在HV制导过程中,由于其倾侧角多次进行反转,大横程需求的飞行轨迹跟踪控制方法较难实现。Roenneke和Cornwell[19]将该问题映射为阻力面内的调节器问题,具体是采用线性二次型调节器研究设计的轨迹跟踪控制器。Mease等[20]采用近似反馈线性化方法,将HV的纵向轨迹跟踪的局部跟踪改进为全局跟踪,有效地提升了跟踪性能。Lu等[21-22]通过解析HV的纵程与阻力加速度,使用序列二次规划方法优化阻力面内的加速度,设计非线性预测控制器(Nonlinear Predictive Controller,NPC)进行HV轨迹跟踪。
NPC设计的主要难点为选择设计代价函数和相应的优化方法。这将直接影响轨迹跟踪精度以及跟踪的实时性。可将优化方法划分为“精确优化”和“近似优化”。“精确优化”的优势是精度高,不足是计算量大,耗时多。“近似优化”相对精度低,但实时性强。目前,“近似优化”主流采用NPC设计。
Joos等[23]将代价函数用雅可比矩阵线性化,然后采用NPC跟踪轨迹,但其计算量大,实时性不能保证。Chen和Allg?wer[24-25]采用泰勒展开式近似代价函数,该方法仅适用于单输入单输出的控制中。Slegers等[26]将Chen和Allg?wer[24-25]的控制方法扩展到多输入多输出系统的控制中。Hess和Jung[6, 27]取系统的5个动态平衡点,采用插值的方法得到系统的近似模型。以上非线性控制方法的共性是将系统模型近似为简单易求出优化近似解的近似模型,且为了保证时效性,需根据预定的轨迹及设定的环境模型,离线计算参数,但对于实时规划的轨迹误差较大。因此,本文提出了一种基于虚拟域预测控制的轨迹跟踪方法,该方法使用多项式近似系统模型,引入虚拟域及反动力方法,时效性强,能够在线计算模型参数,能有效跟踪实时规划的轨迹。
1 轨迹跟踪方法 1.1 轨迹跟踪控制器实现方案 一般非线性预测控制器的流程如图 1实线所示,控制量的求解可归结为非线性规划问题。控制器设计的原理为:与文献[28]同样采用多项式近似系统模型,在此基础上,将虚拟弧长τ作为多项式变量,以Δτ为步长对模型进行离散化,运用反动力学的方法求解多项式参数。在求解非线性规划问题上,以Δτ为预测控制滚动优化的节点,求解控制量并应用于系统。将虚拟弧长τ定义为λ(τ)=dτ/dt,λ为虚拟速度。当且仅当虚拟速度等于现实速度,即λ(τ)=V(t),则虚拟弧长τ等于现实弹道弧长。多项式参数除了可以定义为本文的虚拟弧长,也可以定义为时间等连续单调的变量。文献[24-25]以时间为变量,近似系统模型。本文则使用虚拟弧长τ作为多项式中的变量,这可将时域上控制问题转化为虚拟域τ上,其最大的优势是解耦效果好,时效性强。因轨迹跟踪对控制量的波动要求较小,传统的非线性控制需设置终端域[26],本文通过反动力学解算、非线性规划的输入设置可直接得到连续的控制量,这从根本上保证了控制量的连续性,而非传统终端域的“软约束”。本文将控制器设计分为多项式近似及反动力学解算、滚动优化、反馈校正3个部分,详见1.2~1.4节。
 |
| 图 1 控制器实现流程图 Fig. 1 Flowchart of controller realization |
| 图选项 |
1.2 被控模型近似
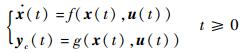
1.2.1 虚拟域内的多项式近似方法 拦截弹质心的运动学方程与动力学方程是连续可微的非线性模型,可采用连续时间模型描述拦截弹的运动学与动力学,如式(1) 所示。
 | (1) |
式中:x(t)∈Rn为状态向量; u(t)∈Rm为控制输入向量; yc(t)∈Rc为控制输出。并且控制量约束为
 | (2) |
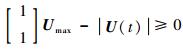
控制输出可根据实际选择为拦截弹的参考轨迹或者航程、末端速度。定义拦截弹的参考轨迹zr=[xi, r, Vr, γr, ψr],i=1, 2, 3为控制输出(xi, r为拦截弹3轴位置,V为拦截弹速度,γ为拦截弹路径倾角,ψ为拦截弹路径偏角,下标r表示“参考”)。控制输入选取拦截弹的侧向过载ny、法向过载nz,定义U=[ny, nz]T,满足约束方程
 | (3) |
式中:Umax为控制量的最大值。
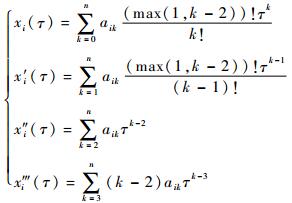
式(1)~式(3) 为拦截弹质心的运动学方程、动力学方程在时域t中的表现形式。为将其转化到虚拟域τ内,引入虚拟变量τ,采用高阶多项式近似状态量与控制量。拦截弹的位置、速度、加速度、急动导近似如式(4) 所示。
 | (4) |
式中:aik为多项式系数,k=0, 1, …, n。
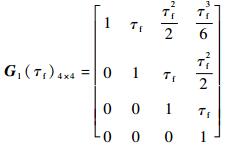
1.2.2 τ域内控制输入及控制输出计算 若已知模型的初始条件xi0,x′i0,x″i0,xi0''',终端条件xif,x′if,x″if,xif''',将式(4) 写成矩阵形式,如式(5) 所示。本文选取7阶多项式近似系统模型[28],其中下标f表示终端。
 | (5a) |
 | (5b) |
 | (5c) |
 | (5d) |
 | (5e) |
 | (5f) |
