.627 2。根据GGA的优化结果,最终聚类得到7个模块:放卷模块、单束张力测量模块、浸胶模块、含胶量调整模块、集束张力调整模块、速度和集束张力测量模块、丝嘴集束模块。对每一个模块设计不同的功能实例,放卷模块根据放卷力矩施加方式和是否改变纤维传动方向设计6个实例;单束张力测量模块根据不同响应速度设计2个实例;浸胶模块根据浸胶工艺的不同设计3个实例;含胶量调整模块根据含胶量调节方式设计2个实例;集束张力调整模块根据张力施加大小设计6个实例;速度和集束张力测量模块根据测量形式设计3个实例;丝嘴集束模块根据展纱功能设计2个实例。实例之间的辊轮采用相同的安装接口。
4.2 天线支撑杆缠绕的模块配置 采用多丝束高模量碳纤维进行双工位天线支撑杆的同步缠绕,所定制的产品需求为:缠绕工艺为热熔法,放卷辊数量为10,胶液类型为氰酸酯树脂,碳纤维型号为M55J,缠绕线型为45°螺旋缠绕。
4.2.1 机械系统配置 工艺参数调节系统的性能要求包括:温度,纤维磨损,参数控制精度,设备体积,维护性,纤维展开宽度,运动的平稳性和稳定性,生产效率。通过分析,可以得到每一个模块实例和产品性能的相关度矩阵Mp、产品需求和系统性能的相关度矩阵MC,并采用层次分析法分别得到产品需求的权重值WC和系统性能的权重值WP。根据式(14),可以计算每一个模块实例的成本。根据模块配置数学模型,采用NSGA-Ⅱ进行多目标优化求解,优化参数设置如下:初始种群大小为60,迭代次数为100,交叉概率为0.6,变异概率为0.02。成本和性能的变化曲线如图 10所示。
 |
| 图 10 天线支撑杆缠绕的NSGA-Ⅱ优化结果 Fig. 10 NSGA-Ⅱ optimization results for aerial studdle winding |
| 图选项 |
从图 10可以看出,当迭代次数大于30时,成本和性能均收敛到稳定值,说明已经收敛到最优边界。根据优化结果,得到各个模块实例的配置方案,将实例之间进行组合得到模块实例的连接关系如图 11所示。力矩电机放卷装置和称重传感器单束张力测量装置组成闭环反馈系统控制纤维的张力保持稳定,并使10束纤维张力保持均匀,然后10束纤维经过浸胶模块完成浸胶过程,浸胶辊在设定的温度下实现含胶量调整,磁粉离合器为集束纤维增大张力,并将速度和集束张力测量模块作为反馈装置控制10束纤维的总张力,最后通过丝嘴集束模块缠绕到芯模表面。
 |
| 图 11 天线支撑杆缠绕模块之间的拓扑关系 Fig. 11 Topological relationship between modules for aerial studdle winding |
| 图选项 |
4.2.2 控制系统配置 根据机械系统的模块配置结果,将对应的控制器连接到现场总线,控制系统检测控制器的连接状态,根据控制特征采用加权kNN方法进行控制模式分类。在缠绕机控制系统中,控制模式的划分特征为:放卷形式,放卷数量,断纱检测,单束张力测量,单束张力施加,磁粉离合器数量,浸胶工艺,集束张力测量,速度传感器,温度控制。根据缠绕机的工艺特点,控制模式库为:湿法速度跟随,干法/半干法速度跟随,干法/半干法小张力控制,干法/半干法速度跟随和张力控制,干法/半干法多丝束张力分布式控制。分别采用有限状态机模型描述这5种控制模式。控制系统根据控制器的连接状态得到控制系统的控制特征,然后采用加权kNN方法进行分类,最终得到的控制模式为干法/半干法多丝束张力分布式控制模式,如图 12所示。首先加载系统配置,完成控制器和数据总线的初始化,然后进行辊轮的温度控制,并检测温度是否异常,最后达到设定温度以后进行芯模缠绕,系统运行过程中分别进行单束张力控制、集束张力和速度控制,并检测温度、断纱和运行状态。
 |
| 图 12 天线支撑杆缠绕的控制模式 Fig. 12 Control pattern for aerial studdle winding |
| 图选项 |
4.2.3 系统测试 控制软件根据所生成的控制模式解析COM组件之间的状态转移关系完成控制软件的重构。然而由于加权kNN方法存在一定的错误率,因此采用白盒测试和黑盒测试方法进行系统测试以保证模块化系统重构后的质量和可靠性。
白盒测试方法在软件重构阶段的主要作用是根据控制模式之间的状态转移关系,对控制系统的所有路径进行测试。该测试方法需要保证各个组件的所有执行路径全覆盖;并且针对逻辑判断条件完成测试。采用白盒测试中的路径覆盖测试方法遍历控制模式中的所有路径,根据系统的期望输出结果和实际输出结果判断组件之间的状态转移关系是否正确。
黑盒测试方法采用等价类方法验证系统的功能完整性。工艺参数调节装置的功能包括:浸胶/传导/胶槽等辊轮的加热功能,速度跟随功能,张力控制功能,状态监测功能;系统的输入条件为:温度设定值,速度设定值,张力设定值,断纱状态;系统输出为:加热器功率,辊轮温度,辊轮转速,系统张力,系统运行状态。采用等价类划分方法将输入划分等价类,并生成等价类表,根据系统的期望输出结果和实际输出结果比对判断控制系统的功能是否完整。