根据式(5),求出多项式系数C8×1,得到了系统状态关于轨迹弧长τf的表达式。状态量Vr、γr、ψr及控制输入在笔者之前的研究工作中已经体现,如文献[18]中式(8)~式(17),也是以τf为变量的离散函数。若将轨迹弧长τf作为代价函数(Cost Function,CF)的优化参数,以Δτ为步长,使用最优化方法,求出τf即可。这就将时域内的优化问题转化到τ域内的优化问题,为与时域区分开,每一个τ称之为节点,对应时域的时刻。CF的定义与优化方法在1.3节研究。
1.3 滚动优化 文献[5, 28-30]使用虚拟域动态逆的方法产生参考轨迹及控制输入U,并将控制量U全部作用于系统。因为控制输入与控制输出的计算是基于理论模型,而在实际制导过程中,由于模型失配及外部干扰的影响,导致实际轨迹与参考轨迹存在某种偏差。如果将全部的控制量U作用于系统,可能导致系统系能变坏甚至失稳[31],并且使用控制输入U会导致静态误差[8, 32]。因此,考虑能否将有限时域内的控制输入作用于系统,随着飞行时间推移,预测时域P也向前滚动,并使用控制增量ΔU减小或消除静态误差。下面给出在τ域内滚动优化策略,如图 2所示,z为拦截弹状态量。
 |
| 图 2 τ域内滚动优化策略 Fig. 2 Rolling optimization strategy in domain τ |
| 图选项 |
在τ域内,在每一个节点k,确定从该节点起的M个控制增量Δu(k),Δu(k+1),…,Δu(k+M-1),使被控对象在其作用下未来P个节点的实际输出z尽可能接近给定的参考输出zr(k+l),l=1, 2, …, P。M与P分别称为控制τ域与预测τ域。通常规定M≤P。
为了寻找最佳的控制输入使得实际的系统输出尽可能的跟踪参考输出,为此用实际输出与参考输出之间的累积误差定义一个CF,并且如果不希望控制增量Δu变化过于剧烈,常规文献[23-24, 31-33]的做法是在CF中加入软约束(等式右端第2项),如式(6) 所示。
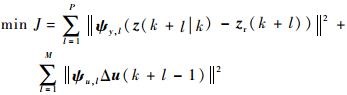 | (6) |
式中:
 |
其中:ψyj, l为在预测时刻l对预测控制输出第j个分量误差的加权因子,j=1, 2, …, nc;ψuj, l为在预测时刻l对控制增量第j个分量误差的加权因子,控制加权因子ψu, l越大,控制动作变化的越小。k+l|k表示k个节点对k+l个节点的预测。
加入软约束
 | (7) |
在第k个节点,将式(6) 的优化解Uk*的第1个分量u*(k|k)作用于系统;在第k+1个节点,以新得到的实际输出z(k+1) 为初始条件重新预测系统未来输出并求解优化问题,再将优化解Uk+1*的第一个分量u*(k+1|k+1) 作用于系统,这样重复至拦截弹与目标的遭遇点。如图 1所示,k+1节点的预测τ域仍为P,随着当前节点的向前推移,预测τ域也向前滚动。
1.4 反馈校正 工程应用中通常存在模型失配、环境干扰等影响因素,且预测值存在较大误差。因此,必须及时利用实时信息校正误差,避免出现建立在虚假信息基础上的优化结果。本节反馈校正采用常规预测控制方法,选用常系数校正量h,这里简要介绍如下,读者可参考文献[7, 33-37]进一步了解。
在第k个节点,将模型预测输出zr(k+1|k)与检测对象的实际输出z(k+1) 做差,得到输出误差。
 | (8) |
在第k+1个节点,校正输出为
 | (9) |
式中:校正量h=[h1, h2, …, hN]。
由于节点变动,预测的未来节点将移到k+2,k+3,…,k+1+N,这样整个控制回路不断在线进行这种包含反馈校正的滚动优化,其控制结构见1.5节。校正量h可根据设计者侧重点不同来确定。若设计者侧重遭遇点的位置、路径倾角与偏角误差,则可将位置误差作为控制校正的依据,将遭遇点位置误差以泰勒级数展开,忽略二阶和高阶项,通过输出误差计算出校正量h,详见文献[38-44]。若设计者关心遭遇点的航程和速度的准确性,则可将航程与速度作为校正依据,详见文献[45]。本文选取位置误差、路径倾角与偏角误差直接作为控制校正的依据,并设置权重系数。
1.5 轨迹跟踪控制结构 虚拟域的轨迹跟踪控制结构如图 3所示, zT为目标的状态量; z0为拦截弹的初始状态量。分为外环路与内环路,外环路为轨迹生成及更新环路,图 3中用阴影框与虚线表示。内环路为轨迹跟踪环路。外环路包括传感器、轨迹更新开关、轨迹发生器。传感器的作用是检测、存储目标和拦截弹的状态量,并将检测信息传输到更新开关中。更新开关的作用是在触发信号作用下重新启动轨迹生成器,并生成轨迹发生器所需要的边界条件。其输入为触发信号,包括目标的状态量zT的变化,参考轨迹于实际轨迹偏差过大,预测控制器失败。轨迹生成器是接收更新开关产生的边界并产生新的参考轨迹,将信息传输到轨迹跟踪环路中。
 |
| 图 3 轨迹跟踪控制结构 Fig. 3 Control architecture of trajectory tracking |
| 图选项 |
轨迹跟踪环路包括控制对象(拦截弹)、模型预测器、预测优化器。模型预测器用于预测
2 仿真验证 2.1 仿真条件 仿真目的:因本文属于两点边界的轨迹跟踪问题, 故在初始条件添加扰动及末端状态改变的情况下,验证本文提出的轨迹跟踪方法能否达到指定的脱靶量、末端路径倾角误差,路径偏角误差。特别指出的是:因本文以拦截弹道导弹为背景,将拦截弹的末端路径倾角及路径偏角作为约束条件,以达到指定的末端约束碰撞角,能够有效提高拦截弹的作战效能。
在初始条件添加扰动的仿真验证中,与非线性反馈(Feedback Control,FL)[20]跟踪方法对比。FL的控制方法的优势是计算时效性强,是非线性控制的经典方法。仿真着重研究跟踪算法计算时间(平均每个节点CPU的计算时间),末端输出误差。文献[20]中FL是使用攻角和倾侧角作为控制量。为保证对比条件的一致性,也使用侧向过载和法向过载作为控制量。攻角、倾侧角与侧向过载、法向过载的转化关系请参考文献[28]。
末端条件改变的仿真验证中,因末端条件改变将作为已知条件输入模型。着重研究曲线的过度及末端输出误差。故只需验证本文提出跟踪算法的可行性。
仿真背景:空基发射拦截弹拦截非机动目标,拦截弹的初始俯仰角为0°,速度为100 m/s。在拦截弹发射3 s后,使用变节点虚拟域方法[18]开始优化弹道,使用本文提出的跟踪方法跟踪轨迹。拦截弹模型、大气模型等请参阅文献[11]。
仿真环境:操作系统为Vxworks 6.1,使用Fortran语言编写程序,编译器为GFORTRAN。CPU主频3.5 Hz,内存16 GB。
仿真参数:仿真步长dt=0.001 s,仿真节点数N=100,h为单位向量,Umax=30g,P=5,M=2。仿真边界条件如表 1、表 2所示。
表 1 拦截弹初始条件 Table 1 Initial conditions for interceptor
| 参数 | 数值 |
| 位置(x, y, z)/km | (100, 100, 8.460) |
| V/(m·s-1) | 566 |
| γ/(°) | 0 |
| ψ/(°) | -133 |
表选项
表 2 拦截弹末端条件 Table 2 Final conditions for interceptor
| 参数 | 数值 |
| (x, y, z)/km | (20.533, 0, 29.216) |
| γ/(°) | 0 |
| ψ/(°) | -107.647 |
表选项
2.2 初始条件下的小扰动仿真 对初始条件分别添加位置扰动,速度扰动,路径倾角扰动,路径偏角扰动,验证制导律性能。遭遇点的约束条件如表 2所示。扰动量及输出误差如表 3所示。输出误差是与基线(Base case)(基线是不添加扰动时,使用节点数生成的轨迹)对比得到,表 3中的“%”为相对于基线添加的正向扰动百分比。
表 3 初始小扰动及终端输出误差 Table 3 Different initial minor disturbances and corresponding output errors at end of interception
| 方案 | (x, y, z)/km | V/(m·s-1) | γ/(°) | ψ/(°) | 脱靶量/m | Eγ/(°) | Eψ/(°) | CPU计算时间/s |
| 1 | (105, 105, 8.883)(+5%) | 566 | 0 | -133 | 0.231 | 0.119 | 0.163 | 0.011 5 |
| 2 | (100, 100, 8.460) | 594.3(+5%) | 0 | -133 | 0.437 | 0.147 | 0.203 | 0.014 5 |
| 3 | (100, 100, 8.460) | 566 | 2 | -133 | 0.195 | 0.298 | 0.097 | 0.013 7 |
| 4 | (100, 100, 8.460) | 566 | 0 | -130.3(+2%) | 0.275 | 0.147 | 0.359 | 0.013 9 |
| 5 | (105, 105, 8.883)(+5%) | 594.3(+5%) | 2 | -130.3(+2%) | 0.493 | 0.510 | 0.529 | 0.015 2 |
| FL[20] | (105, 105, 8.883)(+5%) | 594.3(+5%) | 2 | -130.3(+2%) | 1.543 | 1.589 | 1.641 | 0.009 2 |
表选项
由表 3可以看出,对初始位置、速度、路径倾角、路径偏角分别添加2%的正向扰动,如方案1~4,脱靶量、路径倾角误差(Eγ=|γ-γr|)及路径偏角误差(Eγ=|ψ-ψr|)较小;如果对初始状态量全部添加2%的正向扰动,如方案5,则误差稍大于方案1~4,但仍然可以满足制导精度要求。与FL[20]跟踪方法相比,输出误差较小,但是CPU计算时间略大。
在初始条件添加小扰动的曲线仿真结果,如图 4和图 5所示。本文提出的跟踪方法在初始点扰动时,并不改变曲线的整体“形态”,曲线平滑, 但对于FL[20],曲线略有波动。曲线平滑是因为随着飞行时间推移,预测时域P也向前滚动,将较小时域内的控制输入作用于系统,故实际曲线逐渐向基线汇聚。而FL[20]是曲线突然跳跃,而后经过一个过渡过程后,才能准确跟踪基线。并且在曲线变化率较大的地方,跟踪效果较差。这也是造成末端误差较大的原因之一。FL[20]的CPU计算时间较少是因为其不需要通过非线性规划的方法求解CF,即“滚动优化”这一过程,仅通过状态反馈进行控制。