4.2.4 结果分析 所提出的产品需求为10束高模量碳纤维使用氰酸酯树脂进行小尺寸杆件缠绕,其工艺参数要求温度控制精度高、含胶量均匀、10束纤维张力分布均匀。采用模块化方法生成的模块配置方案中,高模量纤维易磨损,力矩电机放卷装置和称重传感器单束张力测量装置组成闭环反馈系统施加较小的传输张力,并控制每束张力保持稳定,从而使10束纤维之间的张力分布均匀。磁粉离合器辊轮、速度和集束张力测量模块能够在浸胶前施加较大的纤维张力并保持稳定。浸胶模块具有含胶量调整装置和温控装置,可以实现纤维的含胶量调整。浸胶模块、集束张力调整模块和丝嘴集束模块均具备加热功能,可以满足氰酸酯树脂的温度控制要求。控制软件重构生成的控制模式实现系统温度控制、单束张力控制、速度和张力控制,使温度和张力保持稳定。因此本文模块化缠绕机设计方法能够根据产品的需求快速实现功能重构,并满足缠绕制品的工艺参数要求。
4.3 预浸料缠绕的模块配置 湿法缠绕生产预浸料的工艺过程简单,生产效率高,所定制的预浸料产品需求为:缠绕工艺为湿法;放卷辊数量为2;胶液类型为环氧树脂;碳纤维型号为T800;缠绕线型为90°缠绕,缠绕模具为圆筒,直径为1 800 mm。
在模块化配置方法中,模块实例和产品性能的相关度矩阵Mp和模块实例的成本均保持不变。根据预浸料的需求计算产品需求和系统性能的相关度矩阵MC,并采用层次分析法分别得到产品需求的权重值WC和系统性能的权重值WP。在湿法缠绕工艺中,WC=(0.284 5, 0.132 4, 0.105 3, 0.169 8, 0.308 0),WP=(0.021 0, 0.079 8, 0.056 1, 0.107 3, 0.216 7, 0.197 4, 0.095 4, 0.226 3),采用NSGA-Ⅱ进行多目标优化求解得到性能和成本的变化曲线如图 13所示。
 |
| 图 13 湿法缠绕的NSGA-Ⅱ优化结果 Fig. 13 NSGA-Ⅱ optimization results for wet winding |
| 图选项 |
从图 13可以看出,当迭代次数大于37时,成本和性能均收敛到稳定值。根据优化的模块实例的配置方案,将实例之间进行组合得到模块实例的连接关系如图 14所示,2束碳纤维通过摩擦带放卷装置施加一定的纤维张力,通过浸胶装置实现树脂和纤维的混合,然后通过含胶量调整装置和展纱装置调节展纱宽度后缠绕到芯模表面。
 |
| 图 14 湿法缠绕模块之间的拓扑关系 Fig. 14 Topological relationship between modules for wet winding |
| 图选项 |
根据机械结构的模块化配置结果将控制器连接到现场总线,根据控制特征采用kNN方法得到的控制模式为:湿法速度跟随。如图 6所示,控制软件根据所生成的控制模式解析COM组件之间的状态转移关系完成控制软件的重构。湿法缠绕时控制系统的主要功能为控制浸胶辊的速度跟随芯模的缠绕速度。
4.4 筒形壳体缠绕的模块配置 筒形壳体采用高强度纤维和氰酸酯树脂在较大的张力下进行缠绕成型,所定制的筒形壳体的产品需求为:缠绕工艺为热熔法, 放卷辊数量为1, 胶液类型为氰酸酯树脂, 碳纤维型号为T800, 缠绕线型为30°螺旋缠绕。在筒形壳体缠绕工艺中,WC=(0.390 8, 0.102 7, 0.197 2, 0.204 3, 0.105 0),WP=(0.127 7, 0.236 1, 0.246 3, 0.053 5, 0.065 1, 0.058 0, 0.157 01, 0.056 4),采用NSGA-Ⅱ进行多目标优化求解得到性能和成本的变化曲线如图 15所示。
 |
| 图 15 筒形壳体缠绕的NSGA-Ⅱ优化结果 Fig. 15 NSGA-Ⅱ optimization results for cylindrical shell winding |
| 图选项 |
从图 15中可以看出,当迭代次数大于22时,成本和性能均收敛到稳定值。根据优化的模块实例的配置方案,将实例之间进行组合得到模块实例的连接关系如图 16所示,放卷装置通过力矩电机施加较小的张力以减小传送过程中的纤维磨损,浸胶装置之前通过单束张力施加装置施加设定的纤维张力,并通过调节浸胶辊的电机转速实现速度跟随和张力控制,在丝嘴处对树脂进行加热以保持黏度,最终缠绕到芯模表面。
 |
| 图 16 筒形壳体缠绕模块之间的拓扑关系 Fig. 16 Topological relationship between modules for cylindrical shell winding |
| 图选项 |
根据机械结构的模块化配置结果将控制器连接到现场总线,根据控制特征采用加权kNN方法得到的控制模式为:干法/半干法速度跟随和张力控制,如图 17所示,控制软件根据所生成的控制模式解析COM组件之间的状态转移关系完成控制软件的重构。首先完成控制器和数据总线的初始化; 然后进行辊轮的温度控制,并检测温度是否异常,达到设定温度以后,根据设定的张力值控制放卷力矩电机和磁粉离合器的转矩施加纤维张力; 最后调节浸胶辊的转速跟随芯模的缠绕速度并调整传送张力使之保持稳定,在运行过程中检测断纱、温度系统的运行是否正常。
 |