 |
| 图 4 拦截弹轨迹 Fig. 4 Trajectories of interceptor |
| 图选项 |
 |
| 图 5 拦截弹路径倾角、路径偏角、速度、侧向过载及法向过载变化 Fig. 5 Trajectory angle, yaw angle, velocity, side load and normal load variation of interceptor |
| 图选项 |
由图 4、图 5(a)和图 5(b)可知,在初始小扰动的情况下,拦截弹轨迹、路径倾角、路径偏角虽在初始状态略有不同,但随着时间推移,方案1~5及FL[20]的曲线与基线在遭遇点基本重合。
图 5(c)为拦截弹速度变化曲线。由图 5(c)可知,拦截弹速度先增大,在20 s左右逐渐减小。改变速度主要原因是导弹轴向过载(本文中轴向过载是由两级火箭提供),法向过载与侧向过载影响较小,因此,速度曲线簇较为紧密。
图 5(d)和图 5(e)为拦截弹侧向过载、法向过载的变化曲线,即控制量变化曲线。在初始时刻、波峰、波谷,FL[20]为迅速跟踪基线,大幅度调整控制量,导致波动较大。方案1~5的曲线平滑,能逐渐跟踪基线,且在约束范围内, 以渐进的方式跟踪基线可以减小发动机方向调节能力及控制。
2.3 末端条件改变的轨迹重生仿真 当参考轨迹与实际轨迹偏差过大,预测优化失败或者目标状态发生改变,轨道发生器将重新生成轨迹。本节验证末端条件的改变的制导特性。为避免剩余拦截时间因素的影响,故只考虑遭遇点位置的改变。遭遇点位置的改变量,改变时刻及输出结果如表 4所示。在3 s,20.1 s,30.8 s时,遭遇点位置改变,拦截弹重新生成轨迹。由表 4可见,脱靶量及末端约束角能满足制导律要求。
表 4 遭遇点位置改变及终端输出误差 Table 4 Changes of point encounter position and corresponding output errors at end of interception
| 方案 | 时间/s | 拦截弹位置/km | 目标位置/km | 脱靶量/m | Eγ/(°) | Eψ/(°) |
| 1 | 3 | (104.383, 104.337, 8.481) | (20, 0, 29) | 0.193 | 0.119 | 0.163 |
| 2 | 20.1 | (76.923, 77.943, 11.649) | (14.6, 0, 20) | 0.165 | 0.127 | 0.161 |
| 3 | 30.8 | (45.648, 50.222, 18.144) | (11, 0, 15) | 0.183 | 0.115 | 0.174 |
表选项
图 6和图 7为仿真曲线结果。为清楚起见,由于跟踪曲线与实际曲线较紧密,故只给出轨迹重生时刻到拦截目标时刻的3种方案的变化曲线。由图 6可见,拦截弹轨迹在3、20.1、30.8 s根据遭遇点位置的变化生成了3条轨迹,且在轨迹重生点,轨迹过渡圆滑。图 7(a)和图 7(b)分别为拦截弹路径倾角、路径偏角的变化。拦截时间不同是因为弹目距离的变化导致。
 |
| 图 6 遭遇点位置改变时的拦截弹轨迹 Fig. 6 Trajectories of interceptor when point of encounter is changed |
| 图选项 |
 |
| 图 7 遭遇点位置改变时的拦截弹路径倾角、路径偏角、速度、侧向过载及法向过载变化 Fig. 7 Trajectory angle, yaw angle, velocity, side load and normal load variation of interceptor when point of encounter position is changed |
| 图选项 |
由图 7(c)可知,拦截弹速度由500 m/s上升到4 186 m/s,在第1个重生点开始降低,到第2个重生点稍有增大而后减小到3 666 m/s。从第1个重生点至遭遇点,微小的速度变化主要是由于控制量的调节。图 7(d)和图 7(e)为控制量侧向过载与法向过载的变化曲线。
由图 7(d)和图 7(e)可见,在轨迹重生点曲率基本一致,这是因为令τ域内控制输入急动导(式(4))为0,保证了控制量U的平滑性。重生轨迹的过载曲线在遭遇点也是趋近于0,在拦截时刻较小的需用过载使拦截弹的过载裕度较大。实际拦截时,如果存在各种在拦截弹设计时未考虑的扰动,较小的需用过载可有效提高制导精度。
3 结论 设计了基于虚拟域的预测控制轨迹跟踪算法。该方法采用多项式近似状态量,将微分方程转化为代数方程。引入虚拟路径τ,将时域转化为虚拟域,结合预测控制的滚动优化——反馈校正方法,准确跟踪最优轨迹。
1) 在虚拟域内,使用多项式近似系统模型,以虚拟路径的节点为滚动优化的基准,将有限时域内的控制输入作用于系统,利用实时信息进行反馈校正,以准确跟踪预定轨迹。
2) 考虑了参考轨迹与实际轨迹偏差过大,预测优化失败或者目标状态发生改变3种情况下的轨迹跟踪问题,将轨迹控制结构分为内外环路,完成了轨迹跟踪的控制结构的设计。
3) 在初始状态量添加小扰动及末端条件改变的条件下,以拦截弹道导弹为背景,进行仿真验证。结果表明:与非线性反馈跟踪方法相比,曲线平滑,在遭遇点脱靶量、末端路径倾角及偏角误差较小,实时性也可满足控制需求。
参考文献
| [1] | HALBE O, RAJA R G, PADHI R. Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J].Journal of Guidance, Control, and Dynamics, 2013, 37(1): 134–148. |
| [2] | HARL N, BALAKRISHNAN S N. Reentry terminal guidance through sliding mode control[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1): 186–199.DOI:10.2514/1.42654 |
| [3] | 闫梁, 赵继广, 李辕. 带约束碰撞角的顺/逆轨制导律设计[J].北京航空航天大学学报, 2015, 41(5): 857–863. YAN L, ZHAO J G, LI Y. Guidance law with angular constraints for head-pursuit or head-on engagement[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5): 857–863.(in Chinese) |
| [4] | TANAKA A, MAEDA H. Studies on the time-to-go indexing control scheme for an automatic aircraft landing system[J].Transactions of the Japan Society for Aeronautical and Space Sciences, 1973, 16(31): 1–18. |
| [5] | YAKIMENKO O A.Shortcut-time spatial trajectories on-board optimization and their cognitive head-up display visualization for pilot's control actions during manoeuvring support[C]//International Congress on Instrumentation in Aerospace Simulation Facilities, 1997.Piscataway, NJ:IEEE Press, 1997:246-256. |
| [6] | JUNG Y C, HESS R A. Precise flight-path control using a predictive algorithm[J].Journal of Guidance, Control, and Dynamics, 1991, 14(5): 936–942.DOI:10.2514/3.20734 |
| [7] | GIBBENS P W, MEDAGODA E D B. Efficient model predictive control algorithm for aircraft[J].Journal of Guidance, Control, and Dynamics, 2011, 34(6): 1909–1915.DOI:10.2514/1.52162 |
| [8] | LU P, PIERSON B L. Aircraft terrain following based on a nonlinear continuous predictive control approach[J].Journal of Guidance, Control, and Dynamics, 1995, 18(4): 817–823.DOI:10.2514/3.21464 |
| [9] | LUKACS J A I, YAKIMENKO O A. Trajectory-shaping guidance for interception of ballistic missiles during the boost phase[J].Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1524–1531.DOI:10.2514/1.32262 |
| [10] | DWIVEDI P N, BHATTACHARYA A, PADHI R. Suboptimal midcourse guidance of interceptors for high-speed targets with alignment angle constraint[J].Journal of Guidance, Control, and Dynamics, 2011, 34(3): 860–877.DOI:10.2514/1.50821 |