| 图 17 筒形壳体缠绕的控制模式 Fig. 17 Control pattern for cylindrical shell winding |
| 图选项 |
通过对天线支撑杆、预浸料、筒形壳体缠绕的模块划分和模块配置方法的分析中可以看出,本文模块化设计方法能够根据不同的产品需求进行不同功能模块实例的最优配置,并实现机械结构、控制器和控制软件的功能重构,使缠绕机能够满足不同的缠绕工艺要求,拓展了缠绕机的功能多样性。
5 结论 本文提出缠绕机机械结构、控制器和控制软件的模块化设计方法,得出:
1) 通过定义组件之间的关联矩阵,采用GGA和NSGA-Ⅱ能够有效实现模块划分和模块重新配置。
2) 基于现场总线的开放式控制系统结构可以实现控制器的快速重构,基于COM组件技术、有限状态机可以实现软件的动态重构。
3) 采用模块化设计方法可以快速响应客户需求的变化,满足不同的缠绕工艺要求,实现缠绕机功能的快速重构。
参考文献
| [1] | 顾轶卓, 李敏, 李艳霞, 等. 飞行器结构用复合材料制造技术与工艺理论进展[J].航空学报, 2015, 36(8): 2773–2797. GU Y Z, LI M, LI Y X, et al. Progress on manufacturing technology and process theory of aircraft composite structure[J].Acta Aeronautica et Astronautica Sinica, 2015, 36(8): 2773–2797.(in Chinese) |
| [2] | SOUTIS C. Carbon fiber reinforced plastics in aircraft construction[J].Materials Science and Engineering:A, 2005, 412(1-2): 171–176.DOI:10.1016/j.msea.2005.08.064 |
| [3] | PIRAN F A S, LACERDA D P, ANTUNES J A V, et al. Modularization strategy:Analysis of published articles on production and operations management(1999 to 2013)[J].The International Journal of Advanced Manufacturing Technology, 2016, 86(1-4): 507–519.DOI:10.1007/s00170-015-8221-9 |
| [4] | HUANG C C. Overview of modular product development[J].Proceedings of the National Science Council, 2000, 24(3): 149–165. |
| [5] | LAU A K W, YAM R C M, TANG E. The impacts of product modularity on competitive capabilities and performance:An empirical study[J].International Journal of Production Economics, 2007, 105(1): 1–20.DOI:10.1016/j.ijpe.2006.02.002 |
| [6] | STONE R B, WOOD K L, CRAWFORD R H. A heuristic method for identifying modules for product architectures[J].Design Studies, 2000, 21(1): 5–31.DOI:10.1016/S0142-694X(99)00003-4 |
| [7] | KRENG V B, LEE T. Modular product design with grouping genetic algorithm-A case study[J].Computers & Industrial Engineering, 2004, 46(3): 443–460. |
| [8] | WEI W, LIU A, LU S C Y, et al. A multi-principle module identification method for product platform design[J].Journal of Zhejiang University-Science A(Applied Physics & Engineering), 2015, 16(1): 1–10. |