| [11] | LU Z L.Ballistic missile interception from UCAV[D].Monterey:Naval Postgraduate School, 2011. |
| [12] | GUO Y, HAWKINS M, WIE B. Waypoint-optimized zero-effort-miss/zero-effort-velocity feedback guidance for mars landing[J].Journal of Guidance, Control, and Dynamics, 2013, 36(3): 799–809.DOI:10.2514/1.58098 |
| [13] | YU Z, CUI P, ZHU S. Observability-based beacon configuration optimization for mars entry navigation[J].Journal of Guidance, Control, and Dynamics, 2014, 38(4): 643–650. |
| [14] | BLACKMORE L, ACIKMESE B, SCHARF D P. Minimum-landing-error powered-descent guidance for Mars landing using convex optimization[J].Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1161–1171.DOI:10.2514/1.47202 |
| [15] | KLUEVER C A. Entry guidance performance for Mars precision landing[J].Journal of Guidance, Control, and Dynamics, 2008, 31(6): 1537–1544.DOI:10.2514/1.36950 |
| [16] | SHEN H, SEYWALD H, POWELL R W. Desensitizing the minimum-fuel powered descent for Mars pinpoint landing[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1): 108–115.DOI:10.2514/1.44649 |
| [17] | WINGROVE R C. Survey of atmosphere re-entry guidance and control methods[J].AIAA Journal, 1963, 1(9): 2019–2029.DOI:10.2514/3.1987 |
| [18] | 闫梁, 李辕, 赵继广, 等. 基于变节点虚拟域动态逆的轨迹实时优化[J].航空学报, 2013, 34(12): 2794–2803. YAN L, LI Y, ZHAO J G, et al. Trajectory real-time optimization based on variable node inverse dynamics in the virtual domain[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(12): 2794–2803.(in Chinese) |
| [19] | ROENNEKE A J, CORNWELL P J. Trajectory control for a low-lift re-entry vehicle[J].Journal of Guidance, Control, and Dynamics, 1993, 16(5): 927–933.DOI:10.2514/3.21103 |
| [20] | BHARADWAJ S, RAO A V, MEASE K D. Entry trajectory tracking law via feedback linearization[J].Journal of Guidance, Control, and Dynamics, 1998, 21(5): 726–732.DOI:10.2514/2.4318 |
| [21] | LU P. Entry guidance and trajectory control for reusable launch vehicle[J].Journal of Guidance, Control, and Dynamics, 1997, 20(1): 143–149.DOI:10.2514/2.4008 |
| [22] | LU P, HANSON J M. Entry guidance for the X-33 vehicle[J].Journal of Spacecraft and Rockets, 1998, 35(3): 342–349.DOI:10.2514/2.3332 |
| [23] | JOOS A, MULLER M A, BAUMGARTNER D, et al.Nonlinear predictive control based on time-domain simulation for automatic landing:AIAA-2011-6298[R].Reston:AIAA, 2011. |
| [24] | CHEN H, ALLG?WER F. Quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability[J].Automatica, 1998, 34(10): 1205–1217.DOI:10.1016/S0005-1098(98)00073-9 |
| [25] | CHEN H, ALLG?WER F. Computationally attractive nonlinear predictive control scheme with guaranteed stability for stable systems[J].Journal of Process Control, 1998, 8(5-6): 475–485.DOI:10.1016/S0959-1524(98)00021-3 |
| [26] | SLEGERS N, KYLE J, COSTELLO M. Nonlinear model predictive control technique for unmanned air vehicles[J].Journal of Guidance, Control, and Dynamics, 2006, 29(5): 1179–1188.DOI:10.2514/1.21531 |
| [27] | HESS R A, JUNG Y C. Application of generalized predictive control to rotorcraft terrain-following flight[J].IEEE Transactions on Systems, Man and Cybernetics, 1989, 19(5): 955–962.DOI:10.1109/21.44010 |
| [28] | YAKIMENKO O A. Direct method for rapid prototyping of near-optimal aircraft trajectories[J].Journal of Guidance, Control, and Dynamics, 2000, 23(5): 865–875.DOI:10.2514/2.4616 |
| [29] | BASSET G, XU Y, YAKIMENKO O A. Computing short-time aircraft maneuvers using direct methods[J].Journal of Computer and Systems Sciences International, 2010, 49(3): 481–513.DOI:10.1134/S1064230710030159 |
| [30] | BOYARKO G A, ROMANO M, YAKIMENKO O A. Time-optimal reorientation of a spacecraft using an inverse dynamics optimization method[J].Journal of Guidance, Control, and Dynamics, 2011, 34(4): 1197–1208.DOI:10.2514/1.49449 |
| [31] | LEW J, JUANG J. Robust generalized predictive control with uncertainty quantification[J].Journal of Guidance, Control, and Dynamics, 2012, 35(3): 930–937.DOI:10.2514/1.54510 |
| [32] | AVANZINI G, THOMSON D, TORASSO A. Model predictive control architecture for rotorcraft inverse simulation[J].Journal of Guidance, Control, and Dynamics, 2012, 36(1): 207–217. |
| [33] | SUN L, HEDENGREN J D, BEARD R W. Optimal trajectory generation using model predictive control for aerially towed cable systems[J].Journal of Guidance, Control, and Dynamics, 2014, 37(2): 525–539.DOI:10.2514/1.60820 |