| [9] | JOSE A, TOLLENAERE M. Modular and platform methods for product family design:Literature analysis[J].Journal of Intelligent Manufacturing, 2005, 16(3): 371–390.DOI:10.1007/s10845-005-7030-7 |
| [10] | KIMURA F, KATO S, HATA T, et al. Product modularization for parts reuse in inverse manufacturing[J].CIRP Annals-Manufacturing Technology, 2001, 50(1): 89–92.DOI:10.1016/S0007-8506(07)62078-2 |
| [11] | HUANG C C, KUSIAK A. Modularity in design of products and systems[J].IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 1998, 28(1): 66–77.DOI:10.1109/3468.650323 |
| [12] | 高飞, 肖刚, 潘双夏, 等. 产品功能模块划分方法[J].机械工程学报, 2007, 43(5): 29–35. GAO F, XIAO G, PAN S X, et al. Method of product function module partition[J].Chinese Journal of Mechanical Engineering, 2007, 43(5): 29–35.(in Chinese) |
| [13] | FAN B, QI G, HU X, et al. A network methodology for structure-oriented modular product platform planning[J].Journal of Intelligent Manufacturing, 2015, 26(3): 553–570.DOI:10.1007/s10845-013-0815-1 |
| [14] | PANDREMENOS J, CHRYSSOLOURIS G. A neural network approach for the development of modular product architectures[J].International Journal of Computer Integrated, 2011, 24(10): 879–887.DOI:10.1080/0951192X.2011.602361 |
| [15] | KRENG V B, LEE T P. MPD with grouping genetic algorithm:A case study[J].Computers and Industrial Engineering, 2004, 46(3): 443–460.DOI:10.1016/j.cie.2004.01.007 |
| [16] | 陆良, 杨殿阁, 顾铮珉, 等. 采用模块化思想的汽车电器智能化设计方法[J].西安交通大学学报, 2010, 44(5): 111–115. LU L, YANG D G, GU Z M, et al. Designing strategy for smart vehicle electrical/electronic devices based on modularization[J].Journal of Xi'an Jiaotong University, 2010, 44(5): 111–115.DOI:10.7652/xjtuxb201005023(in Chinese) |
| [17] | PRITSCHOW G, KIRCHER C, KREMER M, et al. Control systems for RMS and methods of their reconfiguration[M].Berlin: Springer, 2006: 195-211. |
| [18] | 何岭松, 张登攀, 赖红. 可重构虚拟仪器系统[J].机械工程学报, 2005, 41(9): 78–81. HE L S, ZHANG D P, LAI H. Reconfigurable virtual instrument system[J].Chinese Journal of Mechanical Engineering, 2005, 41(9): 78–81.(in Chinese) |
| [19] | DEB K, PRATAP A, AGARWAL S, et al. A fast and elitist multiobjective genetic algorithm:NSGA-Ⅱ[J].IEEE Transactions on Evolutionary Computation, 2002, 6(2): 182–197.DOI:10.1109/4235.996017 |