| [34] | 李辕, 赵继广, 闫梁, 等. 拦截高速机动目标三维联合比例制导律设计[J].北京航空航天大学学报, 2015, 41(5): 825–834. LI Y, ZHAO J G, YAN L, et al. United-proportional-navigation law for interception of high-speed maneuvering targets[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5): 825–834.(in Chinese) |
| [35] | TANG W, CAI Y. Predictive functional control-based missile autopilot design[J].Journal of Guidance, Control, and Dynamics, 2012, 35(5): 1450–1455.DOI:10.2514/1.56329 |
| [36] | LUO Y, SERRANI A, YURKOVICH S, et al. Model-predictive dynamic control allocation scheme for reentry vehicles[J].Journal of Guidance, Control, and Dynamics, 2007, 30(1): 100–113.DOI:10.2514/1.25473 |
| [37] | WILLIAMS P. Libration control of electrodynamic tethers using predictive control with time-delayed feedback[J].Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1254–1268.DOI:10.2514/1.41039 |
| [38] | ARDEMA M D. Solution of the minimum time-to-climb problem by matched asymptotic expansions[J].AIAA Journal, 1976, 14(7): 843–850.DOI:10.2514/3.7161 |
| [39] | KUO Z, LIU K. Explicit guidance of aeroassisted orbital transfer using matched asymptotic expansions[J].Journal of Guidance, Control, and Dynamics, 2002, 25(1): 80–87.DOI:10.2514/2.4852 |
| [40] | 李辕, 赵继广, 白国玉, 等. 基于预测碰撞点的剩余飞行时间估计方法[J].北京航空航天大学学报, 2016, 42(8): 1667–1674. LI Y, ZHAO J G, BAI G Y, et al. Method of time-to-go estimation based on predicted crack point[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1667–1674.(in Chinese) |
| [41] | CARTER J P, PERLMUTTER L D. Reference trajectory re-entry guidance without prelaunch data storage[J].Journal of Spacecraft and Rockets, 1965, 2(6): 967–970.DOI:10.2514/3.28325 |
| [42] | TANNAS J L E. Manual entry guidance[J].Journal of Spacecraft and Rockets, 1966, 3(2): 175–181.DOI:10.2514/3.28415 |
| [43] | LEAVITT J A, MEASE K D. Feasible trajectory generation for atmospheric entry guidance[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2): 473–481.DOI:10.2514/1.23034 |
| [44] | KLUEVER C A. Entry guidance using analytical atmospheric skip trajectories[J].Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1531–1535.DOI:10.2514/1.32314 |
| [45] | JOSHI A, SIVAN K, AMMA S S. Predictor-corrector reentry guidance algorithm with path constraints for atmospheric entry vehicles[J].Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1307–1318.DOI:10.2514/1.26306 |
